1.本发明涉及飞机模拟训练技术领域,尤其涉及一种飞机模拟机复杂状态预防和改出训练方法。
背景技术:
2.复杂状态预防和改出训练(uprt)是针对上述复杂状态所进行的预防观察和改出操作的针对性训练,预防性训练可以时刻让飞行员准备好避免出现复杂状态事件,而改出训练可以让飞行员在复杂状态事件出现时避免造成事故。复杂飞行状态改出训练是飞行员在取得私照、商照和航线执照时的必修科目,是飞行员为获取相应执照必须接受的相应训练和应该掌握的相应技能,为了提高安全裕度,飞行员的整个职业生涯中应不断强化uprt。
3.国民用航空局飞行标准司发布的《航空器驾驶员训练指南-复杂状态预防和改出训练(uprt)》(ac-91-fs-2015-30)中明确指出所有的航空运营人应对运行ccar-25部飞机的飞行员在初始训练、转机型训练、差异训练、升级训练、重获资格训练、复训中进行uprt训练。uprt应该循序渐进地进行,直至达到相应的要求。成功完成uprt的飞行员应当能够具备预防和识别复杂状态所需的知识和技能,并在必要时能够改出复杂状态。
4.且近年来,飞机飞行中进入复杂状态等超出航空器正常运行包线的状况已经成为航空运行不安全事件或坠机事故的重要诱因,中国民用航空局民航规〔2020〕28号咨询通告指出,有必要在飞行训练中增加与飞机复杂状态运行有关的扩展包线训练,以提高飞行员的操纵技能和情景意识等基本功,培养良好的心理承受能力,让安全运行平稳可控。
5.现有的复杂状态预防与改出训练多以训练改出为主,即主要关注于如何从深度的复杂状态中改出,而非关注于如何预防进入复杂状态,或如何防止复杂状态严重化。另外,现有的复杂状态预防与改出训练中,也多存在训练场景单一,复杂场景的触发规律性强,飞行员有准备,无法有效训练飞行员的即时决策能力等问题。
技术实现要素:
6.本发明所要解决的技术问题是提供一种用于飞机模拟机复杂状态预防和改出训练的方法,以复杂状态预防训练为主,在基于场景的训练中,动态设置复杂状态,训练飞行员对复杂状态的观察响应能力,并且提供多种常见复杂状态的快速设置,并设计图形化飞机全姿态设置接口,可帮助教员快速设置任意复杂状态,避免训练场景单一重复。同时设置复杂状态响应随机延迟功能,增加复杂状态的随机性,改善训练的规律性问题,加强了飞行员即时决策能力的训练。
7.本发明是通过以下技术方案予以实现:
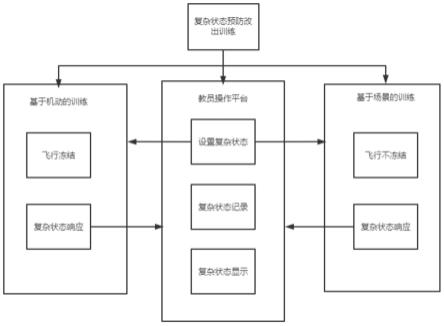
8.一种飞机模拟机复杂状态预防和改出训练方法,其包括基于机动的训练及基于场景的训练两部分,具体包括如下训练流程:
9.——教员操作平台设置复杂状态,并将设置的数据传入模拟机主机;
10.——模拟机主机接收并处理复杂状态请求数据,并判断是基于机动的训练还是基
于场景的训练;
11.——若判断是基于机动的训练则将飞行模拟机冻结,飞行员根据教员随机设置的飞行条件及复杂状态做出响应,进行改出操作;
12.——若判断是基于场景的训练则飞行模拟机不冻结,飞行员根据真实环境出现的复杂状况做出响应进行预防及改出操作;
13.——模拟机主机将飞行员所做出的响应发送给教员操作平台记录。
14.优化的,模拟机主机对基于机动的训练做出的响应过程包括两步,第一步先进行飞行条件响应,然后再进行复杂状态响应。
15.进一步,模拟机主机对基于场景的训练做出的响应过程为,在进行复杂状态响应前加入随机延时程序,到达随机延时设定的时间后进行复杂状态响应。
16.优化的,复杂状态响应包括三个阶段:
17.第一阶段:进行复杂状态分析,获取飞机当前姿态,与设定的姿态进行比较,确定需要设置的姿态幅度和加速度幅度;
18.第二阶段:对姿态及加速度进行设置:
19.对姿态的设置:以当前姿态为起始值,以设定姿态为目标值,通过四阶渐进模型的渐出模型,对姿态幅度进行分割,给出每一时刻需要达到的姿态值,保持姿态变化的连续性,且姿态变化前期快、后期慢;
20.对加速度的设置:加速度的设置分为两个阶段,前期加速度使用四阶渐进模型的渐出模型逐步增加,后期加速度使用四阶渐进模型的渐入模型逐步减小至0;
21.第三阶段:监控飞行员操作输入,若飞行员有操作,证明飞行员已发现复杂状态,正在改出,程序退出复杂状态设置模型,由飞行员操作改出复杂状态,若飞行员无操作,则保持当前的复杂状态,继续训练。
22.进一步,第二阶段中当姿态达到给定姿态或超过预设时间,则退出该阶段,进入第三阶段。
23.进一步,教员操作平台显示飞行模拟机训练包线及飞行数据,并将二者进行比较,查看飞机模拟机复杂状态预防和改出训练是否在飞行模拟机训练包线内完成。
24.进一步,教员操作平台实时显示飞行员所有操作输入,用于评价飞行员改出操作是否正确。
25.优化的,教员操作平台实时显示飞机模拟机运行极限的相关参数,包括飞机模拟机空速、空速极限、载荷因数、载荷因数极限、迎角及失速识别迎角。
26.进一步,当教员在操作平台上激活任一复杂状态后,数据记录功能自动启动,再激活另一复杂状态后,当前复杂状态的数据自动被保存,并以当前时间命名,新激活的复杂状态开始记录数据。
27.进一步,教员操作平台设置图形化的复杂状态设置接口进行全姿态设置。
28.发明的有益效果
29.本发明提供的一种飞机模拟机复杂状态预防和改出训练方法,具有如下优点:
30.1.包含了基于机动的训练方法和基于场景的训练方法,功能全面,通用性强,可应用于多种机型,并以复杂状态预防训练为主,在基于场景的训练中,动态设置复杂状态,训练飞行员对复杂状态的观察和响应能力。
31.2.基于机动的训练通过组合方式,可提供多达90种常见复杂状态的快速设置,充分满足飞行员对不同飞行场景下复杂状态改出操作技巧的训练需求。
32.3.设计了图形化飞机全姿态设置接口,可使教员快速设置任意复杂状态,有效解决训练场景单一、固定、重复的问题。
33.4.基于场景的训练中,设计了响应随机延迟功能,增加复杂状态出现的随机性,改善训练的规律性问题,加强了飞行员即时决策能力的训练。
附图说明
34.图1是复杂状态预防改出训练框图;
35.图2是复杂状态响应模块流程图;
36.图3是基于机动训练的复杂状态设置流程图;
37.图4是基于机动训练的飞行条件设置流程图;
38.图5是基于机动训练的复杂状态响应流程图;
39.图6是基于场景训练的复杂状态快速设置流程图;
40.图7是基于场景训练的复杂状态响应流程图;
41.图8是基于场景训练的全姿态设置界面图;
42.图9是基于场景训练的持续姿态或速度设置流程图;
43.图10是基于场景训练的持续姿态或速度响应流程图;
44.图11是四阶渐进模型的渐入模型图;
45.图12是四阶渐进模型的渐出模型图;
具体实施方式
46.一种飞机模拟机复杂状态预防和改出训练方法,其包括基于机动的训练及基于场景的训练两部分,具体包括如下训练流程:
47.——教员操作平台设置复杂状态,并将设置的数据传入模拟机主机;
48.复杂状态,是指飞行中的一种状况,即飞机无意间超过了沿航线正常飞行或训练期间通常经历的参数值。复杂状态通常指飞机无意中超出下列条件:上仰大于25
°
,或下俯大于10
°
,或坡度角大于45
°
,或参数在上述范围内但空速与飞行状态不相符。
49.复杂状态的设置通过教员操作平台来完成,教员通过在操作平台上选择想要进行复杂状态预防改出训练的场景,如控制法则(用于电传操纵飞机)、飞行高度、飞行速度、飞机复杂状态等,并激活该设置,教员操作平台会将设置的数据统一发送到模拟机主机内的复杂状态响应模块,用于飞机复杂状态的设置。
50.具体实施时,针对基于机动训练的训练特点,本方法设计的复杂状态设置方式,通过广泛收集飞行教员的训练需求,选择其中常用的、有代表性的、对训练飞行员改出技巧最有帮助性的部分复杂状态,将其做成快捷键的形式,方便教员一键设置。本方法设计的快捷复杂状态包括:
51.飞机40
°
抬头,机翼水平;飞机20
°
低头,机翼水平;飞机30
°
抬头,左倾60
°
;飞机30
°
抬头,右倾60
°
;飞机20
°
低头,左倾65
°
;飞机20
°
低头,右倾65
°
;飞机0
°
抬头,左倾115
°
;飞机0
°
抬头,右倾115
°
;飞机20
°
低头,左倾120
°
;飞机20
°
低头,右倾120
°
等。
52.为增加训练场景的多样性以及便捷性,本方法设计了多种常用飞行高度和飞行速度的快速设置,教员可通过这些设置快速将飞机置于想要的高度、速度和姿态,而无需手动飞行或设置,大大节省了训练时间。本方法设计的常用飞行高度包括:10000英尺、20000英尺、35000英尺;本方法设计的常用飞行速度包括:220节、250节、270节;
53.通过这些复杂状态、飞行高度和飞行速度快捷设置的排列组合,可提供90多种不同的训练场景,充分满足飞行员对不同飞行场景下复杂状态改出操作技巧的训练。
54.——模拟机主机接收并处理复杂状态请求数据,并判断是基于机动的训练还是基于场景的训练;
55.——若判断是基于机动的训练则将飞行模拟机冻结,飞行员根据教员随机设置的飞行条件及复杂状态做出响应,进行改出操作;
56.——若判断是基于场景的训练则飞行模拟机不冻结,飞行员根据真实环境出现的复杂状况做出响应进行预防及改出操作;
57.模拟机主机接收并处理复杂状态请求数据,是通过复杂状态响应模块来完成的,复杂状态响应模块是一个位于模拟机主机内的软件仿真单元,用于响应教员操作平台发送的复杂状态请求,同时向教员操作平台输出响应状态。
58.基于机动的训练,是指关注于某一单一事件或机动飞行的训练。这种训练重点在于任务技巧。基于机动的训练包括预防和改出训练,重点强调培养按照要求改出复杂状态所需要的操作技能。基于机动动作训练中只需有限度的强调决策能力。基于机动的训练的复杂状态响应模块主要分为两部分,第一部分是飞行条件响应,第二部分是复杂状态响应。
59.飞行条件响应部分在接收到教员操作平台发送来的请求后,先对请求数据进行解析,确定是基于机动的训练请求后,对飞机进行飞行冻结,然后对复杂状态模型进行复位初始化,然后依次对飞行高度和飞行速度进行超控设置,将飞机放到给定的高度和速度后,再进行复杂状态的响应。
60.基于场景的训练,是指通过仿真训练把某种机动飞行融入到真实飞行环境,以培养在某种运行环境下的飞行技能。基于场景训练的目标是培养学员具备复杂状态预防、识别和改出所需的洞察力和决策技能,同时在逼真的场景训练中将基于机动的技能加以应用。在初始、转机型、升级训练以及复训中,基于场景训练通常在基于机动的训练之后。
61.基于场景的训练与基于机动的训练不同,在教员操作平台上设置复杂状态时,不需要设置飞机的飞行高度和速度,只需设置想要的复杂姿态即可,模型会在当前飞行状态下,将飞机置于设定的复杂状态,且全程不会进行飞行冻结。基于场景的训练比基于机动的训练更加真实,它是模拟真实飞行环境中随时可能出现的复杂状况,在飞行员无准备、无提示状态下,突然施加复杂状态,以训练飞行员的洞察能力、决策能力和操作能力。
62.——模拟机主机将飞行员所做出的响应发送给教员操作平台记录,方便教员对飞行员做出的响应进行查看及考核。
63.优化的,模拟机主机对基于机动的训练做出的响应过程包括两步,第一步先进行飞行条件响应,然后再进行复杂状态响应。
64.进一步,模拟机主机对基于场景的训练做出的响应过程为,在进行复杂状态响应前加入随机延时程序,到达随机延时设定的时间后进行复杂状态响应。模拟机主机在基于场景的训练中加入随机延时模块,该模块会随机延时2-10秒,到达随机延时时间之后再设
置复杂状态。可以增加复杂状态出现的随机性,改善训练的规律性问题,加强了飞行员即时决策能力的训练。
65.优化的,复杂状态响应包括三个阶段:
66.第一阶段:进行复杂状态分析,获取飞机当前姿态,与设定的姿态进行比较,确定需要设置的姿态幅度和加速度幅度;
67.第二阶段:对姿态及加速度进行设置:
68.对姿态的设置:以当前姿态为起始值,以设定姿态为目标值,通过四阶渐进模型的渐出模型,对姿态幅度进行分割,给出每一时刻需要达到的姿态值,保持姿态变化的连续性,且姿态变化前期快、后期慢,保持了进入复杂状态的突然性,用于提高飞行员的洞察能力。
69.对加速度的设置:加速度的设置分为两个阶段,前期加速度使用四阶渐进模型的渐出模型逐步增加,后期加速度使用四阶渐进模型的渐入模型逐步减小至0;加速度的设置主要作用于模拟机的运动系统,用于提供飞机姿态变化时的真实体感。
70.本阶段中使用的四阶渐进模型的渐入模型如式(1)所示
[0071][0072]
四阶渐进模型的渐出模型如式(2)所示:
[0073][0074]
式(1)、(2)中t代表时间间隔;b代表起始值;c代表值的变化量,即目标值减去初始值;d代表周期长度,即在多长时间内完成该变化。第三阶段:监控飞行员操作输入,若飞行员有操作,证明飞行员已发现复杂状态,正在改出,程序退出复杂状态设置模型,由飞行员操作改出复杂状态,若飞行员无操作,则保持当前的复杂状态,继续训练。模拟机主机会将飞行员的操作发送至教员操作平台,教员可以在教员操作平台的显示屏上观察到飞行员的操作,方便对飞行员的操作进行考评。
[0075]
进一步,第二阶段中当姿态达到给定姿态或超过预设时间,则退出该阶段,进入第三阶段。本阶段的退出条件为姿态达到给定姿态(俯仰和滚转都达到)或超过预设时间,前者为达到目标的正常退出,后者为防止程序卡死的保护性退出。
[0076]
进一步,教员操作平台显示飞行模拟机训练包线及飞行模拟机飞行数据,并将二者进行比较,查看飞机模拟机复杂状态预防和改出训练是否在飞行模拟机训练包线内完成。
[0077]
教员操作平台会显示飞行模拟机的训练包线,用于指示本次飞行员的改出操作是否在合理包线内完成。飞行模拟机的训练包线来源于飞行模拟机的验证包线,验证包线可以分为三个区域:
[0078]
i.试飞数据验证区域
[0079]
试飞数据验证区域的飞行包线已被试飞数据所验证,在此区域内,飞行模拟机的性能和动态响应与飞机相似,具有高可信度。
[0080]
ii.风洞和或分析数据区域
[0081]
此区域的飞行包线未与试飞数据进行对比,而是通过风洞测试或使用其它可靠的预测方法(一般由航空器制造商提供)来定义空气动力模型。在此区域内,飞行模拟机的性能和动态响应与飞机相似,具有中可信度。
[0082]
iii.外推区域
[0083]
这是在试飞验证和风洞或分析数据区域以外的推算区域。外推可以是对可靠数据的线性推算,同时保留开始推算之前的最后数值,或是其它一些集值。在此区域内,飞行模拟机的性能和动态响应与飞机相似,具有低可信度。
[0084]
飞行模拟机飞行数据的显示包括:
[0085]
i.教员操作平台会实时显示α(迎角)或β(侧滑角)的包线交叉绘图,用于显示当前是否处于合理包线内。
[0086]
ii.飞行操纵数据的显示
[0087]
教员操作平台会实时显示飞行员的所有操作输入,包括驾操纵杆、发动机推力杆、襟翼、起落架等,用于教员评估飞行员改出操作是否正确。
[0088]
iii.飞机运行极限的显示
[0089]
教员操作平台会实时显示飞机运行极限的相关参数,包括飞机空速和空速极限、载荷因数和载荷因数极限、迎角和失速识别迎角等。
[0090]
有效的uprt训练应当在飞行模拟机验证包线的高可信度和中可信度区域,即训练包线内完成。在教员操作平台上以不同不同图层显示飞行模拟机训练包线及飞行模拟机飞行数据,可以方便将二者进行比较,查看飞机模拟机复杂状态预防和改出训练是否在飞行模拟机训练包线内完成,便于教员对飞行员所作出的操作进行考评。
[0091]
进一步,教员操作平台实时显示飞行员所有操作输入,用于评价飞行员改出操作是否正确。
[0092]
优化的,教员操作平台实时显示飞机模拟机运行极限的相关参数,包括飞机模拟机空速、空速极限、载荷因数、载荷因数极限、迎角及失速识别迎角。
[0093]
进一步,当教员在操作平台上激活任一复杂状态后,数据记录功能自动启动,再激活另一复杂状态后,当前复杂状态的数据自动被保存,并以当前时间命名,新激活的复杂状态开始记录数据。若未激活其他复杂状态,当前复杂状态的最长记录时间可设为5分钟。记录的复杂状态数据会显示在教员操作平台复杂状态页面的记录数据列表中,并按时间顺序排列。教员可在该列表中对记录数据进行播放、暂停、停止以及删除等操作。
[0094]
进一步,教员操作平台设置图形化的复杂状态设置接口进行全姿态设置。全姿态设置训练提供快速设置训练常用复杂状态选项外的其他姿态的设置与训练,全姿态设置训练设计了一种图形化的复杂状态设置接口,通过在俯仰角和滚转角组成的二维坐标系中点选位置,由位置生成对应的姿态角度,完成任意复杂状态的设置。
[0095]
全姿态设置界面以滚转角为横坐标(范围:-120
°
到120
°
),以俯仰角为纵坐标(范围:-90
°
到90
°
),选取合适的范围,制作成滚转-俯仰图,教员可点击坐标系内任意位置,系统根据选择的位置推算出该位置对应的滚转角和俯仰角值,并显示在坐标系旁用于参照,选择完位置(姿态)后,通过点击激活按钮,将选择的复杂状态目标值发送到复杂状态响应模块,完成全姿态复杂状态的设置,同时,全姿态设置界面还提供了一个手动输入按钮,点击该按钮后,会弹出一个对话框,让用户依次输入想要设置的俯仰角和滚转角,并提供激活
按钮,用于将数据发送。图形输入与手动输入互相补充,为用户提供了全面、灵活的复杂状态设置方式,为不同的复杂状态训练提供了保障和方便,可使教员快速设置任意复杂状态,有效解决训练场景单一、固定、重复的问题。
[0096]
综上所述,本发明提供的一种飞机模拟机复杂状态预防和改出训练方法,以复杂状态预防训练为主,在基于场景的训练中,动态设置复杂状态,训练飞行员对复杂状态的观察响应能力,并且提供多种常见复杂状态的快速设置,并设计图形化飞机全姿态设置接口,可帮助教员快速设置任意复杂状态,避免训练场景单一重复。同时设置复杂状态响应随机延迟功能,增加复杂状态的随机性,改善训练的规律性问题,加强了飞行员即时决策能力的训练。
[0097]
以上所述仅为本发明的优选实施例而已,并不用于限制本发明,对于本领域的技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。