1.本发明属于船舶横摇运动预测技术领域,特别涉及一种基于数据融合的混合船舶横摇预测方法。
背景技术:
2.21世纪是人类大规模利用海洋资源、扩大海洋产业和发展海洋经济的新时代。船舶作为海洋运输的主要工具,发挥着非常重要的作用。在海上航行的船舶会连续产生横摇、纵摇、艏摇、横荡、纵荡和垂荡六个自由度的运动。与船舶的其他自由度相比,船舶横摇运动更活跃,更容易对船体和船员构成威胁。重要的是,船舶横摇运动的产生也易受到其内部不稳定性的影响。船舶横摇运动的极端突发性对船舶的稳定性和安全性有着重要的影响。大多数船舶都安装了姿态传感器,以实时监测船舶的横摇运动和其他自由度。除实时监测外,船舶运动的预测也具有重要意义。准确的船舶横摇预测可以为船舶运动控制、海上运输和直升机起降提供合理的建议。
3.近年来,人工智能模型是计算机科学的一个新兴领域。它试图为计算机提供学习能力,可以从数据中学习和提取特征,并扩展到数据驱动的预测方法和算法。大多数学者都致力于在人工智能的基础下,开展船舶运动的高精度预测研究。其中,双向长短期记忆-卷积神经网络不仅具备双向长短期记忆模型捕获时间序列的正向和后向时间特征信息的能力,也具备卷积神经网络提取连续时间序列之间空间特征信息的能力。为了提高数据融合预测模型的精度,避免过拟合问题,可以采用多目标优化算法,在优化预测精度的同时保证模型的鲁棒性。由于外界环境干扰以及数据采集设备的误差,原始数据中不可避免地存在着一些离群点,使得预测模型难以学习时间序列的变化规律。而在船舶运动预测领域中,往往还忽略了原始高采样率船舶运动数据的深层特征信息。利用基于深度学习的特征提取方法,探索和学习原始高分辨率船舶横摇序列的隐含特征信息是提高混合模型性能的有效途径之一。而如果将基于深度学习提取高分辨率数据特征的方法与重采样变换方法得到的数据合理融合,在确定性船舶横摇运动预测中可能获得更好的精度和鲁棒性。通过计算初始预测结果与实际数据之间的残差序列,然后通过分解算法将残差序列分解为多个子序列,再建立统计模型或智能模型进行误差修正。这也是提高船舶横摇预测数值输出精度的方法之一。
技术实现要素:
4.本发明的目的是针对目前船舶横摇运动预测忽略原始高采样率数据的深度特征信息的问题,提供一种基于多目标优化、深度特征提取和多层误差修正的混合数据融合预测模型。
5.为解决上述技术问题,本发明采用如下技术方案:一种基于数据融合的混合船舶横摇预测方法,包括以下步骤:
6.步骤1、获取原始船舶横摇数据,将原始船舶横摇数据通过解码得到分辨率为
100hz的原始高分辨率船舶横摇时间序列数据集;
7.步骤2、采用重采样技术、hampel identifier算法和深度特征提取技术对原始高分辨率船舶横摇时间序列数据集进行预处理,得到低分辨率数据和原始高分辨率数据的深度特征信息数据;
8.步骤3、将步骤2所得低分辨率数据和深度特征信息数据划分为训练集、验证集和测试集;
9.步骤4、分别选用低分辨率数据和深度特征信息数据的训练集建立双向长短期记忆-卷积神经网络bilstm-cnn初始模型;
10.步骤5、将步骤3所得低分辨率数据和深度特征信息数据的验证集分别输入至步骤4所得bilstm-cnn初始模型,分别得到低分辨率数据和深度特征信息数据的初始预测值;采用多目标可行性增强粒子群mofepso算法将两种初始预测值进行融合,获得最优组合权值,完成数据融合预测;
11.步骤6、将步骤5所得数据融合预测结果与实际值相减,得到预测结果的初始残差序列;采用最大重叠离散小波包变换modwpt算法将残差序列分解为多层残差子序列,利用异常值鲁棒极限学习机orelm模型对每层残差子序列分别建立误差修正模型,得到多层误差修正后的残差子序列;再将每层残差子序列进行累加,得到修正后的残差序列,与数据融合预测结果相加,得到预测结果。
12.在上述基于数据融合的混合船舶横摇预测方法中,步骤1所述原始船舶横摇数据包括船舶横摇运动原始高分辨率时间序列x
roll
(t),t∈[1,n
high
];其中,x
roll
(t)表示船舶横摇运动时间序列中t时刻的船舶横摇运动数据,roll表示船舶横摇,n
high
表示采集时刻的数量,high表示高分辨率数据。
[0013]
3.根据权利要求2所述基于数据融合的混合船舶横摇预测方法,其特征在于:步骤2的实现包括:
[0014]
步骤2.1、将原始高分辨率数据x
roll
(t)进行重采样,得到采样率为1hz的低分辨率数据x
rs
(t),t∈[1,n
rs
],rs表示重采样后的低分辨率数据;
[0015]
步骤2.2、使用hampel identifier算法对低分辨率数据中的离群点进行识别和校正,得到校正后的低分辨率数据x
rh
(t),t∈[1,n
rh
],rh表示离群点校正后的低分辨率数据;
[0016]
步骤2.3、将原始高分辨率数据x
roll
(t)采用双层结构的堆叠自动编码器sae模型进行深度特征提取,得到原始高分辨率数据的深度特征信息数据x
sae
(t),t∈[1,n
sae
],sae表示深度特征提取的特征信息数据。
[0017]
在上述基于数据融合的混合船舶横摇预测方法中,hampel identifier算法校正具体步骤如下:
[0018]
step1:设置滑动窗口的长度,计算窗口w内数据点的中值mi,mi表示第i个中值,计算表达式为:
[0019]
mi=median[x
rs
(i-k),x
rs
(i-(k 1)),...,x
rs
(i),...,x
rs
(i (k-1)),x
rs
(i k)]
ꢀꢀ
(1)
[0020][0021]
式中,k表示相邻点的个数;median[
·
]表示求方括号内的中值;x
rs
(i-k)表示低分辨率数据中的第i-k个点;
[0022]
step2:计算窗口内数据点的中位绝对偏差madi,madi表示第i个数据点的中位绝对误差,计算表达式为:
[0023][0024]
step3:计算异常点判决系数si,si表示第i个异常点判决系数,表示式为:
[0025][0026]
step4:将x
rs
(i)按以下决策公式进行替换校正:
[0027][0028]
step5:重复step 2-5直至x
rs
(i)中的所有离群点都被校正:
[0029]
x
rh
(i)=hi[x
rs
(i)]
ꢀꢀꢀ
(6)
[0030]
式中,hi[
·
]表示hi离群点校正处理。
[0031]
在上述基于数据融合的混合船舶横摇预测方法中,基于sae模型进行深度特征提取方法如下:
[0032]
step1:输入高分辨率数据,将其重构为一个形状为100
×
3,000的矩阵;
[0033]
step2:设置sae第一层提取层数为50,将100
×
3,000的高分辨率数据输入第一层sae,训练第一层自编码器;
[0034]
step3:将step 2中得到的自编码器对100
×
3,000的高分辨率数据进行编码,100
×
3,000的矩阵与第一层自编码器50
×
100的权重矩阵相乘,再与50
×
3,000的偏置相加,提取50
×
3,000的特征;
[0035]
step4:设置sae第二层提取层数为1,将step 3得到的50
×
3,000的特征输入第二层sae,训练第二层自编码器;
[0036]
step5:将step 4中得到的自编码器对50
×
3,000的特征进行编码,50
×
3,000的特征与第二层自编码器1
×
50的权重矩阵相乘,再与1
×
3,000的偏置相加,提取1
×
3,000的深度特征;
[0037]
step6:输出step 5得到的1
×
3,000的深度特征信息,记为x
sae
(t)。
[0038]
在上述基于数据融合的混合船舶横摇预测方法中,步骤3的实现包括:
[0039]
步骤3.1、根据校正后的低分辨率数据x
rh
(t)和原始高分辨率数据的深度特征信息数据x
sae
(t),分别按照7:2:1的比例划分为训练集、验证集和测试集;
[0040]
步骤3.2、训练集用于训练离群点校正和双向长短期记忆-卷积神经网络初始模型;分别对x
rh
(t)和x
sae
(t)设置数量为t∈[1,0.7n
rh
]和t∈[1,0.7n
sae
];
[0041]
步骤3.3、验证集用于优化数据融合模型的最优组合权值和建立多层误差修正模型;分别对x
rh
(t)和x
sae
(t)设置数量为t∈[0.7n
rh
1,0.9n
rh
]和t∈[0.7n
sae
1,0.9n
sae
];
[0042]
步骤3.4、测试集用于评估模型的预测性能;分别对x
rh
(t)和x
sae
(t)设置数量为t∈[0.9n
rh
1,n
rh
]和t∈[0.9n
sae
1,n
sae
]。
[0043]
在上述基于数据融合的混合船舶横摇预测方法中,步骤4的实现包括以下步骤:
[0044]
步骤4.1、设置滑动窗长为60,滑动步数为1,对低分辨率数据x
rh
(t)和深层特征信息数据x
sae
(t)的训练集进行加窗处理;
[0045]
步骤4.2、将窗口内的低分辨率数据x
rh
(t)和深层特征信息数据x
sae
(t)输入至bilstm-cnn模型的输入层;
[0046]
步骤4.3、将输入层的数据输入至bilstm前向和后向lstm隐含层,lstm隐含层使用遗忘门和输入门控制输入数据的长期记忆状态,使用输出门控制输入数据的短期记忆状态,实现从前向和后向对输入数据进行时间特征提取,输出提取得到的时间特征;
[0047]
步骤4.4、将步骤4.3得到的时间特征输入至cnn的卷积层,使用cnn卷积核与时间特征进行卷积运算,压缩时间特征,提取时间特征的空间特征,输出提取得到的空间特征;
[0048]
步骤4.5、将步骤4.4得到的空间特征输入至cnn的池化层,使用rule激活函数提取重要的空间特征,输出池化后的空间特征;
[0049]
步骤4.6、将步骤4.5得到的池化后的空间特征输入至cnn的全连接层,并与全连接层的权重相乘,与全连接层的偏置相加,对池化后的空间特征进行重新组合,输出预测结果;
[0050]
步骤4.7、计算预测结果与实际结果的误差,重复步骤4.2-4.6,直到训练完最后一个样本,输出bilstm-cnn初始模型。
[0051]
在上述基于数据融合的混合船舶横摇预测方法中,步骤5的实现包括以下步骤:
[0052]
步骤5.1、将步骤3.3所得验证集数据低分辨率数据x
rh
(t)和深层特征信息数据x
sae
(t)分别输入至步骤4所得的bilstm-cnn初始模型,得到初始预测结果和
[0053]
步骤5.2、设置mofepso算法的参数,包括粒子群大小、最大迭代次数、约束条件、粒子搜索的下界lb和上界ub,lb和ub中的b表示boundary,随机初始化粒子的速度v和位置p;粒子的速度v和位置p初始化公式:
[0054]
v=0.3[-(u
b-lb) rand(0,1)
·
2(u
b-lb)]
ꢀꢀꢀ
(7)
[0055]
p=lb rand(0,1)
·
(u
b-lb)
ꢀꢀꢀ
(8)
[0056]
式中,rand(0,1)表示0~1的随机数值;
[0057]
步骤5.3、用包含偏差bias和方差variance的目标函数计算可行粒子的目标函数;和的融合预测结果定义为的融合预测结果定义为表示低分辨率数据的初始预测集,t∈[0.7n
rh
1,0.9n
rh
];表示深度特征提取数据的初始预测集,t∈[0.7n
sae
1,0.9n
sae
];df表示融合预测;的表达式如下:
[0058][0059]
p=[w
rh
,w
sae
]
ꢀꢀꢀ
(10)
[0060]
s.t.w
rh
w
sae
=1
ꢀꢀꢀ
(11)
[0061]
式中,t∈[0.7n
rh
1,0.9n
rh
];bias和variance的求
导计算如下:
[0062][0063]
其中,e
t
[
·
]表示对时间t的期望;ed[
·
]表示对训练样本d的期望;ed[
·
]采用交叉验证的方法将训练数据划分为多个样本集;e
ε
[
·
]表示对噪声的期望;e
t,d
[
·
]表示对时间和训练样本的期望;d为训练样本;y
df
(t;ζ)表示有噪声的实际数据;ζ为噪音;表示训练样本为d的融合预测结果;e
ε
[y
df
(t;ζ)]表示没有噪声ζ的实际数据y
df
(t;ζ);由于噪声ζ不能完全消除,e
ε
[y
df
(t;ζ)]被y
df
(t;ζ)代替;
[0064]
步骤5.4、更新粒子的速度v和位置p;可行粒子和非可行粒子在t 1时刻的速度和位置更新为:
[0065]
v(t 1)=ξ
·
v(t) cg·
rand(0,1)
·
(p
g-p(t)) c
l
·
rand(0,1)
·
(p
l-p(t))
ꢀꢀ
(13)
[0066]vnon
(t 1)=ξ[ξ
·vnon
(t) cg·
rand(0,1)
·
(p
g-p
non
(t))]
ꢀꢀꢀ
(14)
[0067]
p(t 1)=p(t) v(t 1)
ꢀꢀꢀ
(15)
[0068]
p
non
(t 1)=p
non
(t) v
non
(t 1)
ꢀꢀꢀ
(16)
[0069]
其中,v(t 1)为可行粒子在t 1时刻的速度,v
non
(t 1)为非可行粒子v
non
在t 1时刻的速度,non表示非可行粒子;p(t 1)为可行粒子在t 1时刻的位置,p
non
(t 1)为非可行粒子v
non
在t 1时刻的位置;ξ为惯性因子;cg为全局加速度系数,pg为粒子群的全局最优位置,g表示全局;c
l
为局部加速度系数,p
l
为粒子群的局部最优位置,l表示局部;ξ为决策变量导向系数;
[0070]
步骤5.5、计算极限违规率;极限违规率的计算如下:
[0071][0072][0073]
w=max(w
l
,wu)
ꢀꢀꢀ
(19)
[0074][0075]
式中,w
l
为下限违规率,l表示下;wu为违规上限率,u表示上;n为决策变量个数;表示第n个决策变量的下界;表示第n个决策变量的上界;pn(t 1)表示第n个决策变量在t 1时刻的位置;pn(t)表示第n个决策变量在t时刻的位置;
[0076]
步骤5.6、重复步骤5.3至步骤5.5,直至达到最大迭代次数;得到帕累托前沿集,选择集合作为最终的最优组合权值;
[0077]
[0078][0079][0080]
式中,p
op
为数据融合模型的最优组合权值集,op表示最优;表示的最优权重;表示的最优权重。
[0081]
在上述基于数据融合的混合船舶横摇预测方法中,步骤6的实现包括以下步骤:
[0082]
步骤6.1、输入数据融合预测结果,与实际结果相减,输出预测结果的初始残差序列;
[0083]
步骤6.2、输入步骤6.1得到的预测结果的初始残差序列,使用modwpt算法分解,设置分解等级为2,分解层数为4;modwpt算法通过分割信号频带,对每个频带上的信号建立小波包节点,再对每个小波包节点匹配对应的小波滤波器,提取该小波包节点的小波系数和尺度系数,计算得到子序列,输出4层残差子序列;
[0084]
步骤6.3、输入步骤6.2得到的4层残差子序列,对每层残差子序列建立orelm修正模型;orelm通过引入增广拉格朗日函数,求最优的隐含层权重,使修正后的结果与目标结果之间的误差达到最小,输出4层误差修正后的残差子序列;
[0085]
步骤6.4、输入步骤6.3得到的4层误差修正后的残差子序列,将每层残差子序列进行累加,输出修正后的残差序列;
[0086]
步骤6.5、输入步骤6.4得到的修正后的残差序列,与数据融合预测结果相加,输出预测结果。
[0087]
与现有技术相比,本发明的有益效果:
[0088]
1.采用基于深度学习的bilstm-cnn模型作为基准预测模型,具有较好的空时特征提取和预测能力;
[0089]
2.数据预处理方法对原始数据的离群点进行了有效地识别和修正,得到了满意的结果。此外,对原始高分辨率数据进行深度特征提取,为数据融合预测提供了研究基础,为船舶横摇预测提供了新的导向;提供了更精确的确定性船舶运动预测能力,在船舶预警系统中具有较大的实际应用潜力。
[0090]
3.混合多目标数据融合预测模型的预测结果优于其他数据类型的预测结果,mofepso算法还可以根据不同的数据类型自适应地为基模型分配最优的组合权重,使得预测性能稳定;
[0091]
采用多目标水母搜索算法优化深度信念网络模型的超参数,与现有单目标优化算法相比,具有更快的搜索速度,避免陷入局部最优解;
[0092]
4.结合modwpt算和orelm模型建立的多层误差修正模型降低了初始残差序列的不稳定性,更好地修正残差中的可预测分量。
附图说明
[0093]
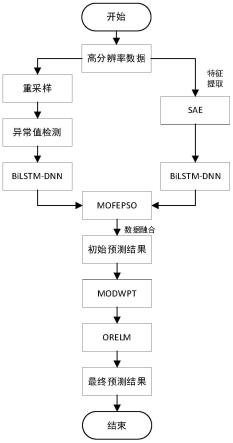
图1是本发明一个实施例数据融合预测模型完整结构流程图;
[0094]
图2是本发明一个实施例hampel identifier(hi)离群点校正方法具体步骤流程图;
[0095]
图3是本发明一个实施例基于堆叠自动编码器的深度特征提取方法具体步骤流程图;
[0096]
图4是本发明一个实施例双向长短期记忆-卷积神经网络预测的具体步骤流程图;
[0097]
图5是本发明一个实施例基于多目标可行性增强粒子群算法数据融合预测的具体步骤流程图;
[0098]
图6是本发明一个实施例多层误差修正方法的具体步骤流程图。
具体实施方式
[0099]
下面将结合本发明实施例对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动的前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0100]
需要说明的是,在不冲突的情况下,本发明中的实施例及实施例中的特征可以相互组合。
[0101]
下面结合具体实施例对本发明作进一步说明,但不作为本发明的限定。
[0102]
本实施例提供一种由离群点校正、深度特征提取、多目标数据融合、多层误差修正等方法和双向长短期记忆-卷积神经网络组成的新型混合数据融合预测模型。
[0103]
一种基于数据融合的混合船舶横摇预测方法,包括如下步骤:
[0104]
1)由船舶上安装的姿态传感器获取原始船舶横摇数据,将原始数据通过解码得到分辨率为100hz的原始高分辨率船舶横摇时间序列数据集;
[0105]
2)采用重采样技术、hampel identifier算法和深度特征提取技术对原始高分辨率数据进行预处理,可降低数据的冗余性、校正离群点和提取原始数据的深度特征信息;一方面,将原始高分辨率数据进行重采样,可得到采样率为1hz的低分辨率数据,再使用hampel identifier算法对低分辨率数据中的离群点进行识别和校正,得到校正后的低分辨率数据;另一方面,将原始高分辨率数据采用双层结构的堆叠自动编码器sae模型进行深度特征提取,得到原始高分辨率数据的深度特征信息数据;
[0106]
3)基于步骤2)数据预处理后得到的低分辨率数据和深度特征信息数据,划分为训练集、验证集和测试集;
[0107]
4)分别选用低分辨率数据和深度特征信息数据的训练集建立双向长短期记忆-卷积神经网络(bilstm-cnn)初始模型。bilstm-cnn模型由bilstm模型和cnn网络组成。bilstm神经网络既可以提取序列的正向特征信息,也可以提取序列的向后特征信息。cnn也是一个基于深度学习的网络,通过对输入数据进行卷积运算和压缩,可以有效提取输入数据的空间特征。
[0108]
5)将步骤3)中对低分辨率数据和深度特征信息数据划分所得的验证集分别输入至步骤4)所得的bilstm-cnn初始模型,可分别得到低分辨率数据和深度特征信息数据的初始预测值。其中,低分辨率数据的预测结果包含了原始高分辨率数据的波动规律信息,而深度特征信息数据的预测结果包含了原始高分辨率数据的深层内在相关信息。采用多目标可行性增强粒子群mofepso算法将两种预测结果进行合理地融合,获得最优组合权值,完成数据融合预测。将mofepso算法的多目标函数设置为偏差(bias)和方差(variance)。偏差表示
测量实际值与预测值之间的误差精度,方差反映预测值与实际值之间的离散程度。
[0109]
6)将步骤5)得到的数据融合预测结果与实际值相减,可得到预测结果的初始残差序列。采用最大重叠离散小波包变换(modwpt)算法对残差序列分解为多层残差子序列,利用异常值鲁棒极限学习机(orelm)模型对每层残差子序列分别建立误差修正模型,可得到多层误差修正后的残差子序列。再将每层残差子序列进行累加,得到修正后的残差序列,与数据融合预测结果相加,得到最终确定性预测结果。
[0110]
7)将步骤3)中对低分辨率数据和深度特征信息数据划分所得的测试集分别输入至步骤6)得到的数据融合混合预测模型,对数据融合混合预测模型的预测精度进行误差分析,验证模型的预测性能和鲁棒性。
[0111]
具体实施时,如图1所示,基于多目标优化、深度特征提取和多层误差修正,提供的船舶横摇的混合数据融合预测模型如下:
[0112]
s1:由船舶上安装的姿态传感器获取原始船舶横摇数据,将原始船舶横摇数据通过解码得到分辨率为100hz的原始高分辨率船舶横摇时间序列数据集;
[0113]
船舶横摇运动原始高分辨率时间序列为x
roll
(t),t∈[1,n
high
]。x
roll
(t)表示船舶横摇运动时间序列中t时刻的船舶横摇运动数据,roll表示船舶横摇。n
high
表示采集时刻的数量,high表示高分辨率数据,实施例中n
high
=300,000。
[0114]
s2.1:采用重采样技术、hampel identifier算法和深度特征提取技术对原始高分辨率数据进行预处理。一方面,为了获取所需预测数据的分辨率,将原始高分辨率数据x
roll
(t)进行重采样,可得到采样率为1hz的低分辨率数据x
rs
(t),t∈[1,n
rs
],rs表示重采样后的低分辨率数据,实施例中n
rs
=3,000。再使用hampel identifier算法对低分辨率数据中的离群点进行识别和校正,得到校正后的低分辨率数据x
rh
(t),t∈[1,n
rh
],rh表示离群点校正后的低分辨率数据,实施例中n
rh
=3,000。另一方面,将原始高分辨率数据x
roll
(t)采用双层结构的堆叠自动编码器sae模型进行深度特征提取,得到原始高分辨率数据的深度特征信息数据x
sae
(t),t∈[1,n
sae
],sae表示深度特征提取的特征信息数据,实施例中n
sae
=3,000。
[0115]
步骤2.1hampel identifier(hi)离群点校正方法
[0116]
时间序列中不遵循历史趋势或一般变化规律的数据点被称为离群点,利用hi离群点校正方法可以对船舶横摇重采样后低分辨率数据x
rs
(t)的离群点进行自适应识别和校正,可得到校正后的低分辨率数据x
rh
(t),使得预测模型更易学习数据的规律。
[0117]
如图2所示,实施例中s2.1的具体步骤如下:
[0118]
step 1:设置滑动窗口的长度。然后计算窗口w内数据点的中值mi,mi表示第i个中值,计算表达式为:
[0119]
mi=median[x
rs
(i-k),x
rs
(i-(k 1)),...,x
rs
(i),...,x
rs
(i (k-1)),x
rs
(i k)]
ꢀꢀ
(1)
[0120][0121]
式中,k表示相邻点的个数;median[
·
]表示求方括号内的中值;x
rs
(i-k)表示低分辨率数据中的第(i-k)个点;
[0122]
step 2:计算窗口内数据点的中位绝对偏差madi,madi表示第i个数据点的中位绝对误差,计算表达式为:
[0123][0124]
step 3:计算异常点判决系数si,si表示第i个异常点判决系数,表示式为:
[0125][0126]
step 4:将x
rs
(i)按以下决策公式进行替换校正:
[0127][0128]
step 5:重复step 2-5直至x
rs
(i)中的所有离群点都被校正:
[0129]
x
rh
(i)=hi[x
rs
(i)]
ꢀꢀꢀ
(6)
[0130]
式中,hi[
·
]表示hi离群点校正处理。
[0131]
s2.2基于sae的深度特征提取方法
[0132]
采用基于sae的深度特征提取方法,从非线性原始高分辨率数据x
roll
(t)中挖掘潜在的深层内在关联信息,减少重采样方法造成的信息缺失。采用原始的高分辨率数据x
roll
(t),将其重构为一个形状为100
×
3,000的矩阵。将100
×
3,000的矩阵输入第一层sae,第一层sae的提取层数设为50,输出50
×
3,000的矩阵;再将50
×
3,000的矩阵输入第二层sae,第二层sae的提取层数设为1,输出1
×
3,000的矩阵,可得到原始高分辨率数据的深度特征信息数据x
sae
(t)。
[0133]
如图3所示,实施例中s2.2的具体步骤如下:
[0134]
step 1:输入高分辨率数据,将其重构为一个形状为100
×
3,000的矩阵。
[0135]
step 2:设置sae第一层提取层数为50,将100
×
3,000的高分辨率数据输入第一层sae,训练第一层自编码器。
[0136]
step 3:将step 2中得到的自编码器对100
×
3,000的高分辨率数据进行编码,100
×
3,000的矩阵与第一层自编码器50
×
100的权重矩阵相乘,再与50
×
3,000的偏置相加,提取50
×
3,000的特征。
[0137]
step 4:设置sae第二层提取层数为1,将step 3得到的50
×
3,000的特征输入第二层sae,训练第二层自编码器。
[0138]
step 5:将step 4中得到的自编码器对50
×
3,000的特征进行编码,50
×
3,000的特征与第二层自编码器1
×
50的权重矩阵相乘,再与1
×
3,000的偏置相加,提取1
×
3,000的特征。
[0139]
step 6:输出step 5得到的1
×
3,000的深度特征信息,记为x
sae
(t)。
[0140]
s3:基于s2数据预处理后得到的低分辨率数据x
rh
(t)和深度特征信息数据x
sae
(t),分别按照7:2:1的比例划分为训练集、验证集和测试集;
[0141]
训练集:离群点校正和初始网络训练所需的数据,实施例中分别对x
rh
(t)和x
sae
(t)设置数量为t∈[1,0.7n
rh
]和t∈[1,0.7n
sae
];
[0142]
验证集:对数据融合预测模型的组合权值优化和建立多层误差修正所需的数据,
实施例中分别对x
rh
(t)和x
sae
(t)设置数量为t∈[0.7n
rh
1,0.9n
rh
]和t∈[0.7n
sae
1,0.9n
sae
];
[0143]
测试集:评估模型系统的预测性能,实施例中分别对x
rh
(t)和x
sae
(t)设置数量为t∈[0.9n
rh
1,n
rh
]和t∈[0.9n
sae
1,n
sae
]。
[0144]
训练集用于训练离群点校正和训练双向长短期记忆-卷积神经网络初始模型;
[0145]
验证集用于优化数据融合模型的最优组合权值,建立多层误差修正模型;
[0146]
测试集用于评估模型的最终预测性能。
[0147]
s4:分别选用低分辨率数据x
rh
(t)和深层特征信息数据x
sae
(t)的训练集分别建立bilstm-cnn初始模型。bilstm-cnn模型的优势既在于bilstm网络可以提取船舶横摇序列的正向和反向时间特征信息,又在于cnn模型可以对船舶横摇横摇序列进行卷积运算和压缩,提取原数据的空间特征信息。将低分辨率数据x
rh
(t)和深层特征信息数据x
sae
(t)的训练集滑窗输入至bilstm-cnn模型的输入层,窗口长度为60,滑动步数为1。bilstm通过前向和后向lstm隐含层对输入层数据进行前向和后向的时间特征提取。cnn对bilstm提取的时间特征进行卷积和池化操作,提取空间特征,并通过全连接层输出bilstm-cnn的预测结果。最后计算预测结果与训练集实际结果的误差,重复训练,得到bilstm-cnn模型。
[0148]
如图4所示,实施例中s4的具体步骤为:
[0149]
s4.1:设置滑动窗长为60,滑动步数为1,对低分辨率数据x
rh
(t)和深层特征信息数据x
sae
(t)的训练集进行加窗处理。
[0150]
s4.2:将窗口内的低分辨率数据x
rh
(t)和深层特征信息数据x
sae
(t)输入至bilstm-cnn模型的输入层。
[0151]
s4.3:将输入层的数据输入至bilstm前向和后向lstm隐含层,lstm隐含层使用遗忘门和输入门控制输入数据的长期记忆状态,使用输出门控制输入数据的短期记忆状态,实现从前向和后向对输入数据进行时间特征提取,输出提取得到的时间特征。
[0152]
s4.4:将s4.3得到的时间特征输入至cnn的卷积层,使用cnn卷积核与时间特征进行卷积运算,压缩时间特征,提取时间特征的空间特征,输出提取得到的空间特征。
[0153]
s4.5:将s4.4得到的空间特征输入至cnn的池化层,使用rule激活函数提取重要的空间特征,减小空间特征的维度大小,降低计算代价,输出池化后的空间特征。
[0154]
s4.6:将s4.5得到的池化后的空间特征输入至cnn的全连接层,并与全连接层的权重相乘,与全连接层的偏置相加,对池化后的空间特征进行重新组合,输出预测结果。
[0155]
s4.7:计算预测结果与实际结果的误差,重复s4.2-4.6,直到训练完最后一个样本,输出bilstm-cnn模型。
[0156]
s5:优化s4所得低分辨率数据的初始预测值和深度特征信息数据的初始预测值的组合权值,包括将s3中对低分辨率数据和深度特征信息数据划分所得的验证集分别输入至s4所得的bilstm-cnn初始模型,使用mofepso算法对数据融合预测模型的组合权值进行寻优,得到优化后的组合权值,将优化后的组合权值输入至数据融合预测模型得到优化后的数据融合预测模型。
[0157]
如图5所示,实施例中s5具体步骤为:
[0158]
s5.1:将s3所得的验证集数据x
rh
(t)和x
sae
(t)分别输入至s4所得的bilstm-cnn初始模型,可得到初始预测结果和
[0159]
s5.2:设置mofepso算法的参数,所述参数包括粒子群大小、最大迭代次数、约束条件、粒子搜索的下界lb和上界ub,所述lb和ub中的b表示英文单词“boundary”。随机初始化粒子的速度v和位置p。粒子的速度v和位置p由下式初始化:
[0160]
v=0.3[-(u
b-lb) rand(0,1)
·
2(u
b-lb)]
ꢀꢀꢀ
(7)
[0161]
p=lb rand(0,1)
·
(u
b-lb)
ꢀꢀꢀ
(8)
[0162]
式中,rand(0,1)表示0~1的随机数值。
[0163]
s5.3:用包含偏差bias和方差variance的目标函数计算可行粒子的目标函数。和的融合预测结果定义为所述表示低分辨率数据的初始预测集,t∈[0.7n
rh
1,0.9n
rh
];所述表示深度特征提取数据的初始预测集,t∈[0.7n
sae
1,0.9n
sae
];所述df表示融合预测。的表达式如下:
[0164][0165]
p=[w
rh
,w
sae
]
ꢀꢀꢀ
(10)
[0166]
s.t.w
rh
w
sae
=1
ꢀꢀꢀ
(11)
[0167]
式中,t∈[0.7n
rh
1,0.9n
rh
]。bias和variance的求导计算如下:
[0168][0169]
其中,e
t
[
·
]表示对时间t的期望;ed[
·
]表示对训练样本d的期望;ed[
·
]采用交叉验证的方法将训练数据划分为多个样本集;e
ε
[
·
]表示对噪声的期望;e
t,d
[
·
]表示对时间和训练样本的期望;d为训练样本;y
df
(t;ζ)表示有噪声的实际数据;ζ为噪音;表示训练样本为d的融合预测结果;e
ε
[y
df
(t;ζ)]表示没有噪声ζ的实际数据y
df
(t;ζ)。由于噪声ζ不能完全消除,e
ε
[y
df
(t;ζ)]被y
df
(t;ζ)代替。
[0170]
s5.4:更新粒子的速度v和位置p。可行粒子和非可行粒子在t 1时刻的速度和位置更新为:
[0171]
v(t 1)=ξ
·
v(t) cg·
rand(0,1)
·
(p
g-p(t)) c
l
·
rand(0,1)
·
(p
l-p(t))
ꢀꢀ
(13)
[0172]vnon
(t 1)=ξ[ξ
·vnon
(t) cg·
rand(0,1)
·
(p
g-p
non
(t))]
ꢀꢀꢀ
(14)
[0173]
p(t 1)=p(t) v(t 1)
ꢀꢀꢀ
(15)
[0174]
p
non
(t 1)=p
non
(t) v
non
(t 1)
ꢀꢀꢀ
(16)
[0175]
其中,v(t 1)为可行粒子在t 1时刻的速度,v
non
(t 1)为非可行粒子v
non
在t 1时刻的速度,non表示非可行粒子;p(t 1)为可行粒子在t 1时刻的位置,p
non
(t 1)为非可行粒子v
non
在t 1时刻的位置;ξ为惯性因子;cg为全局加速度系数,pg为粒子群的全局最优位置,g表
示全局;c
l
为局部加速度系数,p
l
为粒子群的局部最优位置,l表示局部;ξ为决策变量导向系数。
[0176]
s5.5:计算极限违规率,以防止新位置超过可变限制。极限违规率的计算如下:
[0177][0178][0179]
w=max(w
l
,wu)
ꢀꢀꢀ
(19)
[0180][0181]
式中,w
l
为下限违规率,l表示下;wu为违规上限率,u表示上;n为决策变量个数;表示第n个决策变量的下界;表示第n个决策变量的上界;pn(t 1)表示第n个决策变量在t 1时刻的位置;pn(t)表示第n个决策变量在t时刻的位置。
[0182]
s5.6:重复s5.3至s5.5,直至达到最大迭代次数。得到帕累托前沿集,选择合适的集合作为最终的最优组合权值。
[0183][0184][0185][0186]
式中,p
op
为数据融合模型的最优组合权值集,op表示最优;表示的最优权重;表示的最优权重。
[0187]
s6:建立多层误差修正模型,可得到最终确定性预测结果。将步骤5得到的数据融合预测结果与实际值相减,可得到预测结果的初始残差序列。采用最大重叠离散小波包变换(modwpt)算法对残差序列分解为多层残差子序列,利用异常值鲁棒极限学习机(orelm)模型对每层残差子序列分别建立误差修正模型,可得到多层误差修正后的残差子序列。再将每层残差子序列进行累加,得到修正后的残差序列,与数据融合预测结果相加,得到最终确定性预测结果。
[0188]
如图6所示,实施例中s6具体步骤为:
[0189]
s6.1:输入数据融合预测结果,与实际结果相减,输出预测结果的初始残差序列。
[0190]
s6.2:输入s6.1得到的预测结果的初始残差序列,使用modwpt算法分解,设置分解等级为2,分解层数为4。modwpt算法通过分割信号频带,对每个频带上的信号建立小波包节点,再对每个小波包节点匹配对应的小波滤波器,提取该小波包节点的小波系数和尺度系数,并计算得到子序列,输出4层残差子序列。
[0191]
s6.3:输入s6.2得到的4层残差子序列,对每层残差子序列建立orelm修正模型。orelm通过引入增广拉格朗日函数,估计最优的隐含层权重,使修正后的结果与目标结果之间的误差达到最小,输出4层误差修正后的残差子序列。
[0192]
步骤6.4:输入步骤6.3得到的4层误差修正后的残差子序列,将每层残差子序列进行累加,输出修正后的残差序列。
[0193]
步骤6.5:输入步骤6.5得到的修正后的残差序列,与数据融合预测结果相加,输出最终确定性预测结果。
[0194]
s7:评估本发明提出的基于多目标优化、深度特征提取和多层误差修正,提供的船舶横摇的混合数据融合预测模型,包括将步骤3)中对低分辨率数据和深度特征信息数据划分所得的测试集分别输入至步骤6)得到的数据融合混合预测模型进行预测性能和鲁棒性测试,并对最终确定性预测结果的预测精度进行误差分析。
[0195]
实施例的技术效果分析结果如下:
[0196] 平均绝对误差(度)均方根误差(度)平均绝对百分比误差(%)1步预测0.01070.01301.06543步预测0.04110.05123.89695步预测0.04960.06124.96177步预测0.05110.06445.033110步预测0.06240.07916.1986
[0197]
以上仅为本发明较佳的实施例,并非因此限制本发明的实施方式及保护范围,对于本领域技术人员而言,应当能够意识到凡运用本发明说明书内容所作出的等同替换和显而易见的变化所得到的方案,均应当包含在本发明的保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。