1.本实用新型涉及自动驾驶车载设备领域,更具体地,涉及一种传感器的组合单元及车。
背景技术:
2.自动驾驶车辆为了在自动驾驶的过程中保证信息采集的准确性,通常需要同时布置多种传感器,而且传感器之间需要相互搭配,相互组合,才能满足实际所需的效果。由于不同类型的传感器具有不同的安装接口,而同一种传感器通常根据不同采集的需求使用的数量也不相同。这导致现有将所有传感器设置在车辆顶部的集中式设计安装接线复杂,而且效果不佳。
3.为了使不同类型和不同数量的传感器满足相互协作和相互补充的效果,各个传感器之间的位置配合要求高,而集中式设计更使得传感器之间的安装位置相互干扰,相互受制,导致位置分布设计复杂,配合效果不佳。虽然现有技术有通过分散布置的方式进行改善,使得传感器的安装不再相互受制,但这种分散式安装导致传感器之间的接口距离远且分散,导致线缆布置繁琐,而且;在传感器相互配合的过程中不但定位安装过程复杂,而且标定和调试难度大,耗时长,现有技术需要一种新的传感器组合方案以解决上述问题。
技术实现要素:
4.本实用新型旨在克服上述现有技术的至少一种缺陷,提供一种传感器的组合单元及车,用于解决传感器安装难度大,配置繁琐和维护复杂的问题。
5.本实用新型采取的技术方案是,一种传感器的组合单元,包括固定支架,所述固定支架上设有至少两个雷达和多个图像采集装置,所述雷达分别设置在所述在固定支架的上部和所述固定支架的下方;所述图像采集装置设置在所述固定支架的侧沿和/或所述固定支架的下方,所述组合单元还包括用于清洗所述雷达和/或所述图像采集装置的冲洗装置。
6.所述雷达和所述图像采集装置组合形成所述组合单元,在所述组合单元内,所述雷达和所述图像采集装置形成采集范围相互配合和相互补充的模块化一体结构。模块化一体结构能在安装在车上之前,预先好固定雷达与雷达之间,图像采集装置与图像采集装置之间,雷达与图像采集装置之间的相互配合位置,并调试好相互组合的采集效果,使得所述组合单元能快速简单地在车上实现分散式安装,降低了单个传感器逐一在车上直接安装的难度,而且便于维护和更换。具体地,由于安装调试难度的降低,组合单元能进一步配设作用于雷达和图像采集装置的冲洗装置。冲洗装置作用于雷达的采集面和/或图像采集装置的镜头。通过喷气和/或喷液的方式,能快速对采集面和/或镜头进行清洗,达到除尘除渍,保持清洁的效果。从而保证了雷达和图像传感器的采集精度。所述组合单元在清洗装置的作用下实现了自清洁,减少了大量传感器所需的日常维护,为用户节省了时间,使得所述组合单元更智能化和自动化。
7.所述冲洗装置包括第一冲洗装置,所述第一冲洗装置设置在雷达上,包括设置在
所述雷达上端的固定环和设置在固定环上的多个朝向所述雷达的采集面的第一喷头。
8.所述第一冲洗装置用于所述雷达的采集面的清洁。所述固定环将所述第一喷头固定在所述雷达上,利用所述雷达顶部的结构,套设在所述采集面的上部。所述第一喷头用于喷气或喷液。具体地,所述固定环设置在所述雷达的上端,使得所述第一喷头能从上而下地冲刷所述采集面。由于所述雷达的采集面为环形曲面,因此所述第一喷头围绕曲面而设。所述第一喷头能进行喷气清洁和吹干,或喷液清洁,或气液混合清洁等。
9.所述冲洗装置还包括第二冲洗装置,所述第二冲洗装置设置在图像采集装置上,包括设置在所述图像采集装置的镜头上且避让镜头开口的开口挡片,以及与开口挡片相连且朝向所述镜头的第二喷头。
10.所述第二冲洗装置针对所述图像采集装置的镜头,镜头上具有镜头开口,所述开口挡片的开口与镜头开口匹配,使得开口挡片不会对镜头形成遮挡,在不阻碍镜头的情况下围绕镜头镜片,而且利用所述图像传感器自身的结构进行固定。所述第二喷头利用开口挡片固定在镜头上部的中间且正对镜片。利用压缩空气和/或水混合对镜片表面进行喷射,气体和/或水流清理整个镜片,清洗后通过压缩空气吹干。
11.所述雷达包括中距检测雷达和盲区检测雷达;所述中距检测雷达设置在固定支架的上部,所述盲区检测雷达设置在所述固定支架的下方。
12.所述中距检测雷达为主检测雷达,用于检测所述组合单元正前方,对应采集自动驾驶中车的驾驶位的正前方主视觉和正后方倒车视觉;盲区检测雷达为辅助雷达,用于检测所述组合单元下方以及靠后侧的局部范围,对应采集自动驾驶中车的车身下侧至地面,如车轮、车头正下方等的驾驶视觉盲区。具体地,中距检测雷达设置在固定支架上部有助于增大其检测范围,减少遮挡;而盲区检测雷达设置在固定支架的下方有助于拉近盲区检测雷达与视觉盲区的距离,保证盲区的覆盖效果。中距检测雷达和盲区检测雷达的组合覆盖范围广,能一次满足前、后正常使用视野和驾驶盲区视野的扫描,这是传统传感器均设置在顶部的设计所无法实现的。
13.所述盲区检测雷达倾斜设置,所述中距检测雷达竖直设置且顶部设有拱形的遮挡结构。
14.倾斜设置保证了所述盲区雷达从上而下覆盖车的一角位置,减少检测死角;而顶部的遮挡结构有助于所述组合单元整体的防尘和防雨。具体地,所述组合单元的俯视角度下,所述遮挡结构遮挡所有所述组合单元上的雷达和图像传感器。这样的设计一方面有助于防尘和防止异物掉落;另一方面起一定防雨防溅水的作用。拱形的结构有助于减少异物掉落的冲击力,避免积水,并在引导异物向下掉落的过程中提高抗冲击力的效果,从而保护所述组合单元。
15.所述图像采集装置包括中距拍摄组件,盲区拍摄组件,以及远距拍摄组件和/或广角拍摄组件;所述中距拍摄组件设置在所述固定支架的中部,所述远距拍摄组件和/或广角拍摄组件设置在所述中距拍摄组件的下方,所述盲区拍摄组件设置在所述远距拍摄组件和/或广角拍摄组件的下方。
16.所述中距拍摄组件能与雷达配合,形成中距范围内图像和颜色等信息获取;所述远距拍摄组件能与中距摄像组件相互组合,补充中距摄像组件的拍摄距离;而广角拍摄组件则能与中距摄像组件组合,进一步扩大拍摄的角度。盲区拍摄组件能形成车身盲区图像
和颜色等信息获取。具体地,中距拍摄组件能通过多个单独的拍摄单元相互组合,而固定支架中部提供了足够的位置,方便拍摄单元数量较多的中距拍摄组件的安装,使得中距拍摄组件的组合灵活,减少安装环境带来的限制。远距拍摄组件和/或广角拍摄组件设置在中距拍摄组件的下方,一方面是为了缩短与中距拍摄组件的距离,另一方面是为了与中距拍摄组件的拍摄范围形成更好的组合。盲区拍摄组件设置在远距拍摄组件和/或广角拍摄组件的下方有利于拉近与地面的距离。这一空间分布使得三种不同的图像采集装置能紧密地组合在一起,形成采集效果好的一体单元。
17.所述中距拍摄组件包括多个呈排列设置的,位于同一水平面上的,围绕一中心而设且拍摄范围相互组合的中距拍摄装置;多个所述中距拍摄组件组合后形成180
°
至360
°
的拍摄角度。
18.排列设置的所述中距拍摄装置中,位于两端的中距拍摄装置中至少一个正对车的前方或后方。位于同一水平面上且围绕一中心而设使得多个中距拍摄装置与其自身的拍摄角度范围匹配,因而能更容易地形成所需的组合,组合后多个中距拍摄装置的拍摄范围部分重合,从而扩大整体的拍摄范围形成相互结合;多个中距拍摄装置的拍摄范围互有相交,组合形成连续的大角度的拍摄。
19.所述远距拍摄组件和/或广角拍摄组件设在最外侧的中距拍摄装置的正下方。
20.远距拍摄组件和/或广角拍摄组件与正对车正前方或正后方的中距摄像装置相互配合,形成一近一远和/或一窄一宽的组合,设置在中距拍摄装置的正下方有助于简化远距拍摄组件和/或广角拍摄组件在标定过程中的定位,使得标定过程更简单,并使得远距拍摄组件和/或广角拍摄组件与中距摄像组件的组合效果更好。
21.进一步还提供另一个技术方案:一种车,设有多个组合单元,所述组合单元与设置在所述车上且延伸至车身外的装车梁相连。
22.所述组合单元实现的模块化分散式设计与现有在车顶的集中式设计或单个传感器逐一安装的分散式设计相比,不但减少了集中式设计存在的检测盲区;而且简化了单个传感器逐一安装的分散式设计的安装配合难度,使得传感器的标定和安装过程更容易,维护和检修更加方便。进一步,通过在车上形成组合单元的两两组合,能快速实现相邻两个组合单元之间正对方向和对应下部位置被完全覆盖的良好采集范围。
23.同一水平面上对称设置在车身两侧的两个组合单元的雷达检测区域和图像检测区域相互组合,形成对两个组合单元之间的车身侧面正对方向和所述车身侧面下部的完全覆盖。
24.与现有技术相比,本实用新型的有益效果为:所述雷达和所述图像采集装置组合形成所述组合单元,在所述组合单元内,所述雷达和所述图像采集装置形成采集范围相互配合和相互补充的模块化一体结构,使得雷达和图像采集装置在安装在车上之前,能预先固定相互配合的位置,并提前控制实现稳定的组合效果。从而实现快速简单的传感器分散式安装,便于维护和更换,而且实现了自清洁,减少了大量传感器所需的日常维护,为用户节省了时间,使得所述组合单元更智能化和自动化。
附图说明
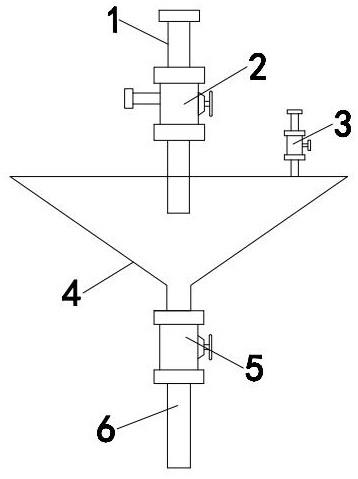
25.图1为本实用新型中组合单元的侧面示意图。
26.图2为本实用新型中组合单元的立体示意图。
27.图3为本实用新型中组合单元的爆炸示意图。
28.图4为本实用新型中两个组合单元形成的盲区检测区域覆盖范围示意图。
29.图5为本实用新型中四个组合单元形成的中距检测区域和盲区检测区域的覆盖范围示意图。
30.附图标记说明:固定支架001,雷达100,中距检测雷达110,盲区检测雷达120,图像采集装置200,中距拍摄装置211,盲区拍摄组件220,远距拍摄组件231,广角拍摄组件232,第一冲洗装置310,固定环311,第二冲洗装置320,开口挡片321,遮挡结构400,装车梁500,地面002,车身003,组合单元004,盲区检测区域005,中距检测区域006。
具体实施方式
31.本实用新型附图仅用于示例性说明,不能理解为对本实用新型的限制。为了更好说明以下实施例,附图某些部件会有省略、放大或缩小,并不代表实际产品的尺寸;对于本领域技术人员来说,附图中某些公知结构及其说明可能省略是可以理解的。
32.实施例1
33.如图1所示,本实施例一种传感器的组合单元,包括固定支架001,固定支架001上设有雷达100和图像采集装置200,组合单元还包括用于清洗雷达100和图像采集装置200的冲洗装置。冲洗装置分别设置在雷达100和图像采集装置200上,包括第一冲洗装置310和第二冲洗装置320,第一冲洗装置310设置在雷达100上,包括设置在雷达100上端的固定环311和设置在固定环311上的多个朝向雷达100的采集面的第一喷头。第二冲洗装置320设置在图像采集装置200上,包括设置在图像采集装置200的镜头上的开口挡片321,以及与开口挡片321相连且朝向镜头的第二喷头。
34.雷达100包括中距检测雷达110和盲区检测雷达120;中距检测雷达110设置在固定支架001的上部,盲区检测雷达120设置在固定支架001的下方。盲区检测雷达120倾斜设置,中距检测雷达110竖直设置且顶部设有拱形的遮挡结构400。如图2所示,图像采集装置200包括中距拍摄组件,盲区拍摄组件220,以及远距拍摄组件231;中距拍摄组件设置在固定支架001的中部,远距拍摄组件231设置在中距拍摄组件的下方,盲区拍摄组件220设置在远距拍摄组件231的下方。中距拍摄组件包括多个中距拍摄装置211,中距拍摄装置211呈排列设置,并位于同一水平面上;中距拍摄装置211围绕一中心而设且拍摄范围相互组合。远距拍摄组件231设在最外侧的中距拍摄装置211的正下方;多个中距拍摄组件组合后形成190
°
的拍摄角度。
35.实施例2
36.如图3所示,本实施例是一种车,设有多个传感器的组合单元004,组合单元004与设置在车上且延伸至车身003外的装车梁500相连。组合单元004包括固定支架001,固定支架001上设有雷达100和图像采集装置200,组合单元004还包括用于清洗雷达100和图像采集装置200的冲洗装置。
37.本实施例中,雷达100和图像采集装置200组合形成组合单元004,雷达100和图像采集装置200采集范围相互配合和相互补充,组合单元004进一步配设作用于雷达100和图像采集装置200的冲洗装置。冲洗装置作用于雷达100的采集面和图像采集装置200的镜头。
通过喷气和喷液的方式,能快速对采集面和镜头进行清洗。固定支架001为双层结构,包括尺寸相互匹配的上安装板和下安装板,上安装板和下安装板为相互平行的圆形板,上安装板和下安装板通过多条支撑柱相连,上安装板和下安装板之间设有能容纳图像采集装置200的安装区。
38.冲洗装置包括第一冲洗装置310和第二冲洗装置320,第一冲洗装置310设置在雷达100上,包括设置在雷达100上端的固定环311和设置在固定环311上的多个朝向雷达100的采集面的第一喷头。
39.本实施例中,第一冲洗装置310用于雷达100的采集面的清洁,固定环311将第一喷头固定在雷达100上,套设在采集面的上部。第一喷头围绕采集面而设。固定环311与第一喷头能形成一体。具体固定环311为中空结构,中空结构为清洁液或气体的存放空腔,中空结构连接外部的供气管和供液管,第一喷头与中空结构连通。当冲洗时,利用压缩空气和水混合对采集面进行喷射,从上而下的水流清理整个采集面,清洗后通过压缩空气吹干。
40.第二冲洗装置320设置在图像采集装置200上,包括设置在图像采集装置200的镜头上的开口挡片321,以及与开口挡片321相连且朝向镜头的第二喷头。
41.本实施例中,第二冲洗装置320针对图像采集装置200的镜头,开口挡片321匹配镜头的大小,围绕镜头镜片且固定在图像传感器上。第二喷头利用开口挡片321固定在镜头上部且正对镜片。利用压缩空气和水对镜片表面进行喷射,水流清理整个镜片。清洗后通过压缩空气吹干。开口挡片321的开口尺寸与镜头的尺寸一致,开口挡片321与镜头之间留有间隙,第二喷头位于间隙内且与开口挡片321相连。第二冲洗装置320固定在图像采集装置200上。第二喷头具有外接的供气管和供液管,并通过供气管和供液管与外部气源及供液源相连。
42.雷达100包括中距检测雷达110和盲区检测雷达120;中距检测雷达110设置在固定支架001的上部,盲区检测雷达120设置在固定支架001的下方。
43.本实施例中,中距检测雷达110为主检测雷达100,用于采集自动驾驶中车的驾驶位的正前方主视觉和正后方倒车视觉;盲区检测雷达120为辅助雷达100,用于采集自动驾驶中车的车身003下侧至地面002,如车轮、车头正下方等的驾驶视觉盲区。中距检测雷达110和盲区检测雷达120均为激光雷达100,中距检测雷达110水平设置且固定在上安装板的上表面的中心。盲区检测雷达120通过与下安装板连接的雷达100支架固定在固定支架001的下方。中距检测雷达110和盲区检测雷达120上均设有第一清洗装置。
44.盲区检测雷达120倾斜设置,中距检测雷达110竖直设置且顶部设有拱形的遮挡结构400。
45.本实施例中,盲区检测雷达120的上端朝向车身003侧倾斜,使其竖直检测范围内的下边缘线垂直于地面002。这样的设计有助于使其在保证检测到车身003下方至地面002区域的基础上,具有最大的车身003检测范围。遮挡结构400的截面为圆形,遮挡结构400的横截面中心、中距检测雷达110的横截面中心和固定支架001的横截面中心位于同一轴线上。组合单元004的俯视角度下,遮挡结构400遮挡所有组合单元004上的雷达100和图像传感器。
46.图像采集装置200包括中距拍摄组件,盲区拍摄组件220,以及广角拍摄组件232;中距拍摄组件设置在固定支架001的中部,广角拍摄组件232设置在中距拍摄组件的下方,
盲区拍摄组件220设置在广角拍摄组件232的下方。
47.本实施例中,中距拍摄组件能与雷达100配合,形成中距范围内图像和颜色等信息获取;远距拍摄组件231能与中距摄像组件相互组合,补充中距摄像组件的拍摄距离;而广角拍摄组件232则能与中距摄像组件组合,进一步扩大拍摄的角度。盲区拍摄组件220能形成车身003盲区图像和颜色等信息获取。中距拍摄组件通过三个单独的拍摄单元相互组合,而固定支架001中部提供了足够的位置,方便拍摄单元数量较多的中距拍摄组件的安装。广角拍摄组件232设置在中距拍摄组件的下方。上安装板和下安装板之间的支撑柱靠近边缘而设,并将安装区分成多个安装位,每个安装位上设有固定结构,中距拍摄组件设置在固定结构上且镜头朝外。固定支架001上还设有扣合固定件,扣合固定件的上部与固定支架001的底部相连,包括对称设置的左侧扣合板和右侧扣合板。左侧扣合板和右侧扣合板配合形成匹配广角拍摄组件232尺寸的扣合固定口。固定支架001下方还设有吊挂固定件,吊挂固定件包括承托板和连杆,承托板水平设置且设有与盲区拍摄组件220匹配的开口,连杆竖直设置,一端与承托板相连,另一端与下安装板的下表面相连。中距摄像组件能是中距相机,远距拍摄组件231能是远距相机,广角拍摄组件232能是广角相机,盲区拍摄组件220能是盲区相机。中距拍摄组件,盲区拍摄组件220,以及广角拍摄组件232上均设有第二清洗装置。
48.中距拍摄组件包括多个呈排列设置的,位于同一水平面上的,围绕一中心而设且拍摄范围相互组合的中距拍摄装置211。
49.本实施例中,一排设置的中距拍摄装置211中,位于两端的中距拍摄装置211中至少一个正对车的前方或后方;三个中距拍摄装置211的拍摄范围互有相交,组合形成连续的大角度的拍摄。具体地,三个中距拍摄装置211的光轴位于同一水平面上且均通过中距雷达100的横截面中心,三个中距拍摄装置211与中心的距离相等。
50.广角拍摄组件232设在最外侧的中距拍摄装置211的正下方;多个中距拍摄组件组合后形成180
°
至360
°
的拍摄角度。
51.本实施例中,广角拍摄组件232与正对车正前方或正后方的中距摄像装置相互配合,形成一窄一宽的组合,正对正前方的中距拍摄装置211的下方能使中距拍摄装置211和远距拍摄组件231的光轴位于同一竖直平面内且相互平行。位于两端的中距拍摄装置211的光轴相互垂直,位于中间的中距拍摄装置211的位于两端的中距拍摄装置211的中间。三个中距拍摄装置211相互组合,形成连续的在同一水平面内225
°
的大角度的图像拍摄。
52.如图4所示,通过在车上形成组合单元004的两两组合,能快速实现相邻两个组合单元004之间正对方向和对应下部位置,即中距检测区域006和盲区检测区域005被完全覆盖的良好采集范围。具体地,组合单元004能设置在车身003的左前侧、右前侧、左后侧和右后侧,相邻两个装车梁500之间对称设置,在水平面上倾斜向车外延伸与组合单元004相连,相邻两个组合单元004之间没有遮挡,四个组合单元004能形成车四周和车身003下部全方位的检测。
53.同一水平面上对称设置在车身003两侧的两个组合单元004的雷达100检测区域和图像检测区域相互组合,形成两个组合单元004之间的车身003侧面正对方向和车身003下部的完全覆盖。
54.如图5所示,本实施例中,左前侧和右前侧的组合单元004的雷达100相互组合形成至少覆盖车身003正前方和车身003前方下部的检测区域;右前侧和右后侧的组合单元004
的雷达100相互组合形成至少覆盖车身003右侧方向和车身003右侧下部的检测区域;左前侧和左后侧的组合单元004的雷达100相互组合形成至少覆盖车身003右侧方向和车身003右侧下部的检测区域;左后侧和右后侧的组合单元004的雷达100相互组合形成至少覆盖车身003正后方和车身003后方下部的检测区域。
55.显然,本实用新型的上述实施例仅仅是为清楚地说明本实用新型技术方案所作的举例,而并非是对本实用新型的具体实施方式的限定。凡在本实用新型权利要求书的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本实用新型权利要求的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。