技术特征:
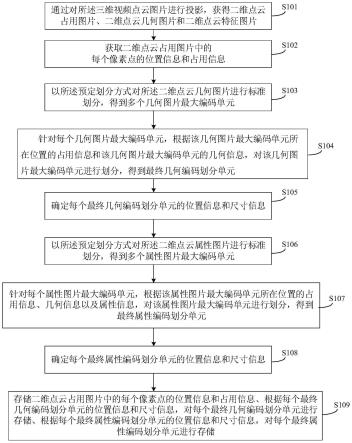
1.一种三维视频点云图片的处理方法,其特征在于,所述方法包括:通过对所述三维视频点云图片进行投影,获得二维点云占用图片、二维点云几何图片和二维点云属性图片;获取二维点云占用图片中的每个像素点的位置信息和占用信息;以所述预定划分方式对所述二维点云几何图片进行标准划分,得到多个几何图片最大编码单元;针对每个几何图片最大编码单元,根据该几何图片最大编码单元所在位置的占用信息和该几何图片最大编码单元的几何信息,对该几何图片最大编码单元进行划分,得到最终几何编码划分单元;确定每个最终几何编码划分单元的位置信息和尺寸信息;以所述预定划分方式对所述二维点云属性图片进行标准划分,得到多个属性图片最大编码单元;针对每个属性图片最大编码单元,根据该属性图片最大编码单元所在位置的占用信息、几何信息以及属性信息,对该属性图片最大编码单元进行划分,得到最终属性编码划分单元;确定每个最终属性编码划分单元的位置信息和尺寸信息;存储二维点云占用图片中的每个像素点的位置信息和占用信息、根据每个最终几何编码划分单元的位置信息和尺寸信息,对每个最终几何编码划分单元进行存储、根据每个最终属性编码划分单元的位置信息和尺寸信息,对每个最终属性编码划分单元进行存储。2.根据权利要求1所述的方法,其特征在于,所述二维点云占用图片包括多个像素点,所述确定每个像素点的位置信息和占用信息的步骤之后,所述方法还包括:确定每个像素点的占用标识,所述标识用于指示该像素点是否被占用。3.根据权利要求2所述的方法,其特征在于,每个几何图片最大编码单元包括多个子编码单元,通过以下方式对每个几何图片最大编码单元进行划分:判断与该几何图片最大编码单元的位置相对应的每个像素点的占用标识是否均为未占用标识;若是,则将该几何图片最大编码单元确定为最终几何编码划分单元;若否,则对该几何图片最大编码单元进行划分。4.根据权利要求3所述的方法,其特征在于,所述几何图片最大编码单元中的每个像素点中包括该像素点的几何信息,其中,判断与该几何图片最大编码单元的位置相对应的每个像素点的占用标识是否均为未占用标识的步骤之后,所述方法还通过以下方式对每个几何图片最大编码单元进行划分包括:根据该几何图片最大编码单元中的每个像素点的几何信息以及该几何图片最大编码单元中的每个像素点的占用标识,确定该几何图片最大编码单元的类型;若该几何图片最大编码单元为不确定类型,则利用标准划分算法,根据该几何图片最大编码单元中的每个像素点的几何信息,得到最终几何编码划分单元;若该几何图片最大编码单元为划分类型,则执行至少一次几何编码单元划分步骤,得到最终几何编码划分单元。
5.根据权利要求4所述的方法,其特征在于,通过以下方式对每个划分类型的几何图片最大编码单元执行几何编码单元划分步骤:将该几何图片最大编码单元,确定为待划分几何编码单元;对待划分几何编码单元进行划分,得到多个划分后的几何编码单元;针对每个划分后的几何编码单元,根据该划分后的几何编码单元中的每个像素点的几何信息以及该划分后的几何编码单元中的每个像素点的占用标识,判断是否对该划分后的几何编码单元进行划分;若否,则将该划分后的几何编码单元,确定为最终几何编码划分单元;若是,则对该划分后的几何编码单元执行编码单元尺寸判断步骤,以得到至少一个最终几何编码划分单元。6.根据权利要求5所述的方法,其特征在于,通过以下方式对每个划分后的几何编码单元执行编码单元尺寸判断步骤:判断该划分后的几何编码单元的尺寸是否为预先设定的最小编码单元的尺寸;若是,则将该划分后的几何编码单元,确定为最终几何编码划分单元;若否,则将该划分后的几何编码单元,确定为待划分几何编码单元,执行至少一次几何编码划分步骤,直至每个划分后的几何编码单元的尺寸为预先设定的最小编码单元的尺寸时,终止执行几何编码划分步骤,并将每个尺寸为预先设定的最小编码单元尺寸的划分后的几何编码单元确定为最终几何编码划分单元。7.根据权利要求2所述的方法,其特征在于,每个属性图片最大编码单元包括多个子编码单元,通过以下方式对每个属性图片最大编码单元进行划分:判断与该属性图片最大编码单元的位置相对应的每个像素点的标识是否均为未占用标识;若是,则将该属性图片最大编码单元确定为最终属性编码划分单元;若否,则对该属性图片最大编码单元进行划分。8.根据权利要求7所述的方法,其特征在于,所述属性图片最大编码单元中的每个像素点中包括该像素点的属性信息,其中,判断与该属性图片最大编码单元的位置相对应的每个像素点的占用标识是否均为未占用标识的步骤之后,所述方法还通过以下方式对每个属性图片最大编码单元进行划分:根据该属性图片最大编码单元的位置所对应的几何图片最大编码单元的中的每个像素点的几何信息、该属性图片最大编码单元中的每个像素点的属性信息、以及该属性图片最大编码单元中的每个像素点的占用标识,确定该属性图片最大编码单元的类型;若该属性图片最大编码单元为不确定类型,则利用标准划分算法,根据该属性图片最大编码单元中的每个像素点的属性信息,得到最终属性编码划分单元;若该属性图片最大编码单元为划分类型,则执行至少一次属性编码单元划分步骤,得到最终编码划分单元。9.根据权利要求8所述的方法,其特征在于,通过以下方式对每个划分类型的属性图片最大编码单元执行属性编码单元划分步骤:将该属性图片最大编码单元,确定为待划分属性编码单元;
对待划分属性编码单元进行划分,得到多个划分后的属性编码单元;针对每个划分后的属性编码单元,根据该划分后的属性编码单元的位置所对应的几何图片最大编码单元的中的每个像素点的几何信息、该划分后的属性编码单元中的每个像素点的属性信息、以及该划分后的属性编码单元的每个像素点的占用标识,判断是否对该划分后的属性编码单元进行划分;若否,则将该划分后的属性编码单元,确定为最终属性编码划分单元;若是,则对该划分后的属性编码单元执行编码单元尺寸判断步骤,以得到至少一个最终属性编码划分单元。10.根据权利要求9所述的方法,其特征在于,通过以下方式对每个划分后的属性编码单元执行编码单元尺寸判断步骤:判断该划分后的属性编码单元的尺寸是否为预先设定的最小编码单元的尺寸;若是,则将该划分后的属性编码单元,确定为最终属性编码划分单元;若否,则将该划分后的属性编码单元,确定为待划分属性编码单元,执行至少一次属性编码划分步骤,直至每个划分后的属性编码单元的尺寸为预先设定的最小编码单元的尺寸时,终止执行属性编码划分步骤,并将每个尺寸为预先设定的最小编码单元尺寸的划分后的属性编码单元确定为最终属性编码划分单元。
技术总结
本申请提供了一种三维视频点云图片的处理方法,其中,该方法包括:获取二维点云占用图片中的每个像素点的位置信息和占用信息;根据该几何图片最大编码单元所在位置的占用信息和该几何图片最大编码单元的几何信息,对该几何图片最大编码单元进行划分,得到最终几何编码划分单元;确定每个最终几何编码划分单元的位置信息和尺寸信息;根据该属性图片最大编码单元所在位置的占用信息、几何信息以及属性信息,对该属性图片最大编码单元进行划分;确定每个最终属性编码划分单元的位置信息和尺寸信息。达到快速对三维视频点云的投影图片进行划分处理的效果。划分处理的效果。划分处理的效果。
技术研发人员:高伟 袁航 陈家宁 李革
受保护的技术使用者:北京大学深圳研究生院
技术研发日:2022.06.07
技术公布日:2022/8/19
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。