一种基于4d毫米波雷达的涉水路段危险预警系统
技术领域
1.本实用新型涉及车身涉水检测技术领域,具体涉及一种基于4d毫米波雷达的涉水路段危险预警系统。
背景技术:
2.目前已有技术均为在自车上安装传感器进行前方液面高度探测,通过获取车身倾斜角以及前方探测的目标距离获取液面深度。
3.专利cn 112937486 a技术方案的输入设备为两个摄像头(同时采集两个带有激光点的图案)、车身倾角传感器(获取拍照瞬间车身倾角)、超声波雷达(获取拍照瞬间汽车所在位置水深)和辅助涉水按键(控制辅助驾驶功能是否启动),通过控制单元的信息处理进而对司机进行扬声器、显示屏提示并在必要时辅助控制车速。
4.专利cn 107991669 a技术方案主要为车辆涉水时,获取雷达发送的测距信号,同时获取车辆倾角信息(螺旋仪传感器)和车辆入水深度信息(水深传感器)进而确定路面上至少一个目标点处的水深。
5.现有技术有以下缺点:
6.1、成本非常高,需配备车用倾角传感器进行辅助计算,且用于抓取路况的两个摄像头成本高昂。
7.2、前方涉水检测功能无法实现全车辆覆盖,这取决于各个车企车辆的设备安装情况。由于覆盖面不够广,仍会有一部分车辆无法检测前方危险信息从而导致危险事故的发生。且现有技术大部分建立在车身已涉水的情况下进行当前水深检测以及前方水深检测,具有一定局限性。
技术实现要素:
8.本实用新型的目的是针对现有技术存在的不足,提供一种基于4d毫米波雷达的涉水路段危险预警系统。
9.为实现上述目的,本实用新型提供了一种基于4d毫米波雷达的涉水路段危险预警系统,包括雷达场端和与雷达场端连接的路端指示牌,所述雷达场端包括探测部件,所述探测部件用以探测积水深度信息,且其与第一处理器连接,所述第一处理器连接有第一供电单元和第一通信模块,所述供电单元与探测部件、第一处理器和第一通信模块分别连接,所述第一处理器控制第一通信模块将积水深度信息发送路端指示牌,所述路端指示牌包括第二通信模块和与第二通信模块连接的第二处理器,所述第二处理器控制第二通信模块接收第一通信模块发出的积水深度信息,所述第二处理器与显示牌控制模块和第二供电单元分别连接,所述显示牌控制模块和第二供电单元分别与显示牌连接,所述显示牌用以显示积水深度信息。
10.进一步的,所述雷达场端还包括雨量传感器,所述雨量传感器与第一处理器和第一供电单元分别连接,所述第一供电单元与探测部件之间连接有开关器件,所述开关器件
与第一处理器连接。
11.进一步的,所述显示牌为led显示牌。
12.进一步的,所述第二处理器还用以判断积水深度信息是否在设定的深度阈值以上,若在设定的深度阈值以上,所述第二处理器还控制显示牌显示不建议通行。
13.进一步的,所述深度阈值为30cm。
14.进一步的,所述第一处理器和第二处理器均为mcu。
15.进一步的,所述第一通信模块和第二通信模块均为蓝牙模块或zigbee模块。
16.进一步的,所述探测部件包括4d毫米波雷达模块。
17.进一步的,所述4d毫米波雷达模块通过can模块或网口模块与第一处理器连接。
18.进一步的,所述开关器件包括继电器。
19.有益效果:1、相较于其他传感器而言,毫米波雷达自身优势明显,不仅可以在恶劣天气如雨、雪、雾天下正常工作,且可大大降低成本。
20.2、无需在每个车辆上安装具有涉水检测功能的毫米波雷达,而是着眼于建设智慧道路,在道路端建设监测设备,不仅覆盖率大大增加,也更大程度上为车路协同做出贡献。
21.3、避免车身涉水,及时提醒司机提前更换其他路线行驶。
22.4、利用4d毫米波雷达同时具备水平和俯仰方向上的大角度、高精度探测的优势,能准确探测全路面的积水深度,精准识别积水最深位置,提高预警判断的准确性。
附图说明
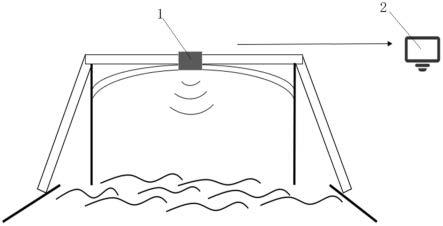
23.图1是基于4d毫米波雷达的涉水路段危险预警系统结构示意图;
24.图2是本实用新型实施例的雷达场端的原理框图;
25.图3是本实用新型实施例的路端指示牌的原理框图。
具体实施方式
26.下面结合附图和具体实施例,进一步阐明本实用新型,本实施例在以本实用新型技术方案为前提下进行实施,应理解这些实施例仅用于说明本实用新型而不用于限制本实用新型的范围。
27.如图1至图3所示,本实用新型实施例提供了一种基于4d毫米波雷达的涉水路段危险预警系统,包括雷达场端1和路端指示牌2,雷达场端1与路端指示牌2连接。其中,雷达场端1设置在容易积水路段,路端指示牌2可以设置在容易积水路段的一侧。雷达场端1包括探测部件11,探测部件11用以探测积水深度信息,且其与第一处理器12连接,第一处理器12连接有第一供电单元13和第一通信模块14,第一供电单元13与探测部件11、第一处理器12和第一通信模块14分别连接,以分别向其供电。探测部件11优选采用4d毫米波雷达模块,但不限于此,也可采用如摄像头、液位计等实现积水深度检测。4d毫米波雷达模块可以通过can模块17与第一处理器12连接,也可以采用网口模块与第一处理器12连接。第一供电单元13可以采用第一12v电源131和与第一12v电源131连接的第一电源模块132,第一12v电源131可以是电源适配器或蓄电池等,第一12v电源131与4d毫米波雷达模块连接,向其提供直流12v的工作电压,第一电源模块132用来将直流12v电压转化成直流5v电压,第一电源模块132向第一处理器12和第一通信模块14提供直流5v工作电压。
28.第一处理器12用以控制第一通信模块14将积水深度信息发送路端指示牌2。
29.本实用新型实施例的路端指示牌2包括第二通信模块21和第二处理器22,第二通信模块21与第二处理器22连接,第二处理器22用来控制第二通信模块21接收第一通信模块14发出的积水深度信息,第二处理器22与显示牌控制模块23和第二供电单元24分别连接,显示牌控制模块23和第二供电单元24分别与显示牌25连接,第二处理器22将积水深度信息发送至显示牌控制模块23,由显示牌控制模块23控制显示牌25显示积水深度信息,优选控制显示牌25仅显示最深的积水深度信息。显示牌25优选采用led显示牌,如p10led显示牌。第二供电单元24可以采用第二12v电源241和与第二12v电源241连接的第二电源模块242,第二12v电源241也可以是电源适配器或蓄电池等,第二12v电源241与显示牌25连接,以向显示牌25提供直流12v工作电压。第二电源模块242用来将直流12v电压转化成直流5v电压,并提供至第二通信模块21、第二处理器22和显示牌控制模块23。第一处理器和第二处理器均优选采用mcu,如型号为fs32r294kak0mjdr的mcu。显示牌控制模块23的型号优选为bx-6m1。第一通信模块14和第二通信模块21可以采用蓝牙模块,如型号为zx-d30的蓝牙模块,也可以采用zigbee模块。第一电源模块132和第二电源模块242的型号优选为tps54240。
30.为了实现节能,本实用新型实施例的雷达场端1还包括雨量传感器15,雨量传感器15的型号优选为rs200,雨量传感器15与第一处理器12和第一供电单元13分别连接,第一供电单元13与探测部件11之间连接有开关器件16,开关器件16与第一处理器12连接。开关器件16可以采用继电器,具体的,继电器的常开触点连接在第一供电单元13与探测部件11之间,继电器的线圈与第一处理器12连接。当雨量传感器15检测到下雨时,将信号反馈至第一处理器12,第一处理器12控制继电器得电,继电器的常开触点闭合,使第一供电单元13对探测部件11供电工作,可以根据需要设置一个三极管来驱动继电器工作。需要说明的是,可以通过第一处理器12设置停止测量深度阈值,停止测量深度阈值可以是3-5cm,当积水深度信息低于停止测量深度阈值时,第一处理器12控制控制继电器断开。
31.为了便于司机可以清楚的判断积水区域能否通行,还以通过第二处理器22设置深度阈值,该深度阈值优选为30cm。第二处理器22在接收到积水深度信息后,还判断当前积水深度信息是否在设定的深度阈值以上,若在设定的深度阈值以上,第二处理器22还控制显示牌25显示不建议通行。另外,若当前积水深度信息在低于设定的深度阈值时,也可控制显示牌25显示正常通行。
32.以上所述仅是本实用新型的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,其它未具体描述的部分,属于现有技术或公知常识。在不脱离本实用新型原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视为本实用新型的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
