1.本发明属于水声图像处理领域,涉及一种基于声纳的网箱鱼群逃逸报警方法。
背景技术:
2.网箱养殖是一种经济、高效、环保的新型养殖方式。对于渔业养殖户来讲,判断网箱的网衣是否破损、鱼群是否从破损的网衣处逃出网箱是非常必要的,能够及时掌握网箱中鱼群的数量,降低养殖户风险。
3.养殖企业在湖泊或近海中放入网箱,网箱由骨架和网衣组成,以防止鱼群逃出网箱,又能使用流动的水资源,以实现健康养殖。但是由于网箱位于水下,网衣是否破损很难发现,如果网衣破损,鱼群全部从网箱出逃,或者养殖鱼群的天敌进入网箱,对于养殖户来说损失是巨大的。传统的方法可以在网箱外侧安装视频监控,监测网衣状态,但是对很多水域,例如我国的东海海域,水体浑浊,能见度低,光学视频无法达到目的。因此本发明提出可采用声纳安装于网衣外侧,监测是否有鱼群从破损的网衣处逃逸。现有的监测方法中基于声学的监测设备尚未见到相关报道。
技术实现要素:
4.本发明的目的在于解决现有技术问题,提供一种基于声纳的网箱鱼群逃逸报警方法,所述方法为在网箱的至少一个面安装主动声纳,接收声纳回波,经过信号处理形成声学图像,基于声学图像进行鱼群逃逸报警。由于每部声纳只能负责网箱的一个侧面,因此可以在网箱的每个侧面及顶部、底部等各安装一部声纳,实现监测的全覆盖。如果网衣破损,鱼群从破损处逃逸,则可以通过声纳图像进行监测并发出报警信号。
5.本发明解决其技术问题所采用的技术方案是:
6.一种基于声纳的网箱鱼群逃逸报警方法,所述方法为在网箱的至少一个面设有声呐,通过接收声呐回波获得声学图像,基于声学图像进行鱼群逃逸报警判定,具体包含以下步骤:
7.步骤一:获得声学图像,进行背景初始化得到初始化背景;
8.步骤二:将新获得的声学图像与初始化背景进行比对,得到二值图像;
9.步骤三:对初始化背景进行更新,重复步骤二和步骤三;
10.步骤四:对二值图像进行膨胀,腐蚀,联通区域检测;
11.步骤五:基于目标点提取方法对连通区域提取疑似目标点,记录疑似目标点所在像素位置;
12.步骤六:集合所有疑似目标点的像素位置,得到结果矩阵;
13.步骤七:基于若干周期的结果矩阵,确定是否报警。
14.通过采用所述技术方案,在网箱的至少一个面配置设有声呐,声呐的监测范围能够覆盖当前声呐所在的网箱面,当鱼从网箱的当前面逃出时,会穿过当前面,此时会通过声呐的监测范围,从而实现监测鱼群出逃现象的目的。
15.优选的,所述声呐为全景声呐,更优选为圆柱型全景声呐。通过采用所述技术方案,可以进一步提升声呐的观察范围,将观察范围扩展至360
°
范围内,能够更加全面的进行监控,更及时的获知鱼群的逃逸情况并发出报警信号。
16.优选的,所述声呐设置于网箱的侧面、底面、顶面的至少一个面,其中所述侧面可以为一个或多个侧面;所述声呐可以为多个。通过采用所述技术方案,可以根据实际情况对网箱进行多元环、全方位的监控,更加全面监测鱼群的逃逸情况。
17.优选的,所述步骤一中,获得的声学图像对应存储于二维矩阵中,进行背景初始化;更优选的,声学图像存储于二维矩阵img(m,n)中,其中m,n为图像像素位置;更优选的,通过如下步骤进行背景初始化:将前l帧(第一帧至第l帧)声学图像的对应像素点的像素值求平均值得到矩阵a(m,n),对矩阵a(m,n)的每个像素点建立高斯模型,初始化高斯模型的均值矩阵avg(m,n)=a(m,n),高斯模型的方差矩阵std(m,n)=a(m,n)。
18.本发明中,所述步骤二中,新获得的声学图像是指除步骤一中所述用于背景初始化的声学图像外的下一帧声学图像;结合上述可知,新获得的声学图像为第l 1帧声学图像。
19.优选的,所述步骤二中,新获得的声学图像存储于二维矩阵后进行比对;更优选的,新获得的声学图像矩阵img(m,n),使用img(m,n)减去均值矩阵avg(m,n),结果与方差矩阵std(m,n)对应点比较,如果差值大于门限,则认为该点是前景点,令二值图像ground(m,n)对应的点为1,否则该点为背景点,令二值图像ground(m,n)对应的点为0。更优选的,二值图像的绘制公式为式(1)所示:
[0020][0021]
优选的,所述步骤三中,依据更新因子alpha,对背景进行更新,得到更新后的背景,重复步骤二,将新获得的声学图像与更新后的背景进行比对,得到对应的二值图像,并再次重复步骤三对背景进行更新,循环往复;更优选的,依据更新因子alpha,更新背景的均值矩阵avg(m,n)和方差矩阵std(m,n);更优选的,更新因子alpha为预先设定,一般设定为0.1或0.05。从而实现背景的更新,适应不断变化的场景。更优选的,背景更新的高斯模型更新公式为式(2)和(3)所示:
[0022]
avg(m,n)=alpha*img(m,n) (1-alpha)*avg(m,n)(2)
[0023]
std(m,n)=alpha*(img(m,n)-avg(m,n)) (1-alpha)*std(m,n)(3)
[0024]
优选的,所述步骤五中目标点提取方法为,以联通区域的最大像素值所在的像素点或者质心所在的像素点为疑似目标点,提取疑似目标点所在的像素位置。
[0025]
优选的,所述步骤六中,集合所有疑似目标点的像素位置后得到集合s={(x,y)},其中x,y为疑似目标点所在的像素位置,s为疑似目标点的集合。
[0026]
优选的,所述步骤六中,通过如下方式得到结果矩阵:假定声学图像的尺寸为(m,n),即宽度为m个像素点,高度为n个像素点,将声学图像在宽度方向均匀划分为m1块,高度方向均匀划分为n1块,则整个声学图像被分成m1*n1个小区域,建立矩阵result(m1,n1),对应m1*n1个小区域,初始化为全零,然后与集合进行比对,将集合s中的每个元素(x,y)对应于矩阵result相应的位置(区域)记为1,则表示该区域存在目标,得到结果矩阵。其中,m,n表示图像的尺寸,与步骤一中m、n关系为:0《=m《m,0《=n《n。通过采用所述技术方案,即使
目标在多个周期中具有一定的像素位置差别,但仍然可以通过m1*n1的区域划分使这些目标落入同一个区域,从而有效避免漏报警或者误报警,实现高报警效率。
[0027]
优选的,所述步骤七中,通过如下方式确定是否报警:对连续n个周期的结果矩阵result(m1,n1)进行统计,如果在同一个区域内,n个周期中有p个周期存在目标,则表明该处网衣破损,进行报警处理,否则该处网衣未破损。其中,声呐发射一次信号,接收回波并形成一幅图像,称为一个周期。
[0028]
更优选的,具体包含以下步骤:
[0029]
步骤一:初始化图像背景,声学图像存储于二维矩阵img(m,n)中,其中m,n为图像像素位置;将前l帧声学图像的对应像素点求平均值得到矩阵a(m,n),对每个点建立高斯模型,初始化高斯模型的均值矩阵avg(m,n)=a(m,n),高斯模型的方差矩阵std(m,n)=a(m,n)。
[0030]
步骤二:对新的声学图像矩阵img(m,n),使用img(m,n)减去均值矩阵avg(m,n),结果与方差std(m,n)对应点比较,如果差值大于门限,则认为该点是前景点,二值图像ground(m,n)对应的点为1,否则该点为背景点,令二值图像ground(m,n)对应的点为0。
[0031]
步骤三:依据更新因子alpha,更新背景的均值矩阵avg(m,n)和方差矩阵std(m,n)。
[0032]
步骤四:对二值图像ground(m,n)进行膨胀,腐蚀,联通区域检测。
[0033]
步骤五:根据标记的联通区域提取疑似目标点,记录疑似目标点所在位置。
[0034]
步骤六:疑似目标点所在位置的结果存于集合s={(x,y)},其中x,y为疑似目标所在的位置,s为疑似目标点的集合;假定声学图像的尺寸为(m,n),即宽度为m个像素点,高度为n个像素点,将声学图像在宽度方向均匀划分为m1块,高度方向均匀划分为n1块,则整个声学图像被分成m1*n1个小区域,建立矩阵result(m1,n1),对应m1*n1个小区域,初始化为全零,对于集合s中的每个元素(x,y),将该元素对应于result相应的位置记为1,得到结果矩阵。
[0035]
步骤七:对n个周期的结果矩阵result(m1,n1)进行统计,如果在同一个区域内,连续n个周期中有p个周期存在目标,则表明该处网衣破损,进行报警处理,否则该处网衣未破损。其中,声呐发射一次信号,接收回波,并形成一幅图像,称为一个周期。
[0036]
与现有技术相比,本发明的有益效果是:不管在清澈水域还是浑浊水域,在网衣破损,鱼群逃逸时能进行有效监测报警。
附图说明
[0037]
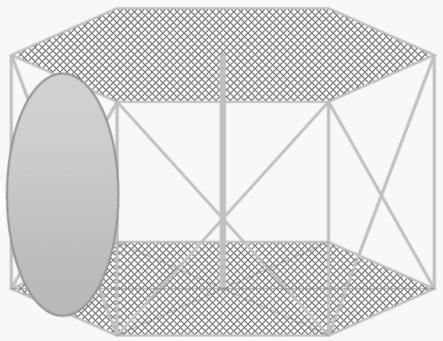
图1是本发明声纳的一种安装方式。
具体实施方式
[0038]
下面通过具体实施例,并结合附图,对本发明的技术方案作进一步的具体说明。
[0039]
实施例1
[0040]
本发明提供一种基于声纳的网箱鱼群逃逸报警方法,包括七个步骤:
[0041]
步骤一,初始化背景图像;
[0042]
步骤二,新图像与背景图像相减,形成前景图像;
[0043]
步骤三,更新背景图像,以适应不断变化的背景;
[0044]
步骤四,对步骤二形成的前景图像进行膨胀,腐蚀,联通区域检测;
[0045]
步骤五,提取疑似目标点;
[0046]
步骤六,将声纳图像分成多个小区域,将疑似目标点标记至对应的小区域;
[0047]
步骤七,根据连续多个周期的结果,对每个小区域的疑似目标数进行统计,判定是否进行报警处理。
[0048]
如图1所示为较为典型的网箱,在网箱侧面安装圆柱型全景主动声纳,接收声纳回波,经过信号处理形成声学图像,针对声学图像进行鱼群逃逸报警。图中阴影部分为声纳覆盖范围。
[0049]
本发明中,声呐发射信号后接收回波,经过处理形成一幅图像,即为获得的声学图像,该过程称为一个周期,接着再发射一次信号,再形成一幅声学图像,为下一个周期,是一个连续不断的过程;每次形成的声学图像均对应存储在一个二维矩阵中,进行后续步骤。
[0050]
由于每部声纳只能负责网箱的一个侧面,因此可以在每个侧面及顶部、底部各安装一部声纳,实现监测的全覆盖。如果网衣破损,鱼群从破损处逃逸,可以通过声纳得到的声学图像进行监测报警,处理流程如下所示,其包含以下步骤:
[0051]
步骤一:初始化背景:声学图像存储于二维矩阵img(m,n)中,其中m,n为像素位置;将前l帧声学图像的对应像素点求平均值得到矩阵a(m,n),对每个点建立高斯模型,初始化高斯模型的均值矩阵avg(m,n)=a(m,n),高斯模型的方差矩阵std(m,n)=a(m,n)。
[0052]
步骤二:对新获得的声学图像矩阵img(m,n),使用img(m,n)减去均值矩阵avg(m,n),结果与方差std(m,n),对应点比较,如果差值大于门限,则认为该点是前景点,令二值图像ground(m,n)对应的点为1,否则该点为背景点,令二值图像ground(m,n)对应的点为0。k值是一个经验值,根据不同的场景调整。
[0053][0054]
步骤三:依据更新因子alpha,更新均值矩阵avg(m,n)和方差矩阵std(m,n)。
[0055]
由于环境的不断变化,背景图像也需要不要迭代更新,根据更新因子alpha不断更新高斯模型的均值矩阵avg(m,n)和方差矩阵std(m,n),并且由于背景不断迭代的特性,可以适应不断变化的环境。背景图像更新的高斯模型更新公式为公式2和公式3:
[0056]
avg(m,n)=alpha*img(m,n) (1-alpha)*avg(m,n)(2)
[0057]
std(m,n)=alpha*(img(m,n)-avg(m,n)) (1-alpha)*std(m,n)(3)
[0058]
步骤四:对二值图像ground(m,n)进行膨胀,腐蚀,联通区域检测。
[0059]
运动目标的像素点由于背景减除可能形成一系列距离较近的离散的点,而一些杂波点也会以孤立点的形式存在。通过对二值图像ground(m,n)进行膨胀、腐蚀操作,将这些孤立的点移除,并把离散的像素点连接起来。经过膨胀、腐蚀操作后,会形成一系列联通区域,联通区域是由具有相同像素值的相邻像素组成像素的集合,对于每个联通区域,赋予一个唯一的标识。
[0060]
步骤五:提取疑似目标点,记录疑似目标点所在像素位置。
[0061]
经过联通区域检测后,每个联通区域具有各自的一个标记值,记录这些联通区域最大像素值的位置,或者质心的位置,将记录结果存于集合s={(x,y)},其中x,y为目标所
在的位置,s为疑似目标点的集合。
[0062]
步骤六:集合疑似目标点所在像素位置,得到集合s={(x,y)},其中x,y为疑似目标点所在的像素位置,s为疑似目标点的集合;将集合s对应到结果矩阵result(m1,n1)中,得到结果矩阵。
[0063]
假定声学图像的尺寸为(m,n),即宽度为m个像素点,高度为n个像素点,将声学图像在宽度方向均匀划分为m1块,高度方向均匀划分为n1块,则整个声学图像被分成m1*n1个小区域,建立矩阵result(m1,n1),对应m1*n1个小区域,初始化为全零,对于集合s中的每个元素(x,y),将该元素对应于result相应的位置置为1,则表示该区域存在目标,得到结果矩阵。
[0064]
步骤七:基于若干周期的结果矩阵,对结果进行判定是否报警处理。
[0065]
对连续n个周期的result(m1,n1)进行统计,如果在同一个区域内,连续n个周期中有p个周期存在目标,则表明该处网衣破损,进行报警处理,否则该处网衣未破损。
[0066]
以上所述的实施例只是本发明的较佳方案,并非对本发明作任何形式上的限制,在不超出权利要求所记载的技术方案的前提下还有其它的变体及改型。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。