1.本发明涉及声音信号处理领域。
2.更具体地,本发明涉及一种自动设置信号处理参数的方法以及实施该方法的设备,所述信号处理参数应用于给定环境中的扬声器广播的信号。
3.本发明尤其应用于汽车领域中,特别是在交通工具乘客舱中的声景的定义中。
背景技术:
4.通常,操作员手动调整交通工具扬声器的滤波器参数来获得车辆内给定的声景,操作员根据其感知调整参数,“通过耳朵”来评估声景。
5.从现有技术已知一种用于自动声学均衡的方法和系统。欧洲专利ep3111667公开了一种方法,该方法通过确定要在扬声器输入的滤波器参数来均衡信号,从而可减小扬声器环境的频率响应与目标频率响应的振幅之间的偏差。
技术实现要素:
6.本发明涉及一种置于环境中的至少一个扬声器广播之前自动设置数字信号的数字处理参数的方法。与现有技术相比,本发明的一个优点是它可以对数字处理参数进行更完整、更准确地设置。
7.本发明涉及一种置于环境中的至少一个扬声器广播之前自动设置数字信号的数字处理参数的方法。根据本发明,该方法包括以下步骤:-确定环境的一组频率响应的步骤,每个所述频率响应通过激活至少一个扬声器的子集来确定;-对至少一个扬声器的每个子集进行均衡的均衡步骤,确定每个子集的至少一个扬声器的滤波器参数,使预定目标频率响应与至少一个扬声器的子集相关联的频率响应之间的偏差最小,所述至少一个扬声器的子集相关联的频率响应在确定一组频率响应的步骤中被确定;
‑ꢀ
对至少一个扬声器的至少一个子集进行均衡的第二均衡步骤,以确定扬声器的滤波器参数,以在要校正的一组频率上,当所有扬声器都处于激活状态时,衰减所获得的环境的频率响应。
8.在一种实施方式中,对至少一个扬声器的子集进行均衡的均衡步骤包括以下子步骤:-使用搁架滤波器的子步骤,确定至少一个扬声器的搁架滤波器,使确定一组频率响应的步骤中确定的频率响应曲线与目标频率响应之间的偏差最小;-曲线调整子步骤,确定带阻滤波器的参数,使得使用搁架滤波器的子步骤中确定的所述频率响应曲线与目标频率响应之间的偏差最小;
‑ꢀ
优化子步骤,通过所述带阻滤波器的参数标准分类所述滤波器;
‑ꢀ
验证子步骤,将在之前子步骤中确定的带阻搁架滤波器应用于所述至少一个扬声器的所述子集来测量所述环境的频率响应,并在将测量出的频率响应与优化子步骤后的理论预期的频率响应进行比较。
9.在一种实施方式中,在曲线调整子步骤中使用的带阻滤波器的数量至少等于在完成应用搁架滤波器的子步骤时获得的频率响应曲线的局部极大值的数量。
10.在一种实施方式中,如果带阻滤波器的增益高于阈值最大增益g
thmax
,其品质因数低于阈值最小品质因数q
thmin
,则在优化子步骤中抑制带阻滤波器。
11.在一种实施方式中,根据本发明所述的方法还包括:
‑ꢀ
相移步骤,将至少一个延迟τ应用于至少一个扬声器的至少一个子集;
‑ꢀ
增益步骤,对至少一个扬声器的至少一个子集进行增益。
12.在一种实施方式中,将至少一个延迟通过在参考点或在参考点附近进行m次测量,使用分数(k x τmax)/m,使其在预先确定的频带上的能量最大化,其中 k 是介于 1 和 m 之间的整数,τmax指最大延迟。
13.在一种实施方式中,所考虑的频带包括频带[70hz; 120hz]。
14.在一种实施方式中,在第二均衡步骤中,第二目标频率响应曲线 rf,c' 确定如下:【数学式1】其中 f 是指频率,rf 是在所有扬声器均处于激活状态时测量出的频率响应,根据在均衡步骤中确定的滤波器参数、在相移步骤中确定的至少一个延迟和增益步骤应用于扬声器广播的正弦扫描型信号的增益测量出,s指正阈值。
15.在一种实施方式中,在确定一组频率响应的步骤中,所述频率响应通过至少一组麦克风中的至少一个麦克风来确定,所述响应被平均到每组麦克风。
16.本发明还涉及一种置于环境中的至少一个扬声器广播之前自动设置数字信号的数字处理参数的设备。根据本发明,该设备包括:
‑ꢀ
确定环境的一组频率响应的装置,每个所述频率响应通过激活至少一个扬声器的子集来确定;
‑ꢀ
另一装置,用于对于至少一个所考虑的扬声器的每个子集,确定该至少一个扬声器的滤波器参数,使预定目标频率响应与与所述至少一个扬声器的子集相关联的频率响应之间的偏差最小。
附图说明
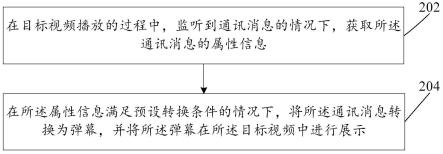
17.【图1】示出了包括扬声器的交通工具乘客舱,其中麦克风位于驾驶员座位和后座以执行一组频率响应测量。
18.【图2】为根据本发明所述的方法的示意图。
19.【图3a】示出了目标频率响应和在交通工具中测量出的两个频率响应的频谱。
20.【图3b】示出了测量出的频率响应和使用了“搁架”滤波器的同一频率响应的频谱。
21.【图3c】示出了使用了“搁架”滤波器的测量出的频率响应和使用带阻型滤波器之
后的同一频率响应的频谱。
22.【图3d】示出了使用“搁架”和带阻滤波器之后获得的理论频率响应和根据本发明所述的方法使用了确定的滤波器的情况下在交通工具的乘客舱中测量出的频率响应的频谱。
23.【图4】示出了目标频率响应和第二目标频率响应。
具体实施方式
24.本发明涉及用于自动设置给定环境中的扬声器的滤波器参数的方法100。
25.为了说明,如图1所示,在以下描述中考虑的环境是交通工具乘客舱1。该示例不限制本发明,本发明可以在其他类型的环境(例如表演厅)中实施。
26.这里考虑一组四个扬声器,包括设置在交通工具1的左右前门的两个前扬声器hp1、hp2,以及设置在交通工具的左右后门的两个扬声器hp3、hp4。本领域技术人员将理解本发明可以应用于不同数量的扬声器。
27.参照图2,方法100的第一步主要在于确定交通工具乘客舱的一组频率响应110。
28.应将“频率响应”理解为交通工具乘客舱对正弦扫描型时间信号的频率响应。
29.在所示示例中,频率响应是通过设置在乘客舱的驾驶员座位上的一组四个麦克风2a或通过设置在后面的乘客座位上的一组四个麦克风2b来确定的。如后文所述,使用的麦克风组(前部或后部)取决于所使用的扬声器。通过平均在一组麦克风(前部或后部)处获得的测量值获得所述组的平均频率响应。因此,这种平均可以平滑测量并减小可能的测量误差和/或不确定性的影响。
30.本领域技术人员将理解可以使用任何数量的麦克风。
31.通过位于前部的两个扬声器hp1、hp2广播正弦扫描型信号,通过平均源自四个麦克风的测量值,确定第一频率响应rf1,而位于后部的两个扬声器处于非激活状态。为了测量第一频率响应 rf1,使用放置在前部的一组麦克风。
32.之后,位于后部的两个扬声器hp3、hp4广播正弦扫描型信号,通过平均源自四个麦克风的测量值,确定第二频率响应rf2,而位于前部的两个扬声器处于非激活状态。为了测量第一频率响应 rf2,使用放置在后部的一组麦克风。
33.因此,完成确定一组频率响应的步骤110后,确定一组两个频率响应rf1、rf2,如图3a所示。
34.之后,在方法100的第二个步骤中,进行均衡步骤120。此步骤的目的是确定一组滤波器 hi并将其应用于由交通工具扬声器hp1、hp2、hp3、hp4 广播的信号,以便更好地接近目标频率响应rf,c,该频率响应定义于本方法实施之前,例如在一组规范中定义。
35.为简单起见,稍后仅考虑确定前部扬声器hp1、hp2的滤波器,其与确定后部扬声器hp3、hp4的滤波器是类似的。
36.因此,均衡步骤120仅在前部hp1、hp2(或后部hp3、hp4)扬声器开启的情况下应用,以确定前部hp1、hp2(或后部hp3、hp4)扬声器的滤波器。
37.为了确定前部扬声器hp1、hp2的滤波器,考虑第一频率响应rf1。
38.为了确定后部扬声器hp3、hp4的滤波器,考虑第二频率响应rf2。
39.均衡步骤120包括使用“搁架”滤波器hshelf 的第一子步骤121。滤波器hshelf的
性质取决于第一频率响应rf1(或第二频率响应rf2)和目标频率响应rf,c的音调平衡。因此,滤波器 hshelf 可以是“高架”或“低架”型,具体取决于这些曲线的音调平衡。
40.通过“音调平衡”,应将振幅曲线理解为频率的函数。
41.在任何情况下,所使用的搁架滤波器hshelf都可以使频率响应rf1(或频率响应rf2)和目标频率响应rf,c之间的偏差最小。例如,该偏差可以通过两个参数来表征:通过两条曲线之间的差的均方根计算曲线之间的距离,以及对应于所述曲线之间的差的导数的均匀性指数。
42.例如,如果频率响应 rf1(或频率响应 rf2)和目标频率响应 rf,c 之间的偏差在低频中比在高频中更显著,则低架滤波器可能是优选的。相反,高架型滤波器可能是优选的。
43.在完成使用搁架滤波器的子步骤121后,获得:-一组参数pshelf,包括例如搁架滤波器的极点频率和零点频率;
‑ꢀ
修改后的频率响应 rf1,sh,如图 3b 所示。
44.之后,均衡步骤120包括第二曲线调整子步骤122,确定带阻滤波器hnotch(“陷波滤波器”)。
45.在本发明的方法的实施方式中,带阻滤波器hnotch的数量至少与使用搁架滤波器的子步骤121时获得的频率响应曲线rf1,sh上的局部极大值一样多,每个带阻滤波器hnotch 在中心频率 fc 附近的频带上降低频率响应的振幅。
46.应该注意的是,还可以在此步骤中确定带通滤波器。尽管如此,应避免使用带通滤波器,以避免放大广播信号中包含噪声。
47.因此,与局部极大值相关联的每个频率均属于带阻滤波器hnotch之一所针对的频带。
48.在完成该曲线调整子步骤122后,获得:-带阻滤波器hnotch的一组参数pnotch,这些参数可以使前一个子步骤之后获得的频率响应rf1,sh和目标频率响应rf,c之间的偏差最小。如前所述,该偏差可以例如通过两个参数来表征:通过两条曲线之间的差的均方根计算曲线之间的距离,以及对应于所述曲线之间的差的导数的均匀性指数;
‑ꢀ
修改后的频率响应 rf1,n,如图 3c 所示。
49.例如,参数pnotch包括品质因数qnotch、增益gnotch、和中心频率fc。
50.之后,均衡步骤120包括优化子步骤123。在曲线调整子步骤122中获得的滤波器的参数可能使得一些带阻滤波器hnotch实际上几乎没有用,甚至不利于获得最优结果。
51.在优化子步骤123中,通过带阻滤波器的参数标准分类所述滤波器。
52.在一个实施方式中,这些标准是预先预定义的,也可以由操作员在该方法的这一级设置并且可以动态定义。
53.作为非限制性示例,如果滤波器的增益/品质因数对较差,即具有比阈值最大增益 g
thmax 高的显著增益和比阈值最小品质因数q
thmin
低的稍高品质因数,则可以抑制滤波器。实际上,对于与低品质因数相关的显著增益,滤波器可以相应地作用于已经由一个或多个其他滤波器控制的一个或多个频带。作为非限制性示例,阈值最大增益g
thmax
例如为7db,阈值最小品质因数q
thmin
等于2。这些阈值的值取决于均衡步骤120中的期望品质。
54.在该优化子步骤123完成后部分滤波器已被抑制的情况下,再次进行曲线调整子步骤122,然后对未被抑制的滤波器的所有参数进行重新调整。之后,再次进行优化子步骤123,直到所有使用的滤波器都与在所述优化子步骤中设置的标准高度相关。因此,曲线调整122和优化123子步骤根据需要执行多次,直到滤波器定义满足上述标准的相关组。
55.当然,在之前已经实施过带通滤波器的情况下,也可以根据类似的标准在必要时进行适当抑制。
56.返回曲线调整子步骤122的条件性质在图2中由连接优化子步骤123和曲线调整子步骤122的虚线箭头表示。
57.在一种实施方式中,测试在使用搁架滤波器的子步骤121中确定的参数pshelf,以查明所确定的搁架滤波器hshelf的性质。在这种情况下,也可以再次执行子步骤121。
58.可以认为,在确定交通工具的频率响应的步骤110中执行的测量是失真的,因为在测量期间出现了噪声信号。
59.噪声信号有各种来源。它可以由连续或准时的信号组成,并可以存在于交通工具内部或外部。例如,它可能包括风吹、关门声或导致谐波的非线性度,例如交通工具内部元件的振动,如车门的振动或扬声器的移动元件的振动。
60.这种噪声信号将一些频率的振幅修改到在确定一组频率响应的步骤110中确定的频率响应的程度。搁架滤波器应用121、曲线调整122和优化123子步骤基于测量出的频率响应 ,因此在确定滤波器时会考虑噪声信号。
61.因此,在存在噪声信号的情况下,滤波器的确定可能会失真,因为:
‑ꢀ
如果噪声信号是准时的,滤波器将通过对测量后消失的该噪声信号进行积分来起作用;
‑ꢀ
在存在连续信号或非线性度的情况下,滤波器对与噪声相关的频率的作用将受到限制甚至为零,因为所考虑的频率分量要么与交通工具的声学无关,要么与较低频率的基波产生的谐波无关。
62.因此,继续进行验证子步骤124,根据与确定频率响应的步骤110相同的原理再次测量频率响应,但同时使用在均衡步骤120的先前子步骤121、122、123中确定的滤波器对信号进行滤波。关于前部扬声器,使用从第一频率响应rf1确定的滤波器并同时进行测量。至于后部扬声器,使用从第二频率响应 rf2 确定的滤波器并同时进行测量。
63.参照图 3d,通过平均放置在前部2a(或后部2b)的所有麦克风上获得的信号,从而获得测量出的频率响应曲线rf1,n,m,并将其与从在先前子步骤期间确定的参数和理论曲线rf1,n进行比较,理论曲线rf1,n由在确定一组频率响应的步骤110中测量出的第一频率响应rf1推导出来。在两条曲线之间存在显著偏差的情况下,使用新测量出的频率响应曲线rf1,n,m,再次进行使用搁架滤波器的子步骤121、曲线调整子步骤122和优化子步骤123,以补偿误差。
64.这些子步骤再次执行的条件特性在图2中由连接验证子步骤124和使用搁架滤波器的子步骤121的虚线箭头表示。
65.测量曲线和理论曲线之间的振幅偏差的显著性可以通过预定义的标准来评估,例如,如果偏差高于或等于3 db,则可以认为偏差是显著的。这些标准也可以根据频率而变化。
66.有利地,将新测量的频率响应曲线rf1,m与在确定频率响应的步骤110中测量出的频率响应rf1进行比较,来识别滤波器作用下完全没有衰减或几乎没有衰减的潜在频率或频带;这些潜在频率或频带揭示了无法通过滤波器衰减的噪声信号(例如非线性度或外部噪声)。如果识别出这样的频率,当再次进行使用搁架滤波器的子步骤121、曲线调整子步骤122和优化子步骤123中,这些频率可以忽略。
67.如上所述,均衡步骤120分别应用于前部扬声器hp1、hp2和后部扬声器hp3、hp4,在第一种情况下考虑第一频率响应rf1,在第二种情况下考虑第二频率响应rf2。
68.在所示实施方式中,方法100包括对后部扬声器hp3、hp4进行相移步骤130。
69.由于在驾驶员座位(在此处描述的方法的实施中被认为是参考点)处每个扬声器的距离不同,当广播信号到达驾驶员座位时,各个扬声器广播的信号之间会出现相移。这些相移的缺点是由此存在在信号之间获得破坏性干扰的风险,导致驾驶员接收到的有用信号电平较低,该有用信号电平可能不足以隐藏噪声类型的信号。
70.为了避免这种情况,在相移步骤130中,通过一个或多个麦克风对后部扬声器hp3、hp4广播的信号应用延迟并测量在驾驶员座位处接收到的信号电平。
71.在优选实施方式中,针对包含在区间[0; τmax]内的延迟 τ 的离散组t进行m次测量,例如采用下式:【数学式 2】 其中[[1; m]]指介于1和m之间的所有整数。
[0072]
为了使驾驶员不会由于后部扬声器太显著的延迟而感觉到回声,最大延迟τmax不应该太显著。例如,它可以对应于声音在空气中传播1米距离所需的时间,即等于1/vs,其中vs指空气中的声速。
[0073]
在完成该相移步骤130时,保留延迟τ,可以在预先给定并由规范设置的频带上最大化能量。例如,这个频带可以对应于频带[70; 120 hz]。
[0074]
在替代实施方式中,为每个后部扬声器保留不同的延迟,使两个后部扬声器相对于驾驶员座位的各自位置。
[0075]
在所示方法100的实施的后续步骤140中,将增益g应用于由放置在前面的扬声器广播的信号,使驾驶员觉得“听觉场景”或声音的来源在前部。
[0076]
为此,在增益步骤140中进行两次测量。
[0077]
通过设置在前部的一组麦克风在前部进行第一次测量,其中设置在前部的扬声器是仅有的处于激活状态的扬声器。对四个麦克风上测量出的信号进行平均。例如,用于测量的信号是正弦扫描型时间信号。
[0078]
通过设置在后部的一组麦克风在后部进行第二次测量,其中设置在后部的扬声器是仅有的处于激活状态的扬声器。对四个麦克风上测量出的信号进行平均。例如,用于测量的信号是正弦扫描型时间信号。
[0079]
之后,确定所获得的前后平均信号之间测量出的电平之差,例如通过计算平均信号之间的声强级差。
[0080]
之后,根据注意到的差值应用增益 g,以接近可能达到的目标偏差,例如2 db。在此示例中,如果观察到1 db的电平差,则将1 db增益应用于前部扬声器中广播的信号,以获
得2 db的电平差。
[0081]
当然,目标偏差的值可能与2 db不同。
[0082]
类似地,在增益步骤140中实施的测量协议可能不同,例如,可以考虑执行这两次相同的测量,同时在每种情况下仅激活后部扬声器。
[0083]
此外,可以考虑将增益 g 应用于其他扬声器,特别是为了置换听觉场景,例如,可以将所述增益应用于放置在后部的扬声器,以获得位于交通工具后部的听觉场景的印象。
[0084]
也可以根据扬声器应用一组不同的增益。
[0085]
在方法100的后续步骤中,进行用第二均衡步骤150。该第二均衡步骤的目的是评估在所有扬声器都打开的情况下获得的信号的质量,并从频率角度对分别源自一个或多个扬声器的一个或多个信号进行干预。
[0086]
就本文中的均衡有利于带阻滤波器的程度而言,在本发明的优选实施方式中,将均衡应用于在增益步骤140中没有被增益的扬声器。因此,在前部的听觉场景的示例中,均衡后部扬声器,以保持在上一步中建立的位于交通工具前部的“听觉场景”的印象。确实,在只使用带阻滤波器的情况下,对前部扬声器进行均衡确实会导致前后电平之间的偏差减少,并因此往往会削弱位于前部的听觉场景的印象。尽管如此,可以对其他扬声器进行这种均衡,特别是使用带通滤波器的扬声器。
[0087]
为此,参照图 4,定义了第二目标频率响应rf,c',它基本上具有与目标频率响应rf,c 相似的曲线,但在低频中需要较低的振幅。低频中的这种较低振幅可以一方面补偿在相移步骤130中已放大或已出现的低频,以及补偿通过所有扬声器的叠加而放大的低频。例如,与目标频率响应rf,c相比,第二目标频率响应rf,c' 的频带范围为20 hz至200 hz,衰减g分贝,g为在上一步中应用的增益。当然,衰减的频带和/或衰减可以不同。
[0088]
第二目标频率响应rf,c'适于考虑扬声器的叠加以及相移步骤130和在频谱上增益步骤140的影响,并适于补偿放大的频率,特别是在低频中。特别地,第二目标频率响应rf,c'旨在限制后部扬声器与前部扬声器相比的能量输出(这对于前部的听觉场景是有利的,但对于被置于后部的听觉场景来说原理相同)。
[0089]
通过用所有四个扬声器hp1、hp2、hp3、hp4广播正弦扫描型信号,先确定滤波器、延迟和增益参数,再将其应用于扬声器,并通过借助于设置在驾驶员座位上的四个前部麦克风2a测量频率响应rf,确定第二目标频率响应rf,c'。将由此获得的频率响应rf与目标频率响应 rf,c 进行比较。
[0090]
例如,第二目标频率响应rf,c'可以根据以下关系定义:【数学式 3】其中f是指频率,rf是通过麦克风测量出的频率响应,s 是严格的正阈值,以分贝表示。在一种实施方式中,s等于1db。
[0091]
换言之,如果与仅由前部扬声器输出的能量相比,后部扬声器输出的能量过于显著,则目标频率响应限制后部扬声器在所考虑的频率处的贡献。
[0092]
一旦定义了第二目标频率响应rf,c',则再次进行均衡步骤120以定义新的滤波器
参数,仅限于设置后部扬声器的滤波器参数,并且需利用第二目标频率响应rf,c'。因此,均衡步骤的新的应用需基于后部麦克风2b处的新的频率响应测量,其中后部扬声器是仅有的处于激活状态的扬声器。
[0093]
仅将这一步骤应用于后部扬声器的原因是为了保持前部的听觉场景的印象。当然,如果不坚持此限制,则均衡步骤120在此也可以仅应用于前部扬声器或应用于扬声器的任何其他子集。
[0094]
因此在第二均衡步骤150中,在不同的条件下实施均衡步骤,所述不同的条件指与处于活动状态的扬声器不同或与频率响应目标不同。
[0095]
完成该方法时,由此获得一组信号处理参数,包括滤波器参数(如品质因数、增益、中心频率)、一个或多个延迟、将应用于设置在交通工具的乘客舱中的扬声器中广播的信号的增益,以获得交通工具乘客舱的频率响应,使与例如在规范中定义的目标频率响应的偏差最小。例如,该偏差可以通过两个参数来表征:通过两条曲线之间差的均方根计算的曲线之间的距离,以及对应于所述曲线之间差的导数的均匀性指数。
[0096]
所有信号处理参数的确定都是自动完成的,前提是:
‑ꢀ
已指定目标频率响应rf,c和第二目标频率响应rf,c’;
‑ꢀ
已定义在优化子步骤123中使用的标准。
[0097]
在一种实施方式中,目标频率响应rf,c 和在优化子步骤123中使用的标准在实施该方法之前定义。
[0098]
在替代实施方式中,这些参数由操作员随着该方法的进展而定义。
[0099]
当然,尽管在本文描述的整个方法中交通工具的前部是优选的,但是本领域技术人员将理解也可以实施该方法以将“听觉场景”置换到交通工具的后部或侧面。
[0100]
特别地,可以将乘客座位或交通工具乘客舱内的任何点视为参考,而不是将驾驶员座位视为参考。
[0101]
在上文描述的实施方式中,已分别考虑前部扬声器和后部扬声器。本领域技术人员将理解,在该方法的实施过程中,可以考虑扬声器的其他组合。
[0102]
例如,在确定一组频率响应的步骤110中,例如可以通过一个接一个地激活扬声器来建立一组四个频率响应。在另一种实施方式中,可以单独激活左前扬声器并将其他扬声器一起激活。在另一个实施方式中,左侧扬声器可以与右侧扬声器分开激活,偏好的听觉场景是乘客舱的左侧。
[0103]
此外,在第二均衡步骤150中也可以考虑两个不同的第二目标频率响应,以再次均衡前后部扬声器。
[0104]
本发明还涉及一种用于实施根据本发明所述的方法的设备,该设备包括:
‑ꢀ
确定给定环境的一组频率响应的装置,该给定环境包括扬声器,其中所述环境为例如交通工具乘客舱;
‑ꢀ
确定一组数字处理手段的装置,所述数字处理手段用于扬声器待广播的信号,以使环境的频率响应与环境的目标频率响应之间的偏差最小。
[0105]
确定一组频率响应的装置,尤其包括适于输出“正弦扫描”型信号的声源以及一组麦克风中的一个或多个麦克风。
[0106]
特别地,数字处理手段包括滤波器(例如“搁架”、带阻、或带通滤波器),以及使用
一个或多个增益、一个或多个延迟。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。