技术特征:
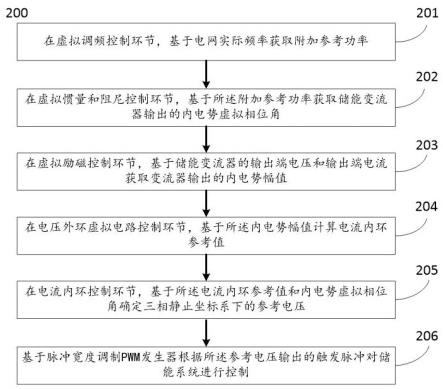
1.一种基于构网型变流器的储能系统控制方法,其特征在于,所述方法包括:在虚拟调频控制环节,基于电网实际频率获取附加参考功率;在虚拟惯量和阻尼控制环节,基于所述附加参考功率获取储能变流器输出的内电势虚拟相位角;在虚拟励磁控制环节,基于储能变流器的输出端电压和输出端电流获取变流器输出的内电势幅值;在电压外环虚拟电路控制环节,基于所述内电势幅值计算电流内环参考值;在电流内环控制环节,基于所述电流内环参考值和内电势虚拟相位角确定三相静止坐标系下的参考电压;基于脉冲宽度调制pwm发生器根据所述参考电压输出的触发脉冲对储能系统进行控制。2.根据权利要求1所述的方法,其特征在于,所述在虚拟调频控制环节,基于电网实际频率获取附加参考功率,包括:在虚拟调频控制环节,将所述电网实际频率与预设参考频率进行比较,获取频率偏差绝对值;当所述频率偏差绝对值大于等于预设频率死区宽度阈值时,利用如下公式确定所述附加参考功率,包括:,其中,为附加参考功率;为预设参考频率;f为电网实际频率;为下垂系数。3.根据权利要求2所述的方法,其特征在于,所述方法还包括:当所述频率偏差绝对值小于预设频率死区宽度阈值时,确定所述附加参考功率为0。4.根据权利要求1所述的方法,其特征在于,所述在虚拟惯量和阻尼控制环节,基于所述附加参考功率获取储能变流器输出的内电势虚拟相位角,包括:,,其中,为储能变流器输出的内电势虚拟相位角;j为虚拟转动惯量;为变流器输出内电势虚拟角速度;为对应于传统同步机的输入机械功率;p为变流器实际输出有功功率;为等效虚拟阻尼系数;为系统额定角速度;为有功参考指令;为附加参考功率;为预设参考频率;f为电网实际频率;为下垂系数;d为虚拟阻尼系数;为隔直环节时间常数;和分别为第一移相环节时间常数和第二移相环节时间常数;为转速偏差放大倍数;s为拉普拉斯算子;t为时间。5.根据权利要求1所述的方法,其特征在于,所述在虚拟励磁控制环节,基于储能变流
器的输出端电压和输出端电流获取变流器输出的内电势幅值,包括:其中,为内电势幅值;k为调节器增益;为比例积分选择因子;和分别为第一电压调节器时间常数和第二电压调节器时间常数;为预设励磁调压器参考电压阈值;v为虚拟励磁调压器实际电压信号;为d轴的电流内环参考值;为滤波器时间常数;u为储能变流器端电压;为变流器输出端电流;为调差电阻,为调差电抗;j表示复数;为励磁绕组时间常数;为暂态电势;为与励磁电压呈线性关系的强制空载电动势;为同步电抗;为d轴暂态电抗;s为拉普拉斯算子。6.根据权利要求1所述的方法,其特征在于,所述在电压外环虚拟电路控制环节,基于所述内电势幅值计算电流内环参考值,包括:,其中,和分别为在d轴和q轴下的电流内环参考值;和分别为风机在d轴和q轴的虚拟内电势,,,为内电势幅值;和分别为风机在d轴和q轴的实测端电压;为支路总阻抗,r和x均为真实阻抗参数,和均为虚拟阻抗参数;j表示复数。7.根据权利要求1所述的方法,其特征在于,所述在电流内环控制环节,基于所述电流内环参考值和内电势虚拟相位角确定三相静止坐标系下的参考电压,包括:在电流内环控制环节,基于所述电流内环参考值确定内电势控制输出信号,包括:,其中,和分别为在d轴和q轴下的内电势控制输出信号;和分别为在d轴和q轴下的变流器端电压;和分别为在d轴和q轴下变流器注入电网的电流实际值;和分别为在d轴和q轴下的电流内环参考值;为变流器输出内电势虚拟角速度;l为输出线路上的电感;和分别构成为在q轴和d轴下的电流状态反馈量;和均为pi控制参数;s为拉普拉斯算子;基于所述内电势虚拟相位角对所述内电势控制输出信号进行派克反变换,以获取三相静止坐标系下的参考电压。8.一种基于构网型变流器的储能系统控制系统,其特征在于,所述系统包括:虚拟调频控制模块,用于在虚拟调频控制环节,基于电网实际频率获取附加参考功率;虚拟惯量和阻尼控制模块,用于在虚拟惯量和阻尼控制环节,基于所述附加参考功率
获取储能变流器输出的内电势虚拟相位角;虚拟励磁控制模块,用于在虚拟励磁控制环节,基于储能变流器的输出端电压和输出端电流获取变流器输出的内电势幅值;电压外环虚拟电路控制模块,用于在电压外环虚拟电路控制环节,基于所述内电势幅值计算电流内环参考值;电流内环控制模块,用于在电流内环控制环节,基于所述电流内环参考值和内电势虚拟相位角确定三相静止坐标系下的参考电压;脉冲控制模块,用于基于pwm发生器根据所述参考电压输出的触发脉冲对储能系统进行控制。9.根据权利要求8所述的系统,其特征在于,所述虚拟调频控制模块,具体用于在虚拟调频控制环节,将所述电网实际频率与预设参考频率进行比较,获取频率偏差绝对值;当所述频率偏差绝对值大于等于预设频率死区宽度阈值时,利用如下公式确定所述附加参考功率,包括:,其中,为附加参考功率;为预设参考频率;f为电网实际频率;为下垂系数。10.根据权利要求9所述的系统,其特征在于,所述虚拟调频控制模块,还用于当所述频率偏差绝对值小于预设频率死区宽度阈值时,确定所述附加参考功率为0。11.根据权利要求8所述的系统,其特征在于,所述虚拟惯量和阻尼控制模块,具体用于按照下述公式获取储能变流器输出的内电势虚拟相位角:,,其中,为储能变流器输出的内电势虚拟相位角;j为虚拟转动惯量;为变流器输出内电势虚拟角速度;为对应于传统同步机的输入机械功率;p为变流器实际输出有功功率;为等效虚拟阻尼系数;为系统额定角速度;为有功参考指令;为附加参考功率;为预设参考频率;f为电网实际频率;为下垂系数;d为虚拟阻尼系数;为隔直环节时间常数;和分别为第一移相环节时间常数和第二移相环节时间常数;为转速偏差放大倍数;s为拉普拉斯算子;t为时间。12.根据权利要求8所述的系统,其特征在于,所述虚拟励磁控制模块,在虚拟励磁控制环节,基于储能变流器的输出端电压和输出端电流获取变流器输出的内电势幅值,包括:其中,为内电势幅值;k为调节器增益;为比例积分选择因子;和分别为第一电压调节器时间常数和第二电压调节器时间常数;为预设励磁调压器参考电压阈值;v为
虚拟励磁调压器实际电压信号;为d轴的电流内环参考值;为滤波器时间常数;u为储能变流器端电压;为变流器输出端电流;为调差电阻,为调差电抗;j表示复数;为励磁绕组时间常数;为暂态电势;为与励磁电压呈线性关系的强制空载电动势;为同步电抗;为d轴暂态电抗;s为拉普拉斯算子。13.根据权利要求8所述的系统,其特征在于,所述电压外环虚拟电路控制模块,在电压外环虚拟电路控制环节,基于所述内电势幅值计算电流内环参考值,包括:,其中,和分别为在d轴和q轴下的电流内环参考值;和分别为风机在d轴和q轴的虚拟内电势,,,为内电势幅值;和分别为风机在d轴和q轴的实测端电压;为支路总阻抗,r和x均为真实阻抗参数,和均为虚拟阻抗参数;j表示复数。14.根据权利要求8所述的系统,其特征在于,所述电流内环控制模块,在电流内环控制环节,基于所述电流内环参考值和内电势虚拟相位角确定三相静止坐标系下的参考电压,包括:在电流内环控制环节,基于所述电流内环参考值确定内电势控制输出信号,包括:,其中,和分别为在d轴和q轴下的内电势控制输出信号;和分别为在d轴和q轴下的变流器端电压;和分别为在d轴和q轴下变流器注入电网的电流实际值;和分别为在d轴和q轴下的电流内环参考值;为变流器输出内电势虚拟角速度;l为输出线路上的电感;和分别构成为在q轴和d轴下的电流状态反馈量;和均为pi控制参数;s为拉普拉斯算子;基于所述内电势虚拟相位角对所述内电势控制输出信号进行派克反变换,以获取三相静止坐标系下的参考电压。15.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,该程序被处理器执行时实现如权利要求1-7中任一项所述方法的步骤。16. 一种电子设备,其特征在于,包括:权利要求15中所述的计算机可读存储介质;以及一个或多个处理器,用于执行所述计算机可读存储介质中的程序。
技术总结
本发明涉及一种基于构网型变流器的储能系统控制方法及系统,包括:在虚拟调频控制环节,基于电网实际频率获取附加参考功率;在虚拟惯量和阻尼控制环节,基于附加参考功率获取储能变流器输出的内电势虚拟相位角;在虚拟励磁控制环节,获取变流器输出的内电势幅值;在电压外环虚拟电路控制环节,基于内电势虚拟相位角和内电势幅值计算电流内环参考值;在电流内环控制环节,基于所述-电流内环参考值和内电势虚拟相位角确定三相静止坐标系下的参考电压;基于PWM发生器输出的触发脉冲对储能系统进行控制。本发明将储能变流器等效成具有同步发电机输出特性的可控电压源,能够更好地发挥储能系统功率吞吐灵活性优势,提升电网对于新能源发电的消纳水平。新能源发电的消纳水平。新能源发电的消纳水平。
技术研发人员:孙华东 李文锋 郭剑波 郭强 孙航宇 赵旭峰 张健 魏巍 艾东平 郑超
受保护的技术使用者:中国电力科学研究院有限公司
技术研发日:2022.07.26
技术公布日:2022/8/26
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。