1.本实用新型涉及测量设备技术领域,尤其涉及一种高度测量装置。
背景技术:
2.现有的测试设备测量精度高价格高,速度慢,只能用于实验室或用来做小批量的方案验证。在批量生产时,如果使用目前的测试设备,由于速度的原因,要增加设备数量,这样会导致设备总价非常高,工厂负担不起。特别对于一些精细产品,需要对高度进行管控,高度测量是必备的全检步骤,所以如何对产品进行快速的、准确的高度测量,而且还要设备数量较少、成本低、成为了生产中的瓶颈。
技术实现要素:
3.针对上述技术问题,本实用新型公开了一种高度测量装置,提高了生产效率,降低了成本。
4.对此,本实用新型的技术方案为:
5.一种高度测量装置,其包括机架,所述机架上设有输送机构、夹爪机构、飞尘遮挡组件和高度测量模块,所述高度测量模块包括用于高度测量的激光检测头和测量平台,所述激光测试头位于测量平台的上方;
6.所述夹爪机构位于输送机构、高度测量模块之间,所述夹爪机构包括用于将产品从输送机构抓取放到测量平台的第一夹爪模块和用于将测量平台上的产品抓取放到输送机构的第二夹爪模块;
7.所述飞尘遮挡组件包括移动驱动机构和遮挡板,所述遮挡板位于产品的上方,所述第一夹爪模块或第二夹爪模块抓取产品移动时,所述移动驱动机构驱动遮挡板同方向移动。
8.初始状态,所述第一夹爪模块位于输送机构的一侧或上方,所述第二夹爪模块位于测试模块的一侧或上方。
9.采用此技术方案,产品被放在输送机构上,第一夹爪模块抓取输送机构上的产品,放到测量平台,高度测量模块对产品进行高度测量后,第二夹爪模块将测量平台上的产品抓取放到输送机构。
10.作为本实用新型的进一步改进,所述第一夹爪模块位于第二夹爪模块的下方。
11.作为本实用新型的进一步改进,所述夹爪机构包括夹爪支架,所述第一夹爪模块和第二夹爪模块与夹爪支架连接,所述第一夹爪模块和第二夹爪模块均包括y轴移动机构、z轴移动机构、夹爪组件,所述y轴移动机构通过z轴移动机构与夹爪组件连接。
12.作为本实用新型的进一步改进,所述夹爪组件包括夹爪安装架、夹爪气缸和夹爪,所述夹爪安装架与z轴移动机构连接,所述夹爪气缸固定在夹爪安装架上,与夹爪连接。
13.作为本实用新型的进一步改进,所述飞尘遮挡组件包括支撑板和移动驱动机构,所述移动驱动机构与支撑板连接,所述支撑板上设有滑轨,所述遮挡板通过滑动构件与滑
轨连接,所述移动驱动机构与滑动构件连接。
14.作为本实用新型的进一步改进,所述移动驱动机构包括气缸,所述气缸通过连接板与滑动构件连接,所述滑动构件通过遮挡安装板与遮挡板连接。
15.作为本实用新型的进一步改进,所述测量平台包括底板,所述底板上设有减震垫,所述减震垫上设有y轴移动组件,所述y轴移动组件分别与x轴移动组件、z轴移动组件连接;所述x轴移动组件上设有用于放置待测产品的夹具,所述x轴移动组件包括x轴底板以及位于x轴底板上的x方向拖链、x方向导轨和x轴驱动机构,所述夹具与x轴驱动机构连接,并与x方向导轨滑动连接,所述x轴驱动机构与x方向拖链连接,所述x方向拖链位于夹具的中部下方;所述z轴移动组件连接激光检测头;所述激光检测头位于夹具的上方。
16.采用此技术方案,通过设置底板和减震垫,起到防震和减震的作用,通过x轴移动组件、y轴移动组件组合形成xy运动平台,通过运动平台工作,使测量点可以准确的移动到激光检测头的正下方,通过z轴移动机构,可以调节激光检测头的高度位置,使激光检测头在能够测量不同的高度的检测点,而且避免了因测量点的高度不一致和激光头量程原因造成的测量误差,提高了测量的精度。将x方向拖链优化安装到夹具的下方中间位置,在满足使用要求的前提下,使得尺寸小巧,结构紧凑。
17.作为本实用新型的进一步改进,所述x轴驱动机构包括x轴驱动马达,所述x轴驱动马达为侧置轴马达。
18.作为本实用新型的进一步改进,所述y轴移动组件包括y轴底板以及位于y轴底板上的y轴驱动机构、y方向拖链、y方向导轨,所述y轴驱动机构与y方向拖链连接,并与x轴底板连接,所述y轴底板位于减震垫上。其中,所述y轴驱动机构包括y轴驱动马达。
19.作为本实用新型的进一步改进,所述z轴移动组件包括z轴支架和z轴驱动机构,所述z轴驱动机构与z轴支架连接,所述z轴支架与y轴底板连接,所述z轴驱动机构与激光检测头连接。
20.进一步的,所述z轴支架为倒l型。所述z轴支架设有若干镂空。
21.作为本实用新型的进一步改进,所述夹爪机构、飞尘遮挡组件和高度测量模块均为两组,两组夹爪机构、两组飞尘遮挡组件、两组高度测量模块分别设置在机架的两侧,所述输送机构位于两组夹爪机构的外侧。采用此技术方案,可以同时进行两个产品的测试,效率更高。
22.与现有技术相比,本实用新型的有益效果为:
23.采用本实用新型的技术方案,可以将产品自动送料进行高度检测,而且检测结果准确度高,提高了生产效率,降低了成本。
附图说明
24.图1是本实用新型实施例一种高度测量装置的结构示意图。
25.图2是本实用新型实施例一种高度测量装置的正视图。
26.图3是本实用新型实施例一种高度测量装置的俯视内部结构示意图。
27.图4是本实用新型实施例的夹爪机构的结构示意图。
28.图5是本实用新型实施例的第一夹爪模块的结构示意图。
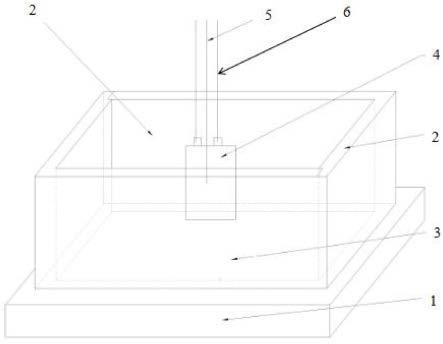
29.图6是本实用新型实施例的高度测量模块的结构示意图。
30.图7是本实用新型实施例的高度测量模块的侧视图。
31.图8是本实用新型实施例的飞尘遮挡组件的结构示意图。
32.附图标记包括:
33.100-机架,200-机罩,300-传送带,400-右夹爪机构,500-左夹爪机构,600-左高度测量模块,700-右高度测量模块,800-左飞尘遮挡组件,900-右飞尘遮挡组件;
34.401-右夹爪支架,402-第一右夹爪模块,403-第二右夹爪模块;
35.501-左夹爪支架,502-第一左夹爪模块,503-第二左夹爪模块;
36.511-y轴移动机构,512-z轴移动机构,513-夹爪组件,514-夹爪安装架,515-夹爪气缸,516-夹爪;
37.601-第一左高度测量模块,602-第二左高度测量模块;
38.611-底板,612-减震垫,613-y轴底板,614-y轴驱动机构,615-y方向导轨,616-x轴底板,617-y方向拖链,618-x方向拖链,619-x方向导轨,620-x轴驱动机构,621-夹具,622-激光检测头,623-z轴驱动机构,624-z轴支架;
39.701-第一右高度测量模块,702-第二右高度测量模块,
40.801-支撑板,802-气缸,803-浮动接头,804-连接板,805-调速阀,806-滑轨,807-滑动板,808-遮挡安装板,809-遮挡板。
具体实施方式
41.下面结合附图,对本实用新型的较优的实施例作进一步的详细说明。
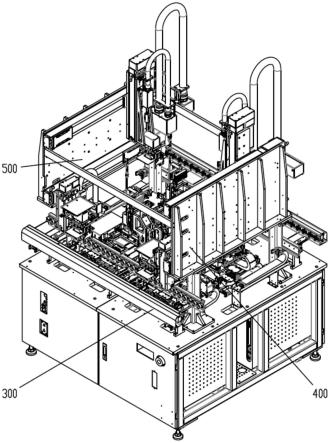
42.如图1~图8所示,一种高度测量装置,其包括机架100,所述机架100上设有机罩200、输送机构、镜像对称设置在机架100的两侧的两组夹爪机构、两组飞尘遮挡组件和四组高度测量模块,所述两组夹爪机构为结构相同的左夹爪机构500、右夹爪机构400,两者对称设置在机架100上。两组飞尘遮挡组件为结构相同的左飞尘遮挡组件800和右飞尘遮挡组件900,所述四组高度测量模块分别为结构相同的第一左高度测量模块601、第二左高度测量模块602、第一右高度测量模块701和第二右高度测量模块702,所述第一左高度测量模块601、第二左高度测量模块602位于机架100的左侧,所述第一右高度测量模块701和第二右高度测量模块702位于机架100的右侧,对称设置。对应的,所述左夹爪机构500、左飞尘遮挡组件800位于第一左高度测量模块601、第二左高度测量模块602这一侧,所述右夹爪机构400右飞尘遮挡组件900位于第一右高度测量模块701、第二右高度测量模块702这一侧。也就是每组均包含一组夹爪机构、一组飞尘遮挡组件和两组高度测量模块,共用输送机构。两组飞尘遮挡组件均包括移动驱动机构和遮挡板,所述遮挡板位于对应的夹爪机构抓取的产品的上方,所述夹爪机构抓取产品移动时,所述移动驱动机构驱动遮挡板同方向移动。其中,所述输送机构为传送带300。
43.具体而言,所述右夹爪机构400包括右夹爪支架401、第一右夹爪模块402、第二右夹爪模块403,所述第一右夹爪模块402、第二右夹爪模块403与右夹爪支架401连接,所述第一右夹爪模块402位于第二右夹爪模块403的上方;所述左夹爪机构500包括左夹爪支架501、第一左夹爪模块502、第二左夹爪模块503,所述第一左夹爪模块502、第二左夹爪模块503与左夹爪支架501连接,所述第一左夹爪模块502位于第二左夹爪模块503的上方。
44.如图4所示,所述第一左夹爪模块502、第二左夹爪模块503、第一右夹爪模块402、
第二右夹爪模块403的结构相同,下面以第二左夹爪模块503进行说明。如图5所示,所述第二左夹爪模块503包括y轴移动机构511、z轴移动机构512、夹爪组件513,所述y轴移动机构511通过z轴移动机构512与夹爪组件513连接。所述夹爪组件513包括夹爪安装架514、夹爪气缸515和夹爪516,所述夹爪安装架514与z轴移动机构512连接,所述夹爪气缸515固定在夹爪安装架514上,与夹爪516连接。
45.左飞尘遮挡组件800和右飞尘遮挡组件900结构相同,下面以左飞尘遮挡组件800进行说明。如图8所示,所述左飞尘遮挡组件800包括支撑板801和移动驱动机构,所述移动驱动机构与支撑板801连接,所述支撑板801上设有滑轨806,所述遮挡板809通过滑动板807与滑轨806连接,所述移动驱动机构与滑动板807连接。进一步的,所述移动驱动机构包括气缸802,所述气缸802通过浮动接头803与连接板804连接,所述连接板804与滑动板807连接,所述滑动构件通过遮挡安装板808与遮挡板809连接。所述气缸802连接调速阀805。
46.如图6和图所示,对于四个高度测量模块,均包括激光检测头622和测量平台,所述测量平台包括底板611,所述底板611上设有减震垫612,所述减震垫612上设有y轴移动组件,所述y轴移动组件分别与x轴移动组件、z轴移动组件连接;所述x轴移动组件上设有x夹具621,所述x轴移动组件包括x轴底板616以及位于x轴底板616上的x方向拖链618、x方向导轨619和x轴驱动机构620,所述x夹具621与x轴驱动机构620连接,并与x方向导轨619滑动连接,所述x轴驱动机构620与x方向拖链618连接,所述x方向拖链618位于x夹具621的中部下方;所述z轴移动组件连接用于高度测量的激光检测头622;所述激光检测头622位于x夹具621的上方。
47.所述y轴移动组件包括y轴底板613以及位于y轴底板613上的y轴驱动机构614、y方向拖链617、y方向导轨615,所述y轴驱动机构614与y方向拖链617连接,并与x轴底板6161连接。所述y方向拖链617位于x轴底板616的下方或一侧。
48.所述z轴移动组件包括z轴支架624和z轴驱动机构623,所述z轴驱动机构623与z轴支架624连接,所述z轴支架624与y轴底板613连接,所述z轴驱动机构623与激光检测头622连接。所述z轴支架624为倒l型。
49.所述x轴驱动机构620包括x轴驱动马达,所述x轴驱动马达为侧置轴马达。所述y轴驱动机构614包括y轴驱动马达。
50.采用此高度测量模块,整个运动和测量机构固定在减震垫612上,起到防震和减震作用,有利于提高测量的精度。y轴移动组件和x轴移动组件组合起来搭建xy运动平台,运动平台工作使测量点移动到激光检测头622的正下方,可以满足多个位置测量需要。将激光检测头622安装到z轴移动组件上,使激光检测头622在能够测量不同的高度的检测点,解决因测量点的高度不一致和激光头量程原因造成的测量不准的问题。选用侧置轴马达,将x方向拖链618优化安装到x夹具621的中间位置,减少y方向尺寸,在满足使用要求的前提下,通过这些方式使得尺寸小巧,结构紧凑。
51.工作时,夹爪516将产品从传送带300抓取到x夹具621上,x夹具621动作完成产品定位。定位完成后,y轴驱动机构614和x轴驱动机构620同时动作,将设定的产品的测量点移动到激光检测头622都正下方,产品移动的同时z轴驱动机构623同时调整好激光检测头622的高度。激光检测头622检测完成后,y轴驱动机构614和x轴驱动机构620运动带动x夹具621移动到初始位置,等待夹爪516将产品取走,可以将测量数据传送到plc,plc处理后上次系
统保存。
52.采用本实施例的技术方案,初始状态,第二左夹爪模块503和第二右夹爪模块403分别停在传送带300的正上方,所述第一左夹爪模块502停在左测试模块的上方,所述第一右夹爪模块402停在右测试模块的上方。
53.传送带300将第一个产品输送到第二左夹爪模块503的下方,第二左夹爪模块503的夹爪工作将产品抓取放到左高度测量模块600的夹具上,第二左夹爪模块503的工作流程为:z轴移动机构512下降,夹爪气缸515动作,夹爪抓取产品,z轴移动机构512上升,y轴移动机构511带动产品运到到第一左高度测量模块601的上方,第二左夹爪模块503的z轴移动机构512下降,夹爪气缸515动作,夹爪松开放置产品,z轴移动机构512上升。此过程中,左飞尘遮挡组件800动作,遮挡板遮住产品,防止夹爪在运动过程中掉落飞尘,左高度测量模块600工作,完成测试。传送带300将第二个产品输送到第二右夹爪模块403下方,第二右夹爪模块403工作将产品抓取放到右高度测量模块700上(第二右夹爪模块403的工作流程和第二左夹爪模块503的一样),右飞尘遮挡组件900动作遮住产品,右高度测量模块700工作进行测量。第三个产品通过传送带300和第二左夹爪模块503输送到第二左高度测量模块602,第四个产品通过传送带300和第二右夹爪模块403输送到第二右高度测量模块702。第一左高度测量模块601、第二左高度测量模块602、第一右高度测量模块701、第二右高度测量模块702轮流接收产品进行测量。当第一左高度测量模块601上的产品完成测试后,第一左夹爪模块502工作,将产品从第一左高度测量模块601上取放到传送带300,第一左夹爪模块502工的工作流程和第二左夹爪模块503的工作流程相反。第二左高度测量模块602、第一右高度测量模块701、第二右高度测量模块702完成测量后,也同样处理,将产品抓取到传送带300上。这样,一台设备可以同时进行四个产品的高度测量,而且该装置占地小,提高了生产效率,降低了成本。
54.以上所述之具体实施方式为本实用新型的较佳实施方式,并非以此限定本实用新型的具体实施范围,本实用新型的范围包括并不限于本具体实施方式,凡依照本实用新型之形状、结构所作的等效变化均在本实用新型的保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。