1.本发明涉及触觉反馈装置领域,特别是涉及一种基于流体驱动的柔性多模态触觉呈现装置及系统。
背景技术:
2.触觉被称为感觉之母,是人类与外界交流的重要通道。人与自然界交互时,触觉时时刻刻都在发挥着不可替代的作用,纹理、冷热、软硬等触觉信息必须通过触摸才能被人体感知,人类更复杂的情感交流也必须通过触摸实现。现有的触觉信息呈现装置多采用单一的触觉信息呈现通道,如纹理、温度、柔软度的单独呈现,无法给用户提供丰富而又逼真的触觉体验,主要体现在以下三个方面:
3.(1)在触觉信息通道的呈现过程中,每种触觉模态的呈现需要相对应的驱动方案,由于多种触觉模态呈现往往需要不同的驱动原理或驱动逻辑,受限于触觉反馈装置的体积大小和动力源的数量限制,现有的大多数触觉信息呈现装置仅能呈现纹理、温度、柔软度中的一种触觉模态,难以在较小体积和一到两种动力源的条件下,实现多种触觉模态的呈现。
4.(2)多种模态之间的信息融合呈现需要各触觉模态之间具备独立呈现触觉信息的能力,由于多种模态间可能存在的相互影响,导致纹理、温度、柔软度三种触觉模态之间难以做到解耦,这对实现多种模态之间的信息融合呈现提出了较高的要求。
5.(3)受限于纹理呈现装置驱动器材料,现有的流体驱动纹理呈现装置多采用刚性或半柔性器件,难以呈现柔性材料的纹理和模仿软体材料的触感,如皮肤、抱枕等柔性材料的纹理。
6.因此,亟需研发一种流体驱动的柔性多模态触觉呈现装置,以满足柔性材质和纹理、温度、柔软度多元触觉信息呈现需求。
技术实现要素:
7.本发明的目的是提供一种基于流体驱动的柔性多模态触觉呈现装置及系统,仅通过流体的驱动实现纹理、温度、柔软度三种触觉模态的解耦控制和呈现。
8.为实现上述目的,本发明提供了如下方案:
9.一种基于流体驱动的柔性多模态触觉呈现装置,所述柔性多模态触觉呈现装置包括从上至下依次设置的柔性薄膜层、纹理呈现层和柔性基底层;
10.柔性薄膜层和纹理呈现层构成密闭的流体温度呈现腔道,流体设置于所述流体温度呈现腔道内;
11.纹理呈现层和柔性基底层构成密闭的流体压力调节通道;
12.通过向流体温度呈现腔道输送不同温度的流体或不同输入量的流体,或调节流体压力调节通道的腔压,实现纹理、温度、柔软度的单独呈现和融合呈现。
13.优选地,所述柔性薄膜层采用柔软的硅橡胶材料。
14.优选地,所述纹理呈现层为柔性材质,并呈现多种不同的三维纹理形貌。
15.优选地,纹理的调节方式包括:控制流体压力调节通道的腔压;
16.温度的调节方式包括:向流体温度呈现腔道中输送定量混合的冷热流体;
17.柔软度的调节方式包括:改变纹理呈现层的刚度。
18.一种基于流体驱动的柔性多模态触觉呈现系统,所述系统包括:液压回路、温度传感器、压力传感器、控制器和前述的柔性多模态触觉呈现装置;
19.温度传感器的信号输出端和压力传感器的信号输出端均与控制器的信号输入端连接;所述温度传感器用于测量所述柔性多模态触觉呈现装置中流体温度呈现腔道内的温度,并将所述温度传输至控制器;所述压力传感器用于测量所述柔性多模态触觉呈现装置中流体温度呈现腔道内的压力,并将所述压力传输至控制器;
20.液压回路的控制端与控制器的信号输出端连接,液压回路的流体端口与所述流体温度呈现腔道连接;所述控制器用于根据所述温度和所述压力控制液压回路向所述流体温度呈现腔道内定量通入冷流体和/或热流体,或从所述流体温度呈现腔道内定量抽取流体,调节流体温度呈现腔道的温度和/或压力。
21.优选地,所述液压回路包括:冷流体输入回路、热流体输入回路和流体输出回路;
22.冷流体输入回路、热流体输入回路和流体输出回路的控制端均与控制器连接,冷流体输入回路、热流体输入回路和流体输出回路的流体端口均与所述流体温度呈现腔道连接。
23.优选地,所述冷流体输入回路和所述热流体输入回路均包括:第一驱动器、第一微型泵、第一电磁阀和第一导向阀;
24.第一微型泵的控制端通过第一驱动器与控制器的信号输出端连接;
25.第一微型泵的输入端用于通入冷流体和/或热流体,第一微型泵的输出端通过第一电磁阀与第一导向阀的输入端连接,第一导向阀的输出端与所述流体温度呈现腔道连接;所述第一微型泵用于在控制器的控制下,并通过第一驱动器的驱动,使冷流体和/或热流体输送至所述流体温度呈现腔道。
26.优选地,所述流体输出回路包括:第二驱动器、第二微型泵、第二电磁阀和第二导向阀;
27.第二微型泵的控制端通过第二驱动器与控制器的信号输出端连接;
28.第二微型泵的输入端通过第二电磁阀与第二导向阀的输出端连接,第二导向阀的输入端与所述流体温度呈现腔道连接;所述第二微型泵用于在控制器的控制下,并通过第一驱动器的驱动,从所述流体温度呈现腔道内抽取流体。
29.根据本发明提供的具体实施例,本发明公开了以下技术效果:
30.本发明公开一种基于流体驱动的柔性多模态触觉呈现装置及系统,柔性多模态触觉呈现装置包括由三层柔性结构和两个流体通道组成,三层柔性结构包括柔性薄膜层、纹理呈现层、柔性基底层,两个流体通道包括流体温度呈现通道和流体压力调节通道,通过向流体温度呈现腔道输送不同温度的流体或不同输入量的流体,或调节流体压力调节通道的腔压,实现纹理、温度、柔软度三种触觉模态的解耦控制和呈现。
附图说明
31.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例中所
需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
32.图1为本发明实施例1提供的基于流体驱动的柔性多模态触觉呈现装置的结构示意图;
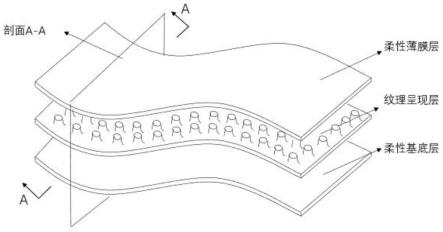
33.图2为图1沿剖面a-a的截面示意图;
34.图3为本发明实施例1提供的纹理呈现层的初始三维纹理形貌示意图;图3(a)为第一种初始三维纹理形貌示意图,图3(b)为第二种初始三维纹理形貌示意图,图3(c)为第三种初始三维纹理形貌示意图;
35.图4为图3中初始三维纹理形貌的高度变化示意图;图4(a)为第一种初始三维纹理形貌的高度变化示意图,图4(b)为第二种初始三维纹理形貌的高度变化示意图,图4(c)为第三种初始三维纹理形貌的高度变化示意图;
36.图5为图3中初始三维纹理形貌的宽度变化示意图;图5(a)为第一种初始三维纹理形貌的宽度变化示意图,图5(b)为第二种初始三维纹理形貌的宽度变化示意图,图5(c)为第三种初始三维纹理形貌的宽度变化示意图;
37.图6为本发明实施例1提供的纹理高度呈现示意图;图6(a)为抽压前的纹理高度呈现示意图,图6(b)为抽压后的纹理高度呈现示意图;
38.图7为本发明实施例1提供的温度模态呈现示意图;图7(a)为冷流体输入后的温度模态呈现示意图,图7(b)为热流体输入后的温度模态呈现示意图;
39.图8为本发明实施例1提供的柔软度模态呈现示意图;图8(a)为调节前的柔软度模态呈现示意图,图8(b)为增大流体压力调节通道腔压后的柔软度模态呈现示意图,图8(c)为施加外部激励后的柔软度模态呈现示意图;
40.图9为本发明实施例2提供的基于流体驱动的柔性多模态触觉呈现系统的结构示意图。
具体实施方式
41.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
42.本发明的目的是提供一种基于流体驱动的柔性多模态触觉呈现装置及系统,仅通过流体的驱动实现纹理、温度、柔软度三种触觉模态的解耦控制和呈现。
43.为使本发明的上述目的、特征和优点能够更加明显易懂,下面结合附图和具体实施方式对本发明作进一步详细的说明。
44.实施例1
45.触觉是人类感知最重要的感官功能之一,它不仅赋予我们与物理世界互动的能力,而且极大地丰富了我们的日常生活,在机器人、可穿戴设备、医疗保健等广泛的应用中发挥着重要作用。在现实世界中,人无时无刻不与外部世界进行交互,其中触觉交互扮演了非常重要的角色,例如:操纵键盘鼠标、握手、抓取物体等,被接触物体的纹理、温度、柔软度
等信息作为外部世界向人体触觉器官的输入,构成了人与外部世界的触觉交互体验,触觉信息呈现装置在盲人与外界交互、虚拟购物感知商品纹理等方面发挥着不可替代的作用。然而,现有的触觉信息呈现装置多采用单一的触觉信息呈现通道,如纹理、温度、柔软度的单独呈现,无法给用户提供丰富而又逼真的触觉体验。为了解决这一难题,本发明实施例提供一种基于流体驱动的柔性多模态触觉呈现装置,如图1所示,包括从上至下依次设置的柔性薄膜层、纹理呈现层和柔性基底层。柔性薄膜层和纹理呈现层构成密闭的流体温度呈现腔道,流体设置于流体温度呈现腔道内。纹理呈现层和柔性基底层构成密闭的流体压力调节通道。通过向流体温度呈现腔道输送不同温度的流体或不同输入量的流体,或调节流体压力调节通道的腔压,实现纹理、温度、柔软度的单独呈现和融合呈现。
46.图2所示,该纹理呈现装置由三层柔性结构和两个流体通道组成,其中三层柔性结构包括:柔性薄膜层、纹理呈现层、柔性基底层,两个流体通道包括:流体温度呈现通道和流体压力调节通道,实现了纹理、温度、柔软度三种触觉模态融合呈现,尤其适用于面向虚拟现实和增强现实应用场景。
47.为了满足呈现柔性材质纹理的需求,柔性薄膜层采用柔软的硅橡胶材料。
48.纹理呈现层为柔性材质,纹理呈现层和纹路基底可通过3d打印或浇铸的工艺进行制备,利用不同柔性材质的3d打印或浇铸材料,可呈现出不同程度的延展性和初始柔软度。通过差异化的纹理呈现层结构设计,实现多种不同的初始三维纹理形貌的呈现。
49.纹理的调节方式包括:控制流体压力调节通道的腔压。参照图3,图3(a)、(b)、(c)为多种不同的初始三维纹理形貌,通过控制流体压力调节通道内的压力,可驱动纹理呈现层的多种形貌变化,例如,图4(a)实现了凸起齿形结构的高度变化,图5(a)实现了凸起齿形结构的宽度变化,由于流体总会沿刚度较小的方向进行膨胀,因此通过改变凸起齿形结构的侧壁和顶端的刚度差异,可实现在同一个液体腔道内,对凸起齿形结构的径向和轴向膨胀进行控制。通过控制腔道压力来调节流体的液面高度,如图6所示,实现纹理的大范围法向尺度调控和呈现。
50.温度的调节方式包括:向流体温度呈现腔道中输送定量混合的冷热流体。冷热液体的定量混合,可以产生介于冷热液之间的任意温度,达到调节流体温度的能力。如图7所示,该方案能够实现触觉装置不同强度的温度呈现,此处实现热传递所使用的流体分为液体和气体,包括但不限于液态水、空气、液态金属等流体介质。
51.柔软度的调节方式包括:改变纹理呈现层的刚度。柔软度单独可调的能力,提出了与温度解耦的不同柔软度呈现装置,可通过改变纹理呈现层的刚度,实现纹理表面的柔软度变化,纹理呈现层的刚度变化实现原理,包括但不限于流体压力变化、磁流变液、介电弹性体等方式。如图8所示,当用户手指按压纹理呈现层时,由于纹理呈现层的刚度变化,导致接触面不同程度的塌陷,改变了用户的触觉体验。图中提供了两种实现方案,方案一如图8(b)所示,通过增大流体压力调节通道腔压,使得装置整体刚度增大,抵抗人手按压的能力增强,方案二如图8(c)所示,结合现有的柔软度变化技术包括光、电、磁等多种原理,纹理呈现层设计为可变刚度材料,通过外部光场、电场、磁场等任意一种外部激励,实现纹理呈现层的刚度变化,图8(c)中展示了可变刚度材料受外部激励刚度增大的情况。
52.本发明的柔性多模态触觉呈现装置具有以下优点:
53.1.本发明中的柔性多模态触觉呈现装置可呈现不同的纹理法向尺度、切向宽度等
多种纹理形貌变化,由柔性薄膜层和纹理呈现层构成密闭的流体温度呈现腔道,通过控制流体的液面高度,实现纹理的大范围法向尺度调控和呈现。
54.此外,基于可编程化的设计思路,通过差异化的纹理呈现层的表面结构设计,实现多种不同的初始纹理三维形貌的呈现,同时选用不同的制备材料和凸起齿形结构刚度分布,通过控制流体压力调节通道内的压力变化,可驱动纹理呈现层的多种形貌变化,用户可以根据自身需求定制化地制备不同的纹理图案。
55.2.本发明中的柔性多模态触觉呈现装置可呈现不同的温度,由柔性薄膜层和纹理呈现层构成密闭的流体温度呈现腔道,通过控制输入流体的温度,实现温度信息的单独呈现以及多元触觉信息的融合反馈。
56.3.本发明中的柔性多模态触觉呈现装置可呈现出不同程度的延展性和柔软度变化。包括柔性薄膜层、纹理呈现层和柔性基底层的柔性流体驱动纹理呈现装置,实现了流体驱动的纹理、温度、柔软度呈现装置的柔性化。所述的纹理呈现层在外部激励信号的刺激下具有可变刚度的能力,使得纹理呈现装置可以用于再现柔性材质纹理和模拟不同的接触表面刚度。
57.实施例2
58.本发明实施例提供一种基于流体驱动的柔性多模态触觉呈现系统,如图9所示,包括:液压回路、温度传感器、压力传感器、控制器和实施例1所述的柔性多模态触觉呈现装置。
59.温度传感器的信号输出端和压力传感器的信号输出端均与控制器的信号输入端连接;温度传感器用于测量所述柔性多模态触觉呈现装置中流体温度呈现腔道内的温度,并将温度传输至控制器;压力传感器用于测量柔性多模态触觉呈现装置中流体温度呈现腔道内的压力,并将压力传输至控制器。液压回路的控制端与控制器的信号输出端连接,液压回路的流体端口与所述流体温度呈现腔道连接;控制器用于根据温度和压力控制液压回路向流体温度呈现腔道内定量通入冷流体和/或热流体,或从流体温度呈现腔道内定量抽取流体,调节流体温度呈现腔道的温度和/或压力。
60.示例性的,液压回路包括:冷流体输入回路、热流体输入回路和流体输出回路。冷流体输入回路、热流体输入回路和流体输出回路的控制端均与控制器连接,冷流体输入回路、热流体输入回路和流体输出回路的流体端口均与所述流体温度呈现腔道连接。
61.冷流体输入回路和所述热流体输入回路均包括:第一驱动器、第一微型泵、第一电磁阀和第一导向阀。第一微型泵的控制端通过第一驱动器与控制器的信号输出端连接。第一微型泵的输入端用于通入冷流体和/或热流体,第一微型泵的输出端通过第一电磁阀与第一导向阀的输入端连接,第一导向阀的输出端与所述流体温度呈现腔道连接;所述第一微型泵用于在控制器的控制下,并通过第一驱动器的驱动,使冷流体和/或热流体输送至所述流体温度呈现腔道。
62.流体输出回路包括:第二驱动器、第二微型泵、第二电磁阀和第二导向阀。第二微型泵的控制端通过第二驱动器与控制器的信号输出端连接。第二微型泵的输入端通过第二电磁阀与第二导向阀的输出端连接,第二导向阀的输入端与所述流体温度呈现腔道连接;所述第二微型泵用于在控制器的控制下,并通过第一驱动器的驱动,从所述流体温度呈现腔道内抽取流体。
63.驱动源采用新型的低延迟微型液泵系统,通过微型液泵系统对流体的精准调节与实时控制,实现流体压力调节通道压力和流体温度呈现通道的可调可控。对应图9,输入源为冷水源和热水源,通道1为流体输出通道,通道2为冷流体输入通道,通道3为热流体输入通道,控制器外接监测流体温度呈现通道的压力传感器和温度传感器。通道1为流出通道,由导向阀确定了流体的运动方向为流出方向,通过电磁阀(开关)、微型泵(抽取液体)、驱动器(泵的驱动单元)、控制器(控制驱动器的开关),实现流体温度呈现通道液体的抽出;通道2和通道3通过控制器-驱动器-微型泵-电磁阀-导向阀实现冷、热液体的输入,其中温度传感器和压力传感器将流体温度呈现通道内的温度和压力数据传给控制器,由控制器发送信号给驱动器来控制流体的输入(2,3通道打开)和输出(1通道打开),以及输入流体的温度(2,3通道的冷热液体输入量),实现流体温度呈现通道的压力和温度控制。控制器和传感器组成流体温度呈现通道的闭环控制,例如,给定流体温度呈现通道的目标温度a和压力b,根据流体温度呈现通道当前的温度和压力进行计算,确定控制器打开通道1,2,3中的哪一个(输入还是输出),(1)若当前压力高于目标压力,且温度高于/低于目标温度,则打开1通道,抽出部分流体,实现降压,之后打开2,3通道,输入冷/热液体;(2)若当前压力低于目标压力,且温度高于/低于目标温度,则打开2,3通道,输入冷/热液体。因此,本发明的液压回路具有同时对温度呈现通道的压力和温度进行调节的能力,可实现在任意液面高度下的温度呈现和动态循环。
64.将外部液压回路连接到柔性薄膜层和纹理呈现层之间的流体温度呈现通道,并将测量流体温度呈现通道压力的传感器集成到液压系统的反馈回路之中,进而通过控制腔道压力来调节流体的液面高度。为了实现纹理和温度两种模态的融合呈现,流体温度呈现通道内流体不应少于总体积的四分之一,以在具备纹理法向尺度调控功能的同时,也具备温度模态呈现的能力。
65.为了实现装置的温度模态呈现以及具备调节温度的能力,基于流体本身的温度属性以及能够携带和传递能量的特点,采取流体传热的温度触觉反馈方式,如图9所示,将温度传感器集成到液压系统的反馈回路之中,流体输送系统可以实现冷热液体的定量混合,可以产生介于冷热液之间的任意温度,达到调节流体温度的能力。
66.本发明技术方案带来的有益效果为:
67.(1)实现基于微型流体驱动的纹理、温度、柔软度三种触觉模态的解耦控制和呈现,满足触觉呈现装置纹理高空间分辨率、温度触觉模态可调、柔软度触觉模态可控的需求。
68.(2)实现基于柔性材质的纹理、温度、柔软度三元融合呈现方法,以满足不同刚度材料的多模态触觉呈现的需求,进一步提高触觉信息呈现的真实性和触觉反馈装置的泛用性。
69.本说明书中各个实施例采用递进的方式描述,每个实施例重点说明的都是与其他实施例的不同之处,各个实施例之间相同相似部分互相参见即可。
70.本文中应用了具体个例对本发明的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本发明的方法及其核心思想;同时,对于本领域的一般技术人员,依据本发明的思想,在具体实施方式及应用范围上均会有改变之处。综上所述,本说明书内容不应理解为对本发明的限制。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。