1.本发明属于有源噪声控制的技术领域,具体涉及一种跟踪抑制自适应反馈有源控制系统水床效应的方法。
背景技术:
2.有源噪声控制(active noise control, anc)已广泛应用于有源降噪耳机、汽车有源降噪、降低机器噪声、有源声屏障和降低室内噪声等场合,在人机交互场合也有应用前景,如降低机器人使用环境的噪声,提高其识别语音的能力。
3.有源噪声控制结构可分为前馈有源噪声控制和反馈有源噪声控制,其中前者性能依赖于参考信号与初级噪声信号之间的相干性。在许多anc系统的应用场景中,无法获取高质量的参考信号,降噪性能弱或无法降噪,可使用反馈有源控制系统。然而反馈系统存在“水床”效应,即在某特定频段降噪的同时会引起其他频段噪声放大。
4.针对该问题,一种常用方法为使用离线算法设计控制滤波器,水床效应引起的噪声放大作为约束条件在离线算法设计中进行考虑。如rafaely等提出用h2/h
∞
设计方法(b. rafaely and s. j. elliott,
ꢀ“
h2/h
∞
active control of sound in a headrest: design and implementation,
”ꢀ
ieee t. contr. syst. t. 7(1), 79-84 (1999)),构造以“水床”抑制和鲁棒稳定性为约束条件的凸优化问题,再使用序列二次规划算法求解最优滤波器,得到满足约束条件且有效降噪的控制滤波器。如zhang提出一种不需要复杂权重参数选择和优化的数值求解算法,通过尽量展宽噪声放大频段和均匀噪声放大频段内噪声放大量的方法,将噪声放大峰值限制于给定的限值来改善“水床”效应(l. zhang, l. wu, and x. qiu,
ꢀ“
an intuitive approach for feedback active noise controller design,
”ꢀ
appl. acoust. 74(1), 160-168 (2013))。然而这些算法不适用于实时自适应系统。在实时自适应反馈系统中,一般采用内模控制(imc)结构,使用基本的滤波-x最小均方(fxlms)算法来计算控制滤波器,由于“水床”效应可能引起某些频段出现较大的噪声放大。使用泄漏滤波-x最小均方(lfxlms)算法可降低全频段输出信号的大小,可实现“水床”抑制,然而该算法仅能对全频段控制滤波器以相同权重约束。广义泄漏滤波-x最小均方(glfxlms)算法(l. wu, x. qiu, and y. guo,
ꢀ“
a generalized leaky fxlms algorithm for tuning the waterbed effect of feedback active noise control systems,
”ꢀ
mech. syst. signal. pr. 106, 13-23 (2018))和频段约束滤波-x最小均方(fcfxlms)算法(c. zhou, h. zou, and x. qiu,
ꢀ“
a frequency band constrained filtered
–
x least mean square algorithm for feedback active control systems,
”ꢀ
j acoust soc am, 148(4), 1947-1951 (2020))可通过对特定频段的控制滤波器幅值抑制来抑制水床效应引起的噪声放大,降噪效果较lfxlms算法为高。然而这两种算法均需要预先知道“水床”出现的频段,当噪声频谱变化时,这两种算法均无法实时约束新出现的“水床”。
5.申请人于2020年10月15日,提交的一份专利申请,公开了一种自适应反馈有源控制系统水床效应抑制的方法,其包括(1)次级路径建模;(2)设计频谱整形滤波器幅频响应,
并计算其单位冲激响应;(3)将白噪声经过频谱整形滤波器滤波得到信号a(n);(4)将信号a(n)经过控制滤波器滤波,得到信号b(n);(5)使用误差传感器所拾取的误差信号e(n)减去馈给次级声源的控制信号y(n)经次级路径模型滤波后的信号合成参考信号x(n);(6)根据迭代公式对控制滤波器系数迭代;(7)不断迭代控制滤波器系数,使得代价函数最小,本发明能够在自适应系统中抑制反馈有源控制系统因水床效应引起的噪声放大,并且计算量小,但是该技术不能解决水床效应引起的噪声放大频段相应变化时,如何跟踪并抑制由水床效应产生的噪声。
6.基于此,有必要针对反馈有源噪声控制系统,提供一种当噪声频谱变化,水床效应引起的噪声放大频段相应变化时,可实时跟踪并抑制由水床效应产生的噪声放大的算法。
技术实现要素:
7.发明目的:为了克服现有技术中存在的不足,本发明提供一种跟踪抑制自适应反馈有源控制系统水床效应的方法,该方法可实时踪并抑制由“水床”效应产生的噪声放大且无需预先知道“水床”出现的位置。
8.技术方案:为实现上述目的,本发明采用的技术方案为:一种跟踪抑制自适应反馈有源控制系统水床效应的方法,包括如下步骤:步骤1,测量有源控制系统次级路径传递函数单位冲激响应,得到次级路径估计函数,为复变量。
9.步骤2,使用误差传感器所拾取的误差信号e(n)减去馈给次级声源的控制信号y(n)经次级路径估计函数滤波后得到参考信号x(n) ,,为时间索引,m为次级路径单位冲激响应阶数。
10.步骤3,通过参考信号x(n) 计算滤波-x信号,,其中,为滤波-x信号,,为控制滤波器的长度,t为转置符号。
11.步骤4,对初始噪声p(n)进行线性预测获得初始噪声的白化滤波器f(z)。
12.步骤5,将误差信号e(n)经过白化滤波器f(z)滤波得到滤波-e信号e'(n)。
13.步骤6,将滤波-x信号r(n)经过白化滤波器f(z)滤波得到滤波-r信号r'(n),。
14.步骤7,通过迭代公式更新控制滤波器系数w(n),迭代公式:其中,μ为迭代步长,α为约束水床效应的权重因子,γ=1
−
2μβ,β为约束控制滤波器输出的权重因子。
15.步骤8,不断迭代控制滤波器系数w(n),使得代价函数最小,代价函数:
其中,为代价函数值,为期望计算,p(n) 为初始噪声,p'(n)为初始噪声经过白化滤波器f(z)滤波后的信号,r为滤波-x信号r(n) 自相关矩阵,r'为滤波-r信号r'(n)的自相关矩阵,p为p(n)和r(n)的互相关向量,p'为p'(n)和r'(n)的互相关向量,i为单位矩阵,为控制滤波器系数简写。
16.优选的:对灵敏度幅值约束使用变权重因子:其中,α为约束水床效应的权重因子,α0为非负常,n为mfblms算法中块长度,为自适应线性预测过程第k个块中的误差向量。
17.优选的:自适应线性预测过程第k个块中的误差向量:其中,表示数据块序号。
18.优选的:p(n)和r(n)的互相关向量p:式中,p为p(n)和r(n)的互相关向量。
19.优选的:初始噪声信号经过白化滤波器f(ω)滤波后的信号:式中p'(n)为初始噪声信号经过白化滤波器f(ω)滤波后的信号。
20.优选的:滤波-r信号:式中,r'(n)表示滤波-r信号。
21.优选的:滤波-x信号r(n) 的自相关矩阵:式中,r为滤波-x信号r(n) 的自相关矩阵。
22.优选的:p'(n)和r'(n)的互相关向量:式中,p'为p'(n)和r'(n)的互相关向量。
23.优选的:滤波-r信号r'(n)的自相关矩阵:式中,r'为滤波-r信号r'(n)的自相关矩阵。
24.本发明相比现有技术,具有以下有益效果:(1)本发明提出的方法与非自适应滤波器设计方法相比,可用于实时自适应系统。
25.(2)本发明与lfxlms算法相比,并没有限制所有频段的控制滤波器幅值,仅对噪声放大的频段进行水床抑制,降噪效果更好。
26.(3)本发明与glfxlms算法和fcfxlms算法相比,当噪声频谱变化导致系统水床效
应引起的噪声放大频段变化时,可实时跟踪并抑制由水床效应产生的噪声放大,无需预先知道“水床”出现的频段,算法可应用范围更广。
附图说明
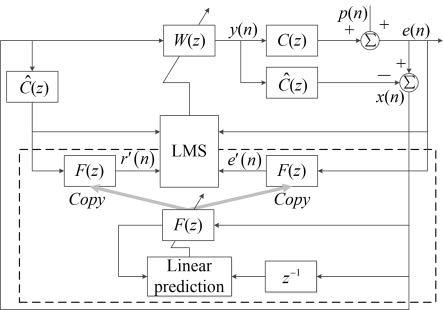
27.图1是本发明框图。
28.图2是本发明实施例中白化滤波器幅频响应。
29.图3是本发明在噪声信号不变且次级路径不变的情况下,与传统fxlms算法和lfxlms算法降噪前后噪声信号功率谱密度对比图。
30.图4是本发明与传统fxlms算法和lfxlms算法稳态滤波器幅频响应对比图。
31.图5是有源降噪头靠系统中头与躯干模型不同移动情况的示意图。
32.图6是本发明在噪声信号变化的情况下,与传统fxlms算法和lfxlms算法降噪前后噪声信号功率谱密度对比图。
33.图7是本发明在噪声信号变化的情况下,白化滤波器和控制滤波器mse收敛曲线图。
具体实施方式
34.下面结合附图和具体实施例,进一步阐明本发明,应理解这些实例仅用于说明本发明而不用于限制本发明的范围,在阅读了本发明之后,本领域技术人员对本发明的各种等价形式的修改均落于本技术所附权利要求所限定的范围。
35.一种跟踪抑制自适应反馈有源控制系统水床效应的方法,如图1所示,包括如下步骤:步骤1,测量有源控制系统次级路径传递函数单位冲激响应,得到次级路径估计函数,为复变量。
36.步骤2,使用误差传感器所拾取的误差信号e(n)减去馈给次级声源的控制信号y(n)得到初始噪声p(n),初始噪声p(n)经次级路径估计函数滤波后得到参考信号x(n) ,其中,,为时间索引,m为次级路径单位冲激响应阶数。
37.步骤3,通过参考信号x(n) 计算滤波-x信号,,其中,为滤波-x信号,,为控制滤波器的长度,t为转置符号。
38.步骤4,对初始噪声p(n)进行线性预测获得初始噪声的白化滤波器f(z)。
39.步骤5,将误差信号e(n)经过白化滤波器f(z)滤波得到滤波-e信号e'(n)。
40.步骤6,将滤波-x信号r(n)经过白化滤波器f(z)滤波得到滤波-r信号r'(n),。
41.步骤7,通过迭代公式更新控制滤波器系数w(n),迭代公式:
其中,μ为迭代步长,α为约束水床效应的权重因子,γ=1
−
2μβ,β为约束控制滤波器输出的权重因子。
42.步骤8,不断迭代控制滤波器系数w(n),使得代价函数最小,代价函数:其中,为代价函数值,为期望计算,p(n) 为初始噪声,p'(n)为初始噪声经过白化滤波器f(z)滤波后的信号,r为滤波-x信号r(n) 自相关矩阵,r'为滤波-r信号r'(n)的自相关矩阵,p为p(n)和r(n)的互相关向量,p'为p'(n)和r'(n)的互相关向量,为控制滤波器系数简写。
43.图1中虚线框外部为基于内模控制的反馈anc系统的fxlms算法(以下称基本算法)框图,本发明算法在基本算法上进行了改进,如虚线框内所示。
44.图1中虚线框外部e(n)为误差信号,y(n)为参考信号x(n)经过控制滤波器w(z)后输出给次级源的信号,y(n)经过次级路径c(z)与初始噪声信号p(n)叠加得到误差信号e(n),为次级路径函数c(z)的估计函数,参考信号x(n)为初始噪声信号的估计,它由误差信号e(n)和减去馈给次级源的y(n)经过滤波后的信号得到。
45.虚线框内部f(z)为初始噪声p(n)的白化滤波器,e'(n)为误差信号e(n)经过白化滤波器f(z)滤波后的信号,称为滤波-e信号;r(n)为参考信号x(n)经滤波后得到的滤波-x信号,r'(n)为滤波-x信号r(n)经白化滤波器f(z)滤波得到滤波-r信号。白化滤波器f(z)的系数f(n)可通过对初始噪声信号p(n)线性预测(linear)获得,实现线性预测的方法有很多,例如可使用频域块lms(frequency-domain block least mean square, mfblms)算法或改进的频域块lms算法来实现。
46.由图1所示,本发明的代价函数的时域形式为:
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(1)e(n)的表达式为:
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(2)其中,为滤波-x信号向量,为滤波-x信号,为参考信号向量,l为控制滤波器的长度, m为次级路径估计单位冲激响应的长度。
47.e'(n)的表达式为:
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(3)其中,f(n)为白化滤波器f(z)的滤波器系数,*代表卷积运算。
48.设p
p
(ω)为初始噪声的功率谱密度,f(ω)为初始噪声p(n)的白化滤波器频响,即:
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(4)根据维纳-辛钦定理,式(1)表示的代价函数的频域形式为:
ꢀꢀꢀ
(5)已知反馈anc系统灵敏度函数定义为,e(ω) 代表误差噪声信号e(n),p(ω) 代表初始噪声p(n)的傅里叶变换,为误差信号e(n)的功率谱密度,为初始噪声信号p(n)的功率谱密度,当时噪声放大,即表示“水床效应”带来了噪声放大,时则噪声衰减。
49.将和式(4)代入式(5),代价函数的频域形式变化为:
ꢀꢀꢀꢀ
(6)可见该代价函数中括号里第二项能对反馈anc系统灵敏度函数幅值进行约束,降低的大小,通过设置合适权重因子α,在不影响降噪性能的情况下可抑制“水床”效应引起的噪声放大。代价函数中括号里第三项对反馈anc系统控制滤波器幅值进行约束,类似lfxlms算法,不同之处在于,在本发明中该项的作用并不用于约束水床效应,而为确保系统收敛的稳定性,故所用的权重因子β远小于lfxlms算法。
50.将式(2)和式(3)代入式(1),得:
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(7)式中,p'(n)为初始噪声信号经过白化滤波器f(ω)滤波后的信号,i为单位矩阵,r和r'分别为滤波-x信号r(n)和滤波-r信号r'(n)的自相关矩阵,p为p(n)和r(n)的互相关向量,p'为p'(n)和r'(n)的互相关向量,分别定义如下:
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(8)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(9)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(10)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(11)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(12)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(13)根据式(7)可知代价函数j是关于控制滤波器系数w(n)的凸函数,故存在全局最优解,式(1)的瞬时梯度为:
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(14)根据随机梯度下降法,控制滤波器系数的迭代公式为:
ꢀꢀꢀꢀꢀ
(15)其中,为瞬时梯度,μ为迭代步长,γ=1
−
2μβ。
51.本发明对误差信号进行了滤波,可实现对反馈anc系统灵敏度函数约束,以下称其为灵敏度约束felms(sensitivity constrained filtered-e least mean square)算法,简称scfelms算法。
52.所述白化滤波器系数f(n)可通过对初始噪声信号p(n)线性预测获得,预测速度和精度对算法性能会有影响。下面举例说明如何通过线性预测获得f(n)。一种公开的改进频域块lms算法(j. lu, x. qiu, and h. zou,
ꢀ“
a modified frequency-domain block lms algorithm with guaranteed optimal steady-state performance,
”ꢀ
signal processing. 104, 27-32 (2014))可在非因果的情况下收敛至维纳解,本例采用该算法对白化滤波器系数f(n)自适应迭代,即将白化滤波器系数的实时更新过程内嵌至所提算法中,使得本发明算法在噪声频谱特征发生变化时,可自适应更新白化滤波器以及控制滤波器。在f(n)的自适应迭代过程中,线性预测的误差由大到小,最终达到平稳,若保持权重因子α不变,在迭代的初始阶段,由于f(n)不准确,算法有发散的风险。本发明实施例对灵敏度幅值约束使用变权重因子,定义如下:
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(16)其中,α为约束水床效应的权重因子,α0为非负常,n为mfblms算法中块长度,为自适应线性预测过程第k个块中的误差向量。
53.自适应线性预测过程第k个块中的误差向量:其中,表示数据块序号。
54.式(16)所示变权重因子可使得在白化滤波器未收敛的过程中,对e'(n)信号以较小的权重约束,从而保证本发明的稳定性。当白化滤波器收敛后,式(16)所示权重因子的值保持稳定,从而保证本发明的性能。
55.下面以有源降噪头靠系统为例说明本发明的效果,有源降噪头靠系统一般布置在人耳附近,使用扬声器作为次级声源,通过降低人耳附近误差传声器的噪声,在人耳附近产生静区。每只耳朵使用一个控制通道,包含一个次级声源和一个误差传声器,误差传声器距离次级声源振膜中心8 cm。2只耳朵共2个通道,一般而言,有源降噪头靠系统的2个通道耦合较弱,每一通道可视为单通道系统。有源降噪头靠系统通常用于降低低频噪声,应用反馈自适应有源控制算法时,中高频段由于水床效应会出现噪声放大。若水床不进行约束,可能在某些频段出现较高的水床,引起较大的噪声放大,影响听感。可使用上述步骤1-8来实现本发明,跟踪并抑制由水床效应产生的噪声放大。
56.为了说明本发明方法的性能,以下利用仿真对传统的fxlms算法、lfxlms算法和本发明提出的scfelms算法的稳态性能进行比较验证。使用上述有源降噪头靠系统实测的传递函数进行仿真,使用一个音箱作为初级声源,初级噪声为方差为10
-10
的白噪声经过一个
传递函数为h(z) = [(1
−
2z
−2 z
−4)/(1
−
3.91z
−1 5.76z
−2−
3.79z
−3 0.94z
−4)]的带通滤波器滤波后的信号。自适应控制滤波器长度l = 512,白化滤波器长度为513,mfblms算法中块长度n和迭代步长分别为513和1.1
×
10
−4,常数权重因子α0和β分别为2.6和1.0,控制滤波器迭代步长μ为6.0
×
10
−8。对比算法lfxlms对滤波器系数的约束权重设置为2.0
×
102,其值为scfelms算法对滤波器约束权重的200倍,由此可知scfelms算法主要体现的是式(6)代价函数中括号里第二项对系统灵敏度函数幅值的约束,而不是对滤波器幅值的约束。仿真中假设次级路径模型估计准确,即等于c(z)。采样率设为16 khz。
[0057]
scfelms算法中收敛后的白化滤波器f(ω)的幅频响应如图2所示。图3给出降噪前后噪声信号的功率谱密度,并与fxlms算法和lfxlms算法降噪后的结果进行对比。图例中“primary”代表降噪前的噪声信号。虽然使用fxlms算法可获得最大的降噪量18.6 db,但在100 hz以下和1000 hz以上的频段产生了较大的噪声放大,其全频段内噪声放大的峰值为10.8 db。使用lfxlms算法和scfelms算法均可有效抑制噪声放大,但降噪量均有所减小,其具体数值如表1所示。各算法收敛后的控制滤波器的幅频响应如图4所示。lfxlms算法通过抑制全频段控制滤波器的幅值以减小由“水床”效应产生的噪声放大,获得的降噪量为9.0 db,全频段内噪声放大峰值为4.4 db,其收敛后控制滤波器的幅频响应如图4叉号标记线所示。scfelms算法直接约束灵敏度函数以减小噪声放大,全频段降噪量为12.0 db,噪声放大峰值为4.2 db,其收敛后控制滤波器的幅频响应如图4红色实线所示。
[0058]
表1 噪声不变及次级路径不变时,不同算法的降噪量和噪声放大峰值当不等于c(z)时,imc中合成的参考信号不再是初级噪声信号的准确估计,因此scfelms算法中白化滤波器的估计会存在一定误差。图5给出头与躯干模型(下称人工头)在头靠系统中间(状态1),人工头右移5 cm(状态2),人工头左移5 cm(状态3)和无人工头(状态4)这4种不同情况下的有源头靠系统布放示意图。通过测量这4种不同情况下左侧次级源到左侧误差传声器间的次级路径传递函数来分析scfelms算法在次级路径变化情况下的性能。
[0059]
以图5中人头位于系统中间时(状态1)的次级路径传递函数为scfelms算法中的次级路径模型,以这4种情况的次级路径为真实次级路径来计算scfelms算法的降噪效果以模拟实际有源头靠系统中次级路径变化的情况,由表2可见,当次级路径变化后,scfelms算法的降噪量基本没有变化,其范围为12.0 db至12.2 db。噪声放大峰值相对于变化前有所增大,其范围为4.2 db至5.3 db。可见对于次级路径变化的情况,本发明算法有较好的鲁棒性。
[0060]
表2 次级路径变化时scfelms算法的降噪量和噪声放大峰值
本发明所提scfelms算法中内嵌有白化滤波器系数的实时更新过程,故其在噪声变化时可实时更新白化滤波器系数和控制滤波器系数,进而跟踪并抑制由水床效应产生的噪声放大。下面分析噪声频谱变化后scfelms算法的性能。设置噪声在100 s后由中心频率为300 hz且噪声能量主要集中于200 ~ 450 hz的噪声变化为中心频率为200 hz且噪声能量集中于90 ~ 400 hz的噪声,噪声信号总时长200 s。噪声变化前后的功率谱密度分别如图6中黑色圆形标记线和蓝色三角形标记线所示。仿真中的参数设置与前文一致。scfelms算法中白化滤波器更新和控制滤波器更新的归一化mse收敛曲线分别如图7蓝色虚线和红色实线所示,图中0 s至100 s的mse曲线以噪声变化前的噪声信号均方值为归一化因子,100 s至200 s的mse曲线以噪声变化后的噪声信号均方值为归一化因子。在0 s至100 s噪声频谱变化前,白化滤波器mse和控制滤波器迭代mse均收敛了。在100 s至101 s时噪声频谱变化,白化滤波器迭代mse和控制滤波器迭代mse均有所提升,随后逐渐下降,随后也均收敛了。
[0061]
图6为统计195 s至200 s降噪前后噪声信号的功率谱密度,图中黑色圆形标记线代表噪声变化前的噪声信号,蓝色三角标记线代表噪声变化后的噪声信号。绿色叉号标记线,紫色方形标记线和红色实线分别代表fxlms算法,lfxlms算法和scfelms算法降噪后噪声信号的功率谱密度。噪声变化后,各算法195 s至200 s降噪量和噪声放大峰值如表3所示。fxlms算法可获得各算法中最大的19.3 db降噪量,但其在1000 hz至2500 hz频段内有较大的噪声放大,其中1527 hz处的噪声放大值为10.8 db。lfxlms算法和scfelms算法均可在噪声变化后跟踪约束由“水床”效应产生的噪声放大,lfxlms通过约束全频段控制滤波器的幅值,可将噪声放大峰值降至7.0 db,降噪也因此降至11.9 db。scfelms算法通过实时约束灵敏度函数幅值,可将噪声放大峰值降至7.0 db,降噪量为15.0 db。
[0062]
由此可见当噪声频谱变化时,通过mfblms算法进行线性预测自适应更新白化滤波器系数,scfelms算法可实时更新对灵敏度函数幅值的约束,与lfxlms算法噪声放大峰值相当,但提高了降噪量。
[0063]
表3 噪声频谱变化后,不同算法的稳态降噪量和噪声放大峰值以上所述仅是本发明的优选实施方式,应当指出:对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。