技术特征:
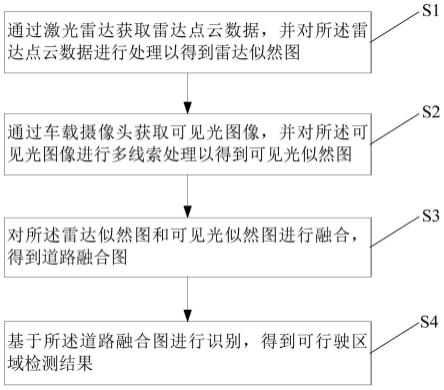
1.一种道路可行驶区域检测方法,其特征在于,该检测方法适用于多传感器多线索的融合道路检测,包括:通过激光雷达获取雷达点云数据,并对所述雷达点云数据进行处理以得到雷达似然图;通过车载摄像头获取可见光图像,并对所述可见光图像进行多线索处理以得到可见光似然图;对所述雷达似然图和可见光似然图进行融合,得到道路融合图;基于所述道路融合图进行识别,得到可行驶区域检测结果。2.如权利要求1所述的道路可行驶区域检测方法,其特征在于,得到雷达似然图具体为:通过激光雷达获取雷达点云数据;对所述雷达点云数据进行点云预处理,得到第一数据;所述点云预处理包括道路边缘区域提取处理以及地平面分割处理;对所述第一数据进行道路点云检测,得到第二数据;所述道路点云检测包括峰值强度检测及窗口搜索;对所述第二数据进行提取处理,得到车道边缘点云数据;根据所述车道边缘点云数据生成雷达似然图。3.如权利要求1所述的道路可行驶区域检测方法,其特征在于,所述可见光似然图包括道路颜色似然图、道路纹理似然图、水平线似然图及三维场景似然图中的一种或多种;其中,所述道路颜色似然图为采用颜色线索对所述可见光图像处理所得;所述道路纹理似然图为采用纹理线索对所述可见光图像处理所得;所述水平线似然图为采用水平线线索对所述可见光图像处理所得;所述三维场景似然图为采用三维场景布局线索对所述可见光图像处理所得。4.如权利要求3所述的道路可行驶区域检测方法,其特征在于,得到所述道路颜色似然图的具体过程为:基于颜色线索对所述可见光图像进行处理,得到无阴影图像,根据所述无阴影图像建立参考直方图,根据巴氏系数采用所述参考直方图遍历整张无阴影图像,得到道路颜色似然图;得到所述道路纹理似然图的具体过程为:利用滤波器确定所述可见光图像中道路边缘纹理的最大方向,对所述可见光图像进行软投票以定位得到消失点位置,根据道路边缘纹理的最大方向和消失点位置得到道路纹理似然图;得到所述水平线似然图的具体过程为:根据所述消失点的横坐标确定水平线,根据所述水平线得到水平线似然图;得到所述三维场景似然图的具体过程为:将所述可见光图像分为三个场景,并利用超像素原理得到三维场景似然图。5.如权利要求1-4任一项所述的道路可行驶区域检测方法,其特征在于,得到道路融合图的具体过程包括:基于贝叶斯融合公式对所述雷达似然图和可见光似然图进行融合,得到道路融合图;
其中,所述贝叶斯融合公式为:p(x|i)为输入图像i寻找目标位置x的概率,即为贝叶斯中的后验概率;p(x|l)为输入似然函数l寻找目标位置的x的概率,即为贝叶斯中的先验概率;p(l|i)为输入图像i中,构建似然函数l的概率,即为贝叶斯中的似然概率;p(x|l
j
)代表前述的雷达似然图和可见光似然图,w
i
为每个似然图的权重,每个似然图权重选为1/m,m为似然图的总数。6.一种道路可行驶区域检测装置,其特征在于,该检测装置适用于多传感器多线索的融合道路检测,包括:第一单元,用于通过激光雷达获取雷达点云数据,并对所述雷达点云数据进行处理以得到雷达似然图;第二单元,用于通过车载摄像头获取可见光图像,并对所述可见光图像进行多线索处理以得到可见光似然图;融合单元,用于对所述雷达似然图和可见光似然图进行融合,得到道路融合图;识别单元,用于基于所述道路融合图进行识别,得到可行驶区域检测结果。7.如权利要求6所述的道路可行驶区域检测装置,其特征在于,所述可见光似然图包括道路颜色似然图、道路纹理似然图、水平线似然图及三维场景似然图中的一种或多种;所述第二单元具体用于:基于颜色线索对所述可见光图像进行处理,得到无阴影图像,根据所述无阴影图像建立参考直方图,根据巴氏系数采用所述参考直方图遍历整张无阴影图像,得到道路颜色似然图;利用滤波器确定所述可见光图像中道路边缘纹理的最大方向,对所述可见光图像进行软投票以定位得到消失点位置,根据道路边缘纹理的最大方向和消失点位置得到道路纹理似然图;根据所述消失点的横坐标确定水平线,根据所述水平线得到水平线似然图;将所述可见光图像分为三个场景,并利用超像素原理得到三维场景似然图。8.一种计算机设备,包括处理器、输入设备、输出设备和存储器,所述处理器、输入设备、输出设备及存储器通过总线相互连接,所述存储器用于存储计算机程序,其特征在于,所述计算机程序包括程序指令,所述处理器被配置用于调用所述程序指令执行如权利要求5所述的方法。9.一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,其特征在于,所述计算机程序包括程序指令,所述程序指令被处理器执行时实现如权利要求5所述的方法。10.一种道路可行驶区域检测系统,包括相互通信的激光雷达、车载摄像头及计算机设备,其特征在于,所述计算机设备如权利要求8所述。
技术总结
本发明实施例公开了一种道路可行驶区域检测方法,包括:通过激光雷达获取雷达点云数据,并对所述雷达点云数据进行处理以得到雷达似然图;通过车载摄像头获取可见光图像,并对所述可见光图像进行多线索处理以得到可见光似然图;对所述雷达似然图和可见光似然图进行融合,得到道路融合图;基于所述道路融合图进行识别,得到可行驶区域检测结果。本发明实施例将激光雷达点云数据和车载摄像头的可见光图像进行融合,提高了道路检测的准确率,解决了单一传感器道路检测存在的无法适应复杂天气变化和场景变化、易出错等技术问题。且,本发明实施例比传统的融合检测(神经网络检测)计算更为简便。算更为简便。算更为简便。
技术研发人员:李晓威 张锦政 宾洋 金庭安 周春荣 程鹏
受保护的技术使用者:道简优行(重庆)科技有限公司 重庆金皇后新能源汽车制造有限公司
技术研发日:2022.06.02
技术公布日:2022/8/12
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。