1.本发明涉及地理信息服务技术领域,尤其涉及一种空天地视频传感器协同规划方法及系统。
背景技术:
2.随着城市化进程的加快和经济的快速发展,大量人流、车流、物流不断涌入城市,城市内部机动车数量飞速增加,使城市交通系统面临巨大压力,城市交通问题突出,交通拥堵现象频繁发生。尤其在暴雨、暴雪、冰冻、大风等恶劣天气下,城市道路路网的可靠性降低,交通安全事故易发,极易引发严重的城市交通拥堵,甚至整个道路交通系统的瘫痪,给城市带来巨大损失。因此,进行高效地应急管理,保障恶劣天气下城市交通效率是交通部门所关注的重点问题之一。为了应对突发自然灾害下的交通拥挤,交通部门通常需要积极进行应急处置,整个过程包括信息获知、有效响应、重点应对和快速恢复四个主要阶段。其中,信息获取阶段要求交通管理部门不仅要主动加强与气象部门防汛部门沟通,还应积极通过交通技术监控设备等信息途径获取路面信息,及时预判道路状况,做好预警工作。通过交通监控视频分析,有关部门能够获取包括车速、车流量、突发交通事件现场状况、局部恶劣天气等在内的诸多重要观测信息。因此,视频数据为交通应急管控提供了重要决策依据,及时高效地获取道路视频信息辅助交通部门应急决策十分关键。
3.然而,不同与一般人为交通事故,突发恶劣天气下受影响的道路更多,往往需要对整片路网进行信息获取,应急工作难度较大。当前主要的视频信息获取手段是路面交通监控设备,其主要特征为具有固定布设位置,能够长时间不间断进行目标路段监视,而监视视域范围较小,仅能覆盖几百米范围的道路信息。对于整片路网的覆盖,地面视频摄像机的能力有限,因而现存地面视频监控网络一般存在大量监视盲区。在应急信息获取阶段,若要填补监视盲区,将需要增设大量临时监视设备。但由于成本限制,往往无法实现大量临时设备的增设。由此,单一采用地面交通监控摄像机,难以满足恶劣天气下大面积受影响路网的信息获取。随着卫星技术、无人机技术的快速发展,视频信息的获取途径已延伸向空天平台。在卫星平台方面,视频卫星快速发展,已成为未来遥感商业发展的重要方向。目前,我国长光卫星公司已发射多颗“吉林一号”星座视频卫星。“吉林一号”视频卫星可拍摄米级分辨率的全彩视频,能够对特定目标进行实时观测,覆盖范围较广。在无人机方面,搭载视频传感器的无人机灵活性高,能够克服路网的物理约束,飞到待目标点进行观测,已被应用于交通监视场景。由此可见,空天地各平台视频传感器特点各异,在应急任务中能够进行能力互补,使用空天平台对地面视频网络进行补充具备极大应用潜力。在此背景下,为了克服交通应急阶段单一平台的缺陷,需要一种空天地视频传感器协同规划方法,高效实现观测平台间的互补观测和应急协同。
4.目前,面向交通应急场景的信息获取仍采用单一平台传感器调度方法,主要为在关键路段增设地面临时监视点。然而,地面临时监控点能够获取的信息有限,且增设过程会受到交通拥堵的限制。尽管部分交通单位已采用无人机进行应急监视,但使用过程中,空地
各平台相互独立,易出现观测不及时或不完整,调度混乱等现象。在现有研究中,视频传感器规划方面也多以单一平台为研究对象,即单独考虑地面视频网络部署、视频卫星目标任务规划、无人机交通监视任务规划等方面的研究,还未有考虑空天地视频传感器协同观测的相关内容。
5.上述内容仅用于辅助理解本发明的技术方案,并不代表承认上述内容是现有技术。
技术实现要素:
6.为解决上述技术问题,本发明提供一种空天地视频传感器协同规划方法,包括:
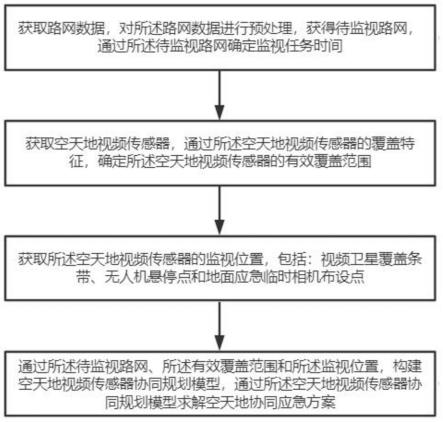
7.s1:获取路网数据,对所述路网数据进行预处理,获得待监视路网,通过所述待监视路网确定监视任务时间;
8.s2:获取空天地视频传感器,通过所述空天地视频传感器的覆盖特征,确定所述空天地视频传感器的有效覆盖范围;
9.s3:获取所述空天地视频传感器的监视位置,包括:视频卫星覆盖条带、无人机悬停点和地面应急临时相机布设点;
10.s4:通过所述待监视路网、所述有效覆盖范围和所述监视位置,构建空天地视频传感器协同规划模型,通过所述空天地视频传感器协同规划模型求解空天地协同应急方案。
11.优选的,步骤s1具体为:
12.s11:对所述路网数据进行矢量化的抽象表达,以多段线表征所述路网数据的路网物理形态,获得矢量化的路网数据;
13.s12:按照一定间隔长度对所述矢量化的路网数据进行离散化操作,获得所述待监视路网;所述待监视路网包括若干长度相同的子路段,用以表征空天地视频传感器的观测对象;
14.s13:根据监视任务确定所述待监视路网的监视任务时间。
15.优选的,步骤s2具体为:
16.s21:所述空天地视频传感器包括:视频卫星、无人机和地面应急临时相机;
17.s22:获取当前在轨的视频卫星集合,通过sgp4模型计算各视频卫星的卫星轨道,获得各视频卫星的轨道高度,结合视频传感器幅宽参数,计算获得各视频卫星的对地覆盖范围;
18.s23:获取当前可调度的无人机集合,将各无人机的对地覆盖范围抽象为圆,根据各无人机机载视频镜头的视域和无人机悬停高度,使用正切三角函数公式,计算获得各无人机的对地覆盖范围;
19.s24:获取当前可用的地面应急临时相机集合,根据各地面应急临时相机的视域参数及布设高度,计算获得各地面应急临时相机的覆盖范围;
20.s25:由各所述视频卫星的对地覆盖范围、各所述无人机的对地覆盖范围和各所述地面应急临时相机的覆盖范围,组成所述空天地视频传感器的有效覆盖范围。
21.优选的,步骤s3具体为:
22.s31:根据视频卫星的敏捷性特征,获取视频卫星的侧摆角范围,在侧摆角范围中选取多个侧摆角度值;针对各侧摆角度值,基于所述监视任务时间,进行面向所述待监视路
网的视频卫星条带仿真,获取多个视频卫星条带;对各所述视频卫星条带沿视频卫星的前进方向进行等间距划分,获得多个符合视频卫星幅宽的方形矢量数据,通过所述方形矢量数据表征所述视频卫星覆盖条带;
23.s32:按照预设的时间间隔,使用等距离取点方法,获取所述待监视路网上的等距离点集,通过所述等距离点集表征所述无人机悬停点和所述地面应急临时相机布设点,所述无人机悬停点和所述地面应急临时相机布设点的位置相同。
24.优选的,步骤s4具体为:
25.s41:根据观测需求,确定所述空天地视频传感器协同规划模型的路网覆盖长度;
26.s42:设置约束条件,具体包括:通过所述有效覆盖范围和所述监视位置,确定空天地视频传感器的协同覆盖关系约束;通过视频卫星的成像特点,确定视频卫星的成像次数约束;通过当前资源数量,设置视频卫星数量约束、无人机数量约束和地面应急临时相机数量约束;
27.s43:通过所述约束条件和所述路网覆盖长度构建所述空天地视频传感器协同规划模型;
28.s44:通过分支切面算法求解所述空天地视频传感器协同规划模型的最优解,将所述最优解作为所述空天地协同应急方案。
29.优选的,所述空天地视频传感器协同规划模型的表达式为:
[0030][0031][0032][0033][0034][0035][0036][0037][0038][0039][0040][0041][0042]
其中,z为目标函数;i表示需求对象的编号,i为需求对象集合;j表示地面应急临时相机布设点的编号,j为地面应急临时相机布设点集合;k表示视频卫星的编号,k为视频
卫星集合;l为无人机悬停点的编号,l为无人机悬停点集合;rk表示视频卫星k的视频卫星覆盖条带,r为视频卫星覆盖条带集合;qk表示视频卫星k是否被用于获取路网数据,是则取值为1,否则为0;yi表示需求对象i是否被覆盖,是则取值为1,否则为0;xj表示地面应急临时相机是否在布设点位j被布设,是则取值为1,否则为0;z
l
表示无人机是否在悬停点l被布设,是则取值为1,否则为0;表示视频卫星覆盖条带rk是否被用于获取路网数据,是则取值为1,否则为0;wi表示需求对象i的权重值;ni表示能够覆盖需求对象i的所有地面应急临时相机布设点的集合;mi表示能够覆盖需求对象i的所有视频卫星覆盖条带的集合;vi表示能够覆盖需求对象i的所有无人机悬停点的集合;p表示地面应急临时相机的总数量;b表示待使用视频卫星的总数量;d表示待使用无人机的总数量。
[0043]
一种空天地视频传感器协同规划系统,包括:
[0044]
待监视路网获取模块,用于获取路网数据,对所述路网数据进行预处理,获得待监视路网,通过所述待监视路网确定监视任务时间;
[0045]
有效覆盖范围计算模块,用于获取空天地视频传感器,通过所述空天地视频传感器的覆盖特征,确定所述空天地视频传感器的有效覆盖范围;
[0046]
监视位置获取模块,用于获取所述空天地视频传感器的监视位置,包括:视频卫星覆盖条带、无人机悬停点和地面应急临时相机布设点;
[0047]
空天地协同应急方案获取模块,用于通过所述待监视路网、所述有效覆盖范围和所述监视位置,构建空天地视频传感器协同规划模型,通过所述空天地视频传感器协同规划模型求解空天地协同应急方案。
[0048]
本发明具有以下有益效果:
[0049]
1、本发明通过确定空天地视频传感器覆盖范围,提取视频卫星条带及部署点位,建立并求解面向交通应急场景的空天地视频传感器协同规划模型,可以得到满足应急交通监视任务需求的最优空天地视频传感器部署方案,高效地进行应急路网交通状况监视;
[0050]
2、相较于以往考虑单平台的规划技术,本发明方法所求得协同部署方案的覆盖性能更高,使得交通部门能够更加完整地获得一次路网交通信息,更加符合应急交通信息获取需求。
附图说明
[0051]
图1为本发明实施例方法流程图;
[0052]
图2为矢量化的路网数据示意图;
[0053]
图3为视频卫星覆盖条带示意图;
[0054]
图4为天地协同应急方案示意图;
[0055]
图5为单一规划现有10架无人机资源的覆盖结果;
[0056]
图6为单一规划无人机达到与空天地协同结果相同覆盖率时的覆盖结果;
[0057]
本发明目的的实现、功能特点及优点将结合实施例,参照附图做进一步说明。
具体实施方式
[0058]
应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
[0059]
参照图1,本发明提供一种空天地视频传感器协同规划方法,包括:
[0060]
s1:获取路网数据,对所述路网数据进行预处理,获得待监视路网,通过所述待监视路网确定监视任务时间;
[0061]
s2:获取空天地视频传感器,通过所述空天地视频传感器的覆盖特征,确定所述空天地视频传感器的有效覆盖范围;
[0062]
s3:获取所述空天地视频传感器的监视位置,包括:视频卫星覆盖条带、无人机悬停点和地面应急临时相机布设点;
[0063]
s4:通过所述待监视路网、所述有效覆盖范围和所述监视位置,构建空天地视频传感器协同规划模型,通过所述空天地视频传感器协同规划模型求解空天地协同应急方案。
[0064]
具体实现中,以武汉市武汉西收费站周围路网为应急监视路网,该目标路网是以武汉西收费站为关键节点向外延伸10km路网距离的路网;武汉是中国最拥挤的城市之一,交通拥堵等交通问题严重;武汉西收费站则是武汉市重要的交通节点,日常车流量大,对于武汉市对外交通有着重要意义,需要提供高效的交通监视,及时发现并响应恶劣天气下的交通异常事件,保障道路通畅和居民出行;
[0065]
本实例选择2022年3月10日8:40至9:40间的60分钟作为单次应急监视任务的监视任务时间;假设可用视频卫星3颗,可调度的无人机共10台,地面应急临时相机共20台;空天地视频资源需要在观测时间内尽可能多地收集待监视路段的交通信息。
[0066]
本实施例中,步骤s1具体为:
[0067]
s11:对所述路网数据进行矢量化的抽象表达,以多段线表征所述路网数据的路网物理形态,获得矢量化的路网数据;
[0068]
s12:按照一定间隔长度对所述矢量化的路网数据进行离散化操作,获得所述待监视路网;所述待监视路网包括若干长度相同的子路段,用以表征空天地视频传感器的观测对象;
[0069]
s13:根据监视任务确定所述待监视路网的监视任务时间。
[0070]
具体实现中,针对武汉西收费站周围路网进行矢量化抽象表达,以多段线(polyline) 表征该路网物理形态,获得的矢量化的路网数据如图2所示;
[0071]
按照一定间隔长度离散化矢量路网,得到若干长度相同的子路段,表征空天地视频设备的观测对象,并确定监视任务时间;本实施例中以50米为间隔长度对图2路网进行离散化处理,并选择2022年3月10日8:40至9:40间的60分钟作为单次应急监视任务的监视任务时间。
[0072]
本实施例中,步骤s2具体为:
[0073]
s21:所述空天地视频传感器包括:视频卫星、无人机和地面应急临时相机;
[0074]
s22:获取当前在轨的视频卫星集合,通过sgp4模型计算各视频卫星的卫星轨道,获得各视频卫星的轨道高度,结合视频传感器幅宽参数,计算获得各视频卫星的对地覆盖范围;
[0075]
具体的,获取当前可用视频卫星3颗,其参数如表1所示;使用sgp4模型计算各个卫星的卫星轨道,并使用卫星条带仿真软件stk内置算法,计算得到单个视频卫星条带的对地覆盖范围;
[0076]
表1.任务可用视频卫星参数
次视频数据;通过当前资源数量,设置视频卫星数量约束、无人机数量约束和地面应急临时相机数量约束;本实施例中假定现有的视频卫星数量为3,无人机数量为10,地面应急临时相机数量为20;
[0091]
s43:通过所述约束条件和所述路网覆盖长度构建所述空天地视频传感器协同规划模型;具体的,所述空天地视频传感器协同规划模型的表达式为:
[0092][0093][0094][0095][0096][0097][0098][0099][0100][0101][0102][0103][0104]
其中,z为目标函数;i表示需求对象的编号,i为需求对象集合;j表示地面应急临时相机布设点的编号,j为地面应急临时相机布设点集合;k表示视频卫星的编号,k为视频卫星集合;l为无人机悬停点的编号,l为无人机悬停点集合;rk表示视频卫星k的视频卫星覆盖条带,r为视频卫星覆盖条带集合;qk表示视频卫星k是否被用于获取路网数据,是则取值为1,否则为0;yi表示需求对象i是否被覆盖,是则取值为1,否则为0;xj表示地面应急临时相机是否在布设点位j被布设,是则取值为1,否则为0;z
l
表示无人机是否在悬停点l被布设,是则取值为1,否则为0;表示视频卫星覆盖条带rk是否被用于获取路网数据,是则取值为1,否则为0;wi表示需求对象i的权重值,本实施例中使用子路段长度作为权重值;ni表示能够覆盖需求对象i的所有地面应急临时相机布设点的集合; mi表示能够覆盖需求对象i的所有视频卫星覆盖条带的集合;vi表示能够覆盖需求对象i 的所有无人机悬停点的集合;p表示地面应急临时相机的总数量,在本实施例中取20;b 表示待使用视频卫星的总数量,在本实施例中取3;d表示待使用无人机的总数量,在本实施例中取10;
[0105]
s44:通过分支切面算法求解所述空天地视频传感器协同规划模型的最优解,将所述最优解作为所述空天地协同应急方案。
[0106]
具体实现中,使用商业软件cplex内置的分支切面算法求解所述模型最优解,求得空天地协同应急方案如图4所示,其路网覆盖率,即(目标函数值/路网总长度)
×
100%,为90.23%;同时使用最大覆盖模型求解仅调度无人机覆盖路网的部署结果,如图5、图6 所示;图5为单一规划现有10架无人机资源的覆盖结果,其路网覆盖率仅为33.27%;图 6为单一规划无人机达到与空天地协同结果相同覆盖率时的覆盖结果,其路网覆盖率为 90.56%,但其所需的机载传感器数量是协同方法下的4倍,现实中受成本约束,难以实现此数量下的路网覆盖率;因此,相比于单一平台规划结果,空天地视频传感器协同规划能够更好地利用现有各平台传感器资源,有利于高效获取应急场景下的交通信息;表2为空天地协同规划方法与单一平台规划方法的结果对比。
[0107]
表2.空天地协同规划结果与单一平台规划结果对比
[0108]
规划方法无人机使用数量路网覆盖率空天地协同规划1090.23%同等数量无人机单一平台规划1033.27%同等覆盖率无人机单一平台规划4390.56%
[0109]
本发明提供一种空天地视频传感器协同规划系统,包括:
[0110]
待监视路网获取模块,用于获取路网数据,对所述路网数据进行预处理,获得待监视路网,通过所述待监视路网确定监视任务时间;
[0111]
有效覆盖范围计算模块,用于获取空天地视频传感器,通过所述空天地视频传感器的覆盖特征,确定所述空天地视频传感器的有效覆盖范围;
[0112]
监视位置获取模块,用于获取所述空天地视频传感器的监视位置,包括:视频卫星覆盖条带、无人机悬停点和地面应急临时相机布设点;
[0113]
空天地协同应急方案获取模块,用于通过所述待监视路网、所述有效覆盖范围和所述监视位置,构建空天地视频传感器协同规划模型,通过所述空天地视频传感器协同规划模型求解空天地协同应急方案。
[0114]
需要说明的是,在本文中,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者系统不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者系统所固有的要素。在没有更多限制的情况下,由语句“包括一个
……”
限定的要素,并不排除在包括该要素的过程、方法、物品或者系统中还存在另外的相同要素。
[0115]
上述本发明实施例序号仅仅为了描述,不代表实施例的优劣。在列举了若干装置的单元权利要求中,这些装置中的若干个可以是通过同一个硬件项来具体体现。词语第一、第二、以及第三等的使用不表示任何顺序,可将这些词语解释为标识。
[0116]
以上仅为本发明的优选实施例,并非因此限制本发明的专利范围,凡是利用本发明说明书及附图内容所作的等效结构或等效流程变换,或直接或间接运用在其他相关的技术领域,均同理包括在本发明的专利保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。