技术特征:
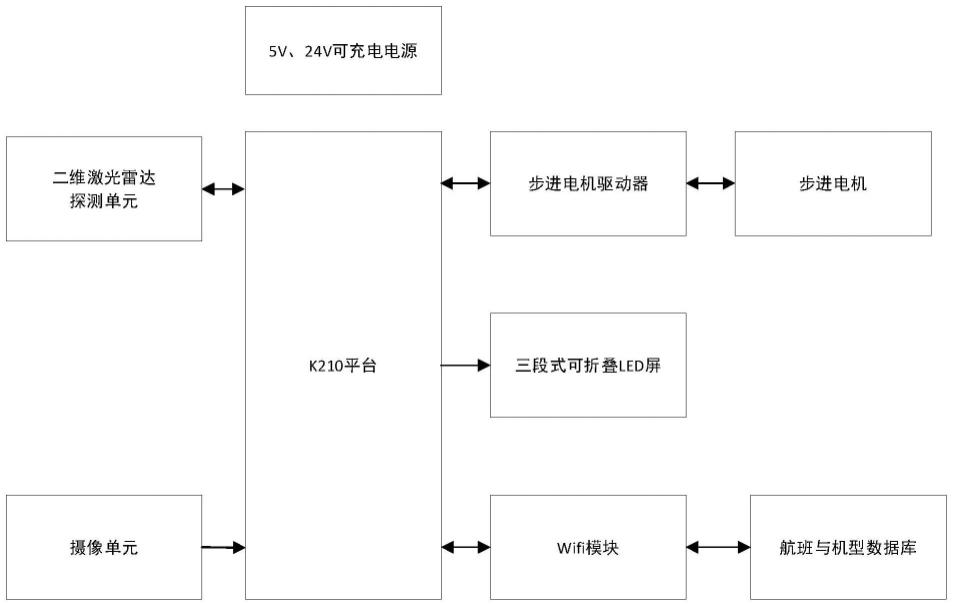
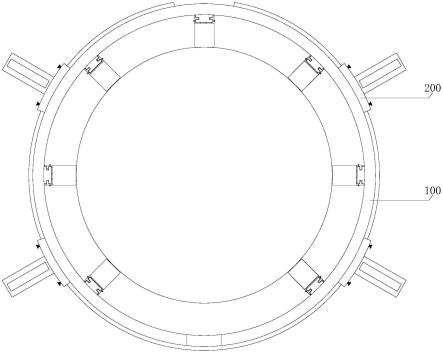
1.一种便携式飞机泊位自动引导装置,其特征在于,包括:支座、微控制器、二维激光雷达探测单元、运动单元、三段式led屏以及摄像单元;所述微控制器与所述二维激光雷达探测单元、所述运动单元、所述三段式led屏以及所述摄像单元均相连;所述微控制器获取所述摄像单元采集的图像;所述摄像单元安装于所述三段式led屏顶部;所述三段式led屏安装于所述运动单元上方;所述支座底部设有凸台,所述运动单元安装于所述支座底部,所述运动单元输出轴连有光杆,所述支座底部的凸台上部设有光杆槽以使所述光杆位于所述光杆槽内部,所述二维激光雷达探测单元通过运动转换机构实现在光杆的上下运动。2.根据权利要求1所述的便携式飞机泊位自动引导装置,其特征在于,所述运动单元包括步进电机、步进电机驱动器;所述步进电机通过所述步进电机驱动器与所述微控制器相连,所述步进电机的输出轴连有所述光杆以使所述光杆轴向运动,所述光杆设有外螺纹;所述运动转换机构设有通孔,所述运动转换机构的通孔设有内螺纹且与所述光杆的外螺纹啮合,所述通孔的宽度大于所述光杆槽的宽度以使所述运动转换机构沿预定方向运动,所述二维激光雷达探测单元与所述运动转换机构相连。3.根据权利要求1所述的便携式飞机泊位自动引导装置,其特征在于,所述微控制器的芯片的型号为勘智k210,所述二维激光雷达探测单元的型号为rplidar-s1,所述微控制器基于神经网络加速器kpu,采用risc-v指令集架构,具有图像信息处理能力,所述激光雷达为轻便型tof激光雷达、可测距离在40m内、采样速度为9200次每秒。
技术总结
本实用新型实施例提供了一种便携式飞机泊位自动引导装置,涉及飞机停泊的技术领域,包括:支座、微控制器、二维激光雷达探测单元、运动单元、三段式LED屏以及摄像单元;微控制器与二维激光雷达探测单元、运动单元、三段式LED屏以及摄像单元相连;微控制器获取摄像单元采集的图像;摄像单元安装于三段式LED屏顶部;三段式LED屏安装于运动单元上方;支座底部设有凸台,运动单元安装于支座底部,运动单元输出轴连有光杆,支座底部的凸台上部设有光杆槽以使光杆位于光杆槽内部,二维激光雷达探测单元通过运动转换机构实现在光杆的上下运动。通过本实用新型可以缓解现有技术中飞机泊机引导装置的便携性差,成本高,机型识别难度大的技术问题。术问题。术问题。
技术研发人员:张长勇 吴刚鑫 张春婷 曹宁
受保护的技术使用者:中国民航大学
技术研发日:2022.01.28
技术公布日:2022/8/11
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。