技术特征:
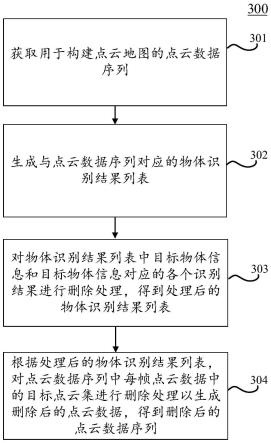
1.一种数据处理方法,包括:获取用于构建点云地图的点云数据序列;生成与所述点云数据序列对应的物体识别结果列表,其中,所述物体识别结果列表包括识别出的各个物体信息和所述各个物体信息中每个物体信息的各个识别结果;对所述物体识别结果列表中目标物体信息和所述目标物体信息对应的各个识别结果进行删除处理,得到处理后的物体识别结果列表;根据所述处理后的物体识别结果列表,对所述点云数据序列中每帧点云数据中的目标点云集进行删除处理以生成删除后的点云数据,得到删除后的点云数据序列,其中,所述目标点云集表征所述每帧点云数据中的移动障碍物体。2.根据权利要求1所述的方法,其中,所述生成与所述点云数据序列对应的物体识别结果列表,包括:响应于所述点云数据序列中的目标点云数据不是所述点云数据序列中的第一帧点云数据,执行以下物体识别结果列表生成步骤:确定所述目标点云数据的至少一个识别结果;将所述至少一个识别结果依据预设条件融入初始物体识别结果列表,得到融入后的初始物体识别结果列表,其中,所述初始物体识别结果列表与所述点云数据序列中的、所述目标点云数据之前的点云数据序列相关;将所述融入后的初始物体识别结果列表确定为初始物体识别结果列表;确定所述目标点云数据是否存在下一帧点云数据;响应于不存在,将所述初始物体识别结果列表确定为所述物体识别结果列表。3.根据权利要求2所述的方法,其中,所述方法还包括:响应于存在,确定所述目标点云数据的下一帧点云数据作为所述目标点云数据,继续执行所述物体识别结果列表生成步骤。4.根据权利要求2所述的方法,其中,所述方法还包括:响应于所述目标点云数据为所述点云数据序列中的第一帧点云数据,将所述第一帧点云数据对应的至少一个物体识别结果写入预先建立的、空的初始物体识别结果列表以及将所述第一帧点云数据的下一帧点云数据确定为目标点云数据,继续执行所述物体识别结果列表生成步骤。5.根据权利要求2所述的方法,其中,所述识别结果包括:物体信息的识别次数和物体信息的各个识别分数;以及所述对所述物体识别结果列表中目标物体信息和所述目标物体信息对应的各个识别结果进行删除处理,得到处理后的物体识别结果列表,包括:根据所述物体识别结果列表,确定各个物体信息中每个物体信息的识别次数和对应的各个识别分数中最高的识别分数;从所述物体识别结果列表中去除识别次数小于第一阈值和/或最高的识别分数小于第二阈值的目标物体信息和所述目标物体信息对应的各个识别结果,得到处理后的物体识别结果列表。6.根据权利要求1所述的方法,其中,所述根据所述处理后的物体识别结果列表,对所述点云数据序列中每帧点云数据中的目标点云集进行删除处理以生成删除后的点云数据,
得到删除后的点云数据序列,包括:根据所述处理后的物体识别结果列表,确定各个物体信息的出现时间;依据所述点云数据序列的正向顺序,对每帧点云数据进行如下操作:确定所述每帧点云数据对应的时间与所述各个物体信息中每个物体信息出现时间的时间差;根据所述时间差,将所述每个物体信息对应的包围盒叠加至所述每帧点云数据中对应位置上;确定所述每帧点云数据中的至少一个包围盒中是否有包围盒中存在点云;响应于确定存在,将所述物体识别结果列表中所述每个物体信息的各个识别结果中分别添加对应点云数据中的、与所述物体信息相关联的包围盒的几何中心信息,得到添加后的物体识别结果列表。7.根据权利要求6所述的方法,其中,所述方法还包括:依据所述点云数据序列的反向顺序,对每帧点云数据进行如下操作:确定所述每帧点云数据对应的时间与所述各个物体信息中每个物体信息出现时间的时间差;根据所述时间差,将所述每个物体信息对应的包围盒叠加至所述每帧点云数据中对应位置上;确定所述每帧点云数据中的至少一个包围盒中是否有包围盒中存在点云;响应于确定存在,将所述添加后的物体识别结果列表中所述每个物体信息的各个识别结果中分别添加对应点云数据中的、与所述物体信息相关联的包围盒的几何中心信息。8.根据权利要求7所述的方法,其中,所述方法还包括:根据每帧点云数据对应的包围盒的几何中心信息和所述包围盒的体积信息,对所述点云数据序列中每帧点云数据中的目标点云集进行删除处理以生成删除后的点云数据,得到删除后的点云数据序列。9.根据权利要求1所述的方法,其中,所述方法还包括:将所述删除后的点云数据序列进行存储以用于后续构建所述点云地图。10.一种数据处理装置,包括:获取单元,被配置成获取用于构建点云地图的点云数据序列;生成单元,被配置成生成与所述点云数据序列对应的物体识别结果列表,其中,所述物体识别结果列表包括识别出的各个物体信息和所述各个物体信息中每个物体信息的各个识别结果;第一处理单元,被配置成对所述物体识别结果列表中目标物体信息和所述目标物体信息对应的各个识别结果进行删除处理,得到处理后的物体识别结果列表;第二处理单元,被配置成根据所述处理后的物体识别结果列表,对所述点云数据序列中每帧点云数据中的目标点云集进行删除处理以生成删除后的点云数据,得到删除后的点云数据序列,其中,所述目标点云集表征所述每帧点云数据中的移动障碍物体。11.一种电子设备,包括:一个或多个处理器;存储装置,其上存储有一个或多个程序,
当所述一个或多个程序被所述一个或多个处理器执行,使得所述一个或多个处理器实现如权利要求1-9中任一所述的方法。12.一种计算机可读介质,其上存储有计算机程序,其中,所述程序被处理器执行时实现如权利要求1-9中任一所述的方法。
技术总结
本公开的实施例公开了数据处理方法、装置、电子设备和介质。该方法的一具体实施方式包括:获取用于构建点云地图的点云数据序列;生成与该点云数据序列对应的物体识别结果列表;对该物体识别结果列表中目标物体信息和该目标物体信息对应的各个识别结果进行删除处理,得到处理后的物体识别结果列表;根据该处理后的物体识别结果列表,对该点云数据序列中每帧点云数据中的目标点云集进行删除处理以生成删除后的点云数据,得到删除后的点云数据序列,其中,该目标点云集表征该每帧点云数据中的移动障碍物体。该实施方式可以快捷、高效的删除点云数据序列中每帧点云数据中与移动障碍物体相关联的目标点云集。障碍物体相关联的目标点云集。障碍物体相关联的目标点云集。
技术研发人员:王冰
受保护的技术使用者:北京京东乾石科技有限公司
技术研发日:2021.03.02
技术公布日:2022/9/1
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。