1.本发明涉及胸腹腔微创外科手术医疗设备技术领域,具体涉及一种用于单孔胸腹腔微创手术的机器人。
背景技术:
2.微创手术具有手创口小、出血量少、恢复时间快及美容效果好等诸多优点。传统微创手术器械多为长直杆状,由医生手持,经由胸腔、腹腔或其它部位的微小创口置入,配合医用内窥镜器械在显示器画面下完成手术操作。由于微创手术往往需要夹持、切割、缝合、照明、摄像等操作,这就需要在患者体表实施多个切口,使用多个装有手术器械的机械臂协同完成手术,且同时需由主刀医生、持镜医生及其他辅助医生多人配合下进行手术操作,手术过程中,常因相互配合不协调或显示器画面中视野不合理以及手术器械运动不符合直觉操作规律等多种原因,导致手术器械的机械臂之间出现干涉等问题,进而影响手术的顺利进行。
3.近些年,单孔手术作为微创外科手术的新技术,已经得到迅速发展。传统微创腹腔镜手术在实施过程中需要在病患腹腔上开多个切口用以放置手术器械及腹腔镜,通过医生直接操作手术器械或机器人来实施手术。而单孔手术实施过程中,仅需在病患腹腔开一个切口便可进行手术,同传统微创腹腔镜手术相比,单孔手术减少了切口数量,可进一步减小手术创伤,进而减少手术麻醉和镇痛药物用量,减轻病患术后疼痛,降低伤口感染和并发症的风险,同时使术后疤痕更加美观。
4.目前,国内外单孔手术技术尚处开发初期阶段,主要实施方式是多个手术器械同时进出同一切口(截卡),手术器械运动范围很小,且手术器械容易相互干涉,医生操作空间不足,导致手术难度加大。公开号为cn102920508a的中国专利公开了《可形变单孔手术机器人装置》,该装置可在患者体内按预订路径360度滑动,但该装置仅为一概念,并无具体实施例。公开号为cn102397102a的中国专利公开了《气腹环境下的单孔手术操作平台》,以及公开号为cn102228384a的中国专利公开了《一种单孔手术通道》,这两种方案均可实现多个手术器械同时进出同一切口,但是,这两种方案都存在手术器械运动范围小且容易发生干涉的问题。公开号为cn209529333u的中国专利公开的《一种折叠式辅助微创外科单孔手术机器人》,该装置通过在两个立柱和分别与两个操作臂的一端之间通过z轴向旋转关节相连、两个操作臂和两个操作臂之间通过z轴向旋转关节相连、两个操作臂之间通过z轴向旋转关节相连、操作臂和操作臂之间通过x轴向旋转关节相连,该机器人方便拆装且机械臂调整灵活。公开号为cn109363772a的中国专利公开的《一种柔性单孔微创手术机器人》,该装置关节单元包含的两个旋转轴之间的夹角具有可调功能,关节灵活性好,柔性部分硬度高,运动灵活多变,但是该装置拆卸与安装较为繁琐,手术过程中难以快速更换不同的手术器械。公开号为cn110368091a的中国专利公开的《一种单孔腹腔手术机器人系统》,该装置外部操作机构的进给方向、转动运动机构的转轴均与末端执行机构同轴,通过外部操作机构增加了系统手术操作的自由度和灵活度,提高了体内末端执行机构的手术操作能力;末端执行机
构采用中梁沿直线配置,采用多个柔性正柱体交叉串接方式布置,实现了单自由度180度弯曲通过多自由度交叉配置,使用四根驱动丝可实现多自由度配置,大大提高了机构运动的灵活性和运动角度范围,弯曲活动角度范围大大增加。但是该装置拆卸比较麻烦,且装置体积较大。公开号为cn211049592u的中国专利公开的《一种单孔微创手术的机器人装置》,该装置通过将驱动组件模块化,使得手术器械的安拆更加方便,并能够与多种类型的微创手术器械进行适配,但是该装置没有设计机器臂安装的接口,不利于安装到机械臂上进行手术操作。公开号为cn113081280a的中国专利公开的《一种用于单孔微创手术的多臂机器人》,该装置包括柔性臂组件、柔性臂驱动组件、变向器组件和机器人支架组件,柔性臂驱动组件、变向器组件分别安装在机器人支架组件上,柔性臂驱动组件与柔性臂组件连接,柔性臂驱动组件驱动柔性臂组件进行前后运动和旋转运动,柔性臂组件穿过变向器组件后变向为相互平行,柔性臂组件的变向可缩小臂与臂的间距,减小做手术时给患者带来的创口伤害,但是该装置的体积较大,且安装与拆卸也较为繁琐。
5.鉴于微创手术存在的种类繁多、病灶部件各不相同、环境需求迥异、体内操作空间约束繁杂等问题,医院需要配备多种类型手术器械才能满足不同患者的不同手术需求。由于手术器械使用前需要通过严格的消毒处理,因此需要将手术器械与驱动装置分开,目前,现有微创手术中所使用的手术器械与驱动装置的安装与拆卸较为繁琐,操作不便。
技术实现要素:
6.为了解决现有单孔手术装置存在的手术器械运动范围小、手术器械容易相互干涉、医生操作空间不足、手术难度大的问题,本发明提供一种用于单孔胸腹腔微创手术的机器人。
7.本发明为解决技术问题所采用的技术方案如下:
8.本发明的一种用于单孔胸腹腔微创手术的机器人,包括:
9.基座;
10.安装在基座上的姿态调整臂组件,所述姿态调整臂组件包括:安装在基座上的升降臂、与升降臂上端通过转动副相连的转动臂、与转动臂通过移动副相连的伸缩臂;
11.安装在姿态调整臂组件一端的球面远心机构,所述球面远心机构包括:与伸缩臂相连的弧形臂一、安装在弧形臂一下端的弧形臂二、安装在弧形臂二下端的支座、安装在支座下端的多个直线模组;
12.安装在球面远心机构下端的手术器械组件。
13.进一步的,所述基座包括:底座、安装在底座下端的四个脚轮、安装在底座上端的立柱;所述立柱内壁设有升降滑轨;所述升降臂安装在立柱上。
14.进一步的,所述升降臂包括:安装在立柱上且通过转动副与转动臂相连的升降臂本体、设置在升降臂本体下端的升降滑块、固定在转动臂本体上且与升降滑块相配合的伸缩滑轨、安装在底座中且与升降臂本体底端相连的升降伸缩电动缸。
15.进一步的,所述转动臂包括:关节电机一、与关节电机一输出端相连的关节输出轴一、与关节输出轴一上端相连的转动臂本体、通过轴承一套装在关节输出轴一上的轴套一;所述轴套一外壁与升降臂本体相连。
16.进一步的,所述伸缩臂包括:安装在转动臂本体上的伸缩电动缸、与伸缩电动缸输
出端相连的伸缩臂本体、设置在伸缩臂本体左端的伸缩滑块、固定在转动臂本体上且与伸缩滑块相配合的伸缩滑轨。
17.进一步的,所述弧形臂一包括:关节电机二、与关节电机二输出端相连的关节输出轴二、与关节输出轴二相连的弧形臂一本体、均套装在关节输出轴二上的轴套二和轴承二;所述轴套二和轴承二均与伸缩臂本体右端内壁相连。
18.进一步的,所述弧形臂二包括:关节电机三、与关节电机三输出端相连的关节输出轴三、与关节输出轴三相连的弧形臂二本体、均套装在关节输出轴三上的轴套三和轴承三;所述轴套三和轴承三均与弧形臂一本体左端相连;所述关节输出轴二中心轴线与关节输出轴三中心轴线相交于一点,该点为球面远心机构的远心点,远心点与手术切口位置相重合。
19.进一步的,所述支座包括:关节电机四、安装在弧形臂二本体上且与关节电机四输出端相连的支座本体、均套装在关节电机四输出轴上的轴套四和轴承四;所述轴套四两端分别与轴承四外壁和弧形臂二本体内壁相连。
20.进一步的,所述直线模组包括:与支座本体内壁相连的直线模组本体、安装在直线模组本体上端的电机、滚珠丝杠副、安装在滚珠丝杠副的丝母上的直线滑块;所述滚珠丝杠副的丝杠两端分别与电机输出端和直线模组本体下端相连。
21.进一步的,所述手术器械组件包括:与弧形臂二本体和直线滑块相连的戳卡,均安装在戳卡下端的手术器械和内窥镜器械;所述戳卡上端与球面远心机构的远心点重合。
22.本发明的有益效果是:
23.本发明的一种用于单孔胸腹腔微创手术的机器人,主要包括:基座、姿态调整臂组件、球面远心机构和手术器械组件。与现有技术相比,本发明具有以下优点:
24.1、本发明中,手术器械组件与基座、姿态调整臂组件、球面远心机构进行集成一体化设计,并且姿态调整臂组件为多自由度调整机构,采用手术器械组件进行手术时可以保留一个相对较大的切口,避免了手术过程中多机械譬运动干涉的问题。
25.2、本发明采用球面远心机构,远心点便于确定,远心运动便于实现。
26.3、本发明中,球面远心机构的进给方向以及转动方向均与手术器械组件的末端执行机构同轴,通过球面远心机构增加了手术操作的自由度和灵活度,提高了体内手术器械组件末端执行机构的手术操作能力,降低了手术难度。
27.4、本发明中,手术器械组件安装在直线模组上,使手术器械组件与机器人的其他部件之间保持独立,使整个机器人实现了模块化,从而使驱动更加灵活、整体更加轻量化。此外,方便单个手术器械组件的拆卸与更换,提高了机器人的兼容性,扩大了机器人的适用范围。
28.5、本发明的一种用于单孔胸腹腔微创手术的机器人,结构紧凑,远心点便于确定,远心运动便于实现,操作灵活方便,且方便快速拆卸与安装不同类型的手术器械组件。
附图说明
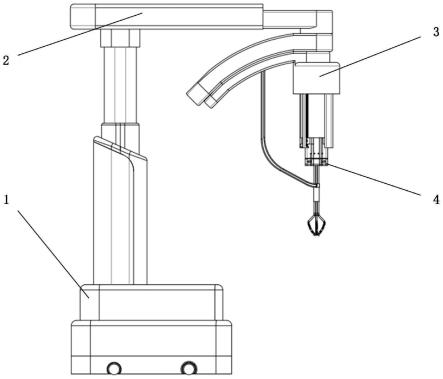
29.图1为本发明的一种用于单孔胸腹腔微创手术的机器人的整体结构示意图。
30.图2为基座的爆炸示意图。
31.图3为姿态调整臂组件的结构示意图。
32.图4为升降臂的结构示意图。
3-3和伸缩电动缸2-3-4;伸缩滑块2-3-3的数量为3个,3个伸缩滑块2-3-3分别设置在伸缩臂本体2-3-1左端的3个侧面上,伸缩滑轨2-3-2的数量为3个,3个伸缩滑轨2-3-2外表面均固定在转动臂2-2的转动臂本体2-2-1上,3个伸缩滑轨2-3-2内表面分别对应安装在3个伸缩滑块2-3-3上,伸缩滑轨2-3-2与伸缩滑块2-3-3相配合,伸缩滑块2-3-3可在伸缩滑轨2-3-2上滑动;伸缩电动缸2-3-4安装在转动臂2-2的转动臂本体2-2-1上,伸缩电动缸2-3-4输出端与伸缩臂本体2-3-1左端端部相连,通过伸缩电动缸2-3-4可驱动伸缩臂本体2-3-1进行伸缩。
52.为实现对手术器械4-2和内窥镜器械4-3的定位,从而使手术器械4-2和内窥镜器械4-3到达手术切口位置,本发明的姿态调整臂组件2具有三个自由度,这三个自由度分别为升降臂2-1的移动自由度p1,转动臂2-2的转动自由度r1和伸缩臂2-3的移动自由度p2。姿态调整臂组件2的三个自由度的运动可保证远心点c到达手术所需空间范围的任意位置。
53.如图7所示,球面远心机构3主要包括:弧形臂一3-1、弧形臂二3-2、支座3-3和直线模组3-4;若干个直线模组3-4均安装在支座3-3下端,弧形臂二3-2安装在支座3-3上端,弧形臂一3-1安装在弧形臂二3-2上;弧形臂一3-1与伸缩臂2-3的伸缩臂本体2-3-1右端相连。
54.如图8所示,弧形臂一3-1主要包括:弧形臂一本体3-1-1、关节电机二3-1-2、轴套二3-1-3、关节输出轴二3-1-4和轴承二3-1-5;关节电机二3-1-2输出端与关节输出轴二3-1-4上端下相连,关节输出轴二3-1-4下端端部与弧形臂一本体3-1-1右端相连,轴套二3-1-3和轴承二3-1-5均套装在关节输出轴二3-1-4上,轴套二3-1-3和轴承二3-1-5外壁均与伸缩臂2-3的伸缩臂本体2-3-1右端内壁相连。通过关节电机二3-1-2可驱动弧形臂一本体3-1-1进行转动。
55.如图9所示,弧形臂二3-2主要包括:弧形臂二本体3-2-1、关节电机三3-2-2、轴套三3-2-3、关节输出轴三3-2-4和轴承三3-2-5;关节电机三3-2-2输出端与关节输出轴三3-2-4上端相连,关节输出轴三3-2-4下端端部与弧形臂二本体3-2-1左端相连,轴套三3-2-3和轴承三3-2-5均套装在关节输出轴三3-2-4上,轴套三3-2-3和轴承三3-2-5外壁均与弧形臂一3-1的弧形臂一本体3-1-1左端相连。通过关节电机三3-2-2可驱动弧形臂二本体3-2-1进行转动。
56.如图10所示,支座3-3主要包括:支座本体3-3-1、关节电机四3-3-2、轴套四3-3-3和轴承四3-3-4;支座本体3-3-1安装在弧形臂二3-2的弧形臂二本体3-2-1上,关节电机四3-3-2输出端与支座本体3-3-1上端相连,轴套四3-3-3和轴承四3-3-4均套装在关节电机四3-3-2输出轴上,轴套四3-3-3下端与轴承四3-3-4外壁相连,轴套四3-3-3上端与弧形臂二3-2的弧形臂二本体3-2-1内壁相连。通过关节电机四3-3-2可驱动支座本体3-3-1进行转动。
57.如图11所示,直线模组3-4主要包括:直线模组本体3-4-1、电机3-4-2、滚珠丝杠副3-4-3和直线滑块3-4-4;直线模组本体3-4-1上端外壁与支座3-3的支座本体3-3-1内壁相连,电机3-4-2安装在直线模组本体3-4-1上端,滚珠丝杠副3-4-3的丝杠上端与电机3-4-2输出端相连,滚珠丝杠副3-4-3的丝杠下端安装在直线模组本体3-4-1下端,直线滑块3-4-4安装在滚珠丝杠副3-4-3的丝母上。通过电机3-4-2驱动滚珠丝杠副3-4-3的丝杠转动同时带动直线滑块3-4-4上下移动。
58.球面远心机构3中,关节输出轴二3-1-4的中心轴线与关节输出轴三3-2-4的中心
轴线相交于一点,该点为球面远心机构3的远心点c,远心点c与手术切口位置相重合。
59.如图12所示,手术器械组件4安装在直线模组3-4上,使手术器械组件4与机器人中的其他部件保持相对独立,在手术过程中方便手术器械组件4中的单个器械的拆卸与更换。手术器械组件4主要包括:单孔手术用的戳卡4-1、手术器械4-2和内窥镜器械4-3;戳卡4-1中间与弧形臂二3-2的弧形臂二本体3-2-1相连,戳卡4-1上端外壁与直线模组3-4的直线滑块3-4-4相连,戳卡4-1上端与球面远心机构3的远心点c重合;手术器械4-2和内窥镜器械4-3均安装在戳卡4-1下端。直线模组3-4、手术器械4-2和内窥镜器械4-3随着支座本体3-3-1的转动而转动,从而实现手术器械组件4绕自身轴线旋转的转动自由度运动;同时,直线模组3-4在电机3-4-2的驱动下能够通过内部丝杠螺母副的方式实现伸长和缩短,进而带动安装在直线滑块3-4-4上的手术器械组件4实现伸长或缩短,从而快速地调整手术器械4-2和内窥镜器械4-3的位置,手术器械4-2和内窥镜器械4-3的末端执行器经由戳卡4-1进入胸腹腔,从而完成器械末端在胸腹腔的探入和探出运动。
60.本发明的一种用于单孔胸腹腔微创手术的机器人,其工作过程如下:
61.给整个机器人供电后,启动升降伸缩电动缸2-1-3驱动升降臂2-1升降,从而带动动臂2-2、伸缩臂2-3、球面远心机构3、手术器械4-2和内窥镜器械4-3进行升降,到达指定位置后停止运动,完成姿态调整臂组件2在竖直方向初步定位过程;启动关节电机一2-2-2驱动转动臂本体2-2-1进行旋转,同时启动伸缩电动缸2-3-4驱动伸缩臂本体2-3-1进行伸缩,实现转动臂2-2和伸缩臂2-3在水平方向的定位,从而使球面远心机构3的远心点c到达手术切口位置;启动关节电机二3-1-2驱动弧形臂一本体3-1-1进行转动,启动关节电机三3-2-2驱动弧形臂二本体3-2-1进行转动,从而带动弧形臂一3-1和弧形臂二3-2进行旋转,可调整手术器械4-2和内窥镜器械4-3自身轴线与手术切口轴线的角度位置,调整到手术所需位置后,启动直线模组3-4驱动内窥镜器械4-3,使内窥镜器械4-3沿着戳卡4-1轴线从手术切口探入胸腹腔,内窥镜器械4-3获得清晰的视野后,启动直线模组3-4驱动手术器械4-2沿着戳卡4-1轴线从手术切口探入胸腹腔,进而在内窥镜器械的视野下进行手术。
62.在本发明的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为便于描述本发明和简化描述,而不是指示或暗指所指的装置或元件必须具有特定的方位、为特定的方位构造和操作,因而不能理解为对本发明保护内容的限制。
63.最后应说明的是:以上实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换,但这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的精神和范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。