1.本实用新型涉及旋转部件表面变形及压力分布测量技术领域,尤其是涉及一种旋转部件表面变形及压力分布同步测量系统。
背景技术:
2.直升机旋翼、空气和水下螺旋桨、压气机转子和涡轮叶片等旋转机械作为动力推进系统的重要组成部分广泛应用于航空航天领域。这类部件的特点为转速高,其表面压力分布和变形是总体十分关心的参数,但传统的测量方法难于应用到这类运动和旋转体表面和空间场测量中,对于旋转机械复杂流场的多物理参数缺乏直观和有效地测量方法。
3.三维数字散斑相关方法(three-dimensional digital speckle correlation method,3d-dscm)是一种用来测量模型表面振动的光学测量技术。dscm又称为数字图像相关方法(digital image correlation,dic)是一种基于物体表面散斑图像灰度特征分析,从而获得物体运动和变形信息的新型光测量方法。相比于传统光测量技术,具有全场测量、非接触、精度高、光路相对简单、测量视场可调节、对测量环境无特殊要求等优势。但是由于其只使用了单个相机,得到的只是平面物体的二维(面内)位移信息。将双目视觉技术与dscm相结合的3d-dscm较dscm具有能够测量平面或曲面模型表面的三维形貌以及载荷作用下的三维变形等优点。其过程为利用两个相机从不同角度对被测物体表面成像,首先对两个相机进行标定得到相机的内外参数,然后直接利用dscm中的相关匹配算法得到左右两幅图像中对应点的视差。从各点的视差数据和标定参数恢复物体表面的三维形貌,而通过比较形变前后测量区域内各点的三维形貌变化,得到全场的三维位移分布。
4.psp是自20世纪80年代发展的一种基于发光氧猝灭的压力敏感涂料来测定表面压力,它利用一定波长的光照射后,涂料能够发射荧光,测定发射光强度场,可计算出相应的压力分布。与常规的测压孔方法相比,压敏漆测压可以提供整个模型表面的压力分布且不会干扰流场;能够捕捉到复杂流动的详细流动特征;可以提供测压孔无法提供的小尺寸模型和薄翼面表面的压力分布;不需要制造带许多测压孔的模型,可以与许多常规测量实验同时进行。
技术实现要素:
5.本实用新型的目的在于提供一种旋转部件表面变形及压力分布同步测量系统,该系统能够旋转部件的表面变形及压力测量的问题;
6.本实用新型提供一种旋转部件表面变形及压力分布同步测量系统,其包括激光光源模块、图像采集模块、同步控制模块和旋转部件载体;
7.所述激光光源模块为能够输出10ns脉宽的激光光源;
8.所述图像采集模块包括两个跨帧ccd相机,两跨帧ccd相机在设定时间间隔内采集两张图像;
9.所述同步控制模块用于提供激光光光源模块的触发信号和图像采集模块的采集
信号;
10.所述旋转部件载体包括待测量旋转部件,所述待测量旋转部件表面设置有psp涂料,以及布置有散斑标记点。
11.优选的,所述激光光源模块包括激光光源和锥形体光源,所述锥形体光源设置在激光光源的前端。
12.优选的,所述激光光源采用532nm单脉冲激光器,单脉冲脉宽10ns
±
2ns;
13.当辐照面积a大于0.25m2时,需求单脉冲能量≥500mj;
14.若采用532nm双腔脉冲激光器,则不需触发其第二腔脉冲。
15.优选的,所述锥形体光源的光学系统等效焦距f依据需求辐照面积a、光束直径d、拍摄距离l,根据凹面镜等效焦距和扩散角的关系,确定方法如下:
[0016][0017]
优选的,所述跨帧ccd相机上设置有镜头,并在镜头上设置有滤波片。
[0018]
优选的,所述跨帧ccd相机的分辨率大于2048像素
×
2048像素,灰度等级至少为12bit,最小跨帧间距能够调至1μs以下。
[0019]
优选的,当采用532nm激光光源和ptfpp探针分子的psp涂料,选取645nm
±
20nm滤波片;
[0020]
在光强不足时,按需放宽滤波片带宽,但最低通过波长不低于565nm。
[0021]
优选的,所述同步控制模块主要包括红外光电开关和高精度同步器;红外光电开关将通过发射并接收旋转部件的反射光,检测旋转部件的运动相位,同时提供给高精度同步器一个高电平脉冲信号,高精度同步器通过检测高电平脉冲信号上升沿,提供激光光源触发信号和跨帧相机采集信号。
[0022]
优选的,当激光光源和跨帧ccd相机的协同重复工作频率fc较低时,对高精度同步器的输出信号进行,分频处理,分频系数αf≥fx/fc。
[0023]
优选的,散斑等效直径ds和占空比γ将由psp可计算的性能及待测量旋转部件的待拍摄面积ad决定,在ad≤0.144m2的条件下,采用ds≤1mm,γ≤0.05。
[0024]
有益效果:
[0025]
跨帧ccd相机可以在极短时间间隔内快速采集两张图像,激光光源可以输出10ns脉宽的激光光源,psp感光分子的荧光寿命为10~50微秒,通过控制跨帧ccd相机的跨帧时间,在激光脉冲照射后,迅速捕获两帧psp荧光图像,利用荧光寿命法获得表面压力分布,由于两次曝光都在微秒级,可以有效控制旋转部件的运动模糊,使图像清晰可见。
[0026]
由于跨帧ccd相机和激光光源需要严格同步运行,且其重复频率较低,远低于旋转部件转动频率,因此需要引入同步控制模块,在旋转部件到达特定相位后进行拍摄,可以实现高速旋转部件的相位锁定。
[0027]
在待测量旋转表面喷涂带有标记散斑的psp涂层,两台跨帧ccd相机均可获得带有散斑的psp图像,其中散斑位置信息将用于3d-dscm表面变形计算,psp图像将用于表面压力计算,但psp图像将采用腐蚀膨胀方法将散斑区域进行弥合,使压力分布连续完整。
附图说明
[0028]
为了更清楚地说明本实用新型具体实施方式或现有技术中的技术方案,下面将对
具体实施方式或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图是本实用新型的一些实施方式,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
[0029]
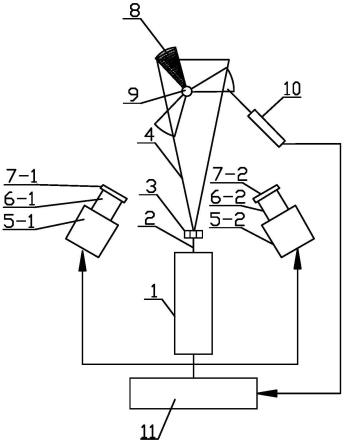
图1为本实用新型具体实施方式提供的旋转部件表面变形及压力分布同步测量系统示意图;
[0030]
图2为本实用新型具体实施方式提供的旋转部件表面变形及压力分布同步测量系统时序图。
[0031]
附图标记说明:
[0032]
其中,1为nd:yag激光光源,2为激光光束,3为锥形体光源,4为锥光束,5-1为左侧跨帧ccd相机,5-2为右侧跨帧ccd相机,6-1为左侧镜头,6-2为右侧镜头,7-1为左侧滤波片,7-2为右侧滤波片,8为待测量旋转部件,9为旋转部件旋转轴,10为红外光电开关,11为高精度同步器;
[0033]
t1为红外光电开关的触发信号,t2为激光光源脉冲信号,δt1为红外光电开关的触发信号发出到激光光源脉冲发出的系统延迟,image1为跨帧ccd相机第一帧图像拍摄的曝光区间,image2为跨帧ccd相机第二帧图像拍摄的曝光区间,δt2为跨帧ccd相机两帧曝光时间间隔,阴影区域及曲线为psp受激辐射的荧光强度随时间变化曲线。
具体实施方式
[0034]
下面将结合实施例对本实用新型的技术方案进行清楚、完整地描述,显然,所描述的实施例是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
[0035]
在本实用新型的描述中,需要理解的是,术语"中心"、"纵向"、"横向"、"长度"、"宽度"、"厚度"、"上"、"下"、"前"、"后"、"左"、"右"、"竖直"、"水平"、"顶"、"底"、"内"、"外"、"顺时针"、"逆时针"等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。
[0036]
此外,术语"第一"、"第二"仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有"第一"、"第二"的特征可以明示或者隐含地包括一个或者更多个所述特征。在本实用新型的描述中,"多个"的含义是两个或两个以上,除非另有明确具体的限定。此外,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本实用新型中的具体含义。
[0037]
如图1所示,本实施方式提供了一种旋转部件表面变形及压力分布同步测量系统,其包括激光光源模块、图像采集模块、同步控制模块和旋转部件载体。
[0038]
激光光源模块为能够输出10ns脉宽的激光光源。
[0039]
图像采集模块包括两个跨帧ccd相机,两跨帧ccd相机在设定时间间隔内采集两张图像。
[0040]
同步控制模块用于提供激光光光源模块的触发信号和图像采集模块的采集信号。
[0041]
旋转部件载体包括待测量旋转部件,所述待测量旋转部件表面设置有psp涂料,以及布置有散斑标记点。
[0042]
跨帧ccd相机可以在极短时间间隔内快速采集两张图像,激光光源可以输出10ns脉宽的激光光源,psp感光分子的荧光寿命为10~50微秒,通过控制跨帧ccd相机的跨帧时间,在激光脉冲照射后,迅速捕获两帧psp荧光图像,利用荧光寿命法获得表面压力分布,由于两次曝光都在微秒级,可以有效控制旋转部件的运动模糊,使图像清晰可见。
[0043]
由于跨帧ccd相机和激光光源需要严格同步运行,且其重复频率较低,远低于旋转部件转动频率,因此需要引入同步控制模块,在旋转部件到达特定相位后进行拍摄,可以实现高速旋转部件的相位锁定。
[0044]
在待测量旋转表面喷涂带有标记散斑的psp涂层,两台跨帧ccd相机均可获得带有散斑的psp图像,其中散斑位置信息将用于3d-dscm表面变形计算,psp图像将用于表面压力计算,但psp图像将采用腐蚀膨胀方法将散斑区域进行弥合,使压力分布连续完整。
[0045]
在本实施方式中,以fd-03风洞光流测速为例,对旋转部件表面变形及压力分布同步测量系统进行进一步的描述。具体的如以下所述:
[0046]
激光光源模块
[0047]
激光光源模块主要由nd:yag激光光源1和锥形体光源3组成,由nd:yag激光光源1发出的激光光束2经过锥形体光源3被调制成为锥光束4。其中,nd:yag激光光源1优选532nm单脉冲nd:yag激光器,单脉冲脉宽10ns
±
2ns,需求辐照面积a大于0.25m2时,需求单脉冲能量≥500mj;若采用532nm双腔脉冲nd:yag激光器,则不需触发其第二腔脉冲;锥形体光源3的光学系统等效焦距f依据需求辐照面积a、光束直径d、拍摄距离l,根据凹面镜等效焦距和扩散角的关系,确定方法如下:
[0048][0049]
图像采集模块
[0050]
图像采集模块主要由两套跨帧ccd相机5-1、5-2、镜头6-1、6-2、滤波片7-1、7-2组成,跨帧ccd相机优选高分辨率、高图像灰度级、低跨帧间距的高品质ccd相机,分辨率建议达到2048像素
×
2048像素以上,灰度等级建议达到12bit,最小跨帧间距建议可调至1μs以下,镜头依据拍摄距离和拍摄面积选取,滤波片依据激光光源照明波长及psp图像辐射波长选取,特别的,选用532nm激光光源和ptfpp探针分子的psp涂料,优选645nm
±
20nm滤波片,在光强不足时,可适当放宽滤波片带宽,但最低通过波长不低于565nm。
[0051]
同步控制模块
[0052]
同步控制模块主要由红外光电开关10和高精度同步器11构成,其中,红外光电开关10将通过发射并接收旋转部件的反射光,检测旋转部件的运动相位,同时提供给高精度同步器11一个高电平脉冲信号,高精度同步器11通过检测高电平脉冲信号上升沿,提供nd:yag激光光源1触发信号和跨帧ccd相机5-15-2采集信号。
[0053]
特别的,nd:yag激光光源1和两跨帧ccd相机5-1、5-2的协同重复工作频率fc较低时,无法完全匹配跟踪旋转部件的旋转频率fx,这时将利用软件,对高精度同步器11的输出信号进行,分频处理,分频系数αf≥fx/fc,这样可保证nd:yag激光光源1和两跨帧ccd相机5-1、5-2可以捕捉到有效的图像数据
[0054]
旋转部件载体
[0055]
旋转部件载体主要由待测量旋转部件8和旋转部件旋转轴9构成,其中待测量旋转部件8表面需先喷涂高灵敏度psp涂料,待涂料成型后,在表面布置散斑标记点。其中散斑位置信息将用于3d-dscm表面变形计算,psp图像将用于表面压力计算,但psp图像将采用腐蚀膨胀方法将散斑区域进行弥合,使压力分布连续完整。
[0056]
散斑等效直径ds和占空比γ将由psp可计算的性能及待测量旋转部件8的待拍摄面积ad决定,一般在ad≤0.144m2的条件下,优选ds≤1mm,γ≤0.05。
[0057]
本实用新型涉及的一种超声速流场光流测速系统工作原理与时序如下。
[0058]
首先,运行待测量旋转部件8,使nd:yag激光光源1、两跨帧ccd相机5-1、5-2、高精度同步器11处于工作状态,安装红外光电开关10并对准待测量旋转部件8运行区域,当待测量旋转部件8运行至特定相位时,红外光电开关10将输出高电平触发信号t1,经过系统延迟δt1后,高精度同步器11输出信号t2触发nd:yag激光光源1、两跨帧ccd相机5-1、5-2工作,其中两跨帧ccd相机5-1、5-2首先拍摄第一帧图像,曝光区间为image1,经过δt2时间间隔,再拍摄第二帧图像,曝光区间为image2。
[0059]
为了保证基于寿命法的psp图像计算效果,通过控制δt2时间间隔,来尽量保证第一帧图像灰度i1和第二帧图像i2灰度比λi满足如下关系:λi=i1/i2≈0.7。
[0060]
综上所述:本实施方式提供的旋转部件表面变形及压力分布同步测量系统能够实现以下目的:
[0061]
(1)建立3d-dscm双目布局和基于荧光寿命法的psp观测布局
[0062]
引入两台跨帧ccd相机和nd:yag激光光源代替传统相机和连续光源,建立3d-dscm双目布局和基于荧光寿命法的psp观测布局。跨帧ccd相机可以在极短时间间隔内(低至200ns间隔)快速采集2张图像,nd:yag激光光源可以输出10ns脉宽的激光光源,psp感光分子的荧光寿命为10~50微秒,通过控制跨帧ccd相机的跨帧时间,可以在nd:yag激光脉冲照射后,迅速捕获两帧psp荧光图像,利用荧光寿命法获得表面压力分布。由于两次曝光都在微秒级,可以有效控制旋转部件的运动模糊,使图像清晰可见。
[0063]
(2)实现高速旋转部件的相位锁定
[0064]
由于跨帧ccd相机和nd:yag激光光源需要严格同步运行,且其重复频率较低,远低于旋转部件转动频率,因此需要引入高精度同步设备和光电触发开关,在旋转部件到达特定相位后进行拍摄。本实用新型采用红外传感光电开关和高精度同步设备,可以实现高速旋转部件的相位锁定。
[0065]
(3)高信噪比表面变形和表面压力图像信息的同步获取
[0066]
在待测量旋转表面喷涂带有标记散斑的psp涂层,并在镜头前加装高通滤波片,以滤除激光光源产生的激光,两台跨帧ccd相机均可获得带有散斑的psp图像,其中散斑位置信息将用于3d-dscm表面变形计算,psp图像将用于表面压力计算,但psp图像将采用腐蚀膨胀方法将散斑区域进行弥合,使压力分布连续完整。
[0067]
最后应说明的是:以上各实施例仅用以说明本实用新型的技术方案,而非对其限制;尽管参照前述各实施例对本实用新型进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本实用新
型各实施例技术方案的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。