技术特征:
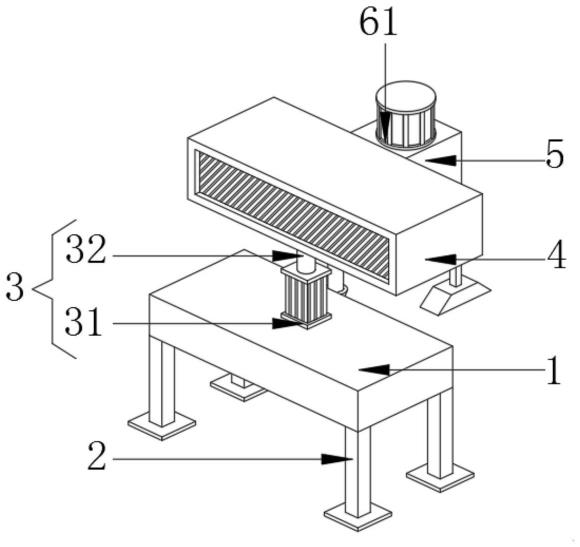
1.一种医疗机器人基于6d位姿自动配准的方法,其特征在于:具体包括以下步骤:步骤一、首先患者躺在医疗床上,并且将自动配准设备移动至医疗床的边缘,通过对高度位置的调节,利用3d结构光相机对标定识别物进行图像数据的采集;步骤二、将采集的数据传输到三维点云的处理算法中,并对数据进行分析、整合和提取,最后进行三维重建;步骤三、最后通过建立的模型,并配合上医疗机器人实现自动化的配准操作,实现自动化的微创手术;其中,步骤一所述的自动配准设备中包括放置台(1),所述放置台(1)的底部固定连接有底柱(2),其特征在于:所述放置台(1)的顶部通过伸缩组件(3)使得支撑台(4)移动,所述支撑台(4)的一侧设置有移动台(5),所述移动台(5)的内部设置有相机摆动机构(6);所述相机摆动机构(6)中包括驱动电机(61),所述驱动电机(61)固定安装在移动台(5)的顶部,所述驱动电机(61)输出轴的一端通过联轴器固定连接有驱动转轴(62),且驱动转轴(62)的表面通过扫描停歇机构(63)使得副动转轴(64)转动,所述副动转轴(64)的表面通过转动组件(65)在支撑台(4)的内部进行移动,所述副动转轴(64)的顶部通过限位组件(66)与支撑台(4)内腔的顶部移动,且副动转轴(64)的底端贯穿延伸至支撑台(4)的下方并固定连接有手术针(67),所述驱动转轴(62)的表面通过啮合组件(68)使得支撑转轴(610)转动,且支撑转轴(610)的两端与移动台(5)的内壁转动连接,所述支撑转轴(610)的表面固定连接有支撑齿轮(611),所述移动台(5)的内部转动连接有中心杆(612),所述中心杆(612)的表面固定连接半圆板(613),且半圆板(613)的表面通过摆动组件(69)使得圆弧齿条(614)移动,所述圆弧齿条(614)的表面与支撑齿轮(611)的表面啮合,所述半圆板(613)的底端固定连接有摆动杆(615),所述摆动杆(615)的底端固定连接有相机本体(616);所述摆动组件(69)中包括凸块(69-1)和圆弧条(69-2),所述凸块(69-1)固定安装在半圆板(613)边缘的两侧,所述圆弧条(69-2)的一侧固定安装在半圆板(613)的边缘,所述圆弧齿条(614)的一侧开设有圆弧槽,所述圆弧条(69-2)的外表面与圆弧槽的内表面滑动连接。2.根据权利要求1所述的一种医疗机器人基于6d位姿自动配准的方法,其特征在于:所述啮合组件(68)中包括啮合齿轮(68-1)和啮合环(68-2),所述啮合环(68-2)固定安装在驱动转轴(62)的表面,所述啮合齿轮(68-1)固定安装在支撑转轴(610)的表面,所述啮合齿轮(68-1)和啮合环(68-2)的外表面相啮合。3.根据权利要求1所述的一种医疗机器人基于6d位姿自动配准的方法,其特征在于:所述伸缩组件(3)中包括气缸(31),所述气缸(31)固定安装在放置台(1)的顶部,所述气缸(31)的顶部滑动连接有活塞杆(32),所述活塞杆(32)的顶端与支撑台(4)的底部固定连接。4.根据权利要求1所述的一种医疗机器人基于6d位姿自动配准的方法,其特征在于:所述扫描停歇机构(63)中包括十字轮(63-1)和缺口板(63-2),所述缺口板(63-2)固定安装在驱动转轴(62)的表面,所述十字轮(63-1)固定安装在副动转轴(64)的表面,所述十字轮(63-1)的表面开设有拨动槽(63-3)。5.根据权利要求4所述的一种医疗机器人基于6d位姿自动配准的方法,其特征在于:所述缺口板(63-2)的表面与十字轮(63-1)的表面接触,所述驱动转轴(62)的表面且位于缺口板(63-2)的下方固定连接有延伸杆(63-4),所述延伸杆(63-4)的顶部固定连接有拨动杆
(63-5),所述拨动杆(63-5)的表面与拨动槽(63-3)的内表面接触。6.根据权利要求1所述的一种医疗机器人基于6d位姿自动配准的方法,其特征在于:所述转动组件(65)中包括传动齿轮(65-1)和传动齿条(65-2),所述传动齿轮(65-1)固定安装在副动转轴(64)的外表面,所述传动齿条(65-2)的一侧固定安装在支撑台(4)的内部,所述传动齿轮(65-1)和传动齿条(65-2)的外表面相啮合。7.根据权利要求1所述的一种医疗机器人基于6d位姿自动配准的方法,其特征在于:所述限位组件(66)中包括固定板(66-1)和转动轮(66-2),所述固定板(66-1)的顶部与支撑台(4)内腔的顶部固定连接,所述固定板(66-1)的底部开设有限位槽(66-3),所述转动轮(66-2)转动安装在副动转轴(64)的顶端,所述转动轮(66-2)的外表面与限位槽(66-3)的内表面滑动连接。
技术总结
本发明公开了一种医疗机器人基于6D位姿自动配准的方法,步骤一所述的自动配准设备中包括放置台,本发明涉及医疗临床技术领域。该医疗机器人基于6D位姿自动配准的方法,通过设置有相机摆动机构,利用驱动电机带动驱动转轴的转动,驱动转轴通过啮合组件带动支撑转轴的转动,同时配合扫描停歇机构带动移动台的移动,并通过支撑齿轮与圆弧齿条的啮合,实现相机本体以中心杆为中心进行转动,以此实现驱动电机驱动的同步操作,减少能源的损耗,并且可以扩大相机本体所能够识别的范围,获得拍摄场景下所有物体的立体三维信息,并且无需在医院现场进行二次标定,医生可在医院手术室随时随地的移动该机器人且能保证精度不受影响。地的移动该机器人且能保证精度不受影响。
技术研发人员:姜冠群
受保护的技术使用者:山东卓业医疗科技有限公司
技术研发日:2022.03.29
技术公布日:2022/8/16
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。