技术特征:
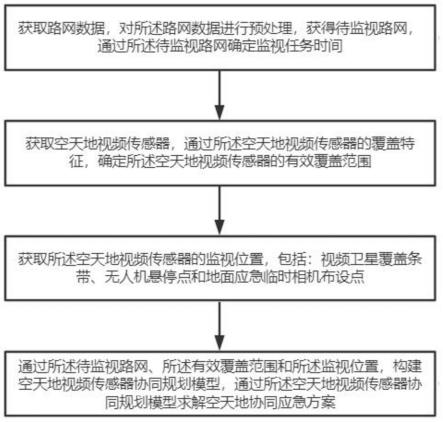
1.一种空天地视频传感器协同规划方法,其特征在于,包括:s1:获取路网数据,对所述路网数据进行预处理,获得待监视路网,通过所述待监视路网确定监视任务时间;s2:获取空天地视频传感器,通过所述空天地视频传感器的覆盖特征,确定所述空天地视频传感器的有效覆盖范围;s3:获取所述空天地视频传感器的监视位置,包括:视频卫星覆盖条带、无人机悬停点和地面应急临时相机布设点;s4:通过所述待监视路网、所述有效覆盖范围和所述监视位置,构建空天地视频传感器协同规划模型,通过所述空天地视频传感器协同规划模型求解空天地协同应急方案。2.根据权利要求1所述的空天地视频传感器协同规划方法,其特征在于,步骤s1具体为:s11:对所述路网数据进行矢量化的抽象表达,以多段线表征所述路网数据的路网物理形态,获得矢量化的路网数据;s12:按照一定间隔长度对所述矢量化的路网数据进行离散化操作,获得所述待监视路网;所述待监视路网包括若干长度相同的子路段,用以表征空天地视频传感器的观测对象;s13:根据监视任务确定所述待监视路网的监视任务时间。3.根据权利要求1所述的空天地视频传感器协同规划方法,其特征在于,步骤s2具体为:s21:所述空天地视频传感器包括:视频卫星、无人机和地面应急临时相机;s22:获取当前在轨的视频卫星集合,通过sgp4模型计算各视频卫星的卫星轨道,获得各视频卫星的轨道高度,结合视频传感器幅宽参数,计算获得各视频卫星的对地覆盖范围;s23:获取当前可调度的无人机集合,将各无人机的对地覆盖范围抽象为圆,根据各无人机机载视频镜头的视域和无人机悬停高度,使用正切三角函数公式,计算获得各无人机的对地覆盖范围;s24:获取当前可用的地面应急临时相机集合,根据各地面应急临时相机的视域参数及布设高度,计算获得各地面应急临时相机的覆盖范围;s25:由各所述视频卫星的对地覆盖范围、各所述无人机的对地覆盖范围和各所述地面应急临时相机的覆盖范围,组成所述空天地视频传感器的有效覆盖范围。4.根据权利要求1所述的空天地视频传感器协同规划方法,其特征在于,步骤s3具体为:s31:根据视频卫星的敏捷性特征,获取视频卫星的侧摆角范围,在侧摆角范围中选取多个侧摆角度值;针对各侧摆角度值,基于所述监视任务时间,进行面向所述待监视路网的视频卫星条带仿真,获取多个视频卫星条带;对各所述视频卫星条带沿视频卫星的前进方向进行等间距划分,获得多个符合视频卫星幅宽的方形矢量数据,通过所述方形矢量数据表征所述视频卫星覆盖条带;s32:按照预设的时间间隔,使用等距离取点方法,获取所述待监视路网上的等距离点集,通过所述等距离点集表征所述无人机悬停点和所述地面应急临时相机布设点,所述无人机悬停点和所述地面应急临时相机布设点的位置相同。5.根据权利要求1所述的空天地视频传感器协同规划方法,其特征在于,步骤s4具体
为:s41:根据观测需求,确定所述空天地视频传感器协同规划模型的路网覆盖长度;s42:设置约束条件,具体包括:通过所述有效覆盖范围和所述监视位置,确定空天地视频传感器的协同覆盖关系约束;通过视频卫星的成像特点,确定视频卫星的成像次数约束;通过当前资源数量,设置视频卫星数量约束、无人机数量约束和地面应急临时相机数量约束;s43:通过所述约束条件和所述路网覆盖长度构建所述空天地视频传感器协同规划模型;s44:通过分支切面算法求解所述空天地视频传感器协同规划模型的最优解,将所述最优解作为所述空天地协同应急方案。6.根据权利要求5所述的空天地视频传感器协同规划方法,其特征在于,所述空天地视频传感器协同规划模型的表达式为:频传感器协同规划模型的表达式为:频传感器协同规划模型的表达式为:频传感器协同规划模型的表达式为:频传感器协同规划模型的表达式为:频传感器协同规划模型的表达式为:频传感器协同规划模型的表达式为:频传感器协同规划模型的表达式为:频传感器协同规划模型的表达式为:频传感器协同规划模型的表达式为:频传感器协同规划模型的表达式为:频传感器协同规划模型的表达式为:其中,z为目标函数;i表示需求对象的编号,i为需求对象集合;j表示地面应急临时相机布设点的编号,j为地面应急临时相机布设点集合;k表示视频卫星的编号,k为视频卫星集合;l为无人机悬停点的编号,l为无人机悬停点集合;r
k
表示视频卫星k的视频卫星覆盖条带,r为视频卫星覆盖条带集合;q
k
表示视频卫星k是否被用于获取路网数据,是则取值为1,否则为0;y
i
表示需求对象i是否被覆盖,是则取值为1,否则为0;x
j
表示地面应急临时相机是否在布设点位j被布设,是则取值为1,否则为0;z
l
表示无人机是否在悬停点l被布设,是则取值为1,否则为0;u
rk
表示视频卫星覆盖条带r
k
是否被用于获取路网数据,是则取值为1,
否则为0;w
i
表示需求对象i的权重值;n
i
表示能够覆盖需求对象i的所有地面应急临时相机布设点的集合;m
i
表示能够覆盖需求对象i的所有视频卫星覆盖条带的集合;v
i
表示能够覆盖需求对象i的所有无人机悬停点的集合;p表示地面应急临时相机的总数量;b表示待使用视频卫星的总数量;d表示待使用无人机的总数量。7.一种空天地视频传感器协同规划系统,其特征在于,包括:待监视路网获取模块,用于获取路网数据,对所述路网数据进行预处理,获得待监视路网,通过所述待监视路网确定监视任务时间;有效覆盖范围计算模块,用于获取空天地视频传感器,通过所述空天地视频传感器的覆盖特征,确定所述空天地视频传感器的有效覆盖范围;监视位置获取模块,用于获取所述空天地视频传感器的监视位置,包括:视频卫星覆盖条带、无人机悬停点和地面应急临时相机布设点;空天地协同应急方案获取模块,用于通过所述待监视路网、所述有效覆盖范围和所述监视位置,构建空天地视频传感器协同规划模型,通过所述空天地视频传感器协同规划模型求解空天地协同应急方案。
技术总结
本发明涉及地理信息服务技术领域,提供一种空天地视频传感器协同规划方法及系统,包括:S1:获取路网数据,对路网数据进行预处理,获得待监视路网,通过待监视路网确定监视任务时间;S2:获取空天地视频传感器,通过空天地视频传感器的覆盖特征,确定空天地视频传感器的有效覆盖范围;S3:获取空天地视频传感器的监视位置,包括:视频卫星覆盖条带、无人机悬停点和地面应急临时相机布设点;S4:通过待监视路网、有效覆盖范围和监视位置,构建空天地视频传感器协同规划模型,通过空天地视频传感器协同规划模型求解空天地协同应急方案。本发明可以得到满足应急交通监视任务需求的最优空天地视频传感器部署方案,高效地进行应急路网交通状况监视。通状况监视。通状况监视。
技术研发人员:王珂 吴倩倩 钟艺 胡楚丽
受保护的技术使用者:中国地质大学(武汉)
技术研发日:2022.05.23
技术公布日:2022/8/30
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。