1.本实用新型涉及车载机器人领域,尤其涉及一种车载便携式机器人。
背景技术:
2.当前汽车领域使用的车载便携式机器人通常使用的是嵌入式安装结构形式,直接放入座舱内的仪表台凹槽,通过卡扣或者螺钉连接固定,安装后难以拆卸,并且后期维护检修不方便。
3.这种传统的结构形式虽然有安装固定可靠的优点,但是科技感不足,体验效果不佳,不能满足消费者多场景使用的需求。
4.目前新技术使用的是直接摆放式机器人,其设计开发成汽车智能配件,可以随身携带,依靠自身重力和底部橡胶材料的摩擦力放置在仪表台上或者杯托内部,外形小巧灵活,类似于手办玩具。
5.现有技术的缺点:1、由于此类车载便携式机器人外形较小,必然限制了其功能,功能较单一;2、在放置在仪表台上使用时,由于自身重量较轻,以及受到仪表台顶部曲面形状的影响,底部橡胶材料无法吸附,用户刹车减速或者碰撞时机器人容易滑落损坏;3、放置在杯托内,用户急刹时也可能倾覆跌落,用户体验差。
技术实现要素:
6.本实用新型的目的在于克服现有技术存在的以上问题,提供一种车载便携式机器人。
7.为实现上述技术目的,达到上述技术效果,本实用新型通过以下技术方案实现:
8.一种车载便携式机器人,包括底座、滑板、定位卡盘、台阶滑套、机器人本体,所述滑板滑动安装在沿底座径向布置的滑槽中,并且所述滑板与底座之间夹有对滑板施加朝向底座中心方向压力的第一压缩弹簧,所述滑板朝向底座中心的一端与底座中心配合形成定位卡槽,所述定位卡盘卡在定位卡槽中;所述定位卡盘的顶端中心设置有垂直于定位卡盘的空心轴,所述空心轴下部的外侧壁上设有两块关于空心轴的中心轴呈中心对称排布的定位凸块,所述台阶滑套下部的侧壁上设有两个关于台阶滑套的中心轴呈中心对称排布的u型切口,所述台阶滑套套在空心轴上,所述定位凸块卡入u型切口中;所述台阶滑套安装在机器人本体中。
9.其中,所述空心轴顶部螺接有限位螺母,所述限位螺母与台阶滑套的之间夹有套在空心轴上的第二压缩弹簧。
10.其中,所述底座上位于定位卡槽的底部设有向上突出的限位凸块,所述定位卡盘上设有贯穿定位卡盘的限位插孔,所述限位凸块与限位插孔拔插配合。
11.其中,所述滑板朝向底座中心的一端上部设有弧形的第一卡板,所述定位卡槽与第一卡板相对一侧的底座上设有弧形的第二卡板,所述定位卡盘的边缘卡在定位卡槽的槽底与第一卡板、第二卡板之间。
12.其中,所述u型切口包括两个上下平行的定位端口和连通两个定位端口的通道,所述定位凸块为扇形,所述定位凸块能够沿着通道从一个定位端口滑入另一个定位端口中。
13.其中,所述滑板远离定位卡槽的一端设有向上延伸的弧形把手。
14.本实用新型的有益效果是:底座固定安装在汽车座舱内的仪表台上,滑板滑动安装在底座上的滑槽中,利用滑板与底座配合形成定位卡槽对定位底座进行固定,用户只需要用手拉动滑板就可以将机器人本体取下,方便拆装和维护;采用空心轴外侧的定位凸块与台阶滑套侧壁上的u型切口相卡合,用户可手动旋转和按压定位卡盘,将空心轴部分伸出机器人本体外以方便机器人本体工作,或者为便于用户携带将空心轴收缩进机器人本体中。
附图说明
15.此处所说明的附图用来提供对本实用新型的进一步理解,构成本技术的一部分,本实用新型的示意性实施例及其说明用于解释本实用新型,并不构成对本实用新型的不当限定。在附图中:
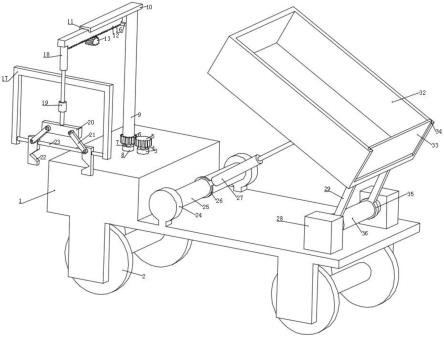
16.图1是本实用新型中定位卡盘卡在定位卡槽中时车载便携式机器人的结构示意图;
17.图2是本实用新型中定位卡盘卡从定位卡槽中拔出时车载便携式机器人的结构示意图;
18.图3是本实用新型中空心轴收缩进机器人本体中时的结构示意图;
19.图4是本实用新型中空心轴部分伸出机器人本体时的结构示意图;
20.图5是本实用新型中空心轴与台阶滑套配合的第一状态的结构示意图;
21.图6是本实用新型中空心轴与台阶滑套配合的第二状态的结构示意图;
22.图7是本实用新型中定位卡盘卡入定位卡槽中的结构示意图;
23.图8是本实用新型中滑板打开状态时滑板与底座的装配结构示意图;
24.图9是本实用新型中滑板与底座装配后的底面结构示意图;
25.图中标号说明:1-底座、2-滑板、3-定位卡盘、4-台阶滑套、5-机器人本体、6-滑槽、7-第一压缩弹簧、8-定位卡槽、9-空心轴、10-定位凸块、11-u型切口、12-限位螺母、13-第二压缩弹簧、14-限位凸块、15-限位插孔、16-第一卡板、17-第二卡板、18-定位端口、19-通道、20-弧形把手。
具体实施方式
26.下面将参考附图并结合实施例,来详细说明本实用新型。
27.如图1至图9所示,一种车载便携式机器人,包括底座1、滑板2、定位卡盘3、台阶滑套4、机器人本体5,底座使用螺丝这类紧固件安装在汽车座舱内的仪表台上,或者用粘胶粘附在汽车座舱内的仪表台上。
28.滑板2滑动安装在沿底座1径向布置的滑槽6中,并且滑板2与底座1之间夹有对滑板2施加朝向底座1中心方向压力的第一压缩弹簧7,滑板2朝向底座1中心的一端与底座1中心配合形成定位卡槽8,定位卡盘3卡在定位卡槽8中;具体的,滑板2朝向底座1中心的一端上部设有弧形的第一卡板16,定位卡槽8与第一卡板16相对一侧的底座1上设有弧形的第二
卡板17,定位卡盘3的边缘卡在定位卡槽8的槽底与第一卡板16、第二卡板17之间。
29.定位卡盘3的顶端中心设置有垂直于定位卡盘3的空心轴9,空心轴9下部的外侧壁上设有两块关于空心轴9的中心轴呈中心对称排布的定位凸块10,台阶滑套4下部的侧壁上设有两个关于台阶滑套4的中心轴呈中心对称排布的u型切口11,台阶滑套4套在空心轴9上,定位凸块10卡入u型切口11中,具体的,u型切口11包括两个上下平行的定位端口18和连通两个定位端口18的通道19,定位凸块10为扇形,定位凸块10能够沿着通道从一个定位端口18滑入另一个定位端口18中。台阶滑套4安装在机器人本体5中。
30.空心轴9顶部螺接有限位螺母12,限位螺母12与台阶滑套4的之间夹有套在空心轴上的第二压缩弹簧13,第二压缩弹簧13压缩安装后能够对台阶滑套4施加预紧力,起到减噪和阻尼作用。
31.底座1上位于定位卡槽8的底部设有向上突出的限位凸块14,定位卡盘3上设有贯穿定位卡盘的限位插孔15,限位凸块14与限位插孔15拔插配合,防止定位卡盘3在定位卡槽8中发生转动。
32.滑板2远离定位卡槽8的一端设有向上延伸的弧形把手20,方便用户滑动滑板2。
33.机器人本体是运用于车载智能座舱场景的一种服务机器人,属于社交机器人、个人交互机器人,主要提供驾驶辅助信息、提升人机交互能力,具有拟人化以及一定程度自主交互能力的实体机器人。
34.定位卡盘与底座组装的结构原理是:此结构主要由定位卡盘、底座、滑板和第一压缩弹簧组成,使用时手动拉动滑板,底座和滑板组成的定位卡槽会打开,形成足够的空间,方便定位卡盘卡入定位卡糟,松开滑板,滑板依靠第一压缩弹簧的回复力恢复到原来位置,滑板和底座组成的定位卡槽可以有效地夹紧并固定住定位卡盘。
35.台阶滑套升降的结构原理是:此结构主要由定位卡盘、台阶滑套、限位螺母、第二压缩弹簧组成,台阶滑套是一种空心阶梯轴,台阶滑套的侧壁上设有u型切口,定位凸块与u型切口相卡合可以固定定位卡盘的位置,通过旋转和按压定位卡盘,使定位凸块能够在u型切口的两个定位端口之间切换位置。
36.以上显示和描述了本实用新型的基本原理、主要特征和本实用新型的优点。本行业的技术人员应该了解,本实用新型不受上述实施例的限制,上述实施例和说明书中描述的只是说明本实用新型的原理,在不脱离本实用新型精神和范围的前提下,本实用新型还会有各种变化和改进,这些变化和改进都落入要求保护的本实用新型范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。