1.本技术涉及空气悬挂技术领域,尤其涉及一种检测方法及相关设备。
背景技术:
2.随着人民生活水平的日益提升,人们对汽车驾驶的要求越来越高。一辆高品质的城郊实用汽车(sport utility vehicle,suv)既要拥有轿车的舒适性,又要兼顾越野车的通过性能。市面上推出的空气悬挂系统是实现这一目标的最佳选择。其中,空气悬挂系统可以根据路况的不同以及距离传感器的信号,通过行车电脑判断出车身高度变化,再控制空气压缩机和排气阀门,使弹簧自动压缩或伸长,从而降低或升高汽车底盘的离地间隙,以增加高速车身稳定性或复杂路况的通过性,从而可以提高乘坐的舒适性和操控感。
3.然而,空气压缩机打到空气弹簧里的气体中通常会含有一定的水分,且该水分含有各种杂质,并非纯净水。在空气悬挂系统的使用期间,空气弹簧里的杂质会不断积累,空气弹簧的橡胶也会逐渐老化,最终导致破裂。很多汽车制造厂家为了解决上述问题,往往会选择使用干燥剂对空气弹簧里的气体进行干燥,但是,由于干燥剂本身其使用寿命较短,若不及时补充,后期空气弹簧仍旧会产生较为严重的老化和损坏。并且,由于空气悬挂系统的工作原理,需要频繁的进行气体的压缩和释放,从而进一步缩短了橡胶材料的使用寿命。
4.通常情况下,空气悬挂系统故障的概率会随着其使用时间呈指数增长,从而为车主带来了极大的驾驶隐患。然而,由于空气悬挂系统结构较为复杂,在车主对其车辆进行保养和维护的时候,经常会忽略对空气悬挂系统的检测和维修。因此,大多数的车主对于其车辆内的空气悬挂系统的具体状态并不知情,即使在空气悬挂系统濒临寿命时,也意识不到这个隐患,如此,便会危害车主的驾驶安全,甚至造成严重的交通事故,危害公众的生命和财产安全。
5.因此,如何实现对汽车内空气悬挂系统更加全面、准确的检测,保证车主的驾驶安全是亟待解决的问题。
技术实现要素:
6.本技术实施例提供一种检测方法及相关设备,可以更加全面、准确的对车辆内的空气悬挂系统进行实时检测,保证驾驶安全。
7.第一方面,本技术实施例提供了一种检测方法,应用于服务端,其中,该方法可以包括:获取第一数据集合;所述第一数据集合包括与第一车辆的空气悬挂系统相关的m个数据;m为大于或者等于1的整数;获取n个第二数据集合;所述n个第二数据集合中的每一个第二数据集合包括所述m个数据中的一个或多个数据;所述n个第二数据集合对应n类特征,所述n类特征包括所述空气悬挂系统的调节特征、寿命特征和材料特征中的一个或多个;n为大于或者等于1的整数;根据所述n个第二数据集合以及所述n类特征对应的权重,确定所述空气悬挂系统的第一检测结果。
8.在一种可能的实现方式中,所述第一数据集合中的所述m个数据为所述第一车辆
在行驶过程中和/或在驻车状态下采集到的数据。
9.通过第一方面提供的方法,在车辆(如第一车辆)行驶或者驻车过程中,服务端可以接收该车辆上传的大量数据(例如可以包括在车辆行驶过程中针对其车内的空气悬挂系统实时采集的空气悬挂系统每次调节时的压缩气体体积、释放气体体积和上升温度等数据)。然后,服务端可以基于不同数据的不同特征,对该接收到的大量数据进行分类,得到各类特征各自对应的数据集合。最终,服务端可以综合考量该各类特征各自对应的数据集合以及该各类特征各自的权重,计算得到该空气悬挂系统的检测结果(例如计算该悬挂系统当前的磨损率等等),从而实现多维度、更全面、更准确地对该空气悬挂系统进行检测。然而,现有技术中,在对空气悬挂系统进行检测时,往往只能通过本地端相应的检测设备对空气悬挂系统内的部分部件进行个别项目的检测,从而导致检测结果不全面、不精准,严重危害驾驶员的驾驶安全,甚至造成严重的交通事故,损伤公共财产和人身安全等。如此,相较于现有技术,本技术实施例可以将车辆在行驶过程中实时采集到的针对空气悬挂系统的大量数据上传至服务端,然后在该大量数据的支撑下,基于数据的不同特征(例如调节特征、寿命特征和材料特征等)以及各类特征各自的权重(例如考虑到不同特征的数据对空气悬挂系统的使用状况的影响程度),建立更加精准有效的多维度检测体系,从而实现对空气悬挂系统更加全面、精准的实时检测,有效避免因为空气悬挂系统突发故障引起的交通事故,保证驾驶安全。
10.在一种可能的实现方式中,上述方法还可以包括:基于所述空气悬挂系统的所述第一检测结果,确定所述空气悬挂系统的第二检测结果;所述第一检测结果包括所述空气悬挂系统的磨损率;所述第二检测结果包括所述空气悬挂系统的故障易发率和所述空气悬挂系统的可使用时长。
11.在本技术实施例中,服务端还可以基于计算得到的第一检测结果(例如空气悬挂系统的磨损率)进一步地评估当前空气悬挂系统的故障易发率以及可使用时长等等,从而实现对空气悬挂系统更加全面,多层次的检测,进一步可以让用户更加全面、直观地掌握其车辆内的空气悬挂系统的使用状况(或者说是空气悬挂系统的健康状态),有效保证驾驶安全。
12.在一种可能的实现方式中,所述获取第一数据集合,包括:接收来自所述第一车辆的数据流;所述数据流包括与所述空气悬挂系统相关的k个数据;基于重要性采样方法对所述数据流包括的所述k个数据进行采样,获取所述第一数据集合;所述k个数据中包括所述m个数据;k为大于或者等于m的整数。
13.在本技术实施例中,车辆可以将采集到的大量数据以数据流的形式实时上传至服务端。服务端可以通过重要性采样方法对数据流中的大量数据进行采样,获取其中的部分数据,需要说明的是,虽然对数据流中的大量数据进行了采样,但服务端最终获取的数据仍然是大量的,从而可以在保证检测结果的准确性的前提下,进一步降低运行成本和计算量,保证检测效率等等。
14.在一种可能的实现方式中,上述方法还可以包括:接收所述第一车辆发送的查询请求;基于所述查询请求,向所述第一车辆发送所述空气悬挂系统的所述第一检测结果和所述第二检测结果。
15.在本技术实施例中,当用户想要了解自己车辆内的空气悬挂系统的健康状态时,
可以通过车辆向服务端发送相应的查询请求,相应的,服务端接收该查询请求。然后,服务端可以基于该查询请求,向该车辆发送相应的检测结果(如第一检测结果和第二检测结果,也即可以为上述的空气悬挂系统的磨损率、故障易发率和可使用时长等)。从而使得用户可以及时掌握自己车辆内的空气悬挂系统的健康状态,以便在磨损严重或者濒临使用寿命时及时的进行维修,从而避免在行驶过程中空气悬挂系统突发故障,有效降低驾驶隐患,保证驾驶安全。
16.在一种可能的实现方式中,上述方法还可以包括:确定所述第一车辆在行驶过程中对应的目标地形,并将所述目标地形发送至所述第一车辆;所述目标地形用于所述第一车辆根据所述目标地形对所述空气悬挂系统下发对应的调控策略;所述目标地形为沙地、雪地、岩石和冰面中的一种;所述调控策略包括针对所述空气悬挂系统对应的高度参数、震动参数和阻尼参数中的至少一种参数的调控策略。
17.在本技术实施例中,服务端还可以基于车辆行驶过程中采集的数据(例如空气悬挂系统的功率信号等)确定其当前的地形(比如为沙地、雪地、岩石或者冰面等)。然后,服务端可以将该地形(例如具体可以为针对该地形预先构建的地形模型)发送至车辆。最终,车辆可以根据该地形对其空气悬挂系统对应的高度参数、震动参数和阻尼参数等下发对应的调控策略,从而可以有效提高驾驶的舒适度,并且可以减少极端地形对空气悬挂系统的磨损,保证驾驶安全。
18.在一种可能的实现方式中,上述方法还可以包括:若所述第一检测结果和/或所述第二检测结果满足预设条件,则向所述第一车辆发送所述第一检测结果、所述第二检测结果以及相应的警告信息;所述警告信息用于警告用户对所述空气悬挂系统进行维修;其中,所述预设条件包括所述空气悬挂系统的所述磨损率大于第一阈值和/或所述空气悬挂系统的所述故障易发率大于第二阈值和/或所述空气悬挂系统的所述可使用时长小于第三阈值。
19.在本技术实施例中,若服务端计算得到该空气悬挂系统的磨损率、故障易发率和可使用时长等中的任意一项或者多项已危害驾驶安全(例如该磨损率大于第一阈值(比如50%),该故障易发率大于第二阈值(比如40%),可使用时长小于第三阈值(比如30小时)),也即经服务端检测,该空气悬挂系统受损较为严重,容易危害驾驶安全,需要进行维修的情况下,该服务端可以直接向给对应的车辆发送其检测结果以及相应的警告信息。该警告信息可以用于井盖车主对其空气悬挂系统进行维修,从而避免因驾驶过程中空气悬挂系统突发故障引起的交通事故,有效保证驾驶安全。
20.在一种可能的实现方式中,上述方法还可以包括:若所述第一检测结果和/或所述第二检测结果满足所述预设条件,则获取在所述第一车辆的预设范围内的至少一个汽车维修店的信息,并向所述第一车辆发送所述至少一个汽车维修店的信息;所述信息包括所述至少一个汽车维修店各自的地址、与所述第一车辆之间的距离、收费价格、用户评价和驾驶路径规划中的至少一种。
21.在本技术实施例中,如上所述,经服务端检测,该空气悬挂系统受损较为严重,容易危害驾驶安全,需要进行维修的情况下,该服务端还可以进一步向该车辆推送其附近的汽车维修店(或者4s店等等)的信息,比如汽车维修店的地址、与当前车辆的距离、收费价格、用户评价和驾驶路径规划等等。从而为车主提供维修便利,使得车主可以及时对其车辆
内的空气悬挂系统进行维修,保证驾驶安全。
22.在一种可能的实现方式中,所述根据所述n个第二数据集合以及所述n类特征对应的权重,确定所述空气悬挂系统的第一检测结果,包括:基于所述n个第二数据集合以及预设的评分标准,分别计算得到所述n类特征各自对应的分数值;基于所述n类特征各自对应的分数值,以及所述n类特征各自的权重,计算得到所述空气悬挂系统的所述第一检测结果。
23.在本技术实施例中,服务端首先可以基于获取的各类特征对应的数据集合,以及预设的评分标准,计算得到各类特征对应的分数值,比如分数值越高可以代表受损越严重。然后,服务端可以基于上述各类特征对应的分数值以及各类特征的权重,计算得到该空气悬挂系统的第一检测结果。如此,本技术实施例可以综合考虑空气悬挂系统中的各类数据对其磨损率的影响程度,使得计算得到空气悬挂系统的磨损率更加全面、精准和有效,从而实现对空气悬挂系统将更加全面、精准的检测,有效避免因为空气悬挂系统突发故障引起的交通事故,保证驾驶安全。
24.在一种可能的实现方式中,上述方法还可以包括:获取第三数据集合,所述第三数据集合包括与多个第二车辆各自的空气悬挂系统相关的p个数据;p为大于1的整数;基于所述第三数据集合,确定所述多个第二车辆各自的第一检测结果;基于所述多个第二车辆各自的所述第一检测结果和所述第一车辆的所述第一检测结果,对所述评分标准和/或所述n类特征各自的权重进行修正。
25.在本技术实施例中,服务端还可以接收多部车辆在行驶或者停车时各自上传的针对其车内的空气悬挂系统等采集到的大量数据,并基于上述方法对该多部车辆各自的空气悬挂系统进行检测,计算得到该多部车辆各自的空气悬挂系统的检测结果。然后,服务端可以基于大量的检测结果(例如计算得到的大量车内的空气悬挂系统的磨损率),对计算过程中使用到的原先的评分标准和/或各类特征各自的权重进行修正。从而进一步提高检测结果的准确率,避免因检测结果不准确,而未及时对空气悬挂系统进行维修引发的交通事故,有效保证驾驶安全。
26.在一种可能的实现方式中,所述m个数据包括与所述空气悬挂系统相关的至少一次压缩气体体积、至少一次释放气体体积、至少一次上升温度、至少一次空气压缩密度、以及所述空气悬挂系统的调节频率、使用时长、产品型号和产品规格中的多个;其中,所述调节特征对应的第二数据集合中包括所述至少一次压缩气体体积、所述至少一次释放气体体积、所述至少一次上升温度、所述至少一次空气压缩密度以及所述调节频率中的一个或多个;所述寿命特征对应的所述第二数据集合中包括所述使用时长;所述材料特征对应的所述第二数据集合中包括所述产品型号和所述产品规格中的一个或多个。
27.在本技术实施例中,车辆可以在行驶过程中针对其中的空气悬挂系统进行全方位的数据采集,例如可以包括空气悬挂系统在所述第一车辆行驶过程中进行调节时相关的压缩气体体积、释放气体体积、上升温度、空气压缩密度、以及相应的调节频率、使用时长、产品型号和产品规格等等数据。全面丰富了用于进行空气悬挂系统检测的数据,如此,在全方位大量数据的支撑下,使得本技术实施例得到的检测结果更加全面、准确,有效保证了驾驶安全。
28.第二方面,本技术实施例提供了一种检测方法,该方法可以包括:获取数据流,并
发送所述数据流至服务端;所述数据流包括与第一车辆的空气悬挂系统相关的k个数据;所述数据流用于所述服务端基于重要性采样方法对所述数据流包括的所述k个数据进行采样,获取对应的第一数据集合;所述第一数据集合包括与第一车辆的所述空气悬挂系统相关的m个数据;所述k个数据中包括所述m个数据;所述m个数据用于所述服务端获取n个第二数据集合;所述n个第二数据集合中的每一个第二数据集合包括所述m个数据中的一个或多个数据;所述n个第二数据集合对应n类特征,所述n类特征包括所述空气悬挂系统的调节特征、寿命特征和材料特征中的一个或多个;所述n个第二数据集合用于所述服务端基于所述n个第二数据集合以及所述n类特征对应的权重,确定所述空气悬挂系统的第一检测结果;m、n为大于或者等于1的整数,k为大于或者等于m的整数。
29.通过第二方面提供的方法,在车辆(如第一车辆)行驶或者驻车的过程中,该车辆可以实时采集与空气悬挂系统相关的数据(例如可以采集在车辆行驶过程中,每次调节时的压缩气体体积、释放气体体积和上升温度等数据),并将采集到的大量数据以数据流的形式实时上传至服务端。其中,可选地,服务端可以通过重要性采样方法对数据流中的大量数据进行采样,获取其中的部分数据,以降低运行成本。然后,服务端可以基于不同数据的不同特征,对获取到的大量数据进行分类,得到各类特征各自对应的数据集合。最终,服务端可以综合考量该各类特征各自对应的数据集合以及该各类特征各自的权重,计算得到该空气悬挂系统的检测结果(例如计算该悬挂系统当前的磨损率等等),从而实现多维度,更全面、准确地对该空气悬挂系统进行检测。然而,现有技术中,在对空气悬挂系统进行检测时,往往只能通过本地端相应的检测设备对空气悬挂系统内的部分部件进行个别项目的检测,从而导致检测结果不全面、不精准,严重危害驾驶员的驾驶安全,甚至造成严重的交通事故,损伤公共财产和人身安全等。如此,相较于现有技术,本技术实施例可以将车辆在行驶过程中实时采集到的针对空气悬挂系统的大量数据上传至服务端,然后在该大量数据的支撑下,基于数据的不同特征以及各类特征各自的权重(例如考虑到不同特征的数据对空气悬挂系统的使用状况的影响程度),建立更加精准有效的多维度检测体系,从而实现对空气悬挂系统更加全面、精准的实时检测,有效避免因为空气悬挂系统突发故障引起的交通事故,保证驾驶安全。
30.应理解,第二方面的执行主体为第一车辆,第二方面的具体内容与第一方面的内容对应,第二方面相应特征以及达到的有益效果可以参考第一方面的描述,为避免重复,此处适当省略详细描述。
31.在一种可能的实现方式中,所述第一检测结果用于所述服务端基于所述第一检测结果,确定所述空气悬挂系统的第二检测结果;所述第一检测结果包括所述空气悬挂系统的磨损率;所述第二检测结果包括所述空气悬挂系统的故障易发率和所述空气悬挂系统的可使用时长。
32.在一种可能的实现方式中,所述方法还包括:向所述服务端发送查询请求;接收所述服务端基于所述查询请求发送的所述空气悬挂系统的所述第一检测结果和所述第二检测结果。
33.在一种可能的实现方式中,所述方法还包括:接收所述服务端发送的目标地形,并根据所述目标地形对所述空气悬挂系统下发对应的调控策略;所述目标地形为所述服务端确定的所述第一车辆在行驶过程中对应的地形;所述目标地形为沙地、雪地、岩石和冰面中
的一种;所述调控策略包括针对所述空气悬挂系统对应的高度参数、震动参数和阻尼参数中的至少一种参数的调控策略。
34.在一种可能的实现方式中,所述方法还包括:若所述第一检测结果和/或所述第二检测结果满足预设条件,则接收所述服务端发送的所述第一检测结果、所述第二检测结果以及相应的警告信息;所述警告信息用于警告用户对所述空气悬挂系统进行维修;其中,所述预设条件包括所述空气悬挂系统的所述磨损率大于第一阈值和/或所述空气悬挂系统的所述故障易发率大于第二阈值和/或所述空气悬挂系统的所述可使用时长小于第三阈值。
35.在一种可能的实现方式中,所述方法还包括:若所述第一检测结果和/或所述第二检测结果满足预设条件,则接收所述服务端发送的在所述第一车辆的预设范围内的至少一个汽车维修店的信息;所述信息包括所述至少一个汽车维修店各自的地址、与所述第一车辆之间的距离、收费价格、用户评价和驾驶路径规划中的至少一种。
36.在一种可能的实现方式中,所述m个数据包括与所述空气悬挂系统相关的至少一次压缩气体体积、至少一次释放气体体积、至少一次上升温度、至少一次空气压缩密度、以及所述空气悬挂系统的调节频率、使用时长、产品型号和产品规格中的多个;其中,所述调节特征对应的第二数据集合中包括所述至少一次压缩气体体积、所述至少一次释放气体体积、所述至少一次上升温度、所述至少一次空气压缩密度以及所述调节频率中的一个或多个;所述寿命特征对应的所述第二数据集合中包括所述使用时长;所述材料特征对应的所述第二数据集合中包括所述产品型号和所述产品规格中的一个或多个。
37.第三方面,本技术实施例提供了一种检测装置,应用于服务端,该装置包括:
38.第一获取单元,用于获取第一数据集合;所述第一数据集合包括与第一车辆的空气悬挂系统相关的m个数据;m为大于或者等于1的整数;
39.第二获取单元,用于获取n个第二数据集合;所述n个第二数据集合中的每一个第二数据集合包括所述m个数据中的一个或多个数据;所述n个第二数据集合对应n类特征,所述n类特征包括所述空气悬挂系统的调节特征、寿命特征和材料特征中的一个或多个;n为大于或者等于1的整数;
40.第一确定单元,用于根据所述n个第二数据集合以及所述n类特征对应的权重,确定所述空气悬挂系统的第一检测结果。
41.在一种可能的实现方式中,该装置还包括:
42.第二确定单元,用于基于所述空气悬挂系统的所述第一检测结果,确定所述空气悬挂系统的第二检测结果;所述第一检测结果包括所述空气悬挂系统的磨损率;所述第二检测结果包括所述空气悬挂系统的故障易发率和所述空气悬挂系统的可使用时长。
43.在一种可能的实现方式中,所述第一获取单元,具体用于:
44.接收来自所述第一车辆的数据流;所述数据流包括与所述空气悬挂系统相关的k个数据;
45.基于重要性采样装置对所述数据流包括的所述k个数据进行采样,获取所述第一数据集合;所述k个数据中包括所述m个数据;k为大于或者等于m的整数。
46.在一种可能的实现方式中,该装置还包括:
47.接收单元,用于接收所述第一车辆发送的查询请求;
48.第一发送单元,用于基于所述查询请求,向所述第一车辆发送所述空气悬挂系统
的所述第一检测结果和所述第二检测结果。
49.在一种可能的实现方式中,该装置还包括:
50.第二发送单元,用于确定所述第一车辆在行驶过程中对应的目标地形,并将所述目标地形发送至所述第一车辆;所述目标地形用于所述第一车辆根据所述目标地形对所述空气悬挂系统下发对应的调控策略;所述目标地形为沙地、雪地、岩石和冰面中的一种;所述调控策略包括针对所述空气悬挂系统对应的高度参数、震动参数和阻尼参数中的至少一种参数的调控策略。
51.在一种可能的实现方式中,该装置还包括:
52.第三发送单元,用于若所述第一检测结果和/或所述第二检测结果满足预设条件,则向所述第一车辆发送所述第一检测结果、所述第二检测结果以及相应的警告信息;所述警告信息用于警告用户对所述空气悬挂系统进行维修;其中,所述预设条件包括所述空气悬挂系统的所述磨损率大于第一阈值和/或所述空气悬挂系统的所述故障易发率大于第二阈值和/或所述空气悬挂系统的所述可使用时长小于第三阈值。
53.在一种可能的实现方式中,该装置还包括:
54.第四发送单元,用于若所述第一检测结果和/或所述第二检测结果满足所述预设条件,则获取在所述第一车辆的预设范围内的至少一个汽车维修店的信息,并向所述第一车辆发送所述至少一个汽车维修店的信息;所述信息包括所述至少一个汽车维修店各自的地址、与所述第一车辆之间的距离、收费价格、用户评价和驾驶路径规划中的至少一种。
55.在一种可能的实现方式中,所述第一确定单元,具体用于:
56.基于所述n个第二数据集合以及预设的评分标准,分别计算得到所述n类特征各自对应的分数值;
57.基于所述n类特征各自对应的分数值,以及所述n类特征各自的权重,计算得到所述空气悬挂系统的所述第一检测结果。
58.在一种可能的实现方式中,该装置还包括:
59.第三获取单元,用于获取第三数据集合,所述第三数据集合包括与多个第二车辆各自的空气悬挂系统相关的p个数据;p为大于1的整数;
60.第三确定单元,用于基于所述第三数据集合,确定所述多个第二车辆各自的第一检测结果;
61.修正单元,用于基于所述多个第二车辆各自的所述第一检测结果和所述第一车辆的所述第一检测结果,对所述评分标准和/或所述n类特征各自的权重进行修正。
62.在一种可能的实现方式中,所述m个数据包括与所述空气悬挂系统相关的至少一次压缩气体体积、至少一次释放气体体积、至少一次上升温度、至少一次空气压缩密度、以及所述空气悬挂系统的调节频率、使用时长、产品型号和产品规格中的多个;其中,所述调节特征对应的第二数据集合中包括所述至少一次压缩气体体积、所述至少一次释放气体体积、所述至少一次上升温度、所述至少一次空气压缩密度以及所述调节频率中的一个或多个;所述寿命特征对应的所述第二数据集合中包括所述使用时长;所述材料特征对应的所述第二数据集合中包括所述产品型号和所述产品规格中的一个或多个。
63.在一种可能的实现方式中,所述第二获取单元,具体用于:
64.基于所述n类特征,将所述m个数据进行分类,得到所述n类特征对应的n个第二数
据集合。
65.第四方面,本技术实施例提供了一种检测装置,该装置可以包括:
66.获取单元,用于获取数据流,并发送所述数据流至服务端;所述数据流包括与第一车辆的空气悬挂系统相关的k个数据;所述数据流用于所述服务端基于重要性采样方法对所述数据流包括的所述k个数据进行采样,获取对应的第一数据集合;所述第一数据集合包括与第一车辆的所述空气悬挂系统相关的m个数据;所述k个数据中包括所述m个数据;所述m个数据用于所述服务端获取n个第二数据集合;所述n个第二数据集合中的每一个第二数据集合包括所述m个数据中的一个或多个数据;所述n个第二数据集合对应n类特征,所述n类特征包括所述空气悬挂系统的调节特征、寿命特征和材料特征中的一个或多个;所述n个第二数据集合用于所述服务端基于所述n个第二数据集合以及所述n类特征对应的权重,确定所述空气悬挂系统的第一检测结果;m、n为大于或者等于1的整数,k为大于或者等于m的整数。
67.在一种可能的实现方式中,所述第一检测结果用于所述服务端基于所述第一检测结果,确定所述空气悬挂系统的第二检测结果;所述第一检测结果包括所述空气悬挂系统的磨损率;所述第二检测结果包括所述空气悬挂系统的故障易发率和所述空气悬挂系统的可使用时长。
68.在一种可能的实现方式中,该装置还包括:
69.发送单元,用于向所述服务端发送查询请求;
70.第一接收单元,用于接收所述服务端基于所述查询请求发送的所述空气悬挂系统的所述第一检测结果和所述第二检测结果。
71.在一种可能的实现方式中,该装置还包括:
72.第二接收单元,用于接收所述服务端发送的目标地形,并根据所述目标地形对所述空气悬挂系统下发对应的调控策略;所述目标地形为所述服务端确定的所述第一车辆在行驶过程中对应的地形;所述目标地形为沙地、雪地、岩石和冰面中的一种;所述调控策略包括针对所述空气悬挂系统对应的高度参数、震动参数和阻尼参数中的至少一种参数的调控策略。
73.在一种可能的实现方式中,该装置还包括:
74.第三接收单元,用于若所述第一检测结果和/或所述第二检测结果满足预设条件,则接收所述服务端发送的所述第一检测结果、所述第二检测结果以及相应的警告信息;所述警告信息用于警告用户对所述空气悬挂系统进行维修;其中,所述预设条件包括所述空气悬挂系统的所述磨损率大于第一阈值和/或所述空气悬挂系统的所述故障易发率大于第二阈值和/或所述空气悬挂系统的所述可使用时长小于第三阈值。
75.在一种可能的实现方式中,该装置还包括:
76.第四接收单元,用于若所述第一检测结果和/或所述第二检测结果满足预设条件,则接收所述服务端发送的在所述第一车辆的预设范围内的至少一个汽车维修店的信息;所述信息包括所述至少一个汽车维修店各自的地址、与所述第一车辆之间的距离、收费价格、用户评价和驾驶路径规划中的至少一种。
77.在一种可能的实现方式中,所述m个数据包括与所述空气悬挂系统相关的至少一次压缩气体体积、至少一次释放气体体积、至少一次上升温度、至少一次空气压缩密度、以
及所述空气悬挂系统的调节频率、使用时长、产品型号和产品规格中的多个;其中,所述调节特征对应的第二数据集合中包括所述至少一次压缩气体体积、所述至少一次释放气体体积、所述至少一次上升温度、所述至少一次空气压缩密度以及所述调节频率中的一个或多个;所述寿命特征对应的所述第二数据集合中包括所述使用时长;所述材料特征对应的所述第二数据集合中包括所述产品型号和所述产品规格中的一个或多个。
78.第五方面,本技术实施例提供的一种服务端,该服务端中包括处理器,处理器被配置为支持该服务端实现第一方面提供的检测方法中相应的功能。该服务端还可以包括存储器,存储器用于与处理器耦合,其保存该服务端必要的程序指令和数据。该服务端还可以包括通信接口,用于该服务端与其他设备或通信网络通信。
79.第六方面,本技术实施例提供的一种智能车辆,该智能车辆为第一车辆,该智能车辆中包括处理器,处理器被配置为支持该智能车辆实现第二方面提供的检测方法中相应的功能。该智能车辆还可以包括存储器,存储器用于与处理器耦合,其保存该智能车辆必要的程序指令和数据。该智能车辆还可以包括通信接口,用于该智能车辆与其他设备或通信网络通信。
80.第七方面,本技术实施例提供一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,该计算机程序被处理器执行时实现上述第一方面中任意一项所述的检测方法流程,或者实现上述第二方面中任意一项所述的检测方法流程。
81.第八方面,本技术实施例提供了一种计算机程序,该计算机程序包括指令,当该计算机程序被计算机执行时,使得计算机可以执行上述第一方面中任意一项所述的检测方法流程,或者执行上述第二方面中任意一项所述的检测方法流程。
82.第九方面,本技术实施例提供了一种芯片系统,该芯片系统可以包括上述第三方面中任意一项所述的检测装置,用于实现上述第一方面中任意一项所述的检测方法流程所涉及的功能。或者,该芯片系统可以包括上述第四方面中任意一项所述的检测装置,用于实现上述第二方面中任意一项所述的检测方法流程所涉及的功能。在一种可能的设计中,所述芯片系统还包括存储器,所述存储器,用于保存检测方法必要的程序指令和数据。该芯片系统,可以由芯片构成,也可以包含芯片和其他分立器件。
附图说明
83.为了更清楚地说明本技术实施例中的技术方案,下面将对本技术实施例或背景技术中所需要使用的附图进行说明。
84.图1是一种空气悬挂系统的结构示意图。
85.图2a是本技术实施例提供的一种空气悬挂系统故障率分析示意图。
86.图2b是本技术实施例提供的一种空气悬挂系统故障原因分析示意图。
87.图3是一种汽车空气悬挂系统充气泵自动检测系统示意图。
88.图4a是本技术实施例提供的一种智能车辆的功能框图。
89.图4b是本技术实施例提供的一种空气悬挂系统的结构示意图。
90.图5是本技术实施例提供的一种检测方法的系统架构示意图。
91.图6a是本技术实施例提供的一种应用场景示意图。
92.图6b是本技术实施例提供的另一种应用场景示意图。
93.图7是本技术实施例提供的一种检测方法的流程示意图。
94.图8是本技术实施例提供的另一种检测方法的流程示意图。
95.图9是本技术实施例提供的一种检测方法的整体流程图。
96.图10是本技术实施例提供的一种数据采样的示意图。
97.图11是本技术实施例提供的一种地形识别的流程示意图。
98.图12a是本技术实施例提供的一种阻尼调节的示意图。
99.图12b是本技术实施例提供的另一种阻尼调节的示意图。
100.图13是本技术实施例提供的另一种检测方法的整体流程图。
101.图14是本技术实施例提供的一种检测装置的结构示意图。
102.图15是本技术实施例提供的另一种检测装置的结构示意图。
103.图16是本技术实施例提供的一种服务端的结构示意图。
104.图17是本技术实施例提供的一种智能车辆的结构示意图。
具体实施方式
105.下面将结合本技术实施例中的附图,对本技术实施例进行描述。
106.首先,对本技术中的部分专业用语进行解释说明,以便于本领域技术人员理解。
107.(1)空气悬挂。请参阅图1,图1是一种空气悬挂系统的结构示意图。如图1所示,车辆内的空气悬挂系统包括空气泵(或者为空气压缩机)、空气弹簧、减震器、控制单元和控制线路等等。其中,每个空气泵可以是独立的,空气泵的收缩和释放可以通过电信号控制。可选地,该空气悬挂系统还可以包括排气阀门、动态底盘控制单元以及多个传感器(图1中未示出)等等。其中,该多个传感器具体可以包括前后桥车身高度传感器、多个不同方向的车身加速度传感器以及多个空气弹簧伸张加速度传感器等等,此处不再进行赘述。
108.空气悬挂的基本技术方案主要包括内部装有压缩空气的空气弹簧和阻尼可变的减震器两部分。与传统钢制汽车悬挂系统相比较,空气悬挂具有很多优势,最重要的一点就是弹簧的弹性系数也就是弹簧的软硬能根据需要自动调节。例如,高速行驶时悬挂可以变硬,以提高车身稳定性,长时间低速行驶时,控制单元会认为正在经过颠簸路面,以悬挂变软来提高减震舒适性。
109.进一步地,车轮受到地面冲击产生的加速度也可以是空气弹簧自动调节时考虑的参数之一。例如高速过弯时,外侧车轮的空气弹簧和减震器就会自动变硬,以减小车身的侧倾,在紧急制动时电子模块也会对前轮的弹簧和减震器硬度进行加强以减小车身的惯性前倾。因此,装有空气弹簧的车型比其它汽车拥有更高的操控极限和舒适度。
110.进一步地,空气悬挂还可以将传统的底盘升降技术融入其中。例如,当车辆高速行驶时,车身高度自动降低,从而提高贴地性能确保良好的高速行驶稳定性同时降低风阻和油耗。当车辆慢速通过颠簸路面时,底盘自动升高,以提高通过性能。另外,空气悬挂系统还能自动保持车身水平高度,无论空载满载,车身高度都能恒定不变,这样在任何载荷情况下,悬挂系统的弹簧行程都保持一定,从而使减震特性基本不会受到影响。因此,即便是在车辆满载的情况下,车身也很容易控制。
111.然而,相较于传统悬挂(比如螺旋弹簧悬挂系统),由于空气式可调悬挂结构较为复杂,一般情况下其出现故障的几率和频率也会较高。请参阅图2a,图2a是本技术实施例提
供的一种空气悬挂系统故障率分析示意图。如图2a所示,空气悬挂系统的故障率往往会随着使用时间呈指数增长。进一步的,请参阅图2b,图2b是本技术实施例提供的一种空气悬挂系统故障原因分析示意图。如图2b所示,其中,分配阀体(也即上述的排气阀门)自身漏气以及橡胶老化均占引发空气悬挂系统故障原因的20%,其中,空气管路漏气和空气弹簧漏气均占引发空气悬挂系统故障原因的13%,等等。空气悬挂系统的故障极大程度上会危害驾驶安全,从而引发严重的交通事故,因此,如何更加全面、准确的对车辆内的空气悬挂系统进行实时监测,并及时给用户预警,对保证用户的驾驶安全就显得尤为重要。
112.(2)重要性采样,是方差缩减技术之一。重要性采样是一种针对稀有事件的降方差算法。以一种受控的方式引人偏置,增加稀有事件,减少运行时间。在系统设计时,通过一个相对简单分布函数的随机加权平均来近似计算目标分布函数的数学期望,并加上偏置函数从而使系统产生更多的判决错误,因而产生更多的重要事件。该相对简单的分布函数被称为重要性密度函数或偏置函数,权重值近似正比于这两种分布的似然比。通过修改重要性密度函数并引入重要性权值,可以大幅减少模拟样本数,从而在较短的运行时间内得到给定精确度的模拟结果。简而言之,重要性采样算法就是在有限的采样次数内,尽量让采样点覆盖对积分贡献很大的点。
113.首先,为了便于理解本技术实施例,进一步分析并提出本技术所具体要解决的技术问题。在现有技术中,关于空气悬挂系统的检测技术,包括多种技术方案,以下示例性的列举如下常用的一种方案。
114.请参阅图3,图3是一种汽车空气悬挂系统充气泵自动检测系统示意图。如图3所示,该充气泵自动检测系统可以包括直流电源模块,可编程逻辑控制器,模拟量采集模块以及气路泄漏检测模块,等等。其中,直流电源模块与可编程逻辑控制器电连接,可编程逻辑控制器与充气泵的直流电机通过直流控制器电连接,模拟量采集模块与可编程逻辑控制器电连接。如图3所示,气路泄漏检测模块包括平衡比较腔,稳压腔和流量测试仪,稳压腔与平衡比较腔、流量测试仪之间分别设有气路切换阀,稳压腔与充气泵的排气口之间设有气路切换阀。平衡比较腔、稳压腔和流量测试仪分别与模拟量采集模块电连接,模拟量采集模块与稳压腔、平衡比较腔之间分别设有压力传感器。其中,模拟量采集模块上连接有用于测量其电流值的电流传感器和/或用于测量其电压值的电压表。该充气泵自动检测系统的检测效率高,准确性好,可以避免人为误判和漏检的情况,有效提高空气悬挂系统充气泵的质量。
115.进一步地,该汽车空气悬挂系统充气泵自动检测系统还可以包括二维码生成器和打印设备,二维码生成器分别与可编程逻辑控制器以及打印设备电连接,通过直接生成二维码图形,可以将产品数据随产品永久保存,等等,此处不再进行赘述。
116.可选地,用户可以通过人机交互界面实现与可编程逻辑控制器的互动。其中,用户可以通过可编程逻辑控制器设定检测参数,也可以选择手动检测模式以对充气泵的个别项目进行检测,又或者选择自动检测模式,对该汽车空气悬挂系统充气泵自动检测系统提供的所有检测项目依次进行检测,等等,此处不再进行赘述。
117.该方案的缺点:如上所述,该方案所提供的汽车空气悬挂系统充气泵自动检测系统虽然可以通过设置相应的模块以及控制器对空气悬挂系统中的充气泵的现有状态进行较为准确、高效的检测。但是,对于结构复杂、组成部件繁多的空气悬挂系统而言,上述方案
仅仅涉及了对充气泵的检测,其检测范围狭隘,检测结果片面,不具备参考性。简而言之,上述方案无法全面、精准的对空气悬挂系统的整体状态进行检测、评估。
118.综上,上述方案无法利用现有通用的车辆硬件架构和空气悬挂系统等实现对空气悬挂系统高效、准确且全面的检测,从而无法保证在用户驾驶有空气悬挂系统的车辆时的驾驶安全。因此,为了解决当前空气悬挂系统检测技术中不满足实际业务需求的问题,本技术实施例实际要解决的技术问题包括如下方面:(1)基于车辆行驶过程中对空气悬挂系统采集到的大量数据,对车辆内的空气悬挂系统进行全面、精准的实时检测,避免因空气悬挂系统故障引发的交通事故,从而保证用户的驾驶安全,等等。(2)基于检测结果,进一步预估空气悬挂系统的使用情况,并且在紧急情况下(例如在检测到该空气悬挂系统磨损严重,并且预估到其安全的使用寿命所剩无几,极易发生故障的情况下)对车主进行预警,以提醒车主及时对空气悬挂系统进行维修或者更换,避免在行驶过程中空气悬挂系统发生故障从而引发的交通事故,从而有效保证驾驶安全。
119.请参见图4a,图4a是本技术实施例提供的一种智能车辆的功能框图。本技术实施例提供的一种检测方法可以应用于如图4a所示的智能车辆200中,在一个实施例中,智能车辆200可以配置为完全或部分地自动驾驶模式。在智能车辆200处于自动驾驶模式中时,可以将智能车辆200置为在没有和人交互的情况下操作。
120.智能车辆200可以包括各种子系统,例如空气悬挂系统201、行进系统202、传感系统204、控制系统206、一个或多个外围设备208以及电源210、计算机系统212和用户接口216。可选地,智能车辆200可包括更多或更少的子系统,并且每个子系统可包括多个元件。另外,智能车辆200的每个子系统和元件可以通过有线或者无线互连。
121.空气悬挂系统201可以包括在智能车辆200行驶过程中用于进行空气悬挂的各个组件。在一个实施例中,空气悬挂系统201可以包括空气弹簧、空气压缩机和减震器等等。可选地,在一个实施例中,空气悬挂系统201还可以包括相应的数据采集模块,可以在智能车辆200行驶过程中或者停车时对该空气悬挂系统201进行数据采集,例如采集空气压缩机每次调节时的空气压缩密度、压缩气体体积、释放气体体积,以及空气悬挂系统的使用时长等等。可选地,在一个实施例中,空气悬挂系统201还可以包括相应的通信模块,可以通过无线网络的方式与远程的服务端建立通信连接,继而将采集到的数据上传至服务端,以使得服务端可以通过本技术提供的一种检测方法基于该数据对智能车辆200内的空气悬挂系统201进行全面、精准的检测。进一步地,通过空气悬挂系统201内相应的通信模块还可以接收服务端发送的检测结果等等。从而可以保证在必要时(例如检测到空气悬挂系统201的磨损率已超过60%时),用户能够及时掌握该空气悬挂系统201的健康状态并对该空气悬挂系统201进行维修或者更换,保证驾驶安全。可选地,在一些可能的实施方式中,该空气悬挂系统201还可以设置在行进系统202中,等等,本技术实施例对此不作具体限定。
122.行进系统202可包括为智能车辆200提供动力运动的组件。在一个实施例中,行进系统202可包括引擎218、能量源219、传动装置220和车轮221。引擎218可以是内燃引擎、电动机、空气压缩引擎或者其他类型的引擎组合,例如汽油发动机和电动机组成的混动引擎,内燃引擎和空气压缩引擎组成的混动引擎。引擎218可以将能量源219转换成机械能量。
123.能量源219的示例包括汽油、柴油、其他基于石油的燃料、丙烷、其他基于压缩气体的燃料、乙醇、太阳能电池板、电池和其他电力来源。能量源219也可以为智能车辆200的其
他系统提供能量。
124.传动装置220可以将来自引擎218的机械动力传送到车轮221。传动装置220可包括变速箱、差速器和驱动轴。在一个实施例中,传动装置220还可以包括其他器件,比如离合器。其中,驱动轴可包括可耦合到一个或多个车轮221的一个或多个轴。
125.传感系统204可包括若干个传感器,该若干个传感器可以用于感测关于智能车辆200周边的环境(例如可以包括智能车辆200周围的地形、机动车辆、非机动车辆、行人、路障、交通标志、交通信号灯、动物、建筑和植物等等)的信息。如图4a所示,传感系统204可以包括定位系统222(定位系统可以是全球定位系统(global positioning system,gps)系统,也可以是北斗系统或者其他定位系统)、惯性测量单元(inertial measurement unit,imu)224、雷达226、激光测距仪228、相机230以及计算机视觉系统232等等。传感系统204还可以包括智能车辆200的内部系统的一个或多个传感器,例如,车内空气质量监测器、燃油量表、机油温度表等等。在一个实施例中,传感器系统204还可以包括用于对空气悬挂系统201进行数据采集的一个或多个传感器,例如采集空气弹簧内的空气压力或者上升温度等的传感器,等等,采集到的数据可以上传至服务端,以对该空气悬挂系统进行检测,保证驾驶安全。
126.定位系统222可用于估计智能车辆200的地理位置。imu 224用于基于惯性加速度来感测智能车辆200的位置和朝向变化。在一个实施例中,imu 224可以是加速度计和陀螺仪的组合。
127.雷达226可利用无线电信号来感测智能车辆200的周边环境内的物体。在一些实施例中,雷达226还可以用于感测智能车辆200周边车辆的速度和/或行进方向等等。
128.激光测距仪228可利用激光来感测智能车辆200所位于的环境中的物体。在一些实施例中,激光测距仪228可包括一个或多个激光源、一个或多个激光扫描器以及一个或多个检测器,以及其他系统组件。
129.相机230可用于捕捉智能车辆200的周边环境的多个图像。相机230可以是静态相机或者视频相机。
130.计算机视觉系统232可以操作来处理和分析由相机230捕捉的图像以便识别智能车辆200周边环境中的物体和/或特征。所述物体和/或特征可包括地形、机动车辆、非机动车辆、行人、建筑、交通信号、道路边界和障碍物等等。计算机视觉系统232可使用物体识别算法、运动中恢复结构(structure from motion,sfm)算法、视频跟踪和其他计算机视觉技术。在一些实施例中,计算机视觉系统232可以将识别得到的地形发送给空气悬挂系统201,空气悬挂系统201可以基于该地形向其内部组件下发相应的调控策略。例如,若识别得到智能车辆200当前行驶的地形为岩石地形,则空气悬挂系统201可以相应的调高智能车辆200的车辆底座,并增加阻尼,以提高驾驶舒适度,等等。
131.控制系统206为控制智能车辆200及其组件的操作。控制系统206可包括各种元件,其中包括油门234、制动单元236和转向系统240。
132.油门234用于控制引擎218的操作速度并进而控制智能车辆200的速度。
133.制动单元236用于控制智能车辆200减速。制动单元236可使用摩擦力来减慢车轮221。在其他实施例中,制动单元236可将车轮221的动能转换为电流。制动单元236也可采取其他形式来减慢车轮221转速从而控制智能车辆200的速度。
134.转向系统240可操作来调整智能车辆200的前进方向。
135.当然,在一个实例中,控制系统206可以增加或替换地包括除了所示出和描述的那些以外的组件。或者也可以减少一部分上述示出的组件。
136.智能车辆200通过外围设备208与外部传感器、其他车辆、其他计算机系统或用户之间进行交互。外围设备208可包括无线通信系统246、车载电脑248、麦克风250和/或扬声器252。在一些实施例中,也可以通过无线通信系统246将空气悬挂系统201的采集数据上传至服务端,还可以通过无线通信系统246向服务端请求查询空气悬挂系统201的检测结果并接收服务端发送的检测结果,等等,本技术实施例对此不作具体限定。
137.在一些实施例中,外围设备208提供智能车辆200的用户与用户接口216交互的手段。例如,车载电脑248可向智能车辆200的用户提供信息。用户接口216还可操作车载电脑248来接收用户的输入。车载电脑248可以通过触摸屏进行操作。在其他情况中,外围设备208可提供用于智能车辆200与位于车内的其它设备通信的手段。例如,麦克风250可从智能车辆200的用户接收音频(例如,语音命令或其他音频输入)。类似地,扬声器252可向智能车辆200的用户输出音频。
138.无线通信系统246可以直接地或者经由通信网络来与一个或多个设备无线通信。例如,无线通信系统246可使用第三代移动通信网络(3rd generation mobile networks,3g)蜂窝通信,例如码分多址(codedivisionmultipleaccess,cdma)、全球移动通讯系统(global system for mobile communications,gsm)/通用分组无线业务(general packet radio service,gprs),或者第四代移动通信网络(4th generation mobile networks,4g)蜂窝通信,例如长期演进技术(long term evolution,lte)。或者第三代移动通信网络(5th generation mobile networks,5g)蜂窝通信。无线通信系统246还可以利用无线保真技术(wireless-fidelity,wifi)与无线局域网(wireless local area network,wlan)通信。在一些实施例中,无线通信系统246可利用红外链路、蓝牙等与设备直接通信。其他无线协议,例如:各种车辆通信系统,例如,无线通信系统246可包括一个或多个专用短程通信(dedicated short range communications,dsrc)设备,这些设备可包括车辆和/或路边台站之间的公共和/或私有数据通信。
139.电源210可向智能车辆200的各种组件提供电力。在一个实施例中,电源210可以为可再充电锂离子或铅酸电池。这种电池的一个或多个电池组可被配置为电源为智能车辆200的各种组件提供电力。在一些实施例中,电源210和能量源219可一起实现,例如一些全电动车中那样。
140.智能车辆200的部分或所有功能受计算机系统212控制。计算机系统212可包括至少一个处理器213,处理器213执行存储在例如存储器214这样的非暂态计算机可读介质中的指令215。计算机系统212还可以是采用分布式方式控制智能车辆200的个体组件或子系统的多个计算设备。
141.处理器213可以是任何常规的处理器,诸如商业可获得的中央处理器(central processing unit,cpu)。可选地,该处理器可以是诸如特定应用集成电路(application-specific integrated circuit,asic)或其它基于硬件的处理器的专用设备。尽管图4a功能性地图示了处理器、存储器和在相同块中的计算机系统212的其它元件,但是本领域的普通技术人员应该理解该处理器或存储器实际上可以包括不存储在相同的物理外壳内的多
个处理器或存储器。例如,存储器可以是硬盘驱动器或位于不同于计算机系统212的外壳内的其它存储介质。因此,对处理器或存储器的引用将被理解为包括对可以或者可以不并行操作的处理器或存储器的集合的引用。不同于使用单一的处理器来执行此处所描述的步骤,例如传感系统204中的一些组件每个都可以具有其自己的处理器,所述处理器只执行与特定于组件的功能相关的计算。
142.在此处所描述的各个方面中,处理器213可以位于远离该车辆并且与该车辆进行无线通信。在其它方面中,此处所描述的过程中的一些在布置于车辆内的处理器上执行而其它则由远程处理器执行。
143.在一些实施例中,存储器214可包含指令215(例如,程序逻辑),指令215可被处理器213执行来执行智能车辆200的各种功能,包括以上描述的那些功能。存储器214也可包含额外的指令,包括空气悬挂系统201、向行进系统202、传感系统204、控制系统206和外围设备208中的一个或多个发送数据、从其接收数据、与其交互和/或对其进行控制的指令。
144.除了指令215以外,存储器214还可存储数据,例如空气悬挂系统201内各个组件的产品规格、产品型号(例如空气弹簧的产品型号为橡胶a-001等等)、空气悬挂系统201的使用时长、地形模型(比如冰面、雪地、沙地和岩石等地形模型)、以及不同地形模型各自对应的空气悬挂调控策略等等。在一些实施例中,存储器214还可存储例如道路地图、路线信息,车辆的位置、方向、速度以及其它这样的车辆数据,以及其他信息,等等。这种信息可在智能车辆200行驶期间被智能车辆200中的空气悬挂系统201或者计算机系统212使用。例如,可以根据当前行驶的路况等确定对应的地形模型,然后进一步确定空气悬挂系统201的调控策略,以获得更好的驾驶体验。
145.用户接口216,用于向智能车辆200的用户提供信息或从其接收信息。可选地,用户接口216可包括在外围设备208的集合内的一个或多个输入/输出设备,例如无线通信系统246、车车在电脑248、麦克风250和扬声器252。
146.可选地,上述这些组件中的一个或多个可与智能车辆200分开安装或关联。例如,存储器214可以部分或完全地与智能车辆200分开存在。上述组件可以按有线和/或无线方式来通信地耦合在一起。
147.综上所述,智能车辆200可以为轿车、卡车、摩托车、公共汽车、船、飞机、直升飞机、割草机、娱乐车、游乐场车辆、施工设备、电车、高尔夫球车、火车、和手推车,等等,本技术实施例对此不作具体限定。
148.可以理解的是,图4a中的智能车辆的功能框图只是本技术实施例中的一种示例性的实施方式,本技术实施例中的智能车辆包括但不仅限于以上结构。
149.请参见图4b,图4b是本技术实施例提供的一种空气悬挂系统的结构示意图。该空气悬挂系统10可以为上述图4a所示的智能车辆200内的空气悬挂系统201。如图4b所示,该空气悬挂系统10可以包括空气弹簧101、空气压缩机102、减震器103、数据采集模块104、通信模块105和控制模块106等等。其中,空气弹簧101、空气压缩机102和减震器103的具体功能可以参考上述专业用语解释中的描述,此处不再进行赘述。可以理解的是,数据采集单元104、通信单元105和控制单元106中的部分或全部也可以集成在一起,本技术实施例对此不作具体限定。
150.其中,控制模块106可以控制该空气悬挂系统10内的各个组件进行调节(例如控制
空气弹簧101、空气压缩机102和减震器103等进行调节)。
151.其中,数据采集模块104可以在该智能车辆的行驶过程中周期性的实时采集空气悬挂系统10的相应数据,例如采集空气压缩机102每次调节时的释放气体体积、压缩气体体积、空气压缩密度和上升温度等。还可以采集空气悬挂系统10的使用时长和调节频率等,其中,该调节频率可以为空气压缩机的调节频率,具体可以为阻尼调节频率等,本技术实施例对此不作具体限定。
152.通信模块105可以通过不限于2g、3g、4g、5g等各种无线通信方式进行通信,也可以是wifi、专用短程通信技术(dedicated short range communications,dsrc),或者长时间演进-车辆技术(long term evolution-vehicle,lte-v)等,也可以是通过数据线连接的有线通信模式,等等。通信模块105可以与远程的服务端建立通信连接,并且通信模块105可以接收上述数据采集模块104采集得到的原始数据,或者经数据采集模块104对原始传感器数据进行预处理后得到的数据,并将该数据上传至服务端。服务端可以基于该大量的采集数据对智能车辆200中的空气悬挂系统10进行全面、精准地检测。
153.可选地,该数据采集模块104还可以周期性的采集空气悬挂系统10的功率信号,并将采集到的功率信号发送至控制模块106。相应的,控制模块106可以接收该功率信号,并基于该功率信号计算相应的功率谱、功率谱密度、频谱密度以及单位时间内的高斯脉冲值统计等等。继而,控制模块106可以基于上述计算得到的功率谱、功率谱密度、频谱密度以及单位时间内的高斯脉冲值统计,以及预设的多个地形模型各自的模型参数,确定当前智能车辆200行驶过程中对应的地形。最终,控制模块106可以基于当前的地形下发相应的调控策略,保证在任意地形下驾驶的舒适度。可选地,该数据采集模块104也可以将采集到的功率信号发送至通信模块105,通信模块105可以将接收到的功率信号发送至服务端,进而由服务端基于该功率信号确定当前的地形,并将该地形反馈至智能车辆200(例如服务端可以将确定的地形发送至通信模块105,通信模块105再将该地形发送至控制模块106),最终实现不同地形下空气悬挂系统不同的调控策略,保证在任意地形下驾驶的舒适度。
154.可选地,在一些可能的实施例中,空气弹簧101、空气压缩机102和减震器103的内部还可以单独设置有各自的数据采集模块、通信模块和控制模块等,以实现相应功能,本技术实施例对此不作具体限定。
155.可以理解的是,图4b中的空气悬挂系统的结构只是本技术实施例中的一种示例性的实施方式,本技术实施例中的空气悬挂系统的结构包括但不仅限于以上结构。
156.为了便于理解本技术实施例,下面先对本技术实施例所基于的其中一种空气悬挂系统检测方法的系统架构进行描述。请参阅图5,图5是本技术实施例提供的一种检测方法的系统架构示意图。本技术实施例所提供的检测方法可以应用于如图5所示的系统架构或者类似的系统架构中。如图5所示,该系统架构可以包括服务端100和多个智能车辆,具体可以包括智能车辆200a、200b和200c等等。其中,该智能车辆200a、200b和200c可以为上述图4a对应实施例中所述的智能车辆200,可选地,如图5所示,该智能车辆200a、200b和200c中均可以内置相应的空气悬挂系统(例如可以为图4b对应实施例中的所述的空气悬挂系统10)。如图5所示,智能车辆200a、200b和200c可以通过无线网络(例如wifi、蓝牙和移动网络等)等方式与服务端建立通信连接。可选地,智能车辆200a、200b和200c之间也可以通过网络建立通信连接,本技术实施例对此不作具体限定。
157.下面,以服务端100和智能车辆200a为例,对本技术实施例提供的一种检测方法进行详细阐述。如图5所示,在用户驾驶智能车辆200a行驶过程中,车内的空气悬挂系统可以处于启动状态。当遇到不平整的路面时,空气悬挂系统会自动进行相应的调节,以对车身进行减震,保证用户的驾驶舒适性。在每次空气悬挂系统进行调节时,智能车辆200a可以针对空气悬挂系统内的各个方面进行数据采集,并将采集到的大量数据通过网络实时上传至服务端100。服务端100在接收到智能车辆200a上传的大量数据后,可以将接收到的大量数据输入至预先构建的检测模型中,继而得到该智能车辆200a内的空气悬挂系统的检测结果。可选地,通过该检测模型可以首先基于预设的多类数据特征(例如调节特征、材料特征和寿命特征等)将接收到的大量数据进行分类,得到多类特征各自对应的数据集合。然后,可以基于预设的评分标准计算每个数据集合对应的分数值,最终,可以基于该每个数据集合对应的分数值以及每类特征对应的权重,计算得到该智能车辆200a内的空气悬挂系统的检测结果(例如计算得到该空气悬挂系统的磨损率等)。进一步地,服务端100还可以基于该检测结果制定相应的维修建议,并将该维修建议以及相应的检测结果通过如图5所示的网络推送至智能车辆200a等等,使得用户可以及时掌握车内空气悬挂系统的健康状态,并及时进行维修。至此,服务器100完成了基于车辆实时采集并上传的大量数据,并综合考量不同类别的数据对空气悬挂系统的健康状况的影响程度,全面、准确地对空气悬挂系统进行检测。
158.可选地,如图5所示,服务端100还可以接收智能车辆200b和200c等其他多部车辆上传的数据,并基于上述的检测模型得到智能车辆200b和200c等其他多部车辆内的空气悬挂系统的检测结果。然后,服务端可以基于得到的大量检测结果,对该检测模型进行优化。例如,若计算得到的多个磨损率几乎相等,比如都在10%-12%的区间内,则可以对该检测模型内的一个或多个参数进行修正,具体可以为修正上述的评分标准和/或各类特征的权重中等等,从而使得检测结果更加准确。
159.可以理解的是,随着汽车电气化、智能化的发展,越来越多的车辆数据开始上云,云端(也即如图5所示的服务端)能够基于大数据分析对车辆的状态进行一个评估。本技术实施例可以利用车辆上传至云端的数据对车辆内的空气悬挂系统进行全面、准确的检测,并进一步可以给出准确的保养、维修建议,能够极大的减小因空气悬挂系统故障带来的交通事故,保障驾驶安全。
160.综上所述,本技术实施例中的智能车辆200a、200b和200c可以是具备上述功能的轿车、卡车、摩托车、公共汽车、船、飞机、直升飞机、割草机、娱乐车、游乐场车辆、施工设备、电车、高尔夫球车、火车和手推车,等等。可选地,智能车辆200a、200b和200c也可以是拥有辅助驾驶系统或者全自动驾驶系统的智能汽车(智能汽车集中运用了计算机、现代传感、信息融合、通讯、人工智能及自动控制等技术,是一个集环境感知、规划决策、多等级辅助驾驶等功能于一体的高新技术综合体),还可以是轮式移动机器人或者其他的机器设备等,本技术实施例对此不做具体限定。本技术实施例中的服务端100可以是具备上述功能的服务器或者服务器内的芯片,可以是一台服务器,也可以是由多台服务器组成的服务器集群,或者是一个云计算服务中心等等,可选地,服务端100还可以为用于对智能车辆200a、200b和200c等进行空气悬挂系统检测的相关应用等等,本技术实施例对此不作具体限定。可选地,该服务端100还可以是智能手机、平板电脑、笔记本电脑和台式电脑等终端设备,等等。
161.可以理解的是,上述图5所示的检测方法的系统架构只是本技术实施例中的一种
示例性的实施方式,本技术实施例中的检测方法的系统架构包括但不仅限于以上图5所示的系统架构。
162.为了便于理解本技术实施例,以下示例性列举本技术中一种检测方法所适用的应用场景。
163.请参阅图6a,图6a是本技术实施例提供的一种应用场景示意图。如图6a所示,该应用场景可以为沙地(或者称之为沙漠),包括智能车辆200和服务端100。其中,该智能车辆200中可以内置空气悬挂系统,包括用于空气悬挂的多个设备(例如空气弹簧、空气压缩机和减震器等等),可选地,该空气悬挂系统可以为图4b所示的空气悬挂系统10。如图6a所示,智能车辆200与服务端100之间可以通过网络建立通信连接。在智能车辆200行驶过程中或者停车时,智能车辆200可以对车内的空气悬挂系统进行数据采集,并将采集到的数据通过网络上传至服务端100。然后,服务端100可以通过本技术实施例提供的一种检测方法,基于上传的数据,对该智能车辆200内的空气悬挂系统进行检测,得到对应的检测结果。可选地,若用户想要了解当前空气悬挂系统的健康状态,则可以通过智能车辆200(例如可以通过运行于智能车辆200内的相关应用程序,或者设置于智能车辆200内的相关按钮等)向服务端100发送查询请求。然后,服务端100可以基于该查询请求将相应的检测结果发送至智能车辆200。可选地,用户还可以通过运行于智能手机上的相关应用程序等向服务端100发送查询请求,相应的,服务端100也可以将检测结果推送至智能手机。可选地,服务端100也可以主动将检测结果发送至智能车辆200,例如在检测到该空气悬挂系统磨损严重,已濒临使用寿命的情况下,服务端100可以立即将该检测结果发送至智能车辆200,并发送对应的维修建议以及安全警告等等,以提醒用户当前空气悬挂系统的危害程度较高,若继续使用极易发生故障,需要及时对该空气悬挂系统进行维修等,从而保证驾驶安全。
164.可选地,为了满足不同地形下的驾驶舒适性要求,可以预先对各个地形进行可解释建模,得到多个地形模型。可选地,服务端100和智能车辆200均可以维护该多个地形模型,也即均可以存储该多个地形模型。在智能车辆200行驶过程中,智能车辆200可以周期性的采集其空气悬挂系统的功率信号,并将该功率信号上传至服务端100,服务端100可以基于该功率信号,通过预先构建的算法模型(该算法模型例如可以包括基于功率信号进行功率谱计算、功率谱密度计算、单位时间内高斯脉冲值统计和频谱密度计算等)确定对应的地形模型(也即识别智能车辆200当前行驶的地形)。然后,服务端100可以将该地形模型发送至智能车辆200,智能车辆200在接收到该地形模型后,可以基于该地形模型向空气悬挂系统内的各个设备下发相应的调控策略,从而保证在不同地形下的驾驶舒适性和安全性。例如,如图6a所示,当前的地形为沙地地形,则智能车辆200可以根据该沙地地形向空气悬挂系统内的各个设备下发相应的调控策略,例如触发空气悬挂进行高频次的主动震动,从而防止智能车辆200陷入沙坑等。
165.请参阅图6b,图6b是本技术实施例提供的另一种应用场景示意图。如图6b所示,该应用场景可以为雪地公路,包括智能车辆200和服务端100,其中各部分的介绍可以参考上述图6a对应实施例中的相关描述,此处不再进行赘述。如图6b所示,当前的地形为雪地地形,则智能车辆可以根据该雪地地形向空气悬挂系统内的各个设备下发相应的调控策略,例如触发空气悬挂降低车辆底座高度,从而提升驾驶稳定性,保证在雪地等易滑路面上的驾驶安全。又例如,若当前为积雪较厚的路面,则还可以触发空气悬挂提升车辆底座高度,
从而防止智能车辆陷入雪坑,等等。
166.可选地,服务端100还可以对各个地形模型以及上述用于识别地形的算法模型进行迭代更新,不断优化,从而更好的保证在不同地形下的驾驶舒适性和安全性,满足用户需求。
167.需要说明的是,上述场景仅为示例性说明,本技术实施例提供的一种检测方法还可以应用于除上述例举的两个应用场景外的其他场景,等等,本技术实施例对此不作具体限定。
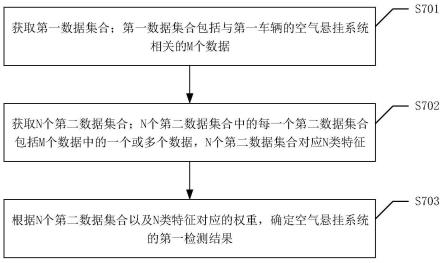
168.请参阅图7,图7是本技术实施例提供的一种检测方法的流程示意图,该方法可应用于上述图5中所述的检测方法的系统架构中,其中的第一车辆可以为上述图5中所述的系统架构中的智能车辆200a、200b和200c中的任意一个,其中的空气悬挂系统可以为上述图4b中所述的空气悬挂系统10,其中的服务端可以为上述图5所述的系统架构中的服务端100,可以用于支持并执行图7中所示的方法流程。下面将结合图7从服务端侧进行描述,该方法可以包括以下步骤s701-s703:
169.步骤s701:获取第一数据集合;第一数据集合包括与第一车辆的空气悬挂系统相关的m个数据。
170.具体地,服务端获取第一数据集合,该第一数据集合可以包括与第一车辆的空气悬挂系统相关的m个数据。该m个数据可以为第一车辆在行驶过程中或者在驻车状态下采集到的与空气悬挂系统有关的数据,m为大于或者等于1的整数。
171.可选地,该m个数据可以包括在空气悬挂系统进行调节时采集到的至少一次压缩气体体积、至少一次释放气体体积、至少一次上升温度、至少一次空气压缩密度等,还可以包括该空气悬挂系统的调节频率、使用时长、产品型号和产品规格中的多个,等等,本技术实施例对此不作具体限定。如此,大量不同类型的数据可以为后续的检测过程提供有效支撑,大大提高检测结果的全面性和准确定。
172.步骤s702:获取n个第二数据集合;n个第二数据集合中的每一个第二数据集合包括m个数据中的一个或多个数据,n个第二数据集合对应n类特征。
173.具体地,服务端在获取到该第一数据集合后,可以基于预设的n类特征,将该第一数据集合中的m个数据进行分类,得到n类特征对应的n个第二数据集合。显然,该n个第二数据集合中的每一个第二数据集合包括该m个数据中的一个或多个数据。可选地,该n类特征可以包括该空气悬挂系统的调节特征、寿命特征和材料特征中的一个或者多个,n为大于或者等于1的整数。
174.表1
[0175][0176]
其中,如上表1所示,该调节特征对应的第二数据集合中可以包括上述的至少一次压缩气体体积、至少一次释放气体体积、至少一次上升温度、至少一次空气压缩密度以及调节频率中的一个或多个;该寿命特征对应的第二数据集合中可以包括上述的空气悬挂系统的使用时长(例如为128小时、58天或者1年等等);该材料特征对应的第二数据集合中可以包括上述的产品型号和产品规格等等(例如为空气弹簧使用的材料为产品型号为a-001的橡胶,产品规格为b-001等)。
[0177]
步骤s703:根据n个第二数据集合以及n类特征对应的权重,确定空气悬挂系统的第一检测结果。
[0178]
具体地,服务端在分类得到该n个第二数据集合后,可以基于该n个第二数据集合以及n类特征各自的权重,计算得到空气悬挂系统的第一检测结果。可选地,该第一检测结果可以为该空气悬挂系统的磨损率等。例如,该调节特征的权重可以为40%,该材料特征的权重可以为30%,该寿命特征的权重可以为30%等等,也即可以认为调节特征(比如调节频率和上升温度等)对空气悬挂系统的质量或者说是健康状态的影响程度较重。又例如,该调节特征的权重可以为20%,该材料特征的权重可以为50%,该寿命特征的权重可以为30%等等,也即可以认为材料特征(比如产品型号和产品规格等)对空气悬挂系统的质量或者说是健康状态的影响程度较重,比如若是质量较差或者产品型号过旧,则该空气悬挂系统的磨损或者故障率可能较高,等等,此处不再进行赘述。
[0179]
采用本技术实施例可以将车辆在行驶过程中实时采集到的针对空气悬挂系统的大量数据上传至服务端,然后通过服务端在该大量数据的支撑下,基于数据的不同特征以及各类特征各自的权重(例如考虑到不同特征的数据对空气悬挂系统的使用状况的影响程度),建立更加精准有效的多维度检测体系,从而实现对空气悬挂系统更加全面、精准的实时检测,有效避免因为空气悬挂系统突发故障引起的交通事故,保证驾驶安全。
[0180]
请参阅图8,图8是本技术实施例提供的另一种检测方法的流程示意图,该方法可应用于上述图5中所述的检测方法的系统架构中,其中的第一车辆可以为上述图5中所述的系统架构中的智能车辆200a、200b和200c中的任意一个,其中的空气悬挂系统可以为上述图4b中所述的空气悬挂系统10,其中的服务端可以为上述图5所述的系统架构中的服务端100,可以用于支持并执行图8中所示的方法流程。下面将结合图8从服务端和第一车辆交互侧进行描述,该方法可以包括以下步骤s801-s809:
[0181]
步骤s801:获取数据流。
[0182]
具体地,为了保证检测结果的实时性,本技术实施例可以采用流式计算的方法,对数据流进行处理。其中,第一车辆可以在行驶或者停车时采集与空气悬挂系统相关的数据,从而得到对应的数据流。该数据流中可以包括k个数据。可选地,步骤s801可以参考上述图7对应实施例中的步骤s701,此处不再进行赘述。
[0183]
步骤s802:第一车辆发送数据流至服务端。
[0184]
具体地,第一车辆可以将行驶过程中针对空气悬挂系统持续采集数据得到的数据流实时上传至服务端。可选地,请一并参阅图9,图9是本技术实施例提供的一种检测方法的整体流程图。步骤s802可以参考图9中的步骤s11,如图9中的步骤s11所示,智能车辆(也即上述第一车辆)上报数据至服务端。
[0185]
步骤s803:服务端基于重要性采样方法,对数据流中包括的k个数据进行采样,获取第一数据集合;第一数据集合包括m个数据。
[0186]
具体地,服务端可以基于重要性采样方法,对数据流中包括的k个数据进行采样,获取第一数据集合,该第一数据集合包括m个数据。可以理解的是,该k个数据中包括该m个数据,k为大于或者等于m的整数。可选地,如上所述,为了减少服务端的计算量和运行成本以及提高检测效率,服务端可以基于第一车辆采集并上传的数据中的一部分进行空气悬挂系统的检测。
[0187]
请参阅图10,图10是本技术实施例提供的一种数据采样的示意图。可以理解的是,空气悬挂进行调节的时间点往往具有较强的随机性,在忙时调节频率较大(也即在忙时第一车辆采集并上传数据极为频繁),经常达到峰值。如图10所示,可以通过大数据分析构造,假设实际的调节分布概率函数为p(z),则该函数的峰值点即为该车辆动态调节空气悬挂的忙时,如此,服务端在对上传的数据流进行采样的过程中可以采用朴素贝叶斯模型进行权重的分类,例如图10中峰值所示的kq(z),从而使得服务端可以在空气悬挂调节的忙时(也即空气悬挂调节频率较高,继而第一车辆采集并上传数据较为频繁的时候)增加数据,而在空气悬挂调节的闲时,减少数据采样,从而得到该第一数据集合。其中,采样得到的该第一数据集合中包括的数据可以如图10中的表格所示,此处不再进行赘述。例如,若空气悬挂系统在第5分钟至第20分钟内调节频率较高,第一车辆采集并上传了有40个数据,则服务端可以采样其中的30个数据;若空气悬挂系统在第40分钟至第55分钟内调节频率极低,第一车辆采集并上传了只有5个数据,则服务端可以采样其中的3个数据。如此,可以通过重要性采样方法,在有限的采样时间或者采样数量内使得采样点的分布更符合实际情况,采样效率更高,为后续的检测过程提供大量有效的数据支撑。
[0188]
步骤s804:服务端基于预设的n类特征,将m个数据进行分类,得到n类特征对应的n个第二数据集合。
[0189]
具体地,步骤s804可以参考上述图7对应实施例中的步骤s702,此处不再进行赘述。可选地,开发人员可以事先在服务端基于支持向量机(support vector machine,svm)和神经网络(neural network,nn)等算法构建可解释的分类模型。如上所述,通过将m个数据输入该分类模型可以分析提取该m个数据中的每一个数据的特征,然后基于不同的特征将其进行分类,最终得到该n个第二数据集合,等等。如此,通过大数据进行特征分析,在相应特征上进行深度分析和整合,特征的背后有大量数据进行支撑,可以提高特征的可解释
性。
[0190]
步骤s805:服务端基于n个第二数据集合以及n类特征各自的权重,确定空气悬挂系统的第一检测结果。
[0191]
具体地,步骤s805可以参考上述图7对应实施例中的步骤s703,此处不再进行赘述。
[0192]
可选地,步骤s805还可以参考图9中的步骤s12,如图9所示,开发人员可以事先在服务端构建一个计算模型,通过该计算模型可以基于预设的评分标准以及各个特征对应的第二数据集合,计算得到该调节特征对应的分数值为a1(例如满分为10分,则该a1可以为5分,一般情况下,分数值越高可以代表空气悬挂系统的受损越严重),该材料特征对应的分数值为a2,该寿命特征对应的分数值为a3。进一步地,如图9所示,该调节特征的权重为p1,材料特征的权重为p2,该寿命特征的权重为p3,则可以计算得到该空气悬挂系统的磨损率(也即第一检测结果)为a1*p1 a2*p2 a3*p3。
[0193]
综上所述,为实现本技术实施例提供的一种检测方法,开发人员可以事先在服务端构建一个检测模型,该检测模型例如可以包括上述的分类模型和计算模型等,可以实现上述的数据分类以及按照不同权重计算得到第一检测结果等功能。如此,服务端可以通过将车辆实时上传的采集数据输入至该检测模型,从而高效、准确地得到该空气悬挂系统的第一检测结果,实现对空气悬挂系统状态的实时监控,极大程度上降低因空气悬挂系统故障造成的事故发生率。
[0194]
可选地,服务端可以基于预设的周期(例如为1小时或者30分钟等)以及第一车辆不断采集并上传的数据,通过上述计算方法对该空气悬挂系统进行周期性的检测,并周期性地更新检测结果等,从而保证检测结果的实时性和有效性。
[0195]
可选地,服务端还可以获取第三数据集合,该第三数据集合可以包括与多个第二车辆各自的空气悬挂系统相关的p个数据,该p个数据例如可以为该多个第二车辆在行驶或者停车时针对该多个第二车辆内各自的空气悬挂系统采集的数据,等等,其中p可以为大于1的整数。然后,服务端可以基于该第三数据集合,并通过上述的第一检测结果的计算方法,得到该多个第二车辆各自的第一检测结果。其次,服务端可以基于该多个第二车辆各自的第一检测结果和第一车辆的第一检测结果,将其进行分析比对。例如,可以将计算得到的大量车辆各自的磨损率进行分析比对,检查其是否符合磨损率实际的分布情况,显然,若计算得到的大量磨损率均分布在同一区间,比如均为10%左右,则可以认为目前的检测过程存在问题,具体可以为上述涉及的分类模型、评分标准或者权重的分配存在问题,还不完善。从而,可以基于大数据的支撑(也即大量车辆各自的磨损率),进一步对上述检测过程中的分类模型和/或评分标准和/或该n类特征各自的权重进行修正,从而使得检测结果更加准确,更加有效地避免因检测结果不准确,从而导致用户未及时正确的掌握空气悬挂系统的状况,继而引发交通事故的危险情况。可选地,如上所述,由于第一车辆的检测结果可以基于不断上传的数据进行周期性的更新,则服务端还可以基于第一车辆不同时间得到的检测结果,对上述检测过程中的分类模型和/或评分标准和/或该n类特征各自的权重进行修正。例如,若服务端针对该第一车辆上午9点检测得到的磨损率为30%,上午10点得到检测得到的磨损率为50%,上午11点检测得到的磨损率为10%,则基于如此不符合实时情况的磨损率变化,可以确定目前的检测过程存在问题,开发人员可以进一步对该检测过程进行优化,
等等,此处不再进行赘述。
[0196]
步骤s806:服务端基于空气悬挂系统的第一检测结果,确定空气悬挂系统的第二检测结果
[0197]
具体地,服务端可以基于计算得到的第一检测结果,进一步计算该空气悬挂系统的第二检测结果。例如,服务端可以基于该空气悬挂系统的磨损率进一步评估或者预测该空气悬挂系统的故障易发率和可使用时长(或者评估其使用时长是否在安全时长范围内等等)等等,本技术实施例对此不作具体限定。可选地,该第二检测结果还可以包括评估该空气悬挂系统是否需要进行维修等等。可选地,计算得到的第一检测结果和第二检测结果可以存储至服务端,并且可以携带有相应的唯一标识,用于记录该第一检测结果和第二检测结果对应于第一车辆,等等,本技术实施例对此不作具体限定。
[0198]
步骤s807:第一车辆向服务端发送查询请求。
[0199]
具体地,若用户想要了解该第一车辆内空气悬挂系统的健康状态时,可以通过该第一车辆向服务端发送查询请求。可选地,步骤s807还可以参考图9中的步骤s13a。
[0200]
步骤s808:服务端向第一车辆发送第一检测结果和第二检测结果。
[0201]
具体地,服务端在接收到第一车辆发送的查询请求后,可以基于该查询请求确定与该第一车辆对应的第一检测结果和第二检测结果,并将该第一检测结果和第二检测结果发送至第一车辆。可选地,该服务端也可以基于用户的实际需求只发送第一检测结果或者只发送第二检测结果,等等,本技术实施例对此不作具体限定。可选地,步骤s808还可以参考图9中的步骤s13b。
[0202]
步骤s809:若第一检测结果和/或第二检测结果满足预设条件,服务端向第一车辆发送第一检测结果和第二检测结果
[0203]
具体地,若第一检测结果和/或第二检测结果满足预设条件,服务端还可以主动向第一车辆发送第一检测结果和第二检测结果。可选地,步骤s809可以参考图9中的步骤s14。可选地,例如在检测得到该空气悬挂系统的磨损率大于第一阈值(例如为40%)和/或故障易发率大于第二阈值(例如为50%)和/或可使用时长小于第三阈值(例如为12小时)的情况下,也即在该空气悬挂系统磨损严重,极易发生故障,不适宜再继续使用的情况下,为了保证用户的驾驶安全,服务端可以立即向该第一车辆发送其对应的第一检测结果、第二检测结果和警告信息等。可选地,第一车辆在接收到该警告信息后可以通过中央显示屏、仪表盘或者语音警告的方式提醒用户,以使得用户可以及时对该空气悬挂系统进行维修,避免交通事故。
[0204]
可选地,若第一检测结果和/或第二检测结果满足预设条件,该服务端还可以进一步制定相应的维修方案以及获取该第一车辆预设范围内的至少一个汽车维修店的信息,并将该维修方案以及至少一个汽车维修店的信息推送至该第一车辆,以便用户可以及时对该空气悬挂系统进行准确、高效地维修,保证驾驶安全。其中,该信息可以包括该至少一个汽车维修店各自的名称、地址、与该第一车辆之间的距离、收费价格、用户评价和驾驶路径规划等等,本技术实施例对此不作具体限定。
[0205]
可选地,为了保证在不同地形下的驾驶舒适性和安全性,本技术实施例中的服务端还可以确定第一车辆当前行驶过程中对应的目标地形,并将该目标地形发送至第一车辆。以使得该第一车辆可以基于该目标地形获取该目标地形下最优的空气悬挂模式并下发
相应的调控策略,以适应不同的地形驾驶需求,并且还可以减少极端地形对空气悬挂系统的磨损,延长空气悬挂系统的使用寿命。可选地,该目标地形可以为沙地、雪地、岩石和冰面中的任意一种,该调控策略可以包括针对所述空气悬挂系统对应的高度参数、震动参数和阻尼参数中的至少一种参数的调控策略。
[0206]
可选地,请参阅图11,图11是本技术实施例提供的一种地形识别的流程示意图。如图11所示,开发人员可以预先在云端(也即上述服务端)利用最小二乘法对不同地形下的特征进行拟合,进行解释性驾驶描述,从而对各个地形进行可解释建模,得到多个地形模型。可选地,如图11所示,在第一车辆行驶过程中,第一车辆可以周期性的采集其空气悬挂系统的功率信号(例如图11所示的载波包络相位(carrier envelope phase,cep)示意图),并将该功率信号上传至云端,云端可以基于该功率信号,通过预先构建的算法模型(如图11所示,该算法模型可以为“r
in
=model(模型)(功率谱(power spectral,ps),功率谱密度(power spectral density,psd),gauss plus(高斯脉冲),frequency density(频谱密度))”,可以包括基于功率信号进行功率谱计算、功率谱密度计算、单位时间内高斯脉冲值统计和频谱密度计算等)确定当前行驶状况下对应的地形模型。然后,云端可以将该地形模型发送至第一车辆,该第一车辆在接收到该地形模型后,可以在本地进行地形模型的维护,基于该地形模型制定相应的调控策略,并向空气悬挂系统内的各个设备下发相应的调控策略,从而保证在不同地形下空气悬挂系统内各个设备的实时动态调节,进而保证驾驶舒适性和安全性。可选地,如图11所示,云端还可以对该算法模型进行迭代更新,以提高地形识别的准确率和效率,可选地,云端还可以对各个地形模型进行优化,等等。
[0207]
可选地,在车辆未与云端建立通信连接的情况下(也即车辆未联网的情况下),车辆也也可以基于自身采集到的功率信号、车辆本地维护的算法模型以及各个地形模型进行地形识别,并根据识别得到的地形向空气悬挂系统内的多个设备下发相应的调控策略,等等。可选地,该车辆还可以包括一个或多个传感器(例如雷达和相机等),并且该车辆可以通过该一个或多个传感器进行地形识别,例如可以通过相机采集到的图像分析当前的地形等等,本技术实施例对此不作具体限定。可选地,请参考下述表2。
[0208]
表2
[0209]
地形高度(毫米)震动(次/秒)阻尼(牛顿/(米/秒))沙地a1b1c1雪地a2不调节c2岩石a3b3c3冰面a4不调节c4
[0210]
如上表2所示,该调控策略主要可以包括针对高度、震动和阻尼三个参数不同策略级别的调控。空气悬挂系统内的相应设备在接收到该各个参数的调控策略后,可以进行相应的调节。下面,针对各个参数的调控策略进行详细阐述:
[0211]
高度(毫米):该高度为车辆(具体可以为车辆底座)距离地面的实际距离,一般情况下,车型大小不同,其与地面的距离也不同,但通常范围为:430mm-460mm,可调节范围区间为:-25mm~ 25mm。空气悬挂系统内相应的电子元件可以根据不同地形下发的高参数进行调节。例如,在岩石等不平整的地形下,该高度参数的调控策略可以为 25mm,以尽可能的提升车辆与地面的距离,从而避免车辆底座被岩石划伤或者卡住,等等。如此,表2中的a3可
以大于a1、a2和a4。
[0212]
震动(次/秒):全称可以为震动频率,即每秒主动触发空气悬挂进行震动的次数。该震动的触发地形可以为沙漠、岩石等地形。当识别到当前地形为沙地或者岩石时,第一车辆可以下发指令以触发空气悬挂进行主动震动,从而防止车子陷入沙坑、泥石路面,保证驾驶安全。可选地,基于不同地形制定的震动频率和/或震动幅度都可以不同,本技术实施例对此不作具体限定。如上表2所示,在雪地和冰面等较为平稳的地形中,可以不进行震动调节,也即不触发空气悬挂进行主动震动。
[0213]
阻尼(牛顿/(米/秒)):单位速度力的值。一般情况下,为了达到不同的阻尼,需要向空气悬挂系统的空气弹簧内填充不同体积的空气,例如,在岩石或者山地等不平稳的地形中行驶时,往往需要填充更大体积的空气,以增大阻尼,维持驾驶的平稳。然而阻尼的调节往往由于空气悬挂中设备材料(也即空气弹簧所使用的材料)等的不同存在一定的差异。因此,本技术实施例也可以基于不同的设备材料,在进行阻尼的测量后,进行标准化统一。可选地,请参阅图12a,图12a是本技术实施例提供的一种阻尼调节的示意图。如图12a所示,在一些可能的实施例中,可以通过对回弹阻尼和压缩阻尼分别进行拟合,从而获得最佳的阻尼调节策略,以更好地适应不同的地形。可选地,请参阅图12b,图12b是本技术实施例提供的另一种阻尼调节的示意图。如图12b所示,其中的虚线为不进行阻尼调节情况下(也即真实驾驶情况下)的温度/压力的拟合曲线,其中的每个圆点为进行阻尼调节后测量得到的温度/压力,其中的实线为将该进行阻尼调节后测量得到的多个温度/压力进行拟合后的拟合曲线。可以理解的是,一般情况下,温度/压力越高往往代表阻尼越大,如图12b所示,位于虚线上面的直线部分可以代表增加阻尼的情况,而位于虚线下面的直线部分可以代表减少阻尼的情况。可选地,还可以将压力、温度以及材料对阻尼的影响进行综合分析,获得每次脉冲调节(也即每次向空气弹簧内填充气体进行阻尼调节)的粒度值(例如pulse(脉冲)=model(模型)(temperature(温度),pressure(压力),material(材料))等,从而获取更好的阻尼调节策略以适应不同的地形,等等,本技术实施例对此不作具体限定。
[0214]
可选地,除上述地形识别主动触发进行阻尼调节外,用户也可以基于自身的驾驶需求进行手动阻尼调节,例如,若用户想要获得更加强烈刺激的驾驶体验,则可以手动操作减少阻尼,又例如,若用户想要获得平稳的驾驶体验,则可以手动操作增加阻尼。相应的,除上述手动调节阻尼的方式外,用户也可以根据自身需求,手动切换地形模式,例如可以在岩石地形行驶过程中选择默认的公路地形模式,从而减少空气悬挂的阻尼,以增强驾驶的真实体验感和操控感,等等。
[0215]
请参阅图13,图13是本技术实施例提供的另一种检测方法的整体流程图。如图13所示,综上所述,本技术实施例是通过车端(也即上述的第一车辆)以及云端(也即上述的服务端)的交互进行完成。其中,在车端进行空气悬挂系统使用数据的采集和上报,在云端进行数据特征的提取、模型的分析。其中,如图13所示,服务端可以采取大数据分析技术对于空气悬挂系统的健康状态和地形模型这两方面进行重点的分析。如图13所示,车端主要可以通过主动查询和云端主动推送两种途径接收云端发送的健康状态信息,以对健康状态信息进行同步,同步后可以推送给车主以及提供相应的查询功能等。对于地形选择(或者说地形识别)功能而言,车端可以与云端进行地形模型的同步,再在车端基于当前的地形模型进行指令下发,以对空气悬挂进行适应性调节。如此,本技术实施例可以基于大数据分析有效
对空气悬挂系统的状态进行实时监控,降低因空气悬挂系统故障引发的事故率。进一步的,本技术实施例还可以基于地形识别和智能调节带来更好的驾驶体验和乘坐体验,还可以延长空气悬挂系统的使用寿命,等等。可以理解的是,在空气悬挂进行电子化的过程中,数据为其赋予了智能,而通过本技术实施例能够更好地发挥数据价值。
[0216]
请参阅图14,图14是本技术实施例提供的一种检测装置的结构示意图,该检测装置30可以应用于上述服务端,如图14所示,该检测装置装置30可以包括第一获取单元301、第二获取单元302、第一确定单元303,其中,各个单元的详细描述如下。
[0217]
第一获取单元301,用于获取第一数据集合;所述第一数据集合包括与第一车辆的空气悬挂系统相关的m个数据;m为大于或者等于1的整数;
[0218]
第二获取单元302,用于获取n个第二数据集合;所述n个第二数据集合中的每一个第二数据集合包括所述m个数据中的一个或多个数据;所述n个第二数据集合对应n类特征,所述n类特征包括所述空气悬挂系统的调节特征、寿命特征和材料特征中的一个或多个;n为大于或者等于1的整数;
[0219]
第一确定单元303,用于根据所述n个第二数据集合以及所述n类特征对应的权重,确定所述空气悬挂系统的第一检测结果。
[0220]
在一种可能的实现方式中,该装置30还包括:
[0221]
第二确定单元304,用于基于所述空气悬挂系统的所述第一检测结果,确定所述空气悬挂系统的第二检测结果;所述第一检测结果包括所述空气悬挂系统的磨损率;所述第二检测结果包括所述空气悬挂系统的故障易发率和所述空气悬挂系统的可使用时长。
[0222]
在一种可能的实现方式中,所述第一获取单元301,具体用于:
[0223]
接收来自所述第一车辆的数据流;所述数据流包括与所述空气悬挂系统相关的k个数据;
[0224]
基于重要性采样装置对所述数据流包括的所述k个数据进行采样,获取所述第一数据集合;所述k个数据中包括所述m个数据;k为大于或者等于m的整数。
[0225]
在一种可能的实现方式中,该装置30还包括:
[0226]
接收单元305,用于接收所述第一车辆发送的查询请求;
[0227]
第一发送单元306,用于基于所述查询请求,向所述第一车辆发送所述空气悬挂系统的所述第一检测结果和所述第二检测结果。
[0228]
在一种可能的实现方式中,该装置30还包括:
[0229]
第二发送单元307,用于确定所述第一车辆在行驶过程中对应的目标地形,并将所述目标地形发送至所述第一车辆;所述目标地形用于所述第一车辆根据所述目标地形对所述空气悬挂系统下发对应的调控策略;所述目标地形为沙地、雪地、岩石和冰面中的一种;所述调控策略包括针对所述空气悬挂系统对应的高度参数、震动参数和阻尼参数中的至少一种参数的调控策略。
[0230]
在一种可能的实现方式中,该装置30还包括:
[0231]
第三发送单元308,用于若所述第一检测结果和/或所述第二检测结果满足预设条件,则向所述第一车辆发送所述第一检测结果、所述第二检测结果以及相应的警告信息;所述警告信息用于警告用户对所述空气悬挂系统进行维修;其中,所述预设条件包括所述空气悬挂系统的所述磨损率大于第一阈值和/或所述空气悬挂系统的所述故障易发率大于第
二阈值和/或所述空气悬挂系统的所述可使用时长小于第三阈值。
[0232]
在一种可能的实现方式中,该装置30还包括:
[0233]
第四发送单元309,用于若所述第一检测结果和/或所述第二检测结果满足所述预设条件,则获取在所述第一车辆的预设范围内的至少一个汽车维修店的信息,并向所述第一车辆发送所述至少一个汽车维修店的信息;所述信息包括所述至少一个汽车维修店各自的地址、与所述第一车辆之间的距离、收费价格、用户评价和驾驶路径规划中的至少一种。
[0234]
在一种可能的实现方式中,所述第一确定单元303,具体用于:
[0235]
基于所述n个第二数据集合以及预设的评分标准,分别计算得到所述n类特征各自对应的分数值;
[0236]
基于所述n类特征各自对应的分数值,以及所述n类特征各自的权重,计算得到所述空气悬挂系统的所述第一检测结果。
[0237]
在一种可能的实现方式中,该装置30还包括:
[0238]
第三获取单元310,用于获取第三数据集合,所述第三数据集合包括与多个第二车辆各自的空气悬挂系统相关的p个数据;p为大于1的整数;
[0239]
第三确定单元311,用于基于所述第三数据集合,确定所述多个第二车辆各自的第一检测结果;
[0240]
修正单元312,用于基于所述多个第二车辆各自的所述第一检测结果和所述第一车辆的所述第一检测结果,对所述评分标准和/或所述n类特征各自的权重进行修正。
[0241]
在一种可能的实现方式中,所述m个数据包括与所述空气悬挂系统相关的至少一次压缩气体体积、至少一次释放气体体积、至少一次上升温度、至少一次空气压缩密度、以及所述空气悬挂系统的调节频率、使用时长、产品型号和产品规格中的多个;其中,所述调节特征对应的第二数据集合中包括所述至少一次压缩气体体积、所述至少一次释放气体体积、所述至少一次上升温度、所述至少一次空气压缩密度以及所述调节频率中的一个或多个;所述寿命特征对应的所述第二数据集合中包括所述使用时长;所述材料特征对应的所述第二数据集合中包括所述产品型号和所述产品规格中的一个或多个。
[0242]
在一种可能的实现方式中,所述第二获取单元302,具体用于:
[0243]
基于所述n类特征,将所述m个数据进行分类,得到所述n类特征对应的n个第二数据集合。
[0244]
需要说明的是,本技术实施例中所描述的检测装置中各功能单元的功能可参见上述图7中所述的方法实施例中步骤s701-步骤s703的相关描述,还可以参见上述图8中所述的方法实施例中的步骤s801-步骤s809的相关描述,此处不再进行赘述。
[0245]
图14中每个单元可以以软件、硬件、或其结合实现。以硬件实现的单元可以包括路及电炉、算法电路或模拟电路等。以软件实现的单元可以包括程序指令,被视为是一种软件产品,被存储于存储器中,并可以被处理器运行以实现相关功能,具体参见之前的介绍。
[0246]
请参阅图15,图15是本技术实施例提供的一种检测装置的结构示意图,该检测装置40可以应用于上述第一车辆,如图15所示,该检测装置40可以包括获取单元401,其中,各个单元的详细描述如下。
[0247]
获取单元401,用于获取数据流,并发送所述数据流至服务端;所述数据流包括与第一车辆的空气悬挂系统相关的k个数据;所述数据流用于所述服务端基于重要性采样方
法对所述数据流包括的所述k个数据进行采样,获取对应的第一数据集合;所述第一数据集合包括与第一车辆的所述空气悬挂系统相关的m个数据;所述k个数据中包括所述m个数据;所述m个数据用于所述服务端获取n个第二数据集合;所述n个第二数据集合中的每一个第二数据集合包括所述m个数据中的一个或多个数据;所述n个第二数据集合对应n类特征,所述n类特征包括所述空气悬挂系统的调节特征、寿命特征和材料特征中的一个或多个;所述n个第二数据集合用于所述服务端基于所述n个第二数据集合以及所述n类特征对应的权重,确定所述空气悬挂系统的第一检测结果;m、n为大于或者等于1的整数,k为大于或者等于m的整数。
[0248]
在一种可能的实现方式中,所述第一检测结果用于所述服务端基于所述第一检测结果,确定所述空气悬挂系统的第二检测结果;所述第一检测结果包括所述空气悬挂系统的磨损率;所述第二检测结果包括所述空气悬挂系统的故障易发率和所述空气悬挂系统的可使用时长。
[0249]
在一种可能的实现方式中,该装置40还包括:
[0250]
发送单元402,用于向所述服务端发送查询请求;
[0251]
第一接收单元403,用于接收所述服务端基于所述查询请求发送的所述空气悬挂系统的所述第一检测结果和所述第二检测结果。
[0252]
在一种可能的实现方式中,该装置40还包括:
[0253]
第二接收单元406,用于接收所述服务端发送的目标地形,并根据所述目标地形对所述空气悬挂系统下发对应的调控策略;所述目标地形为所述服务端确定的所述第一车辆在行驶过程中对应的地形;所述目标地形为沙地、雪地、岩石和冰面中的一种;所述调控策略包括针对所述空气悬挂系统对应的高度参数、震动参数和阻尼参数中的至少一种参数的调控策略。
[0254]
在一种可能的实现方式中,该装置40还包括:
[0255]
第三接收单元404,用于若所述第一检测结果和/或所述第二检测结果满足预设条件,则接收所述服务端发送的所述第一检测结果、所述第二检测结果以及相应的警告信息;所述警告信息用于警告用户对所述空气悬挂系统进行维修;其中,所述预设条件包括所述空气悬挂系统的所述磨损率大于第一阈值和/或所述空气悬挂系统的所述故障易发率大于第二阈值和/或所述空气悬挂系统的所述可使用时长小于第三阈值。
[0256]
在一种可能的实现方式中,该装置40还包括:
[0257]
第四接收单元405,用于若所述第一检测结果和/或所述第二检测结果满足预设条件,则接收所述服务端发送的在所述第一车辆的预设范围内的至少一个汽车维修店的信息;所述信息包括所述至少一个汽车维修店各自的地址、与所述第一车辆之间的距离、收费价格、用户评价和驾驶路径规划中的至少一种。
[0258]
在一种可能的实现方式中,所述m个数据包括与所述空气悬挂系统相关的至少一次压缩气体体积、至少一次释放气体体积、至少一次上升温度、至少一次空气压缩密度、以及所述空气悬挂系统的调节频率、使用时长、产品型号和产品规格中的多个;其中,所述调节特征对应的第二数据集合中包括所述至少一次压缩气体体积、所述至少一次释放气体体积、所述至少一次上升温度、所述至少一次空气压缩密度以及所述调节频率中的一个或多个;所述寿命特征对应的所述第二数据集合中包括所述使用时长;所述材料特征对应的所
述第二数据集合中包括所述产品型号和所述产品规格中的一个或多个。
[0259]
需要说明的是,本技术实施例中所描述的检测装置中各功能单元的功能可参见上述图7中所述的方法实施例中步骤s701-步骤s703的相关描述,还可以参见上述图8中所述的方法实施例中的步骤s801-步骤s809的相关描述,此处不再进行赘述。
[0260]
图15中每个单元可以以软件、硬件、或其结合实现。以硬件实现的单元可以包括路及电炉、算法电路或模拟电路等。以软件实现的单元可以包括程序指令,被视为是一种软件产品,被存储于存储器中,并可以被处理器运行以实现相关功能,具体参见之前的介绍。
[0261]
基于上述方法实施例以及装置实施例的描述,本技术实施例还提供一种服务端。请参阅图16,图16是本技术实施例提供的一种服务端的结构示意图,该服务端至少包括处理器1001,输入设备1002、输出设备1003和计算机可读存储介质1004,该服务端还可以包括其他通用部件,在此不再详述。其中,服务端内的处理器1001,输入设备1002、输出设备1003和计算机可读存储介质1004可通过总线或其他方式连接。
[0262]
处理器1001可以是通用中央处理器(cpu),微处理器,特定应用集成电路(application-specific integrated circuit,asic),或一个或多个用于控制以上方案程序执行的集成电路。
[0263]
该服务端内的存储器可以是只读存储器(read-only memory,rom)或可存储静态信息和指令的其他类型的静态存储设备,随机存取存储器(random access memory,ram)或者可存储信息和指令的其他类型的动态存储设备,也可以是电可擦可编程只读存储器(electrically erasable programmable read-only memory,eeprom)、只读光盘(compact disc read-only memory,cd-rom)或其他光盘存储、光碟存储(包括压缩光碟、激光碟、光碟、数字通用光碟、蓝光光碟等)、磁盘存储介质或者其他磁存储设备、或者能够用于携带或存储具有指令或数据结构形式的期望的程序代码并能够由计算机存取的任何其他介质,但不限于此。存储器可以是独立存在,通过总线与处理器相连接。存储器也可以和处理器集成在一起。
[0264]
计算机可读存储介质1004可以存储在服务端的存储器中,所述计算机可读存储介质1004用于存储计算机程序,所述计算机程序包括程序指令,所述处理器1001用于执行所述计算机可读存储介质1004存储的程序指令。处理器1001(或称cpu(central processing unit,中央处理器))是服务端的计算核心以及控制核心,其适于实现一条或一条以上指令,具体适于加载并执行一条或一条以上指令从而实现相应方法流程或相应功能;在一个实施例中,本技术实施例所述的处理器1001可以用于进行空气悬挂系统检测的一系列处理,包括:获取第一数据集合;所述第一数据集合包括与第一车辆的空气悬挂系统相关的m个数据;m为大于或者等于1的整数;获取n个第二数据集合;所述n个第二数据集合中的每一个第二数据集合包括所述m个数据中的一个或多个数据;所述n个第二数据集合对应n类特征,所述n类特征包括所述空气悬挂系统的调节特征、寿命特征和材料特征中的一个或多个;n为大于或者等于1的整数;根据所述n个第二数据集合以及所述n类特征对应的权重,确定所述空气悬挂系统的第一检测结果,等等。
[0265]
需要说明的是,本技术实施例中所描述的服务端中各功能单元的功能可参见上述图7中所述的方法实施例中的步骤s701-步骤s703的相关描述,还可以参见上述图8中所述的方法实施例中的步骤s801-步骤s809的相关描述,此处不再赘述。
[0266]
在上述实施例中,对各个实施例的描述都各有侧重,某个实施例中没有详述的部分,可以参见其他实施例的相关描述。
[0267]
本技术实施例还提供了一种计算机可读存储介质(memory),所述计算机可读存储介质是服务端中的记忆设备,用于存放程序和数据。可以理解的是,此处的计算机可读存储介质既可以包括服务端中的内置存储介质,当然也可以包括服务端所支持的扩展存储介质。计算机可读存储介质提供存储空间,该存储空间存储了服务端的操作系统。并且,在该存储空间中还存放了适于被处理器1001加载并执行的一条或一条以上的指令,这些指令可以是一个或一个以上的计算机程序(包括程序代码)。需要说明的是,此处的计算机可读存储介质可以是高速ram存储器,也可以是非不稳定的存储器(non-volatile memory),例如至少一个磁盘存储器;可选地还可以是至少一个位于远离前述处理器的计算机可读存储介质。
[0268]
本技术实施例还提供一种计算机程序,该计算机程序包括指令,当该计算机程序被计算机执行时,使得计算机可以执行任意一种检测方法的部分或全部步骤。
[0269]
在上述实施例中,对各个实施例的描述都各有侧重,某个实施例中没有详述的部分,可以参见其它实施例的相关描述。
[0270]
基于上述方法实施例以及装置实施例的描述,本技术实施例还提供一种智能车辆。请参阅图17,图17是本技术实施例提供的一种智能车辆的结构示意图,该智能车辆可以为上述第一车辆,可以包括空气悬挂系统。如图17所示,该智能车辆至少包括处理器1101,输入设备1102、输出设备1103和计算机可读存储介质1104,该智能车辆还可以包括其他通用部件,在此不再详述。其中,智能车辆内的处理器1101,输入设备1102、输出设备1103和计算机可读存储介质1104可通过总线或其他方式连接。
[0271]
处理器1101可以是通用中央处理器(cpu),微处理器,特定应用集成电路(application-specific integrated circuit,asic),或一个或多个用于控制以上方案程序执行的集成电路。
[0272]
该智能车辆内的存储器可以是只读存储器(read-only memory,rom)或可存储静态信息和指令的其他类型的静态存储设备,随机存取存储器(random access memory,ram)或者可存储信息和指令的其他类型的动态存储设备,也可以是电可擦可编程只读存储器(electrically erasable programmable read-only memory,eeprom)、只读光盘(compact disc read-only memory,cd-rom)或其他光盘存储、光碟存储(包括压缩光碟、激光碟、光碟、数字通用光碟、蓝光光碟等)、磁盘存储介质或者其他磁存储设备、或者能够用于携带或存储具有指令或数据结构形式的期望的程序代码并能够由计算机存取的任何其他介质,但不限于此。存储器可以是独立存在,通过总线与处理器相连接。存储器也可以和处理器集成在一起。
[0273]
计算机可读存储介质1104可以存储在智能车辆的存储器中,所述计算机可读存储介质1104用于存储计算机程序,所述计算机程序包括程序指令,所述处理器1101用于执行所述计算机可读存储介质1104存储的程序指令。处理器1101(或称cpu(central processing unit,中央处理器))是智能车辆的计算核心以及控制核心,其适于实现一条或一条以上指令,具体适于加载并执行一条或一条以上指令从而实现相应方法流程或相应功能;在一个实施例中,本技术实施例所述的处理器1101可以用于进行空气悬挂系统检测的
一系列处理,包括:获取数据流,并发送所述数据流至服务端;所述数据流包括与第一车辆的空气悬挂系统相关的k个数据;所述数据流用于所述服务端基于重要性采样方法对所述数据流包括的所述k个数据进行采样,获取对应的第一数据集合;所述第一数据集合包括与第一车辆的所述空气悬挂系统相关的m个数据;所述k个数据中包括所述m个数据;所述m个数据用于所述服务端获取n个第二数据集合;所述n个第二数据集合中的每一个第二数据集合包括所述m个数据中的一个或多个数据;所述n个第二数据集合对应n类特征,所述n类特征包括所述空气悬挂系统的调节特征、寿命特征和材料特征中的一个或多个;所述n个第二数据集合用于所述服务端基于所述n个第二数据集合以及所述n类特征对应的权重,确定所述空气悬挂系统的第一检测结果;m、n为大于或者等于1的整数,k为大于或者等于m的整数,等等。
[0274]
需要说明的是,本技术实施例中所描述的智能车辆中各功能单元的功能可参见上述图7中所述的方法实施例中的步骤s701-步骤s703的相关描述,还可以参见上述图8中所述的方法实施例中的步骤s801-步骤s809的相关描述,此处不再赘述。
[0275]
在上述实施例中,对各个实施例的描述都各有侧重,某个实施例中没有详述的部分,可以参见其他实施例的相关描述。
[0276]
本技术实施例还提供了一种计算机可读存储介质(memory),所述计算机可读存储介质是智能车辆中的记忆设备,用于存放程序和数据。可以理解的是,此处的计算机可读存储介质既可以包括智能车辆中的内置存储介质,当然也可以包括智能车辆所支持的扩展存储介质。计算机可读存储介质提供存储空间,该存储空间存储了智能车辆的操作系统。并且,在该存储空间中还存放了适于被处理器1101加载并执行的一条或一条以上的指令,这些指令可以是一个或一个以上的计算机程序(包括程序代码)。需要说明的是,此处的计算机可读存储介质可以是高速ram存储器,也可以是非不稳定的存储器(non-volatile memory),例如至少一个磁盘存储器;可选地还可以是至少一个位于远离前述处理器的计算机可读存储介质。
[0277]
本技术实施例还提供一种计算机程序,该计算机程序包括指令,当该计算机程序被计算机执行时,使得计算机可以执行任意一种检测方法的部分或全部步骤。
[0278]
在上述实施例中,对各个实施例的描述都各有侧重,某个实施例中没有详述的部分,可以参见其它实施例的相关描述。
[0279]
本技术的说明书和权利要求书及所述附图中的术语“第一”、“第二”、“第三”和“第四”等是用于区别不同对象,而不是用于描述特定顺序。此外,术语“包括”和“具有”以及它们任何变形,意图在于覆盖不排他的包含。例如包含了一系列步骤或单元的过程、方法、系统、产品或设备没有限定于已列出的步骤或单元,而是可选地还包括没有列出的步骤或单元,或可选地还包括对于这些过程、方法、产品或设备固有的其它步骤或单元。
[0280]
在本文中提及“实施例”意味着,结合实施例描述的特定特征、结构或特性可以包含在本技术的至少一个实施例中。在说明书中的各个位置出现该短语并不一定均是指相同的实施例,也不是与其它实施例互斥的独立的或备选的实施例。本领域技术人员显式地和隐式地理解的是,本文所描述的实施例可以与其它实施例相结合。
[0281]
在本说明书中使用的术语“部件”、“模块”、“系统”等用于表示计算机相关的实体、硬件、固件、硬件和软件的组合、软件、或执行中的软件。例如,部件可以是但不限于,在处理
器上运行的进程、处理器、对象、可执行文件、执行线程、程序和/或计算机。通过图示,在计算设备上运行的应用和计算设备都可以是部件。一个或多个部件可驻留在进程和/或执行线程中,部件可位于一个计算机上和/或分布在2个或更多个计算机之间。此外,这些部件可从在上面存储有各种数据结构的各种计算机可读介质执行。部件可例如根据具有一个或多个数据分组(例如来自与本地系统、分布式系统和/或网络间的另一部件交互的二个部件的数据,例如通过信号与其它系统交互的互联网)的信号通过本地和/或远程进程来通信。
[0282]
需要说明的是,对于前述的各方法实施例,为了简单描述,故将其都表述为一系列的动作组合,但是本领域技术人员应该知悉,本技术并不受所描述的动作顺序的限制,因为依据本技术,某些步骤可能可以采用其他顺序或者同时进行。其次,本领域技术人员也应该知悉,说明书中所描述的实施例均属于优选实施例,所涉及的动作和模块并不一定是本技术所必须的。
[0283]
在本技术所提供的几个实施例中,应该理解到,所揭露的装置,可通过其它的方式实现。例如,以上所描述的装置实施例仅仅是示意性的,例如上述单元的划分,仅仅为一种逻辑功能划分,实际实现时可以有另外的划分方式,例如多个单元或组件可以结合或者可以集成到另一个系统,或一些特征可以忽略,或不执行。另一点,所显示或讨论的相互之间的耦合或直接耦合或通信连接可以是通过一些接口,装置或单元的间接耦合或通信连接,可以是电性或其它的形式。
[0284]
上述作为分离部件说明的单元可以是或者也可以不是物理上分开的,作为单元显示的部件可以是或者也可以不是物理单元,即可以位于一个地方,或者也可以分布到多个网络单元上。可以根据实际的需要选择其中的部分或者全部单元来实现本实施例方案的目的。
[0285]
另外,在本技术各实施例中的各功能单元可以集成在一个处理单元中,也可以是各个单元单独物理存在,也可以两个或两个以上单元集成在一个单元中。上述集成的单元既可以采用硬件的形式实现,也可以采用软件功能单元的形式实现。
[0286]
上述集成的单元如果以软件功能单元的形式实现并作为独立的产品销售或使用时,可以存储在一个计算机可读取存储介质中。基于这样的理解,本技术的技术方案本质上或者说对现有技术做出贡献的部分或者该技术方案的全部或部分可以以软件产品的形式体现出来,该计算机软件产品存储在一个存储介质中,包括若干指令用以使得一台计算机设备(可以为个人计算机、服务端或者网络设备等,具体可以是计算机设备中的处理器)执行本技术各个实施例上述方法的全部或部分步骤。其中,而前述的存储介质可包括:u盘、移动硬盘、磁碟、光盘、只读存储器(read-onlymemory,缩写:rom)或者随机存取存储器(randomaccessmemory,缩写:ram)等各种可以存储程序代码的介质。
[0287]
以上所述,以上实施例仅用以说明本技术的技术方案,而非对其限制;尽管参照前述实施例对本技术进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本技术各实施例技术方案的精神和范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。