1.本发明涉及医疗器械技术领域,特别涉及一种内科用穿刺定位装置。
背景技术:
2.穿刺,医学常用手术用语,其范围主要包括将穿刺针刺入体腔抽取分泌物做化验、向体腔注入气体或造影剂做造影检查、或向体腔内注入药物等;穿刺的目的是抽血化验、输血、输液或置入导管做血管造影等。对于内科,常见的穿刺操作有胸穿、腹穿、腰穿和骨穿等,通常需要至少一名医生进行操作,穿刺点的确定、穿刺角度的选择、穿刺深度及刺入过程的细节把控都至关重要,这些工作需要经验丰富的医生才能胜任,对于实习期或刚过实习期的医生,显然缺乏实操经验,需要器械辅助。
3.如专利号为202110140938.3的专利提出了一种心内科穿刺定位装置,包括主体机构、定位机构和穿刺机构,该发明通过设置移动杆和定位板进行双重定位,同时配合定位激光灯实现精准定位,通过螺旋机构控制穿刺针的运动,可有效避免误操作对患者造成伤害,但是该装置工作空间小、适用范围窄,且无法模仿穿刺手法,对此,设计一种工作空间大、调节灵活、适用面广、可模拟穿刺手法、可辅助固定穿刺针的穿刺定位装置,成了一个亟待解决的技术问题。
技术实现要素:
4.针对上述技术问题,本发明采用的技术方案为:一种内科用穿刺定位装置,包括支撑部件、粗定位部件、精定位部件、锁销组件、夹持组件;粗定位部件滑动安装在支撑部件上;精定位部件与粗定位部件通过球铰副连接;粗定位部件包括二自由度复式共点球面四杆机构;二自由度复式共点球面四杆机构上设置有第一伸缩部;第一伸缩部上可拆卸地安装有一个锁销组件;精定位部件包括由摆动摇杆机构、齿轮机构和螺旋机构构成的旋进式组合机构,旋进式组合机构具有两个自由度,分别为往复摆动和往复移动;夹持组件转动安装在旋进式组合机构上;旋进式组合机构上设置有第二伸缩部;第二伸缩部上可拆卸地安装有一个锁销组件。
5.进一步地,支撑部件包括主框架、插销、滑板、第一电机、滑台、第一螺杆、第一插孔、第二插孔、控制面板、上夹板、下夹板、第一导杆、第二螺杆;主框架为l形;滑板滑动安装在主框架第一端;上夹板和两个第一导杆固定安装在主框架第二端;第二螺杆转动安装在主框架第二端;下夹板两端分别与两个第一导杆滑动连接;下夹板中部与第二螺杆配合构成一螺旋副;滑板上设置有多个等距分布的第一插孔;主框架第一端上设置有多个等距分布的第二插孔;第一插孔的间距与第二插孔的间距相等;第一插孔和第二插孔用于可拆卸地插入插销;控制面板固定安装在主框架第二端上;滑台固定安装在滑板上;第一螺杆铰接在滑台上;第一电机固定安装在滑台上;第一电机的输出轴与第一螺杆固定连接。
6.进一步地,二自由度复式共点球面四杆机构包括第三螺杆、第一支架、第一蜗杆、第一支板、第一蜗轮、第二蜗轮、第二支架、第二蜗杆、弧形支架、十字轴、第一套筒、第一支
座、第三支架、滑键、第一滑槽、第二滑槽、驱动螺纹;第一支架和第二支架分别固定安装在第一支板上;两个弧形支架固定安装在第一支板上;第一蜗杆和第一蜗轮分别铰接在第一支架上;第一蜗杆和第一蜗轮相互啮合;第一蜗轮内孔上设置有四个圆周均布的第二滑槽;每个第二滑槽内固定安装有一个滑键;第二蜗杆和第二蜗轮分别铰接在第二支架上;第二蜗杆和第二蜗轮相互啮合;第二蜗轮内孔上设置有驱动螺纹;第三螺杆同时插入第一蜗轮和第二蜗轮内;第三螺杆上设置有四个圆周均布的第一滑槽;第三螺杆与驱动螺纹配合构成一螺旋副;第一滑槽与滑键配合构成移动副;第一支座固定安装在第三螺杆上;第一套筒铰接在第一支座上;十字轴第一端转动安装在第一套筒内;十字轴第二端和第三端分别铰接在第三支架内;第三支架两端分别与弧形支架铰接;第三螺杆的旋转轴线、十字轴第一端的旋转轴线、十字轴第二端和第三端的旋转轴线、第三支架的旋转轴线共同汇交于一点。
7.进一步地,第一伸缩部包括第一滑杆、紧定螺钉、球支座、第三插孔、第四插孔;多个第四插孔等距设置在十字轴第四端上;多个第三插孔等距设置在第一滑杆上;第一滑杆滑动安装在十字轴第四端上;第三插孔和第四插孔数量相同,且第三插孔和第四插孔用于容置锁销组件;球支座固定安装在第一滑杆上;球支座上设置有与紧定螺钉配合的贯穿的螺孔。
8.进一步地,粗定位部件还包括第一滑块、第二电机、第三电机;第一滑块与第一支板固定连接;第一滑块与滑台滑动配合;第一滑块与第一螺杆配合构成一螺旋副;第二电机和第三电机分别固定安装在第一滑块上;第二电机输出轴与第二蜗杆固定连接;第三电机输出轴与第一蜗杆固定连接。
9.进一步地,旋进式组合机构包括第二支板、第四支架、第二滑块、第二导杆、第四螺杆、第一磁铁、拨杆、激光灯、第四电机、摆杆、第二套筒、第三套筒、弯杆、第一齿轮、第二齿轮;第四支架固定安装在第二支板上;第一齿轮和第二齿轮分别铰接在第二支板上;第一齿轮和第二齿轮相互啮合;第四电机固定安装在第四支架上;第四电机输出轴与第二齿轮固定连接;第二套筒铰接在第一齿轮上;摆杆第一端铰接在第二齿轮上;摆杆第二端插入第二套筒内;摆杆与第二套筒滑动配合;第三套筒固定安装在摆杆第二端上;两个第一磁铁固定安装在第四支架上;拨杆第一端转动安装在第四支架上;拨杆为不锈钢材质,用于与第一磁铁吸附;两个第一磁铁上用于与拨杆接触的接触面互相垂直;拨杆第二端固定安装有一个激光灯;激光灯发出的光线与第一齿轮转动轴重合;第一齿轮上设置有用于通过激光灯发出的光线的通孔;第二导杆固定安装在第二支板上;第四螺杆固定安装在第二齿轮上;第二滑块第一端滑动安装在第二导杆上;第二滑块中部与第四螺杆配合构成一螺旋副;弯杆为l形;弯杆第一端与第二端垂直;弯杆第一端滑动安装在第三套筒内。
10.进一步地,第四螺杆的螺距不大于2cm。
11.进一步地,第二伸缩部包括球头、心轴、第二滑杆、第五插孔、第六插孔;第二滑杆固定安装在第二支板上;心轴与第二滑杆滑动配合;球头固定安装在心轴上;球头与球支座配合构成一球铰副;第二滑杆上设置有多个等距分布的第五插孔;心轴上设置有多个等距分布的第六插孔;第五插孔和第六插孔数量相同,且第五插孔和第六插孔用于容置锁销组件。
12.进一步地,夹持组件包括端盖、滑孔、螺母、螺柱、第二磁铁、第三支座、抓手;端盖铰接在第二滑块第二端上;螺柱固定安装在端盖上;螺母与螺柱配合构成一螺旋副;多个第
三支座圆周均布地固定安装在螺柱上;每个第三支座上铰接有一个抓手;每个抓手第一端固定安装有一个第二磁铁;第二磁铁与螺母滑动配合,且第二磁铁与螺母相互吸附;滑孔设置在端盖内;滑孔与弯杆第二端滑动配合;端盖和螺柱均为中空设置,用于通过激光灯发射出的光线。
13.进一步地,锁销组件包括挡圈、柱销、止推杆、第二支座、弹簧、豁口;柱销固定安装在挡圈上;第二支座固定安装在柱销上;止推杆铰接在第二支座上;弹簧两端分别固定安装在柱销和止推杆上;豁口设置在柱销上,用于容置止推杆。
14.本发明与现有技术相比的有益效果是:(1)支撑部件具备两个自由度,可根据病人的体型做适应性调整;(2)粗定位部件采用二自由度复式共点球面四杆机构,具备较大的工作空间,且末端采用手动调节的伸缩结构,进一步扩大了工作空间;(3)精定位部件采用由摆动摇杆机构、齿轮机构和螺旋机构构成的旋进式组合机构,可实现沿直线往复移动的同时、绕着直线往复摆动的运动,从而实现穿刺手法的模拟;(4)夹持组件具备自锁特性,可实现对不同种类或规格的穿刺针的可靠夹持;(5)激光灯可辅助定位穿刺点;(6)整机穿刺后可带针悬停,使医生可以腾出手进行其他操作,提高了医生的工作效率。
附图说明
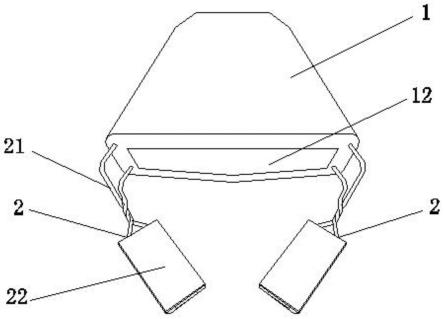
15.图1为本发明的整体结构示意图。
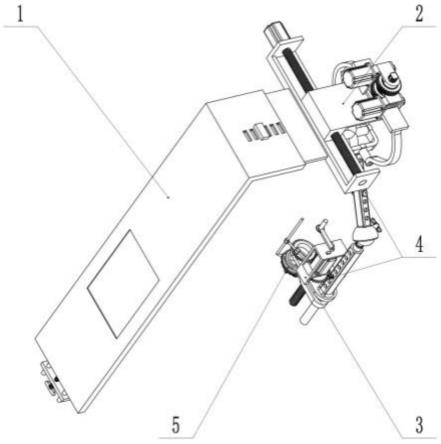
16.图2为本发明支撑部件的结构示意图。
17.图3为本发明粗定位部件的结构示意图一。
18.图4为本发明粗定位部件的结构示意图二。
19.图5为本发明粗定位部件的局部结构放大示意图。
20.图6为本发明第一蜗轮的零件结构示意图。
21.图7为本发明第二蜗轮的零件结构示意图。
22.图8为本发明精定位部件的结构示意图一。
23.图9为本发明精定位部件的结构示意图二。
24.图10为本发明锁销组件的结构示意图。
25.图11为本发明夹持组件的结构示意图。
26.图中:1-支撑部件;2-粗定位部件;3-精定位部件;4-锁销组件;5-夹持组件;
27.101-主框架;102-插销;103-滑板;104-第一电机;105-滑台;106-第一螺杆;107-第一插孔;108-第二插孔;109-控制面板;110-上夹板;111-下夹板;112-第一导杆;113-第二螺杆;
28.201-第一滑块;202-第二电机;203-第三电机;204-第三螺杆;205-第一支架;206-第一蜗杆;207-第一支板;208-第一蜗轮;209-第二蜗轮;210-第二支架;211-第二蜗杆;212-弧形支架;213-十字轴;214-第一套筒;215-第一支座;216-第三支架;217-第一滑杆;218-紧定螺钉;219-球支座;220-第三插孔;221-第四插孔;222-滑键;
29.20401-第一滑槽;
30.20801-第二滑槽;
31.20901-驱动螺纹;
32.301-球头;302-心轴;303-第二滑杆;304-第五插孔;305-第六插孔;306-第二支
板;307-第四支架;308-第二滑块;309-第二导杆;310-第四螺杆;311-第一磁铁;312-拨杆;313-激光灯;314-第四电机;315-摆杆;316-第二套筒;317-第三套筒;318-弯杆;319-第一齿轮;320-第二齿轮;
33.401-挡圈;402-柱销;403-止推杆;404-第二支座;405-弹簧;406-豁口;
34.501-端盖;502-滑孔;503-螺母;504-螺柱;505-第二磁铁;506-第三支座;507-抓手。
具体实施方式
35.下面结合附图并通过具体实施方式来进一步说明本发明的技术方案。
36.其中,附图仅用于示例性说明,表示的仅是示意图,而非实物图,不能理解为对本专利的限制;为了更好地说明本发明的实施例,附图某些部件会有省略、放大或缩小,并不代表实际产品的尺寸;对本领域技术人员来说,附图中某些公知结构及其说明可能省略是可以理解的。
37.图1~图11为本发明的优选实施例。
38.如图1所示,本实施例的内科用穿刺定位装置,包括支撑部件1、粗定位部件2、精定位部件3、锁销组件4、夹持组件5;粗定位部件2滑动安装在支撑部件1上;精定位部件3与粗定位部件2通过球铰副连接;粗定位部件2包括二自由度复式共点球面四杆机构;二自由度复式共点球面四杆机构上设置有第一伸缩部;第一伸缩部上可拆卸地安装有一个锁销组件4;精定位部件3包括由摆动摇杆机构、齿轮机构和螺旋机构构成的旋进式组合机构,旋进式组合机构具有两个自由度,分别为往复摆动和往复移动;夹持组件5转动安装在旋进式组合机构上;旋进式组合机构上设置有第二伸缩部;第二伸缩部上可拆卸地安装有一个锁销组件4。
39.如图2所示,支撑部件1中,主框架101为l形;滑板103滑动安装在主框架101第一端;上夹板110和两个第一导杆112固定安装在主框架101第二端;第二螺杆113转动安装在主框架101第二端;下夹板111两端分别与两个第一导杆112滑动连接;下夹板111中部与第二螺杆113配合构成一螺旋副;滑板103上设置有多个等距分布的第一插孔107;主框架101第一端上设置有多个等距分布的第二插孔108;第一插孔107的间距与第二插孔108的间距相等;第一插孔107和第二插孔108用于可拆卸地插入插销102;控制面板109固定安装在主框架101第二端上;滑台105固定安装在滑板103上;第一螺杆106铰接在滑台105上;第一电机104固定安装在滑台105上;第一电机104的输出轴与第一螺杆106固定连接。
40.如图3、图4和图5所示,粗定位部件2中,第一滑块201与第一支板207固定连接;第一滑块201与滑台105滑动配合;第一滑块201与第一螺杆106配合构成一螺旋副;第二电机202和第三电机203分别固定安装在第一滑块201上;第二电机202输出轴与第二蜗杆211固定连接;第三电机203输出轴与第一蜗杆206固定连接;粗定位部件2还包括二自由度复式共点球面四杆机构和第一伸缩部;二自由度复式共点球面四杆机构中,第一支架205和第二支架210分别固定安装在第一支板207上;两个弧形支架212固定安装在第一支板207上;第一蜗杆206和第一蜗轮208分别铰接在第一支架205上;第一蜗杆206和第一蜗轮208相互啮合;第一蜗轮208内孔上设置有四个圆周均布的第二滑槽20801,如图6所示;每个第二滑槽20801内固定安装有一个滑键222;第二蜗杆211和第二蜗轮209分别铰接在第二支架210上;
第二蜗杆211和第二蜗轮209相互啮合;第二蜗轮209内孔上设置有驱动螺纹20901,如图7所示;第三螺杆204同时插入第一蜗轮208和第二蜗轮209内;第三螺杆204上设置有四个圆周均布的第一滑槽20401;第三螺杆204与驱动螺纹20901配合构成一螺旋副;第一滑槽20401与滑键222配合构成移动副;第一支座215固定安装在第三螺杆204上;第一套筒214铰接在第一支座215上;十字轴213第一端转动安装在第一套筒214内;十字轴213第二端和第三端分别铰接在第三支架216内;第三支架216两端分别与弧形支架212铰接;第三螺杆204的旋转轴线、十字轴213第一端的旋转轴线、十字轴213第二端和第三端的旋转轴线、第三支架216的旋转轴线共同汇交于一点;第一伸缩部中,多个第四插孔221等距设置在十字轴213第四端上;多个第三插孔220等距设置在第一滑杆217上;第一滑杆217滑动安装在十字轴213第四端上;第三插孔220和第四插孔221数量相同,且第三插孔220和第四插孔221用于容置锁销组件4;球支座219固定安装在第一滑杆217上;球支座219上设置有与紧定螺钉218配合的贯穿的螺孔。
41.本实施例中,第一蜗杆206和第二蜗杆211头数均为1、模数均为2;第一蜗轮208和第二蜗轮209齿数均为28、模数均为2。
42.如图8和图9所示,精定位部件3包括旋进式组合机构和第二伸缩部;旋进式组合机构中,第四支架307固定安装在第二支板306上;第一齿轮319和第二齿轮320分别铰接在第二支板306上;第一齿轮319和第二齿轮320相互啮合;第四电机314固定安装在第四支架307上;第四电机314输出轴与第二齿轮320固定连接;第二套筒316铰接在第一齿轮319上;摆杆315第一端铰接在第二齿轮320上;摆杆315第二端插入第二套筒316内;摆杆315与第二套筒316滑动配合;第三套筒317固定安装在摆杆315第二端上;两个第一磁铁311固定安装在第四支架307上;拨杆312第一端转动安装在第四支架307上;拨杆312为不锈钢材质,用于与第一磁铁311吸附;两个第一磁铁311上用于与拨杆312接触的接触面互相垂直;拨杆312第二端固定安装有一个激光灯313;激光灯313发出的光线与第一齿轮319转动轴重合;第一齿轮319上设置有用于通过激光灯313发出的光线的通孔;第二导杆309固定安装在第二支板306上;第四螺杆310固定安装在第二齿轮320上;第四螺杆310的螺距不大于2cm,本实施例中第四螺杆310的螺距为0.5cm;第二滑块308第一端滑动安装在第二导杆309上;第二滑块308中部与第四螺杆310配合构成一螺旋副;弯杆318为l形;弯杆318第一端与第二端垂直;弯杆318第一端滑动安装在第三套筒317内;第二伸缩部中,第二滑杆303固定安装在第二支板306上;心轴302与第二滑杆303滑动配合;球头301固定安装在心轴302上;球头301与球支座219配合构成一球铰副;第二滑杆303上设置有多个等距分布的第五插孔304;心轴302上设置有多个等距分布的第六插孔305;第五插孔304和第六插孔305数量相同,且第五插孔304和第六插孔305用于容置锁销组件4。
43.本实施例中,第一齿轮319和第二齿轮320的齿数均为30、模数均为2。
44.如图10所示,锁销组件4中,柱销402固定安装在挡圈401上;第二支座404固定安装在柱销402上;止推杆403铰接在第二支座404上;弹簧405两端分别固定安装在柱销402和止推杆403上;豁口406设置在柱销402上,用于容置止推杆403。
45.如图11所示,夹持组件5中,端盖501铰接在第二滑块308第二端上;螺柱504固定安装在端盖501上;螺母503与螺柱504配合构成一螺旋副;多个第三支座506圆周均布地固定安装在螺柱504上;每个第三支座506上铰接有一个抓手507;每个抓手507第一端固定安装
有一个第二磁铁505;第二磁铁505与螺母503滑动配合,且第二磁铁505与螺母503相互吸附;滑孔502设置在端盖501内;滑孔502与弯杆318第二端滑动配合,如图8或图9所示;端盖501和螺柱504均为中空设置,用于通过激光灯313发射出的光线。
46.本实施例中的第一电机104、第二电机202、第三电机203和第四电机314均采用42步进电机。
47.本发明的工作原理:本发明使用前,需要先将支撑部件1固定安装在床上,通过手动旋转第二螺杆113,调整上夹板110和下夹板111之间的间距,从而使上夹板110和下夹板111夹紧检查床;根据检查床的宽度或病人的体型,通过手动插拔插销102,调整滑板103插入主框架101的深度。
48.使用时,通过控制面板109,驱动各个电机动作。
49.对于粗定位组件中的二自由度复式共点球面四杆机构,当第一蜗轮208固定不动、第二蜗轮209转动时,第三螺杆204沿着自身轴线往复移动,进而通过第一套筒214驱动十字轴213偏转,从而改变十字轴213第一端轴线与第三螺杆204轴线之间的偏转角大小;当第一蜗轮208和第二蜗轮209差速转动且转速均大于零时,第三螺杆204既沿着自身轴线往复移动,同时沿着自身轴线转动;当第一蜗轮208和第二蜗轮209同速转动时,第三螺杆204只有沿着自身轴线转动的运动;设十字轴213两个方向上的轴线的交点为其中心点,则无论第三螺杆204是否沿着自身轴线往复移动,当第三螺杆204转动时,均会通过第一套筒214驱动十字轴213运动,且十字轴213的运动为绕着其中心点的圆锥运动;在十字轴213第四端与第一滑杆217相对位置确定的情况下,球支座219中心的轨迹,即二自由度复式共点球面四杆机构的工作空间为一个半球形环面。
50.事先拧松紧定螺钉218,使得球头301可在球支座219内灵活转动,则二自由度复式共点球面四杆机构驱动球支座219在前述工作空间内运动时,精定位部件3会受重力作用始终自然下垂,也可被人为驱动;当粗定位部件2工作至预定位置后,手动调节精定位部件3的角度,接着拧紧紧定螺钉218,使精定位部件3相对于粗定位部件2的位姿被锁定,上述过程中,激光灯313开启,激光束打在对应皮肤的穿刺点处,以辅助定位。
51.接着,手动驱动螺母503,使得各个抓手507的第二端张开,然后放入穿刺针,再手动驱动螺母503,使得各个抓手507的第二端夹紧穿刺针;无论螺母503相对螺柱504沿哪个方向移动,第二磁铁505始终可以吸附在螺母503上。
52.进一步地,通过控制第四电机314转动,带动第二齿轮320转动,第二齿轮320带动第四螺杆310转动的同时,还会驱动第一齿轮319转动;第四螺杆310转动时,通过第二滑块308带动夹持组件5移动,同时,第一齿轮319通过第二套筒316带动摆杆315摆动,摆杆315通过第三套筒317带动弯杆318运动,弯杆318通过端盖501上的滑孔502带动端盖501往复转动,即带动夹持组件5往复转动,从而实现穿刺针刺入皮肤的同时,穿刺针还有一个往复旋转的运动,该运动尤其适合骨穿作业。
53.穿刺成功后,将拨杆312从图8所示位置,拨动90
°
,与另一个第一磁铁311吸附,使得穿刺针轴线贯穿的空间暴露出来,便于医生向穿刺针上连接管路。
54.对于锁销组件4,用于调节第一滑杆217和第二滑杆303的位置,以适应不同体型的病人、或改变机构总的工作空间;一手按下止推杆403,另一手捏住挡圈401,即可实现锁销组件4的插拔;止推杆403上设置有与柱销402接触的限位面,用于限制止推杆403相对于柱
销402的转角范围,当弹簧405弹出止推杆403、止推杆403与第一滑杆217或第二滑杆303外表面接触时,即与挡圈401一起,将锁销组件4锁定在第一滑杆217或第二滑杆303上。
55.通过改变第四螺杆310的螺距,可实现第四螺杆310转动一圈时,穿刺针刺入皮肤深度值调控;通过设定第一齿轮319与第二齿轮320的齿数比,可实现第四螺杆310转动一圈时,穿刺针往复转动的角度范围值的调控;综合考虑螺距和齿数比,可实现穿刺针刺入特定深度的同时往复转动特定的转角。
56.本发明不局限上述具体实施方式,所属技术领域的技术人员从上述构思出发,不经过创造性的劳动,做出的种种变换,均落在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。