1.本发明涉及停车管理系统,具体涉及一种智慧城市的智能化停车管理系统。
背景技术:
2.智慧城市是指利用各种信息技术或创新概念,将城市的系统和服务打通、集成,以提升资源的运用效率,优化城市管理和服务,并改善市民的生活质量,在智慧城市建设中停车管理是较为重要的一环。随着经济的飞速发展,城市化进程发展迅速,城市汽车保有量逐年提升,并且提升速度越来越快,道路承载能力和停车资源消纳能力面临严峻挑战,由此引发的交通拥堵、交通事故、停车困难、违章停车、停车纠纷等现象日趋严重,阻碍了社会与经济的发展。因此,对于智慧城市来说,建设配备一个管理高效、数据共享的智能化停车管理系统就显得尤其必要。
3.现有大部分停车场都是由进场车辆自主选择停放车位,但是由于一些驾驶员不熟悉停车场内部环境,会本能地选择“跟车行驶”,容易引发停车场局部行驶拥堵的情况。此外,对于不按指示乱停放的行为无法进行有效监管,导致停车场部分内部道路容易发生较为严重的堵塞情况。
技术实现要素:
4.(一)解决的技术问题
5.针对现有技术所存在的上述缺点,本发明提供了一种智慧城市的智能化停车管理系统,能够有效克服现有技术所存在的自主选择停放车位引发停车场局部行驶拥堵、无法对不按指示乱停放行为进行有效监管的缺陷。
6.(二)技术方案
7.为实现以上目的,本发明通过以下技术方案予以实现:
8.一种智慧城市的智能化停车管理系统,包括服务器,以及
9.第一图像采集模块,设置于停车场入口处用于采集车辆的进场图像;
10.第一车牌识别模块,基于车辆的进场图像进行车牌识别;
11.车位检测模块,分布式设置于各停车位处用于检测各停车位停放状态;
12.车位分配模块,基于车位检测模块的检测结果对各停车位停放状态进行实时更新,并综合各停车位停放状态向进场车辆分配车位号;
13.行驶路径规划模块,根据停车场内的路网信息建立停车场的停车模型,在停车模型中按照行驶至分配停车位的顺序寻找合适的行驶节点,并根据行驶节点规划进场车辆行驶路径;
14.第二图像采集模块,设置于各停车位处用于采集车辆的入库图像;
15.第二车牌识别模块,基于车辆的入库图像进行车牌识别;
16.车位识别模块,基于车辆的入库图像对相应停车位的车位号进行识别;
17.数据匹配模块,用于对入库车辆车牌及对应的识别车位号、进场车辆车牌及对应
的分配车位号进行一致性匹配;
18.车位锁控制模块,基于数据匹配模块的匹配结果对相应停车位的车位锁进行控制;
19.所述第一车牌识别模块、第二车牌识别模块通过卷积层获取特征图,利用全连接层获得特征图中的感兴趣区域,并通过池化层进行处理,实现对图像中车牌信息的识别。
20.优选地,所述车位检测模块检测到停车位停放状态后,连同对应车位号发送至服务器,所述车位分配模块对接收数据进行核对,并对各停车位停放状态进行实时更新。
21.优选地,所述第一车牌识别模块从车辆的进场图像中识别出进场车辆的车牌后,所述车位分配模块综合各停车位停放状态向进场车辆分配车位号,并连同进场车辆的车牌发送至服务器。
22.优选地,所述行驶路径规划模块在停车模型中按照行驶至分配停车位的顺序寻找合适的行驶节点,并根据行驶节点规划进场车辆行驶路径,包括:
23.基于停车场内的路网信息,在停车模型中按照行驶顺序依次选择道路交口作为行驶节点,并根据线路信息将相邻行驶节点之间的距离设定特征值,计算各行驶路径中所有相邻行驶节点的特征值总和,选取特征值总和最少的行驶路径作为进场车辆行驶路径。
24.优选地,若道路交口处行驶路径的曲率大于设定阈值,所述行驶路径规划模块选择圆弧中心点作为行驶节点,否则以道路交点作为行驶节点;
25.所述行驶路径规划模块按照行驶方向对相邻行驶节点进行矢量化,若相邻行驶节点之间的行驶方向与起点至分配停车位的方向之间的夹角大于90
°
,则将相邻行驶节点之间距离的两倍作为特征值,否则直接将相邻行驶节点之间的距离作为特征值。
26.优选地,还包括用于将行驶路径规划模块规划的进场车辆行驶路径推送至移动终端的行驶路径推送模块,所述行驶路径推送模块将进场车辆行驶路径推送至微信小程序,用户登录微信小程序后输入进场车辆车牌,即可查询优选行驶路径。
27.优选地,所述第二车牌识别模块从车辆的入库图像中识别出入库车辆的车牌,且所述车位识别模块从车辆的入库图像中识别出相应停车位的车位号后,所述数据匹配模块对入库车辆车牌及对应的识别车位号、进场车辆车牌及对应的分配车位号进行一致性匹配。
28.优选地,所述数据匹配模块得到入库车辆车牌与进场车辆车牌、识别车位号与分配车位号的一致性匹配结果时,所述服务器通过车位锁控制模块打开该识别车位号对应停车位的车位锁;
29.所述数据匹配模块没有得到入库车辆车牌与进场车辆车牌、识别车位号与分配车位号的一致性匹配结果,或者所述车位检测模块在一段时间内检测停车位维持空位状态时,所述服务器通过车位锁控制模块关闭相应停车位的车位锁。
30.优选地,所述第一车牌识别模块、第二车牌识别模块通过多个卷积层提取图像特征,获得表达不同层次图像特征的多个特征图,利用全连接层获得特征图中的感兴趣区域,通过池化层对包含车牌外部轮廓信息的特征图中的感兴趣区域进行处理,并将处理后的特征图输入分类器中得到车牌信息。
31.优选地,所述利用全连接层获得特征图中的感兴趣区域,包括:
32.将最后一个卷积层提取的特征图输入空间金字塔池化层,获得用于表达该特征图
的特征向量;
33.将空间金字塔池化层得到的特征向量输入至全连接层,获得特征图中包含车牌外部轮廓信息的感兴趣区域。
34.(三)有益效果
35.与现有技术相比,本发明所提供的一种智慧城市的智能化停车管理系统,具有以下有益效果:
36.1)能够根据实时更新的各停车位停放状态,向进场车辆分配车位号,并优选出从停车场入口至分配停车位的进场车辆行驶路径向车主推送,使得进场车辆的停放车位均匀分布在停车场内部,有效防止停车场发生局部行驶拥堵的情况;
37.2)数据匹配模块能够对入库车辆车牌及对应的识别车位号、进场车辆车牌及对应的分配车位号进行一致性匹配,当得到一致性匹配结果时,通过车位锁控制模块打开该识别车位号对应停车位的车位锁,否则关闭该停车位的车位锁,能够对不按分配停车位乱停放的车辆进行有效监管,保证停车场内部的停车秩序。
附图说明
38.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍。显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
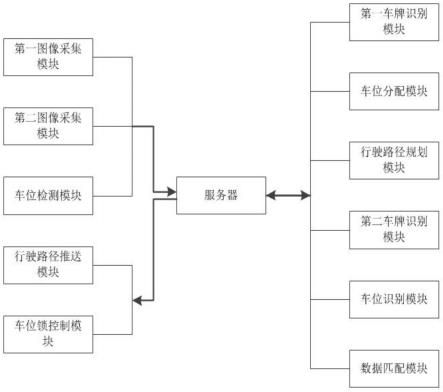
39.图1为本发明的前端控制单元的系统示意图;
40.图2为本发明中行驶路径规划模块规划进场车辆行驶路径的流程示意图;
41.图3为本发明中第一车牌识别模块、第二车牌识别模块识别车牌信息的流程示意图。
具体实施方式
42.为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述。显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
43.一种智慧城市的智能化停车管理系统,如图1所示,包括服务器,以及
44.第一图像采集模块,设置于停车场入口处用于采集车辆的进场图像;
45.第一车牌识别模块,基于车辆的进场图像进行车牌识别;
46.车位检测模块,分布式设置于各停车位处用于检测各停车位停放状态;
47.车位分配模块,基于车位检测模块的检测结果对各停车位停放状态进行实时更新,并综合各停车位停放状态向进场车辆分配车位号;
48.行驶路径规划模块,根据停车场内的路网信息建立停车场的停车模型,在停车模型中按照行驶至分配停车位的顺序寻找合适的行驶节点,并根据行驶节点规划进场车辆行驶路径;
49.第二图像采集模块,设置于各停车位处用于采集车辆的入库图像;
50.第二车牌识别模块,基于车辆的入库图像进行车牌识别;
51.车位识别模块,基于车辆的入库图像对相应停车位的车位号进行识别;
52.数据匹配模块,用于对入库车辆车牌及对应的识别车位号、进场车辆车牌及对应的分配车位号进行一致性匹配;
53.车位锁控制模块,基于数据匹配模块的匹配结果对相应停车位的车位锁进行控制;
54.第一车牌识别模块、第二车牌识别模块通过卷积层获取特征图,利用全连接层获得特征图中的感兴趣区域,并通过池化层进行处理,实现对图像中车牌信息的识别。
55.车位检测模块检测到停车位停放状态后,连同对应车位号发送至服务器,车位分配模块对接收数据进行核对,并对各停车位停放状态进行实时更新。
56.第一车牌识别模块从车辆的进场图像中识别出进场车辆的车牌后,车位分配模块综合各停车位停放状态向进场车辆分配车位号,并连同进场车辆的车牌发送至服务器。
57.本技术技术方案中,根据实时更新的各停车位停放状态,向进场车辆分配车位号,并优选出从停车场入口至分配停车位的进场车辆行驶路径向车主推送,使得进场车辆的停放车位均匀分布在停车场内部,有效防止停车场发生局部行驶拥堵的情况。
58.如图2所示,行驶路径规划模块根据停车场内的路网信息建立停车场的停车模型,基于停车场内的路网信息,在停车模型中按照行驶顺序依次选择道路交口作为行驶节点,并根据线路信息将相邻行驶节点之间的距离设定特征值,计算各行驶路径中所有相邻行驶节点的特征值总和,选取特征值总和最少的行驶路径作为进场车辆行驶路径。
59.在停车模型中选择行驶节点时,若道路交口处行驶路径的曲率大于设定阈值,行驶路径规划模块选择圆弧中心点作为行驶节点,否则以道路交点作为行驶节点。
60.在根据线路信息将相邻行驶节点之间的距离设定特征值时,行驶路径规划模块按照行驶方向对相邻行驶节点进行矢量化,若相邻行驶节点之间的行驶方向与起点至分配停车位的方向之间的夹角大于90
°
,则将相邻行驶节点之间距离的两倍作为特征值,否则直接将相邻行驶节点之间的距离作为特征值。
61.本技术技术方案中,还包括用于将行驶路径规划模块规划的进场车辆行驶路径推送至移动终端的行驶路径推送模块,行驶路径推送模块将进场车辆行驶路径推送至微信小程序,用户登录微信小程序后输入进场车辆车牌,即可查询优选行驶路径。
62.本技术技术方案中,在优选进场车辆行驶路径的过程中,可以结合停车场内各行驶节点的拥堵情况,对进场车辆行驶路径进行优选,车主可以通过登录微信小程序看到优选行驶路径,便于车主快速找到自己的停车位。
63.第二车牌识别模块从车辆的入库图像中识别出入库车辆的车牌,且车位识别模块从车辆的入库图像中识别出相应停车位的车位号后,数据匹配模块对入库车辆车牌及对应的识别车位号、进场车辆车牌及对应的分配车位号进行一致性匹配。
64.数据匹配模块得到入库车辆车牌与进场车辆车牌、识别车位号与分配车位号的一致性匹配结果时,服务器通过车位锁控制模块打开该识别车位号对应停车位的车位锁。
65.数据匹配模块没有得到入库车辆车牌与进场车辆车牌、识别车位号与分配车位号的一致性匹配结果,或者车位检测模块在一段时间内检测停车位维持空位状态(该停车位原停放车辆驶离一段时间)时,服务器通过车位锁控制模块关闭相应停车位的车位锁。
66.本技术技术方案中,数据匹配模块能够对入库车辆车牌及对应的识别车位号、进场车辆车牌及对应的分配车位号进行一致性匹配,当得到一致性匹配结果时,通过车位锁控制模块打开该识别车位号对应停车位的车位锁,否则关闭该停车位的车位锁,能够对不按分配停车位乱停放的车辆进行有效监管,保证停车场内部的停车秩序。
67.如图3所示,第一车牌识别模块、第二车牌识别模块通过多个卷积层提取图像特征,获得表达不同层次图像特征的多个特征图,利用全连接层获得特征图中的感兴趣区域,通过池化层对包含车牌外部轮廓信息的特征图中的感兴趣区域进行处理,并将处理后的特征图输入分类器中得到车牌信息。
68.其中,利用全连接层获得特征图中的感兴趣区域,包括:
69.将最后一个卷积层提取的特征图输入空间金字塔池化层,获得用于表达该特征图的特征向量;
70.将空间金字塔池化层得到的特征向量输入至全连接层,获得特征图中包含车牌外部轮廓信息的感兴趣区域。
71.本技术技术方案中,第一车牌识别模块、第二车牌识别模块通过卷积层获取特征图,利用全连接层获得特征图中的感兴趣区域,并通过池化层进行处理,实现对图像中车牌信息的识别,能够保证对车牌字符识别的准确度。
72.以上实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不会使相应技术方案的本质脱离本发明各实施例技术方案的精神和范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。