技术特征:
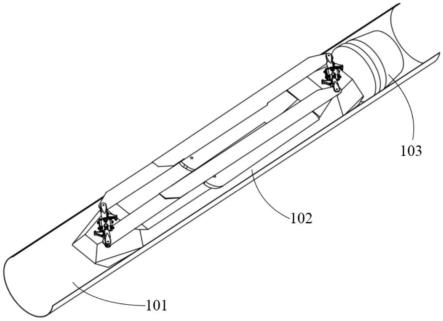
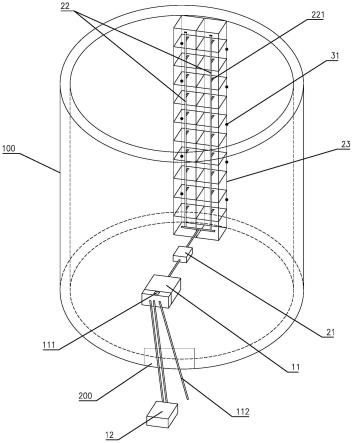
1.一种筒射无人机火箭助推姿态控制组合体,其特征在于,包括发射筒、无人机、火箭助推器、控制器、执行器和传感器,所述火箭助推器安装在所述无人机尾部以形成组合体,所述组合体放置在所述发射筒内;所述火箭助推器包括三个姿态控制发动机和外壳,所述三个姿态控制发动机成等边三角形排列并设置在所述外壳内;所述控制器、所述执行器和所述传感器安装在所述无人机内;所述控制器用于接收平台输入的期望姿态角数据和所述传感器测量的实际姿态角数据,计算出误差量,并将所述误差量发送到执行器中,所述执行器根据所述误差量调节所述姿态控制发动机的推力大小。2.如权利要求1所述的一种筒射无人机火箭助推姿态控制组合体,其特征在于,所述姿态控制发动机为过氧化氢发动机,所述无人机为纵列式旋翼无人机。3.一种筒射无人机火箭助推姿态控制方法,其特征在于,通过调整权利要求1或权利要求2所述姿态控制发动机的推力,以使推力焦点偏移所述无人机重心,实现对所述无人机发射过程中的姿态控制,具体包括:s1:对权利要求1的无人机的实际姿态角信息进行采集;s2:接收期望姿态角信息,根据接收的期望姿态角信息与采集的实际姿态角信息相减计算出误差量,再将误差量输入到所述控制器中,所述控制器根据所述误差量对火箭助推器的总推力进行解耦,并将解耦信息发送到所述执行器中,所述执行器通过六自由度刚体模型进行控制律建模,控制三个所述姿态控制发动机的推力大小,以改变所述火箭助推器的推力,从而产生姿态调整力矩以控制所述无人机的飞行姿态。4.如权利要求3所述的一种如筒射无人机火箭助推姿态控制方法,其特征在于,所述控制器对所述火箭助推器的总推力进行解耦,所述火箭助推器中的三个所述姿态控制发动机分别为第一姿态控制发动机、第二姿态控制发动机和第三姿态控制发动机,三个所述姿态控制发动机的推力公式为:f1=f
basic
k1·
δmf2=f
basic
k2·
δmf3=f
basic
k3·
δm其中,f1为所述第一姿态控制发动机的推力,f2为所述第二姿态控制发动机的推力,f3为所述第三姿态控制发动机的推力,f
basic
为主推力,k1为第一姿态调整系数,k2为第二姿态调整系数,k3为第三姿态调整系数;δm为力矩变化量。5.如权利要求4所述的一种如筒射无人机火箭助推姿态控制方法,其特征在于,5.如权利要求4所述的一种如筒射无人机火箭助推姿态控制方法,其特征在于,5.如权利要求4所述的一种如筒射无人机火箭助推姿态控制方法,其特征在于,其中,η为姿态调整轴线与体轴系的夹角。
6.如权利要求3所述的一种筒射无人机火箭助推姿态控制方法,其特征在于,所述实际姿态角信息包括俯仰角信息和偏航角信息。7.如权利要求5所述的一种筒射无人机火箭助推姿态控制方法,其特征在于,所述姿态调整轴线与体轴系的夹角为60度时,根据所述误差量信息控制三个所述姿态控制发动机的推力大小,以改变所述火箭助推器的推力,从而产生姿态调整力矩以控制所述筒射无人机火箭助推姿态控制组合体的姿态。8.如权利要求3所述的一种筒射无人机火箭助推姿态控制方法,其特征在于,每个所述姿态控制发动机姿态控制推力占总推力的15%-20%。
技术总结
本发明提出了一种筒射无人机火箭助推姿态控制组合体,包括发射筒、无人机、火箭助推器、控制器、执行器和传感器,火箭助推器安装在无人机尾部以形成组合体,组合体放置在发射筒内;本发明采用PID控制器,具有结构体积小,方便携带,制造成本低,控制效率高,使用简单便捷,有效地节省燃料和结构占用空间。本发明还提出了一种筒射无人机火箭助推姿态控制方法,通过改变筒射无人机火箭助推姿态控制组合体中的每个姿态控制发动机的推力,使推力焦点偏移无人机重心,实现对无人机发射过程中的姿态控制,控制效率高,控制精度高,节约更多的成本。本。本。
技术研发人员:吴江 高翼捷 陈恩民 樊小东 符洪洋 王志方 谭天一
受保护的技术使用者:北京航空航天大学
技术研发日:2022.04.02
技术公布日:2022/8/26
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。