joint)进行支承而评价了连续梁。因而,将在连续梁的长度方向的中央产生的弯矩、挠度分布评价得过大。由此,判断为需要将与长度方向正交的截面大的梁用作连续梁,使用了价格高于所需的连续梁。
18.鉴于这样的问题点,存在如下的第1课题,即,提供一种能够根据两端处的接合状态更加合适地评价连续梁的弯矩、挠度分布的连续梁的评价方法及连续梁的评价程序。
19.另一方面,对在组合梁上遍及全长地作用有等分布荷载的情况进行说明。在该情况下,该方程式为隐函数,所以,为了根据关于组合梁的弯矩及挠度的方程式算出组合梁的弯矩及挠度,需要进行收敛(收拢)计算。而且,例如为了对具有多个组合梁的构造体进行动态解析,需要利用隐式解法通过收敛计算来对其进行求解。由于需要组合梁和构造体的双重的收敛计算,所以需要大量的时间。
20.进而,对例如将组合梁的截面积设为目的函数,将挠度、弯矩等设计条件设为限制条件,进行将目的函数最小化的最优化计算的情况进行说明。在该情况下,由于针对限制条件及目的函数的最优化需要进行双重的收敛计算,所以需要大量的时间。
21.鉴于这样的问题点,存在如下的第2课题,即,提供一种不进行收敛计算就能够算出组合梁的端部弯矩及挠度的最大值的组合梁的评价方法。
22.本发明是鉴于所述第1课题及所述第2课题而做出的,其目的在于,提供一种能够合适地评价挠度的连续梁的评价方法、连续梁的评价程序及组合梁的评价方法。
23.用于解决课题的技术方案
24.为了解决所述课题,本发明提出了以下的技术方案。
25.(1)本发明的第一方案是一种连续梁的评价方法,对如下的连续梁进行评价,该连续梁具备在长度方向上排列配置并且在所述长度方向上相邻的端部彼此互相半刚性接合而成为中间支点的n根梁,n为2以上的自然数,所述连续梁整体的两端成为一对端支点,其中,该评价方法具有基于给定条件求出所述中间支点及所述一对端支点处的多个弯矩、及所述一对端支点处的多个转动角的解决定工序,所述给定条件包括:所述n根梁各自的长度及弯曲刚度;所述中间支点及所述一对端支点处的多个转动刚度;作用于所述n根梁的铅垂荷载;以及所述中间支点及所述一对端支点处的多个铅垂位移,在所述解决定工序中,在将所述多个弯矩及所述多个转动角规定为多个未知数,将所述多个转动刚度、所述多个弯矩及所述多个转动角的关系式和所述多个铅垂位移的关系式规定为数量与所述多个未知数的数量相同的多个第1边界条件时,以使得所述多个未知数满足所述多个第1边界条件的方式求解所述多个未知数,评价所述连续梁的弯矩及挠度分布。
26.根据该方案,多个未知数的数量与多个第1边界条件的数量相同。因而,基于作为给定条件而赋予的梁的长度及弯曲刚度、多个转动刚度、铅垂荷载、以及中间支点及一对端支点处的多个铅垂位移,以满足多个第1边界条件的方式求解多个未知数。根据该方法,能够求出多个未知数所包括的多个弯矩及多个转动角。
27.然后,根据求出的多个弯矩及多个转动角,基于多个铅垂位移的关系式算出多个铅垂位移。根据该方法,例如能够根据一对端支点处的接合状态更加合适地评价连续梁的弯矩、挠度分布。因此,能够合适地评价挠度。
28.(2)在所述(1)记载的连续梁的评价方法中,可以是,所述解决定工序具有:第1设计工序,赋予包括所述多个铅垂位移的设计值;第2设计工序,根据所述一对端支点处的接
合状态,对所述一对端支点赋予第2边界条件;临时设计工序,根据所述一对端支点处的接合状态,赋予包括作用于所述一对端支点及所述中间支点的所述弯矩的临时设计值;解算出工序,基于所述临时设计值,以满足所述多个第1边界条件及所述第2边界条件的方式,算出包括所述中间支点处的铅垂位移的计算结果的计算值;残差算出工序,求出所述设计值与所述计算值的残差即位移残差;以及判定工序,判定所述位移残差是否小于预先设定的阈值。
29.根据该方案,通过在判定工序中判定位移残差是否小于阈值,能够基于设计值及位移残差来评价基于临时设计值算出的计算值。
30.(3)在所述(2)记载的连续梁的评价方法中,可以是,所述解决定工序还具有在所述临时设计工序之后存储所述临时设计值的存储工序,在所述判定工序中所述位移残差为所述阈值以上时,将“代替在所述存储工序中存储了的所述临时设计值而在所述临时设计工序中赋予另外的新的临时设计值”和“基于该新的临时设计值进行所述解算出工序、所述残差算出工序、所述判定工序”设为一组处理而反复进行,直到在所述判定工序中判定为所述位移残差小于所述阈值,将在所述判定工序中判定为所述位移残差小于所述阈值时的所述临时设计值的所述弯矩规定为作用于所述中间支点的所述弯矩,基于该弯矩求出所述多个转动角。
31.根据该方案,将“赋予新的临时设计值”和“基于该新的临时设计值进行解算出工序、残差算出工序、判定工序”作为一组处理而反复进行,直到在判定工序中判定为位移残差小于阈值为止。根据该方法,能够以任意的精度算出弯矩。并且,能够基于该弯矩求出多个转动角。
32.(4)在所述(2)或(3)记载的连续梁的评价方法中,可以是,在所述解算出工序中,对于1以上且n以下的自然数i,将所述n根梁中的、从作为所述连续梁的一方的所述端支点的第1端支点朝向作为所述连续梁的另一方的所述端支点的第2端支点第i根的所述梁中的所述第1端支点侧的所述中间支点或所述端支点处的所述铅垂位移δ
0i
(m)规定为所述给定条件;关于第i根所述梁中的所述第2端支点侧的所述中间支点或所述端支点处的所述铅垂位移的计算结果δ
i,calc
(m),利用基于式(1)~式(8)得到的式(9),设为包含于所述计算值而算出;在将对于1以上且(n-1)以下的i的、第(i 1)根所述梁中的所述第1端支点侧的所述中间支点处的所述铅垂位移δ
0(i 1)
与第i根所述梁中的所述第2端支点侧的所述中间支点处的所述铅垂位移的计算结果δ
i,calc
的残差规定为第i残差时,在所述残差算出工序中,算出作为从所述第1残差到所述第(n-1)残差之和的中间残差;算出第2端支点残差,所述第2端支点残差是作为所述给定条件的所述第2端支点处的所述铅垂位移δn与第n根所述梁中的所述第2端支点处的所述铅垂位移的计算结果δ
n,calc
的残差;算出作为所述中间残差与所述第2端支点残差之和的所述位移残差。
33.[数学式1]
[0034][0035]
[0036][0037][0038][0039][0040][0041][0042][0043]
其中,对于1以上且n以下的自然数i,将第i根所述梁的长度规定为li(m),将在第i根所述梁中以所述第1端支点侧的端为原点并将从所述第1端支点朝向所述第2端支点的方向设为正的情况下规定的坐标规定为xi(m),将作用于第i根所述梁的铅垂荷载规定为wi(n/m),将第i根所述梁中的所述第1端支点侧的端处的转动刚度规定为s
jl,i
(nm/rad),将第i根所述梁中的所述第2端支点侧的端处的转动刚度规定为s
jr,i
(nm/rad),将第i根所述梁中的正弯的弯曲刚度规定为ei
s,i
(nm2),将第i根所述梁中的负弯的弯曲刚度规定为ei
h,i
(nm2),将第i根所述梁中的所述第2端支点侧的所述中间支点或所述端支点处的弯矩规定为m
j,i
(nm)。所述第2边界条件所包括的第1根所述梁中的所述第1端支点处的弯矩m
j,0
(nm),在所述第1端支点为铰性接合的情况下为0,在刚性接合或半刚性接合的情况下为未知数,第1根所述梁中的所述第1端支点处的转动角在所述第1端支点为刚性接合的情况下为0,在铰性接合或半刚性接合的情况下为未知数。
[0044]
根据该方案,能够使用数学式高精度地评价中间支点及一对端支点处的多个铅垂位移。
[0045]
(5)本发明的第二方案是一种连续梁的评价程序,用于对如下的连续梁进行评价的评价装置,该连续梁具备在长度方向上排列配置并且在所述长度方向上相邻的端部彼此互相半刚性接合而成为中间支点的n根梁,n为2以上的自然数,所述连续梁整体的两端成为一对端支点,其中,使所述评价装置作为基于给定条件求出所述中间支点及所述一对端支点处的多个弯矩、及所述一对端支点处的多个转动角的解决定部发挥功能,所述给定条件包括:所述n根梁各自的长度及弯曲刚度;所述中间支点及所述一对端支点处的多个转动刚度;作用于所述n根梁的铅垂荷载;以及所述中间支点及所述一对端支点处的多个铅垂位移,所述解决定部,在将所述多个弯矩及所述多个转动角规定为多个未知数,将所述多个转动刚度、所述多个弯矩及所述多个转动角的关系式和所述多个铅垂位移的关系式规定为数
量与所述多个未知数的数量相同的多个第1边界条件时,以使得所述多个未知数满足所述多个第1边界条件的方式求解所述多个未知数,评价所述连续梁的弯矩及挠度分布。
[0046]
根据该方案,多个未知数的数量与多个第1边界条件的数量相同。因而,基于作为给定条件而赋予的梁的长度及弯曲刚度、多个转动刚度、铅垂荷载、以及中间支点及一对端支点处的多个铅垂位移,以满足多个第1边界条件的方式求解多个未知数。根据该方法,能够求出多个未知数所包括的多个弯矩及多个转动角。
[0047]
然后,根据求出的多个弯矩及多个转动角,基于多个铅垂位移的关系式算出多个铅垂位移。根据该方法,例如能够根据一对端支点处的接合状态更加合适地评价连续梁的弯矩、挠度分布。因此,能够合适地评价挠度。
[0048]
(6)本发明的第三方案是一种组合梁的评价方法,算出正弯的弯曲刚度与负弯的弯曲刚度彼此不同且两端分别半刚性接合并在全长作用有等分布荷载的组合梁的作用于所述端的弯矩即端部弯矩、及在所述组合梁产生的挠度的最大值,其中,在将所述组合梁的所述端处的转动刚度除以所述组合梁的每单位长度的弯曲刚度而得到的值规定为无量纲化转动刚度,将所述组合梁的正弯的弯曲刚度及所述组合梁的负弯的弯曲刚度之比规定为无量纲化弯曲刚度时,
[0049]
基于所述无量纲化转动刚度及所述无量纲化弯曲刚度,利用显函数算出所述端部弯矩及所述挠度的最大值。
[0050]
根据该方案,发明人基于作为无量纲化后的值的无量纲化转动刚度及无量纲化弯曲刚度评价端部弯矩及挠度的最大值。发现了,根据该方法,能够与组合梁的规格无关地,利用显函数而通用性高且精度良好地算出端部弯矩及挠度的最大值。
[0051]
基于无量纲化转动刚度及无量纲化弯曲刚度,利用显函数算出组合梁的端部弯矩及挠度的最大值。根据该方法,不进行收敛计算就能够算出组合梁的端部弯矩及挠度的最大值。因此,能够合适地评价挠度。
[0052]
(7)在所述(6)记载的组合梁的评价方法中,可以是,在将假定为所述两端分别刚性接合并在全长作用有等分布荷载时的作用于所述组合梁的所述端的弯矩规定为刚接力矩,将假定为所述两端分别铰性接合并在全长作用有等分布荷载时的作用于所述组合梁的弯矩的最大值规定为铰接(pin joint)力矩,将所述两端分别半刚性接合并在全长作用有等分布荷载的作用于所述组合梁的所述端的弯矩规定为半刚接力矩,将所述半刚接力矩除以所述铰接力矩而得到的值规定为无量纲化接合部力矩,将所述刚接力矩除以所述铰接力矩而得到的值规定为无量纲化刚接力矩的情况下,基于所述无量纲化弯曲刚度,利用显函数算出所述无量纲化刚接力矩;基于算出的所述无量纲化刚接力矩、所述无量纲化转动刚度、及所述无量纲化弯曲刚度,利用显函数算出所述无量纲化接合部力矩;基于算出的所述无量纲化接合部力矩,利用显函数算出所述端部弯矩及所述挠度的最大值。
[0053]
根据该方案,基于无量纲化弯曲刚度,利用显函数算出无量纲化刚接力矩。进而,基于算出的无量纲化刚接力矩、无量纲化转动刚度及无量纲化弯曲刚度算出无量纲化接合部力矩,基于算出的无量纲化接合部力矩,分别利用显函数算出端部弯矩及挠度的最大值。
[0054]
这样一来,不进行收敛计算就能够算出组合梁的端部弯矩及挠度的最大值。
[0055]
(8)在所述(7)记载的组合梁的评价方法中,可以是,在将所述无量纲化刚接力矩规定为β
mj,rigid
,将所述无量纲化转动刚度规定为αj,将所述无量纲化弯曲刚度规定为αs时,
使用式(10)~式(12),通过式(13)算出所述无量纲化接合部力矩β
mj
。
[0056]
[数学式2]
[0057][0058][0059][0060][0061]
根据该方案,通过使用了式(10)~式(12)的式(13),不进行收敛计算就能够精度良好地算出无量纲化接合部力矩β
mj
。
[0062]
(9)在所述(8)记载的组合梁的评价方法中,可以是,在所述无量纲化刚接力矩β
mj,rigid
为0.4以下时,在式(13)中,代替所述无量纲化刚接力矩β
mj,rigid
,使用基于所述无量纲化刚接力矩β
mj,rigid
通过式(14)算出的无量纲化刚接力矩β
mj,rigid,theo
。
[0063]
[数学式3]
[0064][0065]
根据该方案,在无量纲化刚接力矩β
mj,rigid
为0.4以下的情况下,无量纲化刚接力矩β
mj,rigid
相对于精确解误差变大。即便是该情况下,通过代替无量纲化刚接力矩β
mj,rigid
而使用无量纲化刚接力矩β
mj,rigid,theo
,能够更加精度良好地算出无量纲化刚接力矩。
[0066]
发明效果
[0067]
根据本发明的所述各方案的连续梁的评价方法、连续梁的评价程序及组合梁的评价方法,能够合适地评价挠度。
附图说明
[0068]
图1是使用适用本发明的第1实施方式的连续梁的评价方法的连续梁的建筑物的俯视图。
[0069]
图2是图1中的剖切线a1-a1的剖视图。
[0070]
图3是说明梁的参数及作用于梁的弯矩的示意图。
[0071]
图4是说明作用于梁的外力及荷载的示意图。
[0072]
图5是说明作用于梁的剪力的示意图。
[0073]
图6是说明该连续梁及作用的外力的示意图。
[0074]
图7是说明在长度方向上相邻的一对梁中考虑了产生转动刚度的位置间的距离的情况下的梁的端处的转动刚度及转动角的关系的图。
[0075]
图8是说明在长度方向上相邻的一对梁中忽略了产生转动刚度的位置间的距离的情况下的梁的端处的转动刚度及转动角的关系的图。
[0076]
图9是实施该连续梁的评价方法所使用的连续梁的评价装置的框图。
[0077]
图10是示出该连续梁的评价方法的流程图。
[0078]
图11是示出本发明的第1实施方式的连续梁的评价程序的输入表的一例的图。
[0079]
图12是示出使用本发明的第1实施方式的连续梁的评价程序进行了评价的、作用于连续梁的弯矩分布相对于自第1端支点的距离的关系的图。
[0080]
图13是示出使用本发明的第1实施方式的连续梁的评价程序进行了评价的、转动角分布相对于自第1端支点的距离的关系的图。
[0081]
图14是示出使用本发明的第1实施方式的连续梁的评价程序进行了评价的、挠度分布相对于自第1端支点的距离的关系的图。
[0082]
图15是使用适用本发明的第2实施方式的组合梁的评价方法的组合梁的建筑物的纵剖图。
[0083]
图16是将该组合梁与边界条件一同示出的示意化了的主视图。
[0084]
图17是将该组合梁中的正弯的区域及负弯的区域示意化地示出的主视图。
[0085]
图18是示出情形1~情形5中的无量纲化转动刚度与无量纲化接合部力矩的关系的图。
[0086]
图19是示出组合梁中的无量纲化弯曲刚度与无量纲化刚接力矩的试算结果的关系的图。
[0087]
图20是示出无量纲化刚接力矩的近似解与精确解的关系的图。
[0088]
图21是示出无量纲化弯曲刚度与系数k的关系的图。
[0089]
图22是示出无量纲化弯曲刚度与变量α
j,t
的关系的图。
[0090]
图23是示出无量纲化接合部力矩的近似解与精确解的关系的图。
[0091]
图24是示出挠度的最大值的近似解与精确解的关系的图。
具体实施方式
[0092]
(第1实施方式)
[0093]
以下,一边参照图1~图14,一边说明本发明的连续梁的评价方法及连续梁的评价程序的第1实施方式。
[0094]
〔1.连续梁〕
[0095]
本实施方式的连续梁的评价方法(以下,也简称作评价方法)例如适宜用于对构成图1及图2所示的建筑物1的连续梁11进行评价。此外,在图1中透过后述的地板17而示出,在图2中未示出后述的柱33。在此所说的对连续梁11进行评价,意味着“求出连续梁11的弯矩、转动角及挠度分布等,例如对连续梁11的弯曲强度相对于连续梁11的弯矩存在何种程度的余裕进行评价”。
[0096]
在本例中,连续梁11具备在长度方向上相邻的端部彼此互相半刚性接合而成为中间支点12a的n根(在该例中为2根)梁(小梁)13。此外,n为2以上的自然数。
[0097]
在本例中,梁13具备地板17和梁主体18。此外,梁13的构成不限定于本例。
[0098]
地板17是所谓的合成板构件(slab),由梁主体18从下方支承。地板17具备承板(deck plate)20和配置于承板20上的rc(reinforced concrete)板构件21。
[0099]
承板20的凹凸形状在沿着水平面的、与梁主体18延伸的方向正交的方向上延伸。
[0100]
rc板构件21具备混凝土22和钢筋23。混凝土22形成为上下方向成为厚度方向的板状。混凝土22由承板20从下方支承。
[0101]
钢筋23沿着水平面延伸,埋设于混凝土22内。例如,钢筋23配置成在俯视下为格子状。
[0102]
n根梁13在梁13的长度方向上排列配置。
[0103]
梁主体18由钢骨的h型钢形成,沿着水平面延伸。在梁主体18的上翼缘,固定有螺柱26的下端部。螺柱26贯通承板20。螺柱26的上端部埋设于混凝土22内。
[0104]
梁主体18的端在中间支点12a处,分别半刚性接合于沿着水平面延伸的第1大梁(中间支承部)27。中间支点12a由第1大梁27在上下方向上支承。第1大梁27在与梁主体18正交的方向上延伸。梁主体18与第1大梁27的半刚性接合例如通过剪力板28及螺栓29等进行。
[0105]
作为连续梁11整体的两端的一对端支点12b由一对第2大梁(端支承部)31在上下方向上支承。第1大梁27及第2大梁31沿着第1方向延伸,该第1方向沿着水平面。端支点12b处的梁主体18的端与第2大梁31的接合的状态不特别限定,可以是铰性接合、半刚性接合及刚性接合中的任一个。
[0106]
建筑物1具备沿着第2方向延伸的第3大梁32,该第2方向沿着水平面并且与第1方向正交。第1大梁27及第2大梁31与第3大梁32的连接部分由柱33在上下方向上支承。
[0107]
以下,对这样构成的连续梁11的评价方法进行说明。
[0108]
〔2.连续梁的剪力分布及力矩分布的导出〕
[0109]
〔2.1.基本式〕
[0110]
在具备n个(跨度(span))梁13的连续梁11中,将从连续梁11的一方的端支点12b数起任意第i根(i为自然数,1≤i≤n)的梁13的参数及作用于梁13的弯矩、外力、剪力等如图3~图5所示那样假定。
[0111]
即,如图3所示,设为第i根梁13i沿着水平面延伸,设为梁13i的长度为li(m)。此外,在不将各梁13i区分说明时,也称作梁13。
[0112]
在梁13i中,设为正弯(向下凸)的弯曲刚度与负弯(向上凸)的弯曲刚度彼此不同。将梁13i的正弯的弯曲刚度设为ei
s,i
(nm2),将梁13i的负弯的弯曲刚度设为ei
h,i
(nm2)。
[0113]
如图4所示,规定将沿着梁13i向右设为正的情况下的坐标xi(m)。将梁13i的左端的位置设为坐标xi的原点(xi=0的位置)。假定在梁13i在全长作用有向下的等分布荷载(铅垂荷载)wi(n/m)。将梁13i的左端的转动刚度规定为s
jl,i
(nm/rad),将梁13i的右端的转动刚度规定为s
jr,i
(nm/rad)。
[0114]
如图3所示,将作用于梁13i的左端的弯矩(负弯矩)的绝对值规定为m
jl,i
(nm),将作用于梁13i的右端的弯矩(负弯矩)的绝对值规定为m
jr,i
(nm)。在梁13i,作用有由曲线l1示出的弯矩。此外,关于弯矩,将产生向下凸的弯曲的方向设为正。在梁13i中,将弯矩成为0的坐标xi规定为x
h,i
(m),x
s,i
(m)(0≤x
h,i
《x
s,i
≤li)。
[0115]
如图5所示,将梁13i的左端由大梁27、31等从下方支承的剪力(外力)设为v
jl,i
(n),
将梁13i的右端由大梁27、31等从下方支承的剪力设为v
jr,i
(n)。在梁13i作用有由曲线l2示出的剪力。
[0116]
此时,作用于梁13i的剪力分布v(xi)(n)和弯矩分布m(xi)(nm)可由式(21)及式(22)表示。此外,关于剪力v
jl,i
、v
jr,i
及剪力分布v(xi),将产生顺时针的转动的方向设为正( )。
[0117]
[数学式4]
[0118][0119][0120]
若对式(22)使用xi=li处的弯矩的边界条件,则得到式(23)及式(24)。
[0121]
[数学式5]
[0122][0123][0124]
在此,式(22)~式(24)中的弯矩的绝对值m
jl,i
、m
jr,i
表示负弯矩的大小,由(24-1)及(24-2)定义。
[0125]
[数学式6]
[0126][0127][0128]
若将式(24)代入到式(21),使用xi=li处的力的平衡条件,则得到式(25)及式(26)。
[0129]
[数学式7]
[0130]vjl,i-v
jr,i
=wi·
li··
(25)
[0131][0132]
若将式(26)代入到式(21),则得到关于剪力分布v(xi)的式(27)。
[0133]
[数学式8]
[0134][0135]
若将式(24)代入到式(22),则得到式(28)。
[0136]
[数学式9]
[0137][0138]
使用式(22),求出弯矩分布m(xi)=0时的坐标xi(x
h,i
,x
s,i
)。关于xi求解式(29)。考虑到是(x
h,i
《x
s,i
),则得到式(30)及式(31)。
[0139]
[数学式10]
[0140][0141][0142][0143]
〔2.2.转动角分布〕
[0144]
关于梁13i的曲率分布,将向下凸的情况设为正( )而规定为ρ(xi)(1/m)。关于梁13i的上下方向的挠度(位移)分布,将铅垂向下设为正( )而规定为δ(xi)(m)。此时,曲率分布ρ(xi)可由式(34)表示。
[0145]
[数学式11]
[0146][0147]
〔2.2.1.区间[a]=[0,x
h,i
]的转动角分布〕
[0148]
在坐标xi为0以上且x
h,i
以下时,将梁13i的转动角分布规定为(rad:弧度)。关于转动角分布将自水平线的转动方向为顺时针的情况规定为正( )。关于转动角分布通过将曲率分布ρ(xi)由式(28)及式(34)表示,进而将曲率分布ρ(xi)在区间[0,xi]积分,使用式(35),如式(36)那样求出。在求出转动角分布时,考虑作为xi=0处的边界条件的、转动角分布即,梁13i中的左侧(后述的第1端支点12b1侧)的转动角为
[0149]
此外,将区间[a]中的转动角分布也称作转动角分布
[0150]
[数学式12]
[0151][0152][0153]
〔2.2.2.区间[b]=[x
h,i
,x
s,i
]的转动角分布〕
[0154]
在坐标xi为x
h,i
以上且x
s,i
以下时,关于梁13i的转动角分布通过将曲率分布ρ(xi)由式(28)及式(34)表示,在区间[x
h,i
,xi]积分,如式(37)那样求出。在求出转动角分布时,考虑xi=x
h,i
处的边界条件。
[0155]
此外,将区间[b]中的转动角分布也称作转动角分布
[0156]
[数学式13]
[0157][0158]
〔2.2.3.区间[c]=[x
s,i
,li]的转动角分布〕
[0159]
在坐标xi为x
s,i
以上且li以下时,关于梁13i的转动角分布通过将曲率分布ρ(xi)由式(28)及式(34)表示,在区间[x
s,i
,xi]积分,如式(38)那样求出。在求出转动角分布时,考虑xi=x
s,i
处的边界条件。
[0160]
此外,将区间[c]中的转动角分布也称作转动角分布
[0161]
[数学式14]
[0162][0163]
〔2.3.挠度分布〕
[0164]
〔2.3.1.区间[a]=[0,x
h,i
]的挠度分布〕
[0165]
在坐标xi为0以上且x
h,i
以下时,关于梁13i的挠度分布δ(xi),通过将转动角分布在区间[0,xi]积分,使用式(41),如式(42)那样求出。在求出挠度分布δ(xi)时,考虑作为xi=0处的边界条件的、铅垂位移δ(xi=0)=δ
0i
。
[0166]
此外,将区间[a]中的挠度分布δ(xi)也称作挠度分布δa(xi)。
[0167]
[数学式15]
[0168][0169][0170]
〔2.3.2.区间[b]=[x
h,i
,x
s,i
]的挠度分布〕
[0171]
在坐标xi为x
h,i
以上且x
s,i
以下时,关于挠度分布δ(xi),通过将转动角分布在区间[x
h,i
,xi]积分,如式(43)那样求出。在求出挠度分布δ(xi)时,考虑xi=x
h,i
处的边界条件。
[0172]
此外,将区间[b]中的挠度分布δ(xi)也称作挠度分布δb(xi)。
[0173]
[数学式16]
[0174][0175]
〔2.3.3.区间[c]=[x
s,i
,li]的挠度分布〕
[0176]
在坐标xi为x
s,i
以上且li以下时,关于挠度分布δ(xi),通过将转动角分布在区间[x
s,i
,xi]积分,如式(44)那样求出。在求出挠度分布δ(xi)时,考虑xi=x
s,i
处的边界条件。
[0177]
此外,将区间[c]中的挠度分布δ(xi)也称作挠度分布δc(xi)。
[0178]
[数学式17]
[0179][0180]
〔3.连续梁的评价方法中的计算步骤〕
[0181]
在评价方法中,基于给定条件求出中间支点12a及一对端支点12b处的多个弯矩m
j,i
及一对端支点12b处的多个转动角
[0182]
在对在此所说的给定条件进行说明之前,对多个铅垂位移、多个转动刚度进行说明。
[0183]
首先,如图6所示,将一对端支点12b中的左侧的端支点12b(一方的端支点)也称作第1端支点12b1。将一对端支点12b中的右侧的端支点12b(另一方的端支点)也称作第2端支点12b2。此外,在图6中,作为坐标的一例,示出第i梁13i的坐标xi。
[0184]
关于所述坐标xi,将梁13i的第1端支点12b1侧的端设为原点,将从第1端支点12b1朝向第2端支点12b2的方向设为正。以下,将n根梁13i中的从第1端支点12b1朝向第2端支点12b2第i根的梁13i也称作第i梁13i。例如,n根梁13中最靠第1端支点12b1侧的梁13是第1梁131。
[0185]
所述转动刚度s
jl,i
是第i梁13i中的第1端支点12b1侧的端(中间支点12a)处的转动刚度。所述转动刚度s
jr,i
是第i梁13i中的第2端支点12b2侧的端(中间支点12a)处的转动刚度。
[0186]
关于第1梁131中的第1端支点12b1处的上下方向的挠度,将铅垂下方设为正( )而设为δ0(m)。对于1以上且(n-1)以下的i,将第i梁13i中的第2端支点12b2侧的中间支点12a处的铅垂位移设为δi(m)。将第n梁13n中的第2端支点12b2处的铅垂位移设为δn(m)。给定条件中的多个铅垂位移是对于0以上且n以下的自然数i的铅垂位移δi。
[0187]
例如,关于图1所示的连续梁11的中间支点12a处的铅垂位移δi,也可以利用公知的方法,根据规定为作用于第1大梁27的分布荷载的范围r求出。并且,根据作用于该范围r内的分布荷载及第1大梁27的弯曲刚度等,求出中间支点12a处的铅垂位移δi。
[0188]
例如,基于大梁的转动阻力等的弯矩不作用于各支点12a、12b,作用于在长度方向上相邻的梁13的端的弯矩设为相同的值。即,例如,作用于第i梁13i的右端的弯矩的绝对值m
jr,i
与作用于第(i 1)梁13
i 1
的左端的弯矩的绝对值m
jl,i 1
相等。将该相等的值设为m
j,i
(nm)。弯矩m
j,i
是对于1以上且(n-1)以下的i,第i梁13i中的第2端支点12b2侧的中间支点12a
处的弯矩。
[0189]
此外,弯矩m
j,0
与作用于第1梁131的左端的弯矩的绝对值m
jl,1
(第1梁131中的第1端支点12b1处的弯矩)相等。弯矩m
j,n
与作用于第n梁13n的右端的弯矩的绝对值m
jr,n
(第n梁13n中的第2端支点12b2处的弯矩)相等。
[0190]
这样,规定了连续梁11中的中间支点12a及一对端支点12b处的多个(n 1)弯矩m
j,0
,
‥
,m
j,n
。
[0191]
所述给定条件包括所述多个铅垂位移、多个转动刚度s
j,i
、n根梁13i各自的长度li、n根梁13i各自的弯曲刚度(正弯的弯曲刚度ei
s,i
及负弯的弯曲刚度ei
h,i
)、作用于n根梁13i中的各梁的等分布荷载wi。
[0192]
此时,各支点12a、12b处的梁13i的转动角可使用各支点12a、12b处的梁13i的转动刚度和弯矩的绝对值m
jl,i
、m
jr,i
表示。
[0193]
在此,将第1梁131的左端的转动刚度s
jl,1
设为s
j,0
,将中间支点12a的代表点处的转动刚度设为s
j,i
。
[0194]
如图6所示,连续梁11具备n根梁13i。连续梁11的中间支点12a分别半刚性接合于第1大梁27,连续梁11的端支点12b由第2大梁31支承。
[0195]
如图7所示,考虑第(i-1)根的第(i-1)梁13
i-1
与第i根的第i梁13i的接合部。
[0196]
将第i梁13i的左端处的转动角规定为将第i梁13i的右端处的转动角规定为在该情况下,第(i-1)根的第(i-1)梁13
i-1
的右端处的转动角成为将相对于水平面的第i梁13i的左端处的转动角规定为将相对于水平面的第i梁13i的右端处的转动角规定为在该情况下,相对于水平面的第(i-1)梁13
i-1
的右端处的转动角成为
[0197]
将在第(i-1)梁13
i-1
的右端产生转动刚度s
jr,i-1
的位置与在第i梁13i的左端产生转动刚度s
jl,i
的位置的距离设为极小长度。
[0198]
考虑转动角分布的正负,根据各变量的定义得到式(47)及式(48)。
[0199]
[数学式18]
[0200][0201][0202]
根据图7的变形状态的几何学的关系,得到式(49)。
[0203]
[数学式19]
[0204][0205]
在该情况下,假定为可忽略极小长度。此时,如图8所示,第(i-1)梁13
i-1
的转动刚度s
jr,i-1
及第i梁13i的转动刚度s
jl,i
由转动刚度s
j,i-1
代表。转动刚度s
j,i-1
从将式(47)及式(48)代入到式(49)而得到的、式(50)及式(51)得到。
[0206]
[数学式20]
[0207][0208][0209]
因此,转动刚度s
j,i-1
可由夹着各中间支点12a的左右的接合部的扭转弹簧的串联结合表示。
[0210]
在此,对于i=2~(n-1),式(38)中的如以下那样求出。根据图8,第i梁13i的左端的中间支点12a处的转动角使用式(49)而与右端的中间支点12a处的转动角建立关系。在式(49)中,使用该中间支点12a处的力矩的绝对值m
j,i-1
和转动刚度s
j,i-1
。
[0211]
而且,是第(i-1)梁13
i-1
的右端处的转动角,因此,等于第(i-1)梁13
i-1
的将x
i-1
=l
i-1
代入到式(38)而得到的值。
[0212]
因此,将式(38)代入到式(49),导出式(8)。当赋予第1端支点12b1的转动角初始值及各中间支点12a和两端支点12b的力矩时,对于i=2~(n-1)的利用式(8)依次求出。
[0213]
在对连续梁11进行评价时,关于弯矩,规定了作为对于0以上且n以下的自然数i的、弯矩m
j,i
(多个弯矩)的(n 1)个未知数。
[0214]
虽然也取决于连续梁11的两端支点12b处的接合状态,但一般可以说是以下这样。
[0215]
对第1梁131的两端处的弯矩m
j,0
、m
j,1
及作为未知数的第1端支点12b1处的第1梁131的转动角分别赋予初始值。于是,根据x1=l1的式(38)的转动角分布确定第1梁131的转动角根据式(49),确定与第1梁131相邻的第2根的第2梁132的转动角
[0216]
转动角相当于对第2梁132适用式(38)时的转动角分布的x2=0的值即
[0217]
同样,对于3以上且n以下的i,当赋予第(i-1)梁13
i-1
的两端接合部的弯矩m
j,i-2
、m
j,i-1
时,根据x
i-1
=l
i-1
的式(38)的转动角分布确定第(i-1)梁13
i-1
的右端处的转动角根据式(49),确定与第(i-1)梁13
i-1
相邻的第i梁13i的左端处的转动角此外,第i梁13i的左端处的转动角相当于对第i梁13i适用式(38)时的转动角分布(xi)的xi=0的值即
[0218]
这样一来,到i=1~n为止,假定弯矩m
j,i-1
、m
j,i
,依次求出对应的转动角及转动角于是,根据xi=li的式(44)的挠度分布δc(xi),得到各支点12a、12b处的铅垂位移δ
0i
。
[0219]
此外,第2端支点12b2处的第n梁13n的转动角也规定为未知数。即,关于转动角,转动角及转动角这2个为未知数。
[0220]
这样一来,未知数的数量例如是各支点12a、12b处的弯矩m
j,i
及两端支点12b处的转动角的(n 3)。
[0221]
与此相对,用于求解多个未知数的多个第1边界条件,如以下这样规定。
[0222]
根据作为给定条件的第1端支点12b1处的铅垂位移δ
01
及对于1以上且n以下的i的xi=li的式(44),对于0以上且n以下的i,得到作为多个第1边界条件的式(54-1)~式(54-(n 1))这(n 1)个关系式。这些(n 1)个关系式是多个铅垂位移δi的关系式。
[0223]
[数学式21]
[0224]
δ0=δ
01
··
(54-1)
[0225][0226][0227][0228][0229]
例如,式(54-2)是关于弯矩m
j,0
、m
j,1
的方程式。式(54-3)是关于弯矩m
j,0
、m
j,1
、m
j,2
的方程式。式(54-(n 1))是关于弯矩m
j,0
、m
j,1
、m
j,2
、
‥
、m
j,n
的方程式。
[0230]
根据连续梁11的两端支点12b处的转动刚度、弯矩及转动角的关系式,得到式(55-1)及式(55-2)这2个关系式。
[0231]
[数学式22]
[0232][0233][0234]
式(55-1)及式(55-2)根据连续梁11的两端支点12b处的接合状态而得到。例如,若连续梁11的左侧的端支点12b(第1端支点12b1)为铰性接合,则弯矩m
j,0
为0。
[0235]
这样一来,第1边界条件的数量为(n 3)个关系式的(n 3)。即,多个第1边界条件的数量与多个未知数的数量相同。
[0236]
因此,若以使得多个未知数满足多个第1边界条件的方式求解多个未知数,则(n 1)个弯矩m
j,i
的组合唯一地确定。
[0237]
在此,假定所有支点12a、12b处的弯矩m
j,i
的值。将根据假定的弯矩m
j,i
得到的、与
各支点12a、12b处的铅垂位移δi对应的铅垂位移的计算结果设为δ
i,calc
(m)。假定所有支点12a、12b处的弯矩m
j,i
的值,将根据假定的弯矩m
j,i
得到的铅垂位移的计算结果δ
i,calc
与根据变形的符合条件确定的铅垂位移δi之差的平方的、在所有支点12a、12b处的和(基于式(57)的值、位移残差)规定为目的函数。于是,通过探寻目的函数成为最小的弯矩m
j,i
的组合的最优化计算,能够确定所有支点12a、12b处的弯矩m
j,i
。
[0238]
在最优化计算中,可使用公知的差分进化法(differential evolution method)等。
[0239]
此外,关于与连续梁11的两端支点12b处的接合状态相应的连续梁的评价方法中的计算步骤,在后面叙述。
[0240]
[数学式23]
[0241][0242]
〔4.连续梁的评价方法所使用的评价装置〕
[0243]
为了实施连续梁的评价方法而对连续梁11进行评价,例如使用图9所示的评价装置101。评价装置101是计算机,具备cpu(central processing unit)111、主存储装置125、辅助存储装置126、输入输出接口(io
·
i/f)131、记录
·
再现装置136。
[0244]
主存储装置125是成为cpu111的工作区域等的ram(randomaccess memory)等。
[0245]
输入输出接口131连接于键盘、鼠标等输入装置132及显示装置133。
[0246]
记录
·
再现装置136进行对cd、dvd等盘型等的记录介质137的数据的记录、再现。
[0247]
辅助存储装置126是存储各种数据、程序等的硬盘驱动装置等。在辅助存储装置126中,储存有用于使所述计算机作为评价装置101发挥功能的连续梁的评价程序(以下,简称作评价程序)127、os程序等各种程序、预先设定的阈值等。包括评价程序127的各种程序经由记录
·
再现装置136从记录介质137取入到辅助存储装置126。评价程序等储存于记录介质137。
[0248]
此外,这些程序也可以经由闪存等可移动的存储器、未图示的通信装置从外部装置取入到辅助存储装置126。
[0249]
在该辅助存储装置126,还在评价程序127的执行过程中,设置临时设定值文件128。在临时设定值文件128中储存后述的临时设计值。
[0250]
cpu111执行各种运算处理。
[0251]
cpu111功能上具备基于给定条件求出多个弯矩及多个转动角的解决定部112。而且,解决定部112功能上具备第1设计部113、第2设计部114、临时设计部115、存储部116、解算出部117、残差算出部118、判定部119、解设定部120。
[0252]
这些作为cpu111的功能构成要素的第1设计部113、第2设计部114、临时设计部115、存储部116、解算出部117、残差算出部118、判定部119及解设定部120均通过cpu111执行储存于辅助存储装置126的评价程序127等来发挥功能。评价程序127等是用于评价装置101的程序。评价程序127使评价装置101作为解决定部112发挥功能。
[0253]
〔5.连续梁的评价方法〕
[0254]
接着,对评价装置101的评价动作(评价方法)进行说明。此外,如表1所示,第1端支
点12b1的接合状态有铰性接合、半刚性接合及刚性接合这3种。第2端支点12b2的接合状态有铰性接合、半刚性接合及刚性接合这3种。因此,连续梁11的一对端支点12b处的接合状态全部有9种。
[0255]
表1
[0256][0257]
其中,例如,在第1端支点12b1为铰性接合且第2端支点12b2为半刚性接合的情况下、和第1端支点12b1为半刚性接合且第2端支点12b2为铰性接合的情况下,若使连续梁11的方向反过来则成为相同的构成。因而,将两端支点12b1、12b2为铰性接合的情况设为情形1来进行说明。将两端支点12b1、12b2为半刚性接合的情况设为情形2,将两端支点12b1、12b2为刚性接合的情况设为情形3来进行说明。将第1端支点12b1为铰性接合且第2端支点12b2为半刚性接合的情况设为情形4a,将第1端支点12b1为铰性接合且第2端支点12b2为刚性接合的情况设为情形5a来进行说明。将第1端支点12b1为刚性接合且第2端支点12b2为半刚性接合的情况设为情形6a来进行说明。
[0258]
并且,关于第1端支点12b1为半刚性接合且第2端支点12b2为铰性接合的情况下的情形4b,连续梁11是与情形4a同样的构成,所以省略说明。关于第1端支点12b1为刚性接合且第2端支点12b2为铰性接合的情况下的情形5b,也同样省略。第1端支点12b1为半刚性接合且第2端支点12b2为刚性接合的情况的情形6b,也同样省略。
[0259]
〔5.1.情形1(一对端支点为铰性接合)的情况下的连续梁的评价方法〕
[0260]
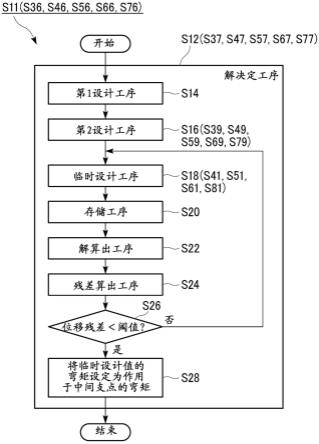
图10是示出连续梁11为情形1的情况下的本实施方式的评价方法s11的流程图。评价方法s11具有基于给定条件求出多个弯矩及多个转动角的解决定工序(图10所示的步骤s12)。
[0261]
在解决定工序s12中,首先,第1设计部113进行第1设计工序(步骤s14)(解决定工序s12具有第1设计工序s14)。在第1设计工序s14中,赋予包括连续梁11的一对端支点12b及中间支点12a处的多个铅垂位移δi的设计值。多个铅垂位移δi作为所述给定条件而赋予。在第1设计工序s14中,所述设计值中,包括所述多个转动刚度、n根梁13i各自的长度li、n根梁13i各自的弯曲刚度、分别作用于n根梁13i的等分布荷载wi。
[0262]
当第1设计工序s14结束后,向步骤s16转移。
[0263]
接着,在第2设计工序s16中,第2设计部114根据一对端支点12b处的接合状态对一对端支点12b赋予第2边界条件。在情形1的情况下,第2边界条件是,弯矩m
j,0
、m
j,n
分别为0nm。即,第2边界条件中包括转动角为未知数。
[0264]
当第2设计工序s16结束后,向步骤s18转移。
[0265]
接着,在临时设计工序s18中,临时设计部115根据一对端支点12b处的接合状态,赋予包括作用于一对端支点12b及中间支点12a的弯矩m
j,i
的临时设计值。在连续梁11为情形1的情况下,临时设计部115还作为临时设计值,赋予第1端支点12b1处的梁131的转动角
[0266]
当临时设计工序s18结束后,向步骤s20转移。
[0267]
接着,在存储工序s20中,存储部116在临时设计工序s18之后,在临时设定值文件128存储临时设计值。当存储工序s20结束后,向步骤s22转移。
[0268]
接着,在解算出工序s22中,解算出部117基于存储于临时设定值文件128的临时设计值,以满足多个第1边界条件及第2边界条件的方式,算出包括中间支点12a处的铅垂位移的计算结果δ
i,calc
的计算值。计算值包括第2端支点12b2处的铅垂位移的计算结果即铅垂位移的计算结果δ
n,calc
。铅垂位移的计算结果δ
i,calc
基于式(54-2)~式(54-(n 1))中的铅垂位移δ1~铅垂位移δn这n个值而得到。
[0269]
作为铅垂位移的计算结果δ
0,calc
的铅垂位移δ
01
(铅垂位移δ0),是作为给定条件赋予的多个铅垂位移的1个要素,所以,在解算出工序s22中不新算出其值。铅垂位移的计算结果δ
i,calc
按δ
1,calc
、δ
2,calc
、
‥
、δ
n,calc
的顺序算出。
[0270]
当解算出工序s22结束后,向步骤s24转移。
[0271]
接着,在残差算出工序s24中,残差算出部118求出设计值与计算值的残差即位移残差。位移残差使用在解算出工序s22中算出的多个铅垂位移的计算结果δ
i,calc
及在第1设计工序s14中作为所述给定条件赋予的多个铅垂位移δi,通过式(57)求出。
[0272]
对位移残差更详细地进行说明。在此,将对于1以上且(n-1)以下的i的、梁13
(i 1)
中的第1端支点12b1侧的中间支点12a处的铅垂位移δ
0(i 1)
与梁13i中的第2端支点12b2侧的中间支点12a处的铅垂位移的计算结果δ
i,calc
的残差,规定为第i残差。
[0273]
在残差算出工序s24中,算出作为第1残差~第(n-1)残差之和的中间残差。算出作为给定条件的第2端支点12b2处的铅垂位移δn与梁13n中的第2端支点12b2处的铅垂位移的计算结果δ
n,calc
的残差即第2端支点残差。此时,位移残差成为中间残差与第2端支点残差之和。此外,残差既可能为正的值也可能为负的值。为了将残差之和作为误差合适地累加,将各残差的绝对值之和、或各残差的平方之和,设为位移残差。
[0274]
此外,在残差算出工序s24中,判定作为与转动角分布弯矩分布m(xi)m
j,i
、弯曲刚度eii、弯矩m
j,i
、转动刚度s
j,i
、转动角i,相关的式(60)及式(61)的符合条件是否成立。弯矩分布m(xi)从式(22)求出。
[0275]
[数学式24]
[0276][0277][0278]
其中,弯曲刚度eii在正弯的情况下是正弯的弯曲刚度ei
s,i
,在负弯的情况下是负弯的弯曲刚度ei
h,i
。
[0279]
当残差算出工序s24结束后,向步骤s26转移。
[0280]
接着,在判定工序s26中,判定部119判定位移残差是否小于阈值。在判定工序s26中判定为位移残差小于阈值(是)时,向步骤s28转移。另一方面,在判定工序s26中判定为位移残差为阈值以上(否)时,向步骤s18转移。
[0281]
在解设定工序s28中,解设定部120将存储于临时设定值文件128的临时设计值的弯矩规定为作用于中间支点12a的弯矩。然后,基于该弯矩求出多个转动角和挠度分布。
[0282]
以上,结束评价方法s11中的全部工序。
[0283]
在临时设计工序s18中,代替在存储工序s20中存储于临时设定值文件128的临时设计值而赋予另外的新的临时设计值。在从临时设计工序s18转移来的存储工序s20中,将所述另外的新的临时设计值存储于临时设定值文件128。然后,基于所述另外的新的临时设计值,进行存储工序s20、解算出工序s22、残差算出工序s24及判定工序s26。
[0284]
这样,在判定工序s26中判定为位移残差为阈值以上(否)时,将在存储工序s20中赋予另外的新的临时设计值的处理、和基于该另外的新的临时设计值进行存储工序s20、解算出工序s22、残差算出工序s24及判定工序s26的处理设为一组处理。并且,反复进行该设为组的工序,直到在判定工序s26中判定为位移残差小于阈值为止。在第2次以后的临时设计工序s18中,例如按照差分进化法再次设定临时设计值,进行临时设计工序s18~判定工序s26的计算,由此,能够有效地进行位移残差的收敛计算。
[0285]
〔5.2.情形2(一对端支点为半刚性接合)的情况下的连续梁的评价方法〕
[0286]
在该情况下的评价方法s36中,进行基于给定条件求出多个弯矩及多个转动角的解决定工序s37。
[0287]
在解决定工序s37中,首先,进行所述第1设计工序s14。当第1设计工序s14结束后,向步骤s39转移。
[0288]
接着,在第2设计工序s39中,第2设计部114根据一对端支点12b处的接合状态赋予第2边界条件。在情形2的情况下,第2边界条件是连续梁11的端支点12b1、12b2处的式(64)及式(65)。即,弯矩m
j,0
、m
j,n
为未知数。第2边界条件中,包括转动角为未知数。
[0289]
[数学式25]
[0290][0291][0292]
转动刚度s
j,0
、s
j,i
分别为常数,所以,例如,在式(64)中,若求出弯矩m
j,0
及转动角的一方,则可根据式(64)求出弯矩m
j,0
及转动角的另一方。关于式(65),也与式(64)同样。当第2设计工序s39结束后,向步骤s41转移。
[0293]
接着,在临时设计工序s41中,临时设计部115根据一对端支点12b处的接合状态,赋予包括作用于中间支点12a的弯矩m
j,i
的临时设计值。在连续梁11为情形2的情况下,还赋予弯矩m
j,0
及转动角的一方作为临时设计值。
[0294]
当临时设计工序s41结束后,进行存储工序s20、解算出工序s22、残差算出工序s24、判定工序s26,基于判定工序s26中的判定向解设定工序s28或临时设计工序s41转移。
[0295]
在该情况下的解设定工序s28中,使用算出的转动角根据式(65)算出弯矩m
j,n
。
[0296]
〔5.3.情形3(一对端支点为刚性接合)的情况下的连续梁的评价方法〕
[0297]
在该情况下的评价方法s46中,进行基于给定条件求出多个弯矩及多个转动角的解决定工序s47。
[0298]
在解决定工序s47中,首先,进行所述第1设计工序s14。当第1设计工序s14结束后,向步骤s49转移。
[0299]
接着,在第2设计工序s49中,第2设计部114根据一对端支点12b处的接合状态赋予
第2边界条件。在情形3的情况下,第2边界条件是,转动角及转动角分别为0rad。即,弯矩m
j,0
、m
j,n
为未知数。
[0300]
当第2设计工序s49结束后,向步骤s51转移。
[0301]
接着,在临时设计工序s51中,临时设计部115根据一对端支点12b处的接合状态,赋予包括作用于中间支点12a的弯矩m
j,i
的临时设计值。在连续梁11为情形3的情况下,作为临时设计值,还赋予作用于一对端支点12b的弯矩m
j,0
、m
j,n
。
[0302]
当临时设计工序s51结束后,进行存储工序s20、解算出工序s22、残差算出工序s24、判定工序s26,基于判定工序s26中的判定向解设定工序s28或临时设计工序s51转移。
[0303]
其中,在残差算出工序s24中,铅垂位移的计算结果δ
0,calc
不新计算,作为铅垂位移的计算结果δ
0,calc
,设为通过给定条件赋予的铅垂位移δ0的值。转动角不新计算,设为0rad。
[0304]
在连续梁11为情形3的情况下,在残差算出工序s24中,考虑作为给定条件的根据在式(38)中设为xi=li而得到的式(68)算出转动角对转动角的平方乘以合适的权重系数(正的值),加到位移残差中。
[0305]
[数学式26]
[0306][0307]
〔5.4.情形4a(第1端支点为铰性接合且第2端支点为半刚性接合)的情况下的连续梁的评价方法〕
[0308]
在该情况下的评价方法s56中,进行基于给定条件求出多个弯矩及多个转动角的解决定工序s57。
[0309]
在解决定工序s57中,首先,进行所述第1设计工序s14。当第1设计工序s14结束后,向步骤s59转移。
[0310]
接着,在第2设计工序s59中,第2设计部114根据一对端支点12b处的接合状态赋予第2边界条件。在情形4a的情况下,第2边界条件是弯矩m
j,0
为0nm、和式(65)。即,第2边界条件中包括转动角为未知数。
[0311]
当第2设计工序s59结束后,向步骤s61转移。
[0312]
接着,在临时设计工序s61中,临时设计部115根据一对端支点12b处的接合状态,赋予包括作用于中间支点12a的弯矩m
j,i
的临时设计值。在连续梁11为情形4a的情况下,作为临时设计值,还赋予第1端支点12b1处的转动角作用于第2端支点12b2的弯矩m
j,n
。
[0313]
当临时设计工序s61结束后,进行存储工序s20、解算出工序s22、残差算出工序s24、判定工序s26,基于判定工序s26中的判定向解设定工序s28或临时设计工序s61转移。
[0314]
〔5.5.情形5a(第1端支点为铰性接合且第2端支点为刚性接合)的情况下的连续梁的评价方法〕
[0315]
在该情况下的评价方法s66中,进行基于给定条件求出多个弯矩及多个转动角的解决定工序s67。
[0316]
在解决定工序s67中,首先,进行所述第1设计工序s14。当第1设计工序s14结束后,向步骤s69转移。
[0317]
接着,在第2设计工序s69中,第2设计部114根据一对端支点12b处的接合状态赋予第2边界条件。在情形5a的情况下,第2边界条件是弯矩m
j,0
为0nm、和转动角为0rad。即,第2边界条件中包括转动角为未知数。当第2设计工序s69结束后,进行所述临时设计工序s61。
[0318]
此后,一对端支点12b处的接合状态与情形4a的情况相同,所以省略说明。其中,在连续梁11为情形5a的情况下,在残差算出工序s24中,在判定所述符合条件是否成立时,进行以下的工序。即,在残差算出工序s24中,考虑作为给定条件的根据在式(38)中设为xi=li而得到的式(68)算出转动角然后,对转动角的平方乘以合适的权重系数(正的值),加到位移残差中。
[0319]
〔5.6.情形6a(第1端支点为刚性接合且第2端支点为半刚性接合)的情况下的连续梁的评价方法〕
[0320]
在该情况下的评价方法s76中,进行基于给定条件求出多个弯矩及多个转动角的解决定工序s77。
[0321]
在解决定工序s77中,首先,进行所述第1设计工序s14。当第1设计工序s14结束后,向步骤s79转移。
[0322]
接着,在第2设计工序s79中,第2设计部114根据一对端支点12b处的接合状态赋予第2边界条件。在情形6a的情况下,第2边界条件是,转动角为0rad、和式(65)。即,弯矩m
j,0
为未知数。当第2设计工序s79结束后,向步骤s81转移。
[0323]
接着,在临时设计工序s81中,临时设计部115根据一对端支点12b处的接合状态,赋予包括作用于中间支点12a的弯矩m
j,i
的临时设计值。在连续梁11为情形6a的情况下,作为临时设计值,还分别赋予作用于一对端支点12b的弯矩m
j,0
、m
j,n
。
[0324]
当临时设计工序s81结束后,进行存储工序s20、解算出工序s22、残差算出工序s24、判定工序s26,基于判定工序s26中的判定向解设定工序s28或临时设计工序s81转移。其中,在连续梁11为情形6a的情况下,在残差算出工序s24中,在判定所述符合条件是否成立时,进行以下的工序。即,对在解算出工序s22中得到的转动角与根据所述第2边界条件所包括的式(65)和临时设计值的m
j,n
计算的转动角之差的平方乘以合适的权重系数(正的值),加到位移残差中。
[0325]
如以上说明的那样,在具备n根梁13的连续梁11中,连续梁11所具备的支点(中间支点12a及端支点12b)的数量为(n 1)。在各支点处,力矩及转动角未知,所以,根据(n 1)
×
2的式,存在2(n 1)的未知数。即,多个未知数的数量为2(n 1)。
[0326]
另一方面,作为多个转动刚度、多个弯矩及多个转动角的关系式,赋予(n 1)的条件式。
[0327]
在赋予第2边界条件的情况下,如以下这样。
[0328]
(1)连续梁11的端支点12b的至少一方为铰性接合的情况
[0329]
由于铰性接合的端支点12b处的弯矩为0,所以,未知数以铰性接合的端支点12b的数量(0以上且2以下)减少。由此,铰性接合中的转动角、弯矩、转动刚度的式也是,在
的式中,成为mj=sj=0。因而转动角成为不定(不确定),基于第1边界条件的条件式以铰性接合的端支点12b的数量减少。
[0330]
(2)连续梁11的端支点12b的至少一方为刚性接合的情况
[0331]
刚性接合的端支点12b处的转动角为0,所以,未知数以刚性接合的端支点12b的数量(0以上且2以下)减少。由此,刚性接合中的转动角、弯矩、转动刚度的式也是,在的式中成为sj=∞(无限大)。因而弯矩mj成为不定,基于第1边界条件的条件式以刚性接合的端支点12b的数量减少。
[0332]
另外,作为各支点的铅垂位移的给定条件,赋予(n 1)的条件式。
[0333]
通过赋予端支点12b为铰性接合或刚性接合这一第2边界条件,多个未知数以第2边界条件的数量减少。条件式成为不定,第1边界条件的数量减少。
[0334]
其结果,保持多个未知数的数量与多个第1条件式的数量和多个第2条件式的数量之和相同(一定)这一条件。
[0335]
通过实施以上说明的、连续梁11为情形1~情形6的情况下的评价方法,无论连续梁11的一对端支点12b处的接合状态如何,均能够基于给定条件求出多个弯矩及多个转动角。
[0336]
此外,连续梁11的弯矩在式(22)中,根据通过式(24)求出的剪力v
jl,i
、弯矩m
j,i
等,通过式(70)得到。
[0337]
[数学式27]
[0338][0339]
关于连续梁11的挠度分布,根据坐标xi的区间,通过式(42)~式(44)得到。
[0340]
另外,也可以使用本实施方式的评价方法,进行设计连续梁11的连续梁的设计方法。
[0341]
〔6.评价例1〕
[0342]
发明人使用所述差分进化法实施评价方法,制作了基于给定条件求出多个弯矩及多个转动角的评价程序。将评价程序的输入表c示于图11。对向输入表c输入的主要的连续梁11的参数等进行说明。
[0343]
在输入表c中,将连续梁11的梁13的根数(number of continuous beam span)n向单元格c1输入。在本例中,将n设为5。将收敛计算所使用的阈值(threshold for ending convergence)向单元格c2输入。在本例中,将阈值设为1.38
×
10-2
mm2。
[0344]
将梁131~梁135的长度(span)li分别向单元格c3输入。在本例中,将梁131~梁135的长度li分别设为13800mm(13.8m)。
[0345]
将作用于梁131~梁135的等分布荷载(composite stage load)wi分别向单元格c6输入。在本例中,作用于梁131~梁135的等分布荷载wi互相相等,设为28.56kn/m。
[0346]
各中间支点12a处的铅垂位移δi分别设为0m。
[0347]
在本例中假定为,板构件混凝土及钢骨的自重(构造质量
×
重力加速度,ww_sw)由在两端支点12b及中间支点12a处铰性接合的纯钢骨架构的梁13支承。该值向单元格c7输入。
[0348]
并且,假定为,在连续梁11的使用开始后承重于梁13的荷载,由在混凝土硬化后作为半刚性接合而动作的接合部(中间支点12a)及在两端支点12b处通过铰性接合而支承的组合梁(梁主体18与地板17一体地动作的梁13)支承。
[0349]
图12中示出使用本评价程序进行了评价的、作用于连续梁11的弯矩分布相对于自第1端支点12b1的距离的关系。在图12中,横轴表示从连续梁11中的第1端支点12b1朝向第2端支点12b2移动的距离(mm)。纵轴表示作用于连续梁11的弯矩分布(knm)。
[0350]
由实线示出的曲线l4表示相对于混凝土硬化后的承重荷载(等分布荷载)的弯矩分布。由虚线示出的曲线l5示出除了由曲线l4示出的值之外还考虑了基于板构件混凝土(混凝土22)及钢骨(梁主体18)的自重的弯矩分布的值。即,曲线l4表示不考虑作为构造体的连续梁11的质量的情况下的弯矩分布。
[0351]
上方部分尖的空心的三角标记(
△
)及下方部分尖的空心的三角标记(
▽
)表示梁13的弹性极限弯曲强度。空心的四角标记(
□
)表示接合部(中间支点12a及端支点12b)的弹性极限弯曲强度。
[0352]
可知,无论哪个弯矩分布,都为梁13及接合部的弹性极限弯曲强度以下。
[0353]
在图13中示出使用本评价程序进行了评价的、连续梁11的转动角分布相对于自第1端支点12b1的距离的关系。在图13中,横轴表示从连续梁11中的第1端支点12b1朝向第2端支点12b2移动的距离(mm)。纵轴表示连续梁11的转动角分布(rad)。
[0354]
在连续梁11中,在半刚性接合的中间支点12a处产生与转动刚度相应的转动角。因而,转动角分布在中间支点12a处不连续。例如,在图13中,示出第3梁133的右端处的转动角及第4梁134的左端处的转动角转动角与转动角不连续。
[0355]
此外,中间支点12a处的相邻的梁13彼此的转动角的绝对值之差根据接合部的弯矩相对于转动刚度之比而产生。具体地说,转动刚度越小、弯矩越大,则中间支点12a处的相邻的梁13彼此的转动角的绝对值之和越大。
[0356]
在图14中示出使用本评价程序进行了评价的、连续梁11的挠度分布相对于自第1端支点12b1的距离的关系。在图14中,横轴表示从连续梁11中的第1端支点12b1朝向第2端支点12b2移动的距离(mm)。纵轴表示连续梁11的挠度分布(mm)。单端成为铰性接合的第1梁131及第5梁135的最大挠度大于第2梁132、第3梁133及第4梁134的最大挠度。
[0357]
〔7.评价例2〕
[0358]
对表2~表8所示的比较例及实施例1~3的连续梁,实施了连续梁的评价方法。
[0359]
[0360]
[0361]
[0362]
[0363][0364]
如表2所示,作为连续梁的特性,比较例及实施例1~3的连续梁所具备的梁的数量n分别设为4。以下,将从第1端支点侧数起第i根的梁也称作第i梁。将从第1端支点侧数起第i个中间支点也称作第i中间支点。
[0365]
关于梁的长度,在比较例、实施例1及2中,无论哪个梁都设为15500mm(15.5m)。在实施例3中,第1梁~第4梁的长度分别设为13000mm、15500mm、14000mm、13000mm。
[0366]
在比较例及实施例1中,梁高假定为617mm。翼缘宽假定为230mm,腹板厚假定为13.1mm,翼缘厚假定为22.1mm,绕强轴的截面惯性矩假定为1120000000mm4(0.00112m4),梁的每单位长度的质量假定为140kg/m,梁的钢材的屈服强度假定为345n/mm2。
[0367]
在实施例2及3中,梁高假定为600mm。翼缘宽假定为250mm,腹板厚假定为9.0mm,翼缘厚假定为16.0mm,绕强轴的截面惯性矩假定为831000000mm4,梁的每单位长度的质量假定为104kg/m,梁的钢材的屈服强度假定为355n/mm2。
[0368]
如表3所示,作为板构件(rc板构件)的特性,无论在比较例及实施例1~3的连续梁的哪一个中,都是板构件厚度假定为130mm,承板高度假定为52mm。
[0369]
作为梁负弯的部分(梁的两端部)的加强筋,在比较例、实施例1及3中,以100mm间距配置了直径为d10的钢筋。在实施例2中,以100mm间距配置了直径为d16的钢筋。
[0370]
作为梁彼此接合的接合部的加强筋,在实施例1及3中,以100mm间距配置了直径为d10的钢筋。在实施例2中,以100mm间距配置了直径为d16的钢筋。在比较例中,在接合部没有配置加强筋。
[0371]
比较例及实施例1~3中使用的钢筋的钢材的屈服强度设为435n/mm2。
[0372]
板构件(slab)的有效宽度,基于british standards”eurocode 4:design of composite steel and concrete structures-part 1-1:general rules and rules for buildings”设定。此外,板构件的有效宽度的定义不限定于此,例如也可以基于“各種合成構造設計指針
·
同解説”,日本建筑学会等进行设定。
[0373]
在本例中,例如在比较例的连续梁中,对于第1梁~第4梁的板构件的有效宽度分别设为3294mm。在实施例1的连续梁中,对于第1梁~第4梁的板构件的有效宽设为3294mm、2713mm、2713mm、3294mm。
[0374]
如表4所示,作为连续梁的各支点处的支承条件,在比较例的连续梁中,在各端支点及各中间支点处分别设为铰性接合。此外,铰性接合的情况下的各支点处的转动刚度成为0。
[0375]
在实施例1~3的连续梁中,在各端支点处分别设为铰性接合,在各中间支点处分别设为半刚性接合。半刚性接合的转动刚度,基于表3的配筋及有效宽度,使用british standards”eurocode 4:design of composite steel and concrete structures-part 1-1:general rules and rules for buildings”中记载的方法如以下那样算出。在实施例1的连续梁中,第1中间支点~第3中间支点处的转动刚度分别算出为108knm/mrad、116knm/mrad、108knm/mrad。在实施例2的连续梁中,第1中间支点~第3中间支点处的转动刚度分别算出为192knm/mrad、242knm/mrad、192knm/mrad。在实施例3的连续梁中,第1中间支点~第3中间支点处的转动刚度分别算出为103knm/mrad、116knm/mrad、102knm/mrad。
[0376]
如表5所示,作为梁的弯曲刚度,基于表2的梁主体的截面尺寸及表3的有效宽度,将组合梁的正弯和负弯的弯曲刚度分别如下述这样算出。
[0377]
在比较例的连续梁中,无论在第1梁~第4梁中的哪一个中,都是正弯的弯曲刚度假定为555000knm2,负弯的弯曲刚度假定为308000knm2。
[0378]
在实施例1的连续梁中,在第1梁及第4梁中,正弯的弯曲刚度算出为555000knm2,负弯的弯曲刚度算出为308000knm2。在第2梁及第3梁中,正弯的弯曲刚度算出为525000knm2,负弯的弯曲刚度算出为292000knm2。
[0379]
在实施例2的连续梁中,在第1梁及第4梁中,正弯的弯曲刚度算出为433594knm2,负弯的弯曲刚度算出为241305knm2。在第2梁及第3梁中,正弯的弯曲刚度算出为413095knm2,负弯的弯曲刚度算出为232307knm2。
[0380]
在实施例3的连续梁中,在第1梁及第4梁中,正弯的弯曲刚度算出为415000knm2,
负弯的弯曲刚度算出为232000knm2。在第2梁中,正弯的弯曲刚度算出为413000knm2,负弯的弯曲刚度算出为232000knm2。在第3梁中,正弯的弯曲刚度算出为402000knm2,负弯的弯曲刚度算出为227000knm2。
[0381]
如表6所示,设定了梁及接合部的屈服弯曲强度。例如,在比较例的连续梁中,第1梁的正弯的屈服弯曲强度算出为1750knm,负弯的屈服弯曲强度算出为1415knm。在实施例1的连续梁中,第1梁的正弯的屈服弯曲强度算出为1750knm,负弯的屈服弯曲强度算出为1415knm。第1中间支点处的负弯的屈服弯曲强度算出为474knm。
[0382]
作为承重荷载,比较例及实施例1~3的连续梁的sdl(除去构造体的静载)分别算出为1.0kn/m2。ll(动载)分别算出为4.5kn/m2。
[0383]
对比较例及实施例1~3的连续梁实施连续梁的评价方法,结果,得到了表7及表8所示的结果。
[0384]
[0385][0386]
如表7所示,关于最大产生弯矩,例如在比较例的连续梁中,无论在第1梁~第4梁中的哪一个中都是在正弯为1400knm,在负弯为0knm。在各中间支点没有作用有负弯的弯矩。
[0387]
在实施例1的连续梁中,在第1梁,在正弯作用有1174knm的弯矩,在负弯作用有471knm的弯矩。在第1中间支点,在负弯作用有471knm的弯矩。
[0388]
连续梁的最大挠度在比较例的连续梁中为95mm。在实施例1~3的连续梁中,连续
梁的最大挠度分别为82mm、104mm、96mm。
[0389]
关于表8所示的“产生弯矩相对于弯曲强度的比例”,值越从0%接近100%,则意味着相对于弯曲强度越没有余裕。该比例,在比较例的连续梁中,在梁的正弯为80%。在实施例1的连续梁中,在梁的正弯为68%,在梁的负弯为34%,在梁彼此的接合部的负弯为99%。在实施例2的连续梁中,在梁的正弯为83%,在梁的负弯为49%,在梁彼此的接合部的负弯为66%。在实施例3的连续梁中,在梁的正弯为58%,在梁的负弯为37%,在梁彼此的接合部的负弯为88%。
[0390]
关于以比较例的连续梁为基准的梁的最大挠度比,值越从100%接近0%,则意味着相对于比较例的连续梁而言最大挠度越小。该比,在实施例1的连续梁中为86%。在实施例2的连续梁中为110%,在实施例3的连续梁中为101%。
[0391]
关于以比较例的连续梁为基准的梁(钢)的质量比,值越从100%接近0%,则意味着相对于比较例的连续梁而言形成梁所需的钢材的质量越小,即越是经济性的设计。
[0392]
该比,在实施例1的连续梁中为100%。在实施例2及3的连续梁中为74%。
[0393]
使用本评价程序对连续梁进行评价,结果可知,与比较例的连续梁相比,在实施例1的连续梁中,虽然梁的质量不变,但从“(82-95)/95”这一式子可得“连续梁的最大挠度减少14%”。
[0394]
与比较例的连续梁相比可知,在实施例2的连续梁中,连续梁的最大挠度根据“(104-95)/95”这一式子而增加10%,产生弯矩相对于弯曲强度的比例为80~83%而是同等大小,但梁的质量根据“(104-140)/140”这一式子而减少26%。
[0395]
与比较例的连续梁相比可知,在实施例3的连续梁中,连续梁的最大挠度为95~96mm而为同等大小,但梁的质量根据“(104-140)/140”这一式子而减少26%。
[0396]
关于钢骨梁与混凝土板构件等异种材料接合而成的梁(组合梁),根据弯曲的方向,其刚度和耐力不同。其理由在于,混凝土与钢材的应力应变关系不同,混凝土的拉伸强度比压缩强度小,材料特性依赖于力的方向。考虑这样的梁的刚度来评价弯矩分布和耐力的情况下,无法得到显性解,需要通过收敛计算求出。而且,在连续梁的端通过半刚性接合而被支承的情况下,用于确定解的式更加复杂。因此,若是在设计实务中使用,则存在过于繁琐这一问题。
[0397]
因此,在大量的连续梁的评价中,端支点处的接合状态假定为铰性接合或者刚性接合。并且,不考虑梁的刚度(板构件的合成效果)或者即便考虑也没有精度良好的评价式。因而,存在在连续梁的设计中将安全率取得大而难以得到在进行连续梁的设计时的经济效果的课题。
[0398]
与此相对,根据本实施方式的评价方法及评价程序127,多个未知数的数量与多个第1边界条件的数量相同。因而,基于作为给定条件赋予的梁13的长度及弯曲刚度、多个转动刚度、铅垂荷载及多个铅垂位移,以满足多个第1边界条件的方式求解多个未知数。根据该方法,能够求出多个未知数所包括的多个弯矩及多个转动角。
[0399]
然后,根据求出的多个弯矩及多个转动角,基于多个铅垂位移的关系式算出多个铅垂位移。根据该方法,能够根据一对端支点12b处的接合状态,更加合适地评价连续梁11的弯矩、挠度分布。因此,能够合适地评价挠度。
[0400]
通过以上的工序,能够避免连续梁11的评价成为过大评价及过小评价的情况。
[0401]
在本实施方式中,提出了利用由混凝土板构件和钢骨梁组成且正弯与负弯的弯曲刚度不同的梁构成的连续梁11在中间支点12a具备具有有限的转动刚度的接合部(半刚性接合)的情况(半刚性连续梁)的评价方法。根据该评价方法,使用接合部的弯矩的值表示任意位置处的弯矩分布、转动角分布及挠度分布。并且,通过考虑了第1边界条件的最优化计算,确定接合部的弯矩的值,能够导出设计中的必要性能(设计用弯矩分布、接合部的转动角)及梁的挠度分布。
[0402]
在解决定工序中,进行第1设计工序s14、第2设计工序、临时设计工序、解算出工序s22、残差算出工序s24及判定工序s26。通过在判定工序s26中判定位移残差是否小于阈值,能够基于设计值及位移残差来评价基于临时设计值算出的计算值。
[0403]
在判定工序s26中位移残差为阈值以上时,将代替在存储工序s20中存储了的临时设计值而在临时设计工序中赋予另外的新的临时设计值的处理、和基于该新的临时设计值进行解算出工序s22、残差算出工序s24、判定工序s26的处理设为一组处理。并且,反复进行该组处理,直到在判定工序s26中判定为位移残差小于阈值。因此,能够精度良好地算出弯矩,能够基于该弯矩求出多个转动角。
[0404]
关于铅垂位移的计算结果δ
i,calc
,使用式(24)等,通过在式(44)中设为xi=li而得到的式算出。由此,能够使用数学式精度良好地评价中间支点12a及一对端支点12b处的多个铅垂位移。
[0405]
以上,参照附图对本发明的第1实施方式进行了详述,但具体的构成不限于该实施方式,也包括不脱离本发明的要旨的范围的构成的变更、组合、删除等。而且,当然可以将在各实施方式中示出的构成分别适当组合来利用。
[0406]
例如,在所述实施方式的评价方法中,也可以不基于判定工序s26中的判定向解设定工序s28或临时设计工序转移。在该情况下,在评价方法中不进行存储工序s20。
[0407]
在梁13中,也可以设为正弯的弯曲刚度与负弯的弯曲刚度互相相等。
[0408]
端支承部设为第2大梁31,但端支承部也可以是其他的建筑物等刚体。
[0409]
(第2实施方式)
[0410]
接着,一边参照图15~图24,一边说明本发明的第2实施方式的组合梁的评价方法,但对与所述实施方式相同的部位标注相同的附图标记并省略其说明,仅对不同的点进行说明。
[0411]
〔1.两端半刚性接合而成的组合梁〕
[0412]
本实施方式的组合梁的评价方法,例如用于对构成图15所示的建筑物201的组合梁211进行评价。
[0413]
在本例中,组合梁211具备地板212和梁(小梁)213。此外,组合梁211的构成不限定于本例。
[0414]
地板212是所谓的合成板构件,由梁13从下方支承。地板212具备承板216和配置于承板216上的rc(reinforced concrete)板构件(slab)217。
[0415]
承板216的凹凸形状在沿着水平面的、与梁213延伸的方向正交的方向上延伸。
[0416]
rc板构件217具备混凝土218和钢筋219。混凝土218形成为上下方向成为厚度方向的板状。混凝土218由承板216从下方支承。
[0417]
钢筋219沿着水平面延伸,埋设于混凝土218内。例如,钢筋219配置成在俯视下为
格子状。
[0418]
梁213由h型钢形成,沿着水平面延伸。在梁213的上翼缘固定有螺柱221的下端部。螺柱221贯通承板216。螺柱221的上端部埋设于混凝土218内。
[0419]
梁213的两端分别半刚性接合于沿着水平面延伸的大梁224。大梁224在与梁213正交的方向上延伸。梁213与大梁224的半刚性接合例如通过剪力板225及螺栓226等进行。
[0420]
大梁224的端部由柱228从下方支承。
[0421]
以下,对这样构成的组合梁211的评价方法进行说明。
[0422]
〔2.两端半刚性接合而成的组合梁的挠度的微分方程式(精确解)〕
[0423]
以下的研究全部限定于组合梁的弹性范围。
[0424]
如图16所示,将组合梁示意化。
[0425]
沿着组合梁向右规定坐标x(mm)。将组合梁的左端的位置规定为坐标x的原点。组合梁的长度假定为l(mm)。作为边界条件(前提条件),组合梁假定为两端分别半刚性接合。假定为在组合梁,在全长作用有向下的等分布荷载w(n/mm:牛顿每毫米)。
[0426]
将组合梁的两端的接合部的转动刚度设为sj(nmm/rad:牛顿毫米每弧度),关于组合梁的端处的转动角,将图16所示的主视中的顺时针设为正而设为θj(rad:弧度)。
[0427]
此时,组合梁的端处的弯矩的绝对值(端部的半刚性接合部的力矩。以下,称作半刚接力矩。)mj(nmm)由式(111)表示。
[0428]
[数学式28]
[0429]
mj=sj|θj|
…
(111)
[0430]
关于组合梁的沿着坐标x的弯矩的分布m(x)(nmm),当将在组合梁的梁的下翼缘作用有拉伸应力时的弯矩设为正的情况下,根据力的平衡条件而由式(112)表示。
[0431]
[数学式29]
[0432][0433]
组合梁的曲率可使用作用于组合梁的弯矩m(nmm)和组合梁的弯曲刚度ei(nmm2)来表示。组合梁由于混凝土的作用而正弯(向下凸)的弯曲刚度与负弯(向上凸)的弯曲刚度彼此不同。因而,将组合梁的正弯的弯曲刚度设为eis(nmm2),将组合梁的负弯的弯曲刚度设为eih(nmm2)。并且,如图17所示,在坐标x为0以上且l1以下的范围及l2以上且l以下的范围内,设为组合梁负弯。其中,l1大于0,l2大于l1且小于l。在坐标x为l1以上且l2以下的范围内,设为组合梁正弯。
[0434]
此时,式(112)成为0时的x的解为l1及l2。
[0435]
组合梁的曲率分为组合梁正弯的区域和组合梁负弯的区域而由式(113)及式(114)表示。
[0436]
[数学式30]
[0437]
[0438][0439]
若关于x求解使式(112)的右边等于0而得到的式,则l1及l2如式(115)及式(116)那样求出。
[0440]
[数学式31]
[0441][0442][0443]
接着,关于组合梁的转动角θ(x)(rad),将相对于水平面顺时针的转动设为正( )来进行说明。转动角θ(x)通过将式(113)及式(114)的曲率以坐标x进行积分等而得到。进而,转动角θ(x)考虑在坐标x为0时转动角θ成为θj的边界条件,使用式(119),如式(120)~式(122)那样表示。
[0444]
[数学式32]
[0445][0446][0447][0448][0449]
接着,关于在组合梁产生的挠度δ(x)(mm),将铅垂向下设为正( )来进行说明。挠度δ(x)通过将式(120)~式(122)的转动角θ以坐标x进行积分等而得到。进而,关于挠度δ(x),考虑在坐标x为0时挠度δ(x)成为0的边界条件,使用式(125)及式(126),如式(127)~式(129)那样表示。
[0450]
[数学式33]
[0451]
[0452][0453][0454][0455][0456]
以上求出的式(127)~式(129),以包括半刚接力矩mj及转动角θj的形式表示。但是,仅仅这样的话,对于任意的转动刚度sj,半刚接力矩mj及转动角θj无法唯一地确定。在此,若进一步使用在坐标x为(l/2)时转动角θ成为0rad这一变形的符合条件,则根据式(111)及式(121),转动刚度sj与转动角θj的关系如式(130)那样表示。
[0457]
[数学式34]
[0458][0459]
另外,使用在坐标x为l时挠度δ(x)成为0这一变形的符合条件。于是,根据式(111)及式(129),转动刚度sj与转动角θj的关系如式(131)那样表示。
[0460]
此外,式(130)与式(131)等价。
[0461]
[数学式35]
[0462][0463]
在组合梁产生的挠度的最大值δ
max
,成为式(128)中的坐标x为(l/2)时的值。
[0464]
为了使用所述式(130)或式(131)算出挠度的最大值δ
max
,需要使用式(130)或式
(131)进行收敛计算来算出转动角θj。进而,需要使用式(128)算出坐标x为(l/2)时的挠度δ(x)。
[0465]
〔3.两端半刚性接合而成的组合梁的挠度的近似式〕
[0466]
发明人发现,通过基于作为无量纲化了的值的无量纲化转动刚度及无量纲化弯曲刚度评价挠度的最大值δ
max
,会成为以下这样。即,无论组合梁的规格如何,均能够通用性高且不进行收敛计算就精度良好地算出端部弯矩及挠度的最大值δ
max
。
[0467]
以下,对能够利用显函数算出端部弯矩及挠度的最大值的近似式进行说明。
[0468]
如式(135)及式(136)那样,规定了无量纲化弯曲刚度αs及无量纲化转动刚度αj。
[0469]
[数学式36]
[0470][0471][0472]
即,无量纲化弯曲刚度αs规定为组合梁的正弯的弯曲刚度及组合梁的负弯的弯曲刚度之比。在本例中,无量纲化弯曲刚度αs规定为组合梁的正弯的弯曲刚度eis相对于组合梁的负弯的弯曲刚度eih之比。在该情况下,无量纲化弯曲刚度αs一般取1以上的值。这是因为,通常,地板处于梁的铅垂方向上方,地板的混凝土的压缩阻力比拉伸阻力大。因而,与地板的混凝土被拉伸的负弯相比,针对被压缩的正弯,地板的阻力变大。在通常的组合梁的规格中,无量纲化弯曲刚度αs为10以下,在更通常使用的组合梁中,无量纲化弯曲刚度αs为3以下。
[0473]
此外,无量纲化弯曲刚度αs也可以规定为组合梁的负弯的弯曲刚度eih相对于组合梁的正弯的弯曲刚度eis之比。
[0474]
无量纲化转动刚度αj是将组合梁的端处的转动刚度除以组合梁的每单位长度的弯曲刚度而得到的值。
[0475]
进而,规定了铰接力矩mo、半刚接力矩mj、刚接力矩m
jr
、无量纲化接合部力矩β
mj
及无量纲化刚接力矩β
mj,rigid
。
[0476]
铰接力矩mo在正弯的弯曲刚度与负弯的弯曲刚度彼此不同的组合梁中假定为两端分别铰性接合并在全长作用有等分布荷载时规定。铰接力矩mo意味着作用于组合梁的弯矩的最大值的情况。铰接力矩mo由式(137)表示。
[0477]
此外,铰接力矩mo等于正弯的弯曲刚度与负弯的弯曲刚度互相相等的梁中的以下的值。铰接力矩mo等于设为两端分别铰性接合并在全长作用有等分布荷载时的作用于所述梁的端的弯矩。具体地说,铰接力矩mo是基于(wl2/8)这一式子的值。
[0478]
[数学式37]
[0479][0480]
如上述那样,半刚接力矩mj是组合梁的端处的弯矩的绝对值。更具体地说,半刚接力矩mj意味着在正弯的弯曲刚度与负弯的弯曲刚度彼此不同的组合梁中,作用于两端分别半刚性接合并在全长作用有等分布荷载的组合梁的端的弯矩。半刚接力矩mj使用利用式(130)或式(131)进行收敛计算而算出的转动角θj,由式(138)表示。
[0481]
[数学式38]
[0482]
mj=sj|θj|
…
(138)
[0483]
刚接力矩m
jr
意味着正弯的弯曲刚度与负弯的弯曲刚度彼此不同的组合梁中的以下的值。刚接力矩m
jr
意味着作用于设为两端分别刚性接合并在全长作用有等分布荷载时的组合梁的端的弯矩。
[0484]
此外,本实施方式的组合梁,是正弯的弯曲刚度与负弯的弯曲刚度彼此不同的梁。为了便于说明,假定正弯的弯曲刚度与负弯的弯曲刚度互相相等的比较例的梁。在该比较例的梁中,在设为两端分别刚性接合并在全长作用有等分布荷载时,刚接力矩m
jr
是基于(wl2/12)这一式子的值。
[0485]
无量纲化接合部力矩β
mj
是将半刚接力矩mj除以铰接力矩mo而得到的值,由式(139)表示。
[0486]
[数学式39]
[0487][0488]
无量纲化刚接力矩β
mj,rigid
是将刚接力矩m
jr
除以铰接力矩mo而得到的值,由式(140)表示。
[0489]
[数学式40]
[0490][0491]
在此,评价了所述无量纲化转动刚度αj、无量纲化弯曲刚度αs等指标。因而,对于表9所示的情形1~情形6的规格的组合梁,使无量纲化转动刚度αj、无量纲化弯曲刚度αs发生变化而试算了无量纲化接合部力矩β
mj
。
[0492]
此外,在情形1~情形5中组合梁的两端半刚性接合,在情形6中组合梁的两端刚性接合。
[0493][0494]
在情形1中,将组合梁的长度l假定为10.0m(10000mm)。若将负弯的弯曲刚度eih假定为229397knm2,将等分布荷载w假定为28.6kn/m(28.6n/mm),则铰接力矩mo根据式(137)算出为357knm。在情形1中,使无量纲化转动刚度αj,从最小值0.00到最大值50.00,以1.00标度,变化为51种值。即,将无量纲化转动刚度αj设为0.00、1.00、2.00、
‥
、50.00的值。使无量纲化弯曲刚度αs,从最小值1.00到最大值6.00,以0.10标度,变化为51种值。即,将无量纲化弯曲刚度αs设为1.00、1.10、1.20、
‥
、6.00的值。在情形1中,试算了使无量纲化转动刚度αj及无量纲化弯曲刚度αs的值变化的、基于(51
×
51)这一式子的2601种情况。
[0495]
在情形2中,以情形1为基准,使组合梁的长度l变化为15.0m。铰接力矩mo根据式(137)算出为803knm。在情形2中,与情形1同样使无量纲化转动刚度αj及无量纲化弯曲刚度αs变化,试算了2601种情况。
[0496]
在情形3中,使情形2中的无量纲化转动刚度αj的标度及无量纲化弯曲刚度αs的最大值及标度变化。即,在情形3中,使无量纲化转动刚度αj,从最小值0.00到最大值50.00,以0.01标度,变化为5001种值。即,将无量纲化转动刚度αj设为0.00、0.01、0.02、
‥
、50.00的值。使无量纲化弯曲刚度αs,从最小值1.00到最大值1.06,以0.01标度,变化为7种值。即,将无量纲化弯曲刚度αs设为1.00、1.01、1.02、
‥
、1.06的值。在情形3中,试算了使无量纲化转动刚度αj及无量纲化弯曲刚度αs的值变化的、基于(5001
×
7)这一式子的35007种情况。在情形3中,对于情形2中的无量纲化转动刚度αj及无量纲化弯曲刚度αs的一部分的范围,更详细地进行了试算。
[0497]
在情形4中,以情形1为基准,使组合梁的长度l变化为8.4m。若将负弯的弯曲刚度eih假定为214311knm2,则铰接力矩mo根据式(137)算出为252knm。在情形4中,使无量纲化转动刚度αj,从最小值0.00到最大值100.00,以0.50标度,变化为201种值。即,将无量纲化转动刚度αj设为0.00、0.50、1.00、
‥
、100.00的值。使无量纲化弯曲刚度αs,从最小值1.00到最大值1.30,以0.05标度,变化为7种值。即,将无量纲化弯曲刚度αs设为1.00、1.05、1.10、
‥
、1.30的值。在情形4中,试算了使无量纲化转动刚度αj及无量纲化弯曲刚度αs的值变化的、基于(201
×
7)这一式子的1407种情况。
[0498]
在情形5中,以情形1为基准,使组合梁的长度l变化为13.8m。铰接力矩mo根据式(137)算出为680knm。在情形5中,无量纲化转动刚度αj的值与情形4同样地变化。使无量纲化弯曲刚度αs,从最小值1.00到最大值4.00,以0.50标度,变化为7种值。即,将无量纲化弯曲刚度αs设为1.00、1.50、2.00、
‥
、4.00的值。在情形5中,试算了使无量纲化转动刚度αj及无量纲化弯曲刚度αs的值变化的、基于(201
×
7)这一式子的1407种情况。
[0499]
在情形1~情形5中,合计试算了43023种情况。
[0500]
在情形6中,使情形2中的无量纲化转动刚度αj及无量纲化弯曲刚度αs的最大值变化。在情形6中,使无量纲化转动刚度αj无限大(∞),即使转动刚度sj无限大,设为组合梁的两端刚性接合。使无量纲化弯曲刚度αs,从最小值1.00到最大值51.00,以0.10标度,变化为501种值。即,将无量纲化弯曲刚度αs设为1.00、1.10、1.20、
‥
、51.00的值。
[0501]
在图18中示出情形1~情形5中的无量纲化转动刚度αj与无量纲化接合部力矩β
mj
的关系。在图18中,横轴表示无量纲化转动刚度αj,纵轴表示无量纲化接合部力矩β
mj
。
[0502]
直线l11是正弯的弯曲刚度与负弯的弯曲刚度互相相等的通常的梁中的无量纲化刚接力矩β
mj,rigid,u
。在通常的梁中,将长度设为l(mm),将等分布荷载设为w(n/mm)。在该情况下,在通常的梁中,刚接力矩m
jr
为(wl2/12),铰接力矩mo为(wl2/8),所以,无量纲化刚接力矩β
mj,rigid,u
根据{(wl2/12)/(wl2/8)}这一式子,成为2/3(约0.667)的值。
[0503]
将情形1的试算结果以空心的正方形标记表示。同样,将情形2的试算结果以空心的三角形标记表示,将情形3的试算结果以空心的圆形标记表示。将情形4的试算结果以空心的菱形标记表示,将情形5的试算结果以叉标记表示。
[0504]
随着横轴的无量纲化转动刚度αj变大,组合梁的两端的接合接近刚性接合。随着无量纲化弯曲刚度αs接近1,无量纲化接合部力矩β
mj
接近情形1~情形5的上限的包络线即曲线l12。
[0505]
而且,随着无量纲化转动刚度αj变大,组合梁的两端的接合接近刚性接合。于是,无量纲化接合部力矩β
mj
收拢于作为上限值的直线l11表示的无量纲化刚接力矩β
mj,rigid
的
值。
[0506]
关于通过曲线l12表示的无量纲化接合部力矩β
mj
,考虑函数的形状和无量纲化转动刚度αj成为0及无限大时的无量纲化接合部力矩β
mj
的极限,认为能够以式(142)近似。其中,e为纳皮尔数(2.718
‥
)。
[0507]
[数学式41]
[0508][0509]
在式(142)中,k为系数。变量α
j,t
为无量纲化接合部力矩β
mj
取无量纲化刚接力矩β
mj,rigid
的一半的值时的无量纲化转动刚度αj。以下,提出无量纲化刚接力矩β
mj,rigid
、系数k、变量α
j,t
的确定方法。
[0510]
〔4.近似式的确定〕
[0511]
〔4.1.无量纲化刚接力矩的支配变量〕
[0512]
在式(130)中,在组合梁的两端刚性接合的情况下,假定转动刚度sj为无限大(假定无量纲化转动刚度αj为无限大)。进而,若将方程式使用无量纲化刚接力矩β
mj,rigid
、无量纲化弯曲刚度αs、铰接力矩mo表示为式子,则成为式(146)那样。
[0513]
[数学式42]
[0514][0515]
式(146)如式(147)及式(148)那样变形。进而,式(147)及式(148)使用式(149)而如式(150)那样变形。
[0516]
[数学式43]
[0517][0518][0519][0520][0521]
根据以上可知,无量纲化刚接力矩β
mj,rigid
严格地说是基于式(150)的3次方程式的解。而且可知,无量纲化刚接力矩β
mj,rigid
的解仅依赖于无量纲化弯曲刚度αs,不依赖于组合梁的长度l、等分布荷载w等。因此,使用作为3次方程式的解法的卡尔达诺公式求出式(50)的解,利用其中的实数解,能够得到无量纲化刚接力矩β
mj,rigid
的精确解。
[0522]
此外,关于所述情形6的无量纲化弯曲刚度αs与无量纲化刚接力矩β
mj,rigid
的试算结果的关系如图19所示那样。在图19中,横轴表示无量纲化弯曲刚度αs。纵轴表示无量纲化刚接力矩β
mj,rigid
。
[0523]
〔4.2.无量纲化刚接力矩的近似式〕
[0524]
无量纲化刚接力矩β
mj,rigid
严格地说能够作为基于式(150)的3次方程式的实数解而得到。但是,如图19所示,在无量纲化弯曲刚度αs为约10以下的范围内,无量纲化刚接力矩β
mj,rigid
被认为能够以无量纲化弯曲刚度αs的常用对数的线性式近似。
[0525]
如前述那样,若是一般的组合梁的板构件的厚度,则无量纲化弯曲刚度αs为10以下。因而,在图19中,将无量纲化弯曲刚度αs为10以下的范围以线性式近似,将无量纲化刚接力矩β
mj,rigid
以式(153)近似。
[0526]
[数学式44]
[0527][0528]
在式(153)中,基于无量纲化弯曲刚度αs,利用显函数算出无量纲化刚接力矩β
mj,rigid
。
[0529]
将式(153)在图19中以直线l14示出。在无量纲化弯曲刚度αs为10以下的范围内,直线l14与试算结果重叠。
[0530]
此外,关于情形6,将无量纲化刚接力矩β
mj,rigid
的基于式(153)的近似解与基于式(150)的精确解进行比较而示于图20。在图20中,横轴表示基于式(153)的无量纲化刚接力矩β
mj,rigid
的近似解,纵轴表示基于式(150)的无量纲化刚接力矩β
mj,rigid
的精确解(无量纲化刚接力矩β
mj,rigid,theo
)。若无量纲化刚接力矩β
mj,rigid
的近似解及精确解互相一致,则试算结果的描点配置于直线l16上。
[0531]
在无量纲化刚接力矩β
mj,rigid
的近似解超过0.4时,无量纲化刚接力矩β
mj,rigid
的近似解与精确解大概一致。但是,在无量纲化刚接力矩β
mj,rigid
的近似解为0.4以下时,也可以以式(154)修正无量纲化刚接力矩β
mj,rigid
。关于式(154),在图20中将无量纲化刚接力矩β
mj,rigid
取为横轴,将无量纲化刚接力矩β
mj,rigid,theo
取为纵轴,以曲线l17示出。无量纲化刚接力矩β
mj,rigid,theo
与无量纲化刚接力矩β
mj,rigid
的精确解重叠。
[0532]
[数学式45]
[0533][0534]
即,在无量纲化刚接力矩β
mj,rigid
的近似解为0.4以下时,在式(142)中,也可以代替无量纲化刚接力矩β
mj,rigid
,使用基于无量纲化刚接力矩β
mj,rigid
通过式(154)算出的无量纲化刚接力矩β
mj,rigid,theo
。
[0535]
接着,求出系数k及变量α
j,t
的近似式。
[0536]
关于各无量纲化弯曲刚度αs,利用差分进化法求出系数k。将求出的系数k与无量纲化弯曲刚度αs的关系示于图21。系数k在高阶上依赖于无量纲化弯曲刚度αs,以式(155)近似。
[0537]
同样,关于各无量纲化弯曲刚度αs,利用差分进化法求出变量α
j,t
。将求出的变量α
j,t
与无量纲化弯曲刚度αs的关系示于图22。变量α
j,t
在高阶上依赖于无量纲化弯曲刚度αs,以式(156)近似。
[0538]
[数学式46]
[0539][0540][0541]
将式(155)在图21中以曲线l18示出。在研究范围内,曲线l18与试算结果高度近似。同样,将式(156)在图22中以曲线l19示出。在研究范围内,曲线l19与试算结果高度近似。
[0542]
如前述那样,当无量纲化刚接力矩β
mj,rigid
、系数k、变量α
j,t
根据无量纲化弯曲刚度αs算出后,通过式(142)算出无量纲化接合部力矩β
mj
。即,基于算出的无量纲化弯曲刚度αs、无量纲化转动刚度αj及无量纲化刚接力矩β
mj,rigid
,利用式(142)的显函数算出无量纲化接合部力矩β
mj
。更详细地进行说明的话,使用式(153)、式(155)、式(156),通过式(142)算出无量纲化接合部力矩β
mj
,。或者,也可以代替式(153),将使用式(153)及式(154)算出的无量纲化刚接力矩β
mj,rigid,theo
代入到式(142)的无量纲化刚接力矩β
mj,rigid
而算出无量纲化接合部力矩β
mj
。
[0543]
〔5.使用了近似式的挠度的最大值的计算式〕
[0544]
接着,使用导出的挠度函数,将组合梁的中央处的最大挠度(挠度的最大值)δ
max
变换为无量纲化接合部力矩β
mj
及铰接力矩mo的式子。
[0545]
首先,包括组合梁的中央的正弯区域的挠度函数为所述式(128)。挠度的最大值δ
max
为式(128)中的x=(l/2)时的值。
[0546]
在此,式(115)及式(116)中的l1及l2如式(160)及式(161)那样,可由无量纲化接合部力矩β
mj
、铰接力矩mo及半刚接力矩mj的式表示。其中,l1及l2是组合梁的弯矩成为零的点,满足式(162)。
[0547]
[数学式47]
[0548][0549][0550]
o≤l1<l2≤l
…
(162)
[0551]
若将式(128)由无量纲化弯曲刚度αs、无量纲化转动刚度αj及无量纲化接合部力矩β
mj
表示,则成为如式(164)那样。
[0552]
[数学式48]
[0553][0554]
若将式(160)代入到式(119)及式(126),则得到式(166)及式(167)。若将x=(l/2)代入到式(125),则得到式(168)。
[0555]
[数学式49]
[0556][0557][0558][0559]
通过在式(164)中设为x=(l/2),使用式(166)~式(168),挠度的最大值δ
max
能够以式(170)求出。
[0560]
[数学式50]
[0561][0562]
若使用式(170),则能够基于算出的无量纲化弯曲刚度αs、无量纲化转动刚度αj、无量纲化接合部力矩β
mj
等,利用显函数算出挠度的最大值δ
max
。
[0563]
另一方面,若将求出的组合梁的端处的弯矩mj(半刚接力矩mj)代入到所述式(112),则求出组合梁的力矩分布的函数。
[0564]
作用于组合梁的端的弯矩即端部弯矩,是在组合梁的力矩分布的函数中,将x=0、l代入时的值。具体地说,能够从将所述式(139)变形而得到的式(171)直接求出弯矩mj。
[0565]
[数学式51]
[0566]
mj=β
mj
×
m0…
(171)
[0567]
此外,无量纲化接合部力矩β
mj
及铰接力矩mo能够使用作为给定条件的无量纲化转动刚度αj、无量纲化弯曲刚度αs、作为设计的要求值(给定条件)的组合梁的长度l及等分布荷载w,利用所述式(142)及式(137)等的显函数算出。
[0568]
而且,关于式(142)中的系数k、变量α
j,t
及无量纲化刚接力矩β
mj,rigid
,能够利用所述式(155)、式(156)及式(153)的显函数算出。
[0569]
此外,在通过式(153)计算出的无量纲化刚接力矩β
mj,rigid
为0.4以下时,在式(142)中,也可以代替无量纲化刚接力矩β
mj,rigid
,使用基于无量纲化刚接力矩β
mj,rigid
通过式(154)算出的无量纲化刚接力矩β
mj,rigid,theo
。
[0570]
组合梁的中央处的最大挠度即挠度的最大值δ
max
,能够将通过式(142)算出的无量
纲化接合部力矩β
mj
及给定条件代入到式(170)而显性地求出。
[0571]
如以上那样,在本实施方式的组合梁的评价方法中,基于无量纲化转动刚度αj及无量纲化弯曲刚度αs,利用显函数算出端部弯矩及挠度的最大值δ
max
。
[0572]
〔6.近似式的精度验证〕
[0573]
关于表9的情形1~情形5,将基于式(142)的无量纲化接合部力矩β
mj
的近似解与基于式(153)、式(155)、式(156)的无量纲化接合部力矩β
mj
的精确解进行比较而示于图23。在图23中,横轴表示无量纲化接合部力矩β
mj
的精确解。纵轴表示无量纲化接合部力矩β
mj
的近似解。若无量纲化接合部力矩β
mj
的近似解及精确解互相一致,则试算结果的描点配置于直线l21上。根据图23所示的结果可知,无量纲化接合部力矩β
mj
的近似解及精确解以实用上足够的精度一致。
[0574]
另外,关于挠度的最大值δ
max
,将基于使用了无量纲化接合部力矩β
mj
的近似解的式(170)的近似解与精确解比较而示于图24。在图24中,也一并示出情形6的试算结果。将情形6的试算结果以空心的长方形标记表示。根据图24所示的结果可知,挠度的最大值δ
max
的近似解及精确解以实用上足够的精度一致。
[0575]
如以上说明的那样,基于无量纲化转动刚度αj及无量纲化弯曲刚度αs,评价了挠度的最大值δ
max
。结果可知,无论组合梁211的规格如何,均能够通用性高且精度良好地算出挠度的最大值δ
max
。
[0576]
此外,也可以基于利用本实施方式的组合梁的评价方法算出的端部弯矩及挠度的最大值,设计新的组合梁。即,也可以使用本实施方式的组合梁的评价方法来实施组合梁的设计方法。
[0577]
如以上说明的那样,在本实施方式的组合梁的评价方法中,发明人基于无量纲化转动刚度αj及无量纲化弯曲刚度αs评价了端部弯矩及挠度的最大值δ
max
。结果,发现了,无论组合梁211的规格如何,均能够利用显函数而通用性高且精度良好地算出端部弯矩及挠度的最大值δ
max
。
[0578]
通过基于无量纲化转动刚度αj及无量纲化弯曲刚度αs利用显函数算出组合梁211的端部弯矩及挠度的最大值δ
max
,由此,不进行收敛计算就能够算出组合梁211的端部弯矩及挠度的最大值δ
max
。
[0579]
另外,基于无量纲化弯曲刚度αs及式(153)利用显函数算出无量纲化刚接力矩β
mj,rigid
,基于算出的无量纲化刚接力矩β
mj,rigid
、无量纲化转动刚度αj、无量纲化弯曲刚度αs及式(142),利用显函数算出所述无量纲化接合部力矩β
mj
。进而,基于算出的无量纲化接合部力矩β
mj
及式(170)等,利用显函数算出端部弯矩及挠度的最大值δ
max
。这样一来,不进行收敛计算就能够算出组合梁211的端部弯矩及挠度的最大值δ
max
。
[0580]
使用式(153)、式(155)、式(156),通过式(142)算出无量纲化接合部力矩β
mj
。因而,利用这些式,不进行收敛计算就能够精度良好地算出无量纲化接合部力矩β
mj
。因此,能够合适地评价挠度。
[0581]
在无量纲化刚接力矩β
mj,rigid
为0.4以下时,在式(142)中,代替无量纲化刚接力矩β
mj,rigid
,使用基于无量纲化刚接力矩β
mj,rigid
通过式(154)算出的无量纲化刚接力矩β
mj,rigid,theo
。在无量纲化刚接力矩β
mj,rigid
为0.4以下的情况下,无量纲化刚接力矩β
mj,rigid
相对于精确解误差变大。即便是该情况下,通过代替无量纲化刚接力矩β
mj,rigid
而使用无量纲
化刚接力矩β
mj,rigid,theo
,能够更加精度良好地算出无量纲化刚接力矩。
[0582]
而且,例如在具有多个组合梁的构造体的动态解析的收敛计算中,无需用于算出作为构成构造体的部材的组合梁的弯矩的收敛计算。因而,在构造体的动态解析中不再需要进行双重的收敛计算,能够大幅缩短计算时间。而且,在例如将组合梁的截面积设为目的函数,将挠度、弯矩等设计条件设为限制条件,进行将目的函数最小化的最优化计算的情况下,存在以下的优点。即,无需进行用于算出作为限制条件的挠度、弯矩的收敛计算,不再需要对于目的函数的最优化进行双重的收敛计算,能够大幅缩短计算时间。
[0583]
以上,参照附图,对本发明的第2实施方式进行了详述,但具体的构成不限于该实施方式,也包括不脱离本发明的要旨的范围的构成的变更、组合、删除等。
[0584]
例如,在所述实施方式的组合梁的评价方法中,只要基于无量纲化转动刚度αj及无量纲化弯曲刚度αs利用显函数算出弯矩mj及挠度的最大值δ
max
即可。
[0585]
另外,此时,也可以进行以下这样的步骤。即,基于无量纲化弯曲刚度αs,利用显函数算出无量纲化刚接力矩β
mj,rigid
。基于算出的无量纲化刚接力矩β
mj,rigid
、无量纲化转动刚度αj及无量纲化弯曲刚度αs,利用显函数算出无量纲化接合部力矩β
mj
。然后,基于算出的无量纲化接合部力矩β
mj
,利用显函数算出弯矩mj及挠度的最大值δ
max
。
[0586]
以上,参照附图对本发明的第1实施方式及第2实施方式进行了详述,但具体的构成不限于该实施方式,也包括不脱离本发明的要旨的范围的构成的变更、组合、删除等。而且,当然可以将在各实施方式中示出的构成分别适当组合来利用。
[0587]
产业上的可利用性
[0588]
根据本发明,能够提供连续梁的评价方法、连续梁的评价程序及组合梁的评价方法。因此,产业上的可利用性大。
[0589]
附图标记说明
[0590]
11 连续梁
[0591]
12a 中间支点
[0592]
12b 端支点
[0593]
13 梁(小梁)
[0594]
27 第1大梁(中间支承部)
[0595]
31 第2大梁(端支承部)
[0596]
101 评价装置
[0597]
112 解决定部
[0598]
211 组合梁
[0599]mj 半刚接力矩
[0600]mjr 刚接力矩
[0601]mo 铰接力矩
[0602]
s11,s36,s46,s56,s66,s76 评价方法(连续梁的评价方法)
[0603]
s12,s37,s47,s57,s67,s77 解决定工序
[0604]
s14 第1设计工序
[0605]
s16,s39,s49,s59,s69,s79 第2设计工序
[0606]
s18,s41,s51,s61,s81 临时设计工序
[0607]
s20 存储工序
[0608]
s22 解算出工序
[0609]
s24 残差算出工序
[0610]
s26 判定工序
[0611]
α
j 无量纲化转动刚度
[0612]
α
s 无量纲化弯曲刚度
[0613]
β
mj 无量纲化接合部力矩
[0614]
β
mj,rigid
,β
mj,rigid,theo 无量纲化刚接力矩
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
