1.本发明涉及机器人领域,具体是一种针对煤矿皮带输送机的落煤清扫回收一体化装置。
背景技术:
2.当今多数煤矿采用皮带输送机对采集的煤矿进行运输,但在运输过程中由于皮带粘连煤渣会导致煤渣在皮带下方形成堆积,严重的甚至会阻碍皮带转动。如今多数采用人工清理的方式,定期停机,进行人工清扫。然而这种方式会耗费大量人力,且无法保证运输皮带连续作业,清理及运煤效率底下,且堆积过久的落煤清理难度大。现存的清扫机器人无法适应运输通道中昏暗、潮湿、有粉尘且路面存在台阶的环境;落煤呈潮湿泥土状且有结块,现存的清扫机器人无法理想的完成作业任务。
技术实现要素:
3.本发明的目的在于解决现有落煤清扫效率低的技术问题,设计了一种落煤清扫回收一体化机器人,可对皮带输送机通道中堆积的落煤进行清理并送回皮带输送机上方。
4.为实现上述目的,本发明采用了如下技术方案:
5.一种落煤清扫回收一体化机器人,包括负责将皮带输送机下落煤推出至人行侧的刮煤子机器人和负责将人行侧落煤以及皮带输送机下子机器人刮出煤的清扫收集并将收集的落煤运输回皮带输送机上的主机器人;
6.所述子机器人包括刮板,刮板支架和实现移动的子机器人车体;
7.所述主机器人包括铲煤机构,主机器人车体,粉碎机构,传送机构和储煤仓;
8.所述铲煤机构包括铲斗和铲斗连杆;
9.所述粉碎机构包括螺旋滚筒;
10.所述传送机构包括传送皮带和铲煤板;
11.所述储煤仓包括储煤仓盖,储煤仓箱体和储煤仓升降剪刀叉。
12.进一步地,所述的刮板支架下方安装有轮子使刮板支架可在地面上移动;所述的刮板铰接在所述刮板支架上,通过电机实现翻转;所述的刮板支架通过液压缸连接在所述的子机器人车体上,液压杆推动所述的刮板支架到达皮带运输机下方,并利用所述的刮板将皮带运输机下方的落煤刮至皮带运输机旁的人行侧。
13.进一步地,所述的铲煤机构的铲斗铰接在所述的主机器人车体上,并通过液压缸驱动实现翻转进行铲煤。
14.进一步地,所述的粉碎机构由两个螺旋滚筒构成,所述的滚筒安装在所述的主机器人车体上,所述的滚筒由电机驱动,通过滚动将所述铲煤机构铲取的煤粉碎并运输至所述的传送机构的进料口处。
15.进一步地,所述的传送机构内部设有电机及传送皮带,传送皮带上安装有铲煤板,通过电机带动传送皮带转动,传送皮带上的铲煤板将进料口处被粉碎机构粉碎的煤渣传送
至出料口。
16.进一步地,所述的储煤仓设置在所述传送机构出料口的下方,收集和储存粉碎后的煤渣;所述的储煤仓下方安装有剪刀叉升降平台,升降平台由液压缸驱动储煤仓升降剪刀叉,可使所述的储煤仓升高并倾斜;所述的储煤仓盖与储煤仓箱体铰接,并通过电机驱动实现开合。
17.进一步地,所述的主机器人车体和子机器人车体安装在单条轨道上,并通过电机驱动轨道轮实现移动;所述的主机器人车体和子机器人车体侧面安装由辅助轮对车体进行支撑。
18.本发明一种落煤清扫回收一体化机器人,该机器人包括刮煤的子机器人和收集煤渣并将煤渣运回皮带上方的主机器人。而主机器人包括铲煤机构、粉碎机构、传送机构和储煤仓,这样的结构设置使得该装置可以实现连续的落煤清扫和回收作业,极大的提高了皮带输送机的运行效率,解决了人工清扫效率低人力消耗大以及人工扫煤时皮带输送机需停机的问题,同时机器人可连续作业,实现地面可以定时清扫,解决了落煤过多清扫难度大的问题;
19.本发明中,储煤仓的剪刀叉升降平台采用不同长度的推杆,在实现储煤仓升起的同时使储煤仓倾斜,更利于煤渣的倾倒;储煤仓定时向皮带输送机卸煤,保证了储煤仓不会过满而溢出,从而保证了清扫及回收的效率和效果;
20.本发明中,粉碎机构采用螺旋滚筒,在粉碎大块煤渣的同时运输煤渣至传送装置的进料口,方便后续煤渣的传送,提高了煤渣的传送效率的同时使机器人整体结构更加紧凑。
附图说明
21.为了更清楚地说明本发明实施例的技术方案,下面将对实施例描述所需要使用的附图作简单地介绍,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
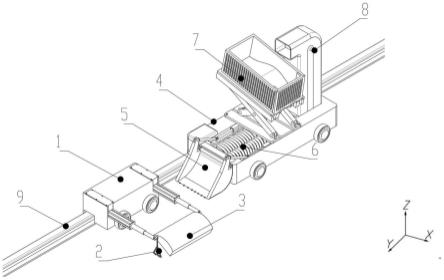
22.图1为本发明一种落煤清扫回收一体化机器人的整体结构示意图;
23.图2为本发明一种落煤清扫回收一体化机器人主机器人车体的结构示意图;
24.图3为本发明一种落煤清扫回收一体化机器人主机器人传送装置的内部结构示意图;
25.图4为本发明一种落煤清扫回收一体化机器人的储煤仓结构示意图。
26.附图中,各标号所代表的部件列表如下:
27.1子机器人车体,2刮板支架,3刮板,4主机器人车体,5铲斗,6粉碎机构,7储煤仓,8传送机构,51铲斗连杆,52铲斗连杆,53液压缸,54液压缸,61螺旋滚筒,62螺旋滚筒,63滚筒电机,81传送机构电机,82传送皮带,83铲煤板,71储煤仓盖,72储煤仓箱体,73储煤仓升降剪刀叉,74储煤仓升降液压缸,9轨道。
具体实施方式
28.为了使本发明实现的技术手段、创作特征、达成目的与功效易于明白了解,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,所描述
的实施例仅以一次清理及回收流程为实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其它实施例,都属于本发明保护的范围。
29.如图1至图4所示,本发明为一种落煤清扫回收一体化机器人,包括刮取皮带下方落煤的子机器人和收集落煤并送回皮带输送机的主机器人,子机器人包括子机器人车体1,刮板支架2和刮板3,其中刮板支架2通过液压缸连接在子机器人车体1上,刮板支架2下方安装有轮子,刮板支架2可在液压缸的推力下移动至皮带输送机下方,刮板3铰接在刮板支架2上,并随刮板支架2移动,刮板3可在电机驱动下实现翻转;主机器人包括主机器人车体4,铲斗5,粉碎机构6,传送机构8和储煤仓7,其中铲斗5铰接在车体4上,并通过液压缸驱动实现翻转将煤铲入粉碎机构6中,粉碎机构6将大块的煤块粉碎并运送至传送机构8的进料口处,传送机构8将煤传送至储煤仓7,储煤仓通过剪刀叉升降平台将储煤仓抬起并将收集的落煤倾倒至皮带输送机上方;子机器人车体1和主机器人车体4都包括在轨道上移动的轨道轮和起支撑作用的辅助轮。
30.通过上述技术方案:
31.该机器人在运行时,子机器人在主机器人前方移动,进行刮煤作业时,子机器人停止运动,并通过伸长子机器人车体1上的液压杆推动刮板支架2移动至皮带输送机下方,移动过程中,刮板3通过电机驱动翻转,与地面保持一定角度,使得刮板2可以从堆积的落煤上方通过。当刮板支架到达皮带输送机下方最远端时,通过电机驱动刮板3转动到与地面垂直的位置,进一步的,子机器人车体1上的液压杆收缩,拉动刮板支架2带动刮板3向靠近子机器人车体的方向移动,移动过程中,刮板3将地上的落煤刮出皮带输送机下方并位于主机器人的移动路径上,方便后续的收集和回收作业。
32.进一步的主机器人和子机器人一起向前移动,并将刮板2刮出的煤铲入主机器人的铲斗5中,主机器人通过收缩安装在主机器人车体4上的液压缸53和液压缸54进而拉动铲斗连杆51和铲斗连杆52进而使铲完煤渣的铲斗5翻转,将煤渣倾倒至粉碎机构6,倾倒作业完成后铲斗5复位。进一步的通过滚筒电机63和齿轮驱动螺旋滚筒61和螺旋滚筒62反向转动,将倾倒入粉碎机构6的煤渣粉碎,并通过螺旋的转动将粉碎后煤渣运送至传送机构8的进料口处。
33.进一步的,传送机构电机81转动,带动传送皮带82以及传送皮带82上的铲煤板83转动,刮煤板83刮取运输至传送机构8进料口的被粉碎的煤渣,并通过传送皮带82带动向上运动,当刮煤板83到达顶端时会将铲上来的煤渣倾倒至出料口。
34.进一步的,储煤仓7安置在传送机构8的出料口下方,储煤仓箱体72可以收集从传送机构8倾倒下来的煤渣,收集一定时间后,储煤仓箱体升降液压缸74会推动储煤仓升降剪刀叉73运动,进而推动储煤仓箱体72向上运动,使储煤仓箱体72到达皮带输送机上方,进一步的通过电机驱动与储煤仓箱体72铰接的储煤仓盖71转动到与储煤仓箱体72底板平行的位置,此时的储煤仓盖74充当煤渣通道的作用,利用重力将收集在储煤仓箱体72中的煤渣倾倒至皮带输送机上,倾倒作业完成后储煤仓盖71和储煤仓升降剪刀叉73复位。
35.至此,一次清理及回收作业完成,机器人继续前进并循环清理和回收流程。
36.以上公开的本发明优选实施例只是用于帮助阐述本发明。优选实施例并没有详尽叙述所有的细节,也不限制该发明仅为所述具体实施方式。显然,根据本说明书的内容,可
作很多的修改和变化。本说明书选取并具体描述这些实施例,是为了更好地解释本发明的原理和实际应用,从而使所属技术领域技术人员能很好地理解和利用本发明。本发明仅受权利要求书及其全部范围和等效物的限制。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
