1.本发明属于船舶专用系统零位对准的技术领域,尤其涉及一种用于船舶导航系统的姿态角动态对准方法。
背景技术:
2.对准是保证船舶专用系统打击准确度的关键性工作,对准范围囊括瞄准器舷角、仰角,探测器方位、距离、仰角,导航姿态角等诸多影响使用效能的关键设备的关键参数。其中,船舶导航系统担负着向船舶各电子设备提供本平台实时姿态的任务,以保证各电子设备的探测和瞄准精度。所以,导航系统的姿态角零位的准确性至关重要,船舶研制过程中的系泊试验阶段,都需要先期进行导航系统的姿态角零位对准工作。一般在船舶处于坞内半坐墩状态下,采用光学手段完成,主要方法包括陀螺经纬仪法、电子水平仪法等。
3.姿态角对准包含艏向角对准和纵横摇角对准,其主要过程为:在本平台坞内半坐墩状态下,将陀螺经纬仪架设在本平台艏艉线基准上,利用陀螺经纬仪的寻北功能获得船舶艏向角真值,再将陀螺经纬仪置于导航系统的北向基准镜处,利用陀螺经纬仪的自准直功能调整导航系统的机械和电气零位与艏艉线一致,达到艏向角零位对准的目的。将电子水平仪置于主基准平台的纵、横摇方向,利用电子水平仪的角度测量功能获得船舶的纵摇角、横摇角真值,再将电子水平仪置于导航系统的姿态基准平面上,调整导航系统的机械和电气零位,达到纵摇角、横摇角零位对准的目的。
4.上述方法精度高、重复性好且操作简便。但需要船舶处于坞内半坐墩状态,即静止状态,在船舶在航后的用户、保障部门等单位都难以达到坞内半坐墩状态的要求,极大的降低了方法的适用性,导致该方法仅适用于船舶建造阶段的对准工作,却难以在船舶在航期间的保障期进行推广应用。
技术实现要素:
5.本发明所要解决的技术问题在于针对上述存在的问题,提供一种用于船舶导航系统的姿态角动态对准方法,不受坞内半坐墩的限制,且方便快捷,可实现设备的在线零位检测和校准,能够满足目前在航船舶导航系统常态化的零位对准需求。
6.本发明解决上述技术问题所采用的技术方案是:一种用于船舶导航系统的姿态角动态对准方法,其特征在于,包括如下步骤:
7.s1)导航系统姿态角信息的获取:
8.船舶惯性导航系统开机,与时间设备完成对时,输出船舶姿态角信息,船舶记录设备开机,完成对上述信息的录取和记录;
9.s2)艏向角真值的测量:
10.利用架设在本平台艏艉线基准的全球导航卫星系统)设备获得船舶艏向角真值;
11.s3)纵摇角、横摇角真值的测量:
12.布置在主基准平台的测倾传感器获得船舶纵摇角真值和横摇角真值;
13.s4)数据处理与零位修正:
14.在统一时间基准下,通过插值修正和统计分析,得到导航系统姿态角的零位误差,供导航系统的电气零位进行在线修正。
15.按上述方案,步骤s1中所述船舶姿态角信息包括时间信息、艏向角、纵摇角、横摇角信息,记作(t,ψ,θ,γ)。
16.按上述方案,步骤s2中包括如下内容:将全球导航卫星系统设备的基准站布置于船艏艉线基准后标识点上,将移动站布置于船艏艉线基准后标识点上,分别对中、整平,开机稳定后记录卫星观测数据,并解算为带时戳的艏艉线方位角,即船舶艏向角真值,记作(t,ψz)。
17.按上述方案,步骤s3中包括如下内容:测倾传感器开机,完成对时、调零后,采用正交布置,将测倾传感器a置于主基准平台0
°
船艏方向,将测倾传感器b置于主基准平台270
°
左舷方向,利用测倾传感器能够测量平面与当地水准面之间水平角的功能测量并记录带时戳的两个测倾传感器所测得的水平度数据,0
°
船艏方向水平度数据即为纵摇角真值,270
°
左舷方向平度数据即为横摇角真值,记作(t,θz,γz)。
18.按上述方案,步骤s4中包括如下内容:将带有时戳的姿态角真值数据与导航系统姿态角数据汇总,通过线性插值算法,将同一时刻下的真值(t,ψz,θz,γz)与测量值(t,ψ,θ,γ)进行比对,求取姿态角一次差的均值(t,ψs,θs,γs),即为导航系统姿态角的零位误差,并依此对船舶导航系统的姿态角零位进行校正,重复上述过程,直到满足允差要求,其中,(t,ψs,θs,γs)=(t,ψ,θ,γ)-(t,ψz,θz,γz)。
19.本发明的有益效果是:提供一种用于船舶导航系统的姿态角动态对准方法,可在船舶系泊条件下实施,使船舶不受坞内半坐墩条件的限制,具有较强的自主性和可操作性,其测量精度可达到角秒级,能很好的适用于现役船舶常态化对准保障和设备精度诊断,还可推广应用到其它船舶姿态测量设备的零位对准,能够取得较好的经济效益与军事效益。
附图说明
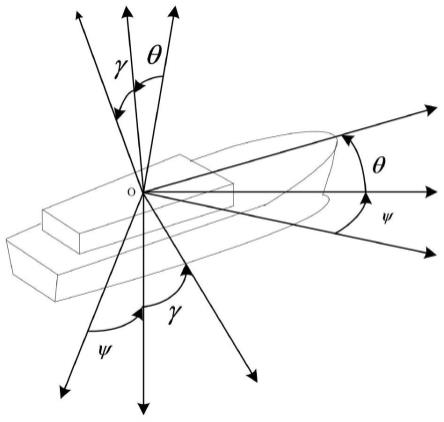
20.图1为本发明一个实施例的船舶姿态角、甲板坐标系、东北天坐标系之间关系示意图。
具体实施方式
21.为使本技术实施例的目的、技术方案和优点更加清楚,下面将结合本技术实施例中的附图,对本技术实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本技术一部分实施例,而不是全部的实施例。通常在此处附图中描述和示出的本技术实施例的组件可以以各种不同的配置来布置和设计。
22.因此,以下对在附图中提供的本技术的实施例的详细描述并非旨在限制要求保护的本技术的范围,而是仅仅表示本技术的选定实施例。基于本技术中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本技术保护的范围。
23.以下结合实施例对本技术的特征和性能作进一步的详细描述。
24.如图1所示,本发明提供一种用于船舶导航系统的姿态角动态对准方法,包括如下
步骤:
25.(1)船舶姿态获取。船舶惯性导航系统开机,与船舶时间设备完成对时,输出本平台姿态信息,包括时间信息、艏向角、纵摇角、横摇角信息,记作(t,ψ,θ,γ)。
26.(2)艏向角真值的测量。将gnss设备的基准站布置于船艏艉线基准后标识点上,将移动站布置于船艏艉线基准后标识点上,分别对中、整平,开机稳定后记录卫星观测数据,并解算为带时戳的艏艉线方位角,即船舶艏向角真值,记作(t,ψz)。
27.(3)纵摇角、横摇角真值的测量。测倾传感器开机,完成对时、调零后,采用正交布置,将测倾传感器a置于主基准平台0
°
船艏方向,将测倾传感器b置于主基准平台270
°
方向左舷,利用测倾传感器能够测量平面与当地水准面之间水平角的功能测量记录带时戳的两个测倾传感器所测得的水平度数据,0
°
船艏方向水平度数据即为纵摇角真值,270
°
方向左舷平度数据即为横摇角角真值,记作(t,θz,γz)。
28.(4)数据处理与零位修正。将带有时戳的真值数据与导航系统姿态角数据汇总,通过线性插值算法,将同一时刻下的真值(t,ψz,θz,γz)与测量值(t,ψ,θ,γ)进行比对,求取姿态角一次差的均值(t,ψs,θs,γs),即为导航系统姿态角的零位误差,并依此对船舶导航系统的姿态角零位进行校正,重复上述过程,直到满足允差要求。其中:
29.(t,ψs,θs,γs)=(t,ψ,θ,γ)-(t,ψz,θz,γz)
30.至此,完成了船舶导航系统的姿态角动态零位对准。
31.以上实施例仅用以说明而非限制本发明的技术方案,尽管参照上述实施例对本发明进行了详细说明,本领域的普通技术人员应该理解:依然可以对本发明进行修改或者等同替换,而不脱离本发明的精神和范围的任何修改或局部替换,其均应涵盖在本发明的权利要求范围当中。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。