一种穿戴式外骨骼装置及其控制方法
【技术领域】
1.本技术涉及下肢康复助行设备技术领域,尤其涉及一种穿戴式外骨骼装置及其控制方法。
背景技术:
2.随着社会的发展,下肢瘫痪病人的逐渐得到社会的关注,他们对康复助行设备的需求越发迫切。下肢康复训练机械装置作为治疗并解决日常活动的机械设备在这种条件下迅速发展。目前市场上的仿生腿控制不够精细,舒适度不高。
技术实现要素:
3.本技术的目的在于提供一种穿戴式外骨骼装置及其控制方法,控制精细,舒适度高。
4.本技术提供了一种穿戴式外骨骼装置的控制方法,其特征在于,包括以下步骤:
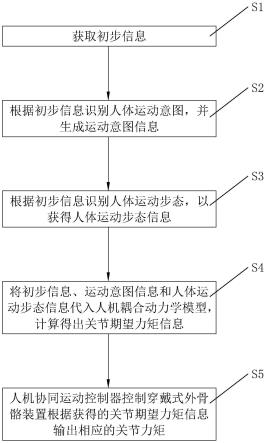
5.s1:获取初步信息,其中初步信息包括从穿戴式外骨骼装置上获取的外骨骼状态信息;
6.s2:根据初步信息识别人体运动意图,并生成运动意图信息;
7.s3:根据初步信息识别人体运动步态,以获得人体运动步态信息,其中所述人体运动步态信息包括站立相和摆动相;
8.s4:将初步信息、运动意图信息和人体运动步态信息代入人机耦合动力学模型,计算得出关节期望力矩信息;
9.s5:人机协同运动控制器控制穿戴式外骨骼装置根据获得的关节期望力矩信息输出相应的关节力矩。
10.进一步地,在步骤s4中,还包括以下步骤:
11.s401:获取调整信息,其中误差信息包括通过扰动观测器获取的扰动信息、误差信息以及人机交互力信息;
12.s402:将调整信息输入机器学习网络中,并通过机器学习网络输出优化关节期望力矩信息至人机协同运动控制器中,使穿戴式外骨骼装置根据获得的优化关节期望力矩信息输出相应的关节力矩。
13.进一步地,在步骤s1中,还包括以下步骤:
14.s101:获取初步信息,其中初步信息包括从穿戴式外骨骼装置上获取的外骨骼状态信息;外骨骼状态信息包括从穿戴式外骨骼装置上的摄像头获取的视觉信息和传感器获取的力触觉信息;
15.s102:对视觉信息和力触觉信息进行多模信息融合处理后进入步骤s2。
16.进一步地,在步骤s4中,还包括以下步骤:
17.s411:获取安全信息,其中安全信息包括零力矩点信息及系统压力中心信息;
18.s412:将安全信息输入人机耦合动力学模型。
19.进一步地,在步骤s1中,所述初步信息还包括从人机交互界面系统上获取的人机交互信息,人机交互信息包括语言辨识信息、视觉环境辨识信息以及康复训练模式信息。
20.进一步地,所述人机耦合动力学模型包括人机交互阻抗力学模型和关节力矩模型,人机协同运动控制器包括伺服控制系统;
21.外骨骼状态信息输入人机交互阻抗力学模型后,输出结果至关节力矩模型中,关节力矩模型输出关节期望力矩信息至伺服控制系统,使得在人机协同运动控制器输出相应的关节力矩后,
22.人机交互阻抗力学模型从穿戴式外骨骼装置上获取目标力矩,并使目标力矩与关节力矩对应。
23.进一步地,所述人机耦合动力学模型包括动力学逆解模型,所述动力学逆解模型根据当前各个关节位置,速度以及加速度,计算出当前关节对应的力矩,并与关节交互力矩模型输出的结果共同构成关节期望的力矩。
24.本技术还提供了一种穿戴式外骨骼装置,包括腰部支撑部、腿支撑部、环境信息收集系统、中央处理系统及人机协同运动控制器,所述腿支撑部包括大腿支撑部、小腿支撑部及脚掌支撑部,所述腰部支撑部与所述大腿支撑部通过髋关节转动部连接,所述大腿支撑部与所述小腿支撑部通过膝关节转动部连接,所述髋关节转动部和/或所述膝关节转动部内设有减速器,所述减速器,用于限制所述腰部支撑部与所述大腿支撑部的相对转动速度;或限制所述大腿支撑部与所述小腿支撑部的相对转动速度。
25.进一步地,所述减速器包括太阳轮固定架和减速器连接架,所述太阳轮固定架的中部设有太阳轮,所述太阳轮固定架上设有行星架,所述行星架上设有行星轮,所述行星轮和所述太阳轮啮合,所述太阳轮中部设有弹性件,弹性件用于提供阻碍所述太阳轮旋转的阻力;
26.所述太阳轮固定架与所述腰部支撑部连接,所述减速器连接架与所述大腿支撑部连接;或所述太阳轮固定架与所述大腿支撑部连接,所述减速器连接架与所述小腿支撑部连接。
27.进一步地,所述弹性件与所述太阳轮过盈连接。
28.与现有技术相比,本技术有如下优点:
29.通过环境信息收集系统收集人体周围的环境信息;所述传感器包括用于采集环境信息的视觉传感器及采集力触觉信息的力触觉传感器;中央处理系统对环境信息进行多模信息融合处理;中央处理系统识别人体运动意图;中央处理系统获取人体运动步态;所述人体运动步态包括站立相和摆动相;中央处理系统通过人机耦合动力学模型计算得出关节期望力矩;中央处理系统通过人机协同运动控制器控制穿戴式外骨骼装置的所述髋关节转动部及所述膝关节转动部提供相应的关节期望力矩,辅助人体运动;提高系统柔顺控制效果;同时还提供了康复训练模式,康复训练模式提供多级别的关节期望力矩控制方式供客户选择,有助于提高用户的恢复效率。
【附图说明】
30.图1为穿戴式外骨骼装置的控制方法的流程图。
31.图2为本技术穿戴式外骨骼装置的示意图。
32.图3为本技术穿戴式外骨骼装置的示意图。
33.图4为本技术减速器的俯视图。
34.图5为本技术太阳轮固定架的示意图。
35.图6为本技术脚踝调节部的爆炸图。
36.图7为本技术脚踝调节部的示意图。
【具体实施方式】
37.为让本技术的上述特征和优点能更明显易懂,下文特举实施例,并配合附图,作详细说明如下,但本技术并不限于此。
38.如图1所示,一种穿戴式外骨骼装置的控制方法,包括以下步骤:
39.s1:获取初步信息,其中初步信息包括从穿戴式外骨骼装置上获取的外骨骼状态信息;
40.s2:根据初步信息识别人体运动意图,并生成运动意图信息;
41.s3:根据初步信息识别人体运动步态,以获得人体运动步态信息,其中所述人体运动步态信息包括站立相和摆动相;
42.s4:将初步信息、运动意图信息和人体运动步态信息代入人机耦合动力学模型,计算得出关节期望力矩信息;
43.s5:人机协同运动控制器控制穿戴式外骨骼装置根据获得的关节期望力矩信息输出相应的关节力矩。进行辅助人体运动;提高系统柔顺控制效果。
44.在步骤s4中,还包括以下步骤:
45.s401:获取调整信息,其中误差信息包括通过扰动观测器获取的扰动信息、误差信息以及人机交互力信息;
46.s402:将调整信息输入机器学习网络中,并通过机器学习网络输出优化关节期望力矩信息至人机协同运动控制器中,使穿戴式外骨骼装置根据获得的优化关节期望力矩信息输出相应的关节力矩。通过扰动观测器测量扰动误差数据,并将所述扰动误差数据提供给所述人机协同运动控制器计算。扰动观测器能够实时检测由于一些不确定性因素而造成的人体与外骨骼之间的人机交互力、位误差,将人机交互力、位误差反馈给人机协同运动控制器从而提高运动的稳定性。
47.在步骤s1中,还包括以下步骤:
48.s101:获取初步信息,其中初步信息包括从穿戴式外骨骼装置上获取的外骨骼状态信息;外骨骼状态信息包括从穿戴式外骨骼装置上的摄像头获取的视觉信息和传感器获取的力触觉信息;
49.s102:对视觉信息和力触觉信息进行多模信息融合处理后进入步骤s2。结果更加准确。
50.在步骤s4中,还包括以下步骤:
51.s411:获取安全信息,其中安全信息包括零力矩点信息及系统压力中心信息;
52.s412:将安全信息输入人机耦合动力学模型。
53.在步骤s1中,所述初步信息还包括从人机交互界面系统上获取的人机交互信息,人机交互信息包括语言辨识信息、视觉环境辨识信息以及康复训练模式信息。
54.所述人机耦合动力学模型包括人机交互阻抗力学模型和关节力矩模型,人机协同运动控制器包括伺服控制系统;
55.外骨骼状态信息输入人机交互阻抗力学模型后,输出结果至关节力矩模型中,关节力矩模型输出关节期望力矩信息至伺服控制系统,使得在人机协同运动控制器输出相应的关节力矩后,
56.人机交互阻抗力学模型从穿戴式外骨骼装置上获取目标力矩,并使目标力矩与关节力矩对应。
57.所述人机耦合动力学模型包括动力学逆解模型,所述动力学逆解模型根据当前各个关节位置,速度以及加速度,计算出当前关节对应的力矩,并与关节交互力矩模型输出的结果共同构成关节期望的力矩。
58.如图2-7所示,一种穿戴式外骨骼装置,包括腰部支撑部1、主腿支撑部2、环境信息收集系统、中央处理系统及人机协同运动控制器,所述主腿支撑部2包括大腿支撑部21、小腿支撑部22及脚掌支撑部23,所述腰部支撑部1与所述大腿支撑部21通过髋关节转动部3连接,所述大腿支撑部21与所述小腿支撑部22通过膝关节转动部4连接,所述髋关节转动部3及所述膝关节转动部4输出中央处理系统提供的关节期望力矩。
59.所述髋关节转动部3和/或所述膝关节转动部4内设有减速器5,所述减速器5,用于限制所述腰部支撑部1与所述大腿支撑部21的相对转动速度;或限制所述大腿支撑部21与所述小腿支撑部22的相对转动速度。以提高减速、缓冲效果。
60.所述减速器5包括太阳轮固定架51和减速器连接架55,所述太阳轮固定架51的中部设有太阳轮52,所述太阳轮固定架51上设有行星架53,所述行星架53上设有行星轮54,所述行星轮54和所述太阳轮52啮合,所述太阳轮52中部设有弹性件6,弹性件6用于提供阻碍所述太阳轮52旋转的阻力;所述太阳轮固定架51与所述腰部支撑部1连接,所述减速器连接架55与所述大腿支撑部21连接;或所述太阳轮固定架51与所述大腿支撑部21连接,所述减速器连接架55与所述小腿支撑部22连接。利用弹性件6扭转产生的扭转力来进一步提高减速、缓冲效果。
61.所述弹性件6与所述太阳轮52过盈连接。所述弹性件6与所述太阳轮固定架51固定连接,通过所述弹性件6与所述太阳轮52过盈连接,有效利用所述弹性件6产生的扭转力,且结构简单,便于加工。
62.所述弹性件6在朝向所述太阳轮52的一侧上设有螺纹。可以进一步提高所述弹性件6与所述太阳轮52之间的相互作用力,进一步提高减速、缓冲效果。
63.所述减速器连接架55上设有位于所述行星轮54外侧的内齿轮551,所述行星轮54与所述内齿轮551啮合。进一步提高减速、缓冲效果。
64.所述小腿支撑部22与所述脚掌支撑部23之间设有用于保持脚掌与地面倾斜度的脚踝调节部7。使得脚掌可以保持更自然、更舒适的位置。
65.所述脚踝调节部7包括脚踝调节板71,所述脚掌支撑部23上设有脚部支架72,所述脚踝调节板71与所述脚部支架72铰接。铰接连接方便调整方向。
66.所述脚踝调节板71与所述脚部支架72间设有万向球头铰链73,所述万向球头铰链73包括与所述脚踝调节板71连接的万向球头第一连接部731、与所述万向球头第一连接部731连接的万向球头第二连接部732及与所述万向球头第二连接部732连接的万向球头连接
部733,所述万向球头连接部733可在所述万向球头第二连接部732的万向球头空腔7321内转动,所述脚踝调节板71上还设有铰链盖75。使得脚掌可以多方向的转动,更适合人体且更加稳定。
67.所述脚踝调节板71与所述脚部支架72间设有扭簧74。可以调节脚掌的方向,结构简单,成本低。
68.所述脚掌支撑部23上设有用于固定的鞋帮231。方便固定脚掌或鞋。
69.工作时通过环境信息收集系统收集人体周围的环境信息;所述传感器包括用于采集环境信息的视觉传感器及采集力触觉信息的力触觉传感器;
70.中央处理系统对环境信息进行多模信息融合处理;
71.中央处理系统识别人体运动意图;
72.中央处理系统获取人体运动步态;所述人体运动步态包括站立相和摆动相;
73.中央处理系统通过人机耦合动力学模型计算得出关节期望力矩;
74.中央处理系统通过人机协同运动控制器控制穿戴式外骨骼装置的所述髋关节转动部3及所述膝关节转动部4提供相应的关节期望力矩。进行辅助人体运动;提高系统柔顺控制效果。
75.通过所述髋关节转动部3及所述膝关节转动部4中设置的减速器5提高减速、缓冲效果;减速器5中的弹性件6提供扭转力,能够提供更高的缓冲性能,具有更好的减速、缓冲效果;同时通过所述脚踝调节部7来调节脚掌与地面倾斜度,使得人使用穿戴式外骨骼装置进行走路时,更符合人体的动作,更加的舒适。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
