一种星上ddm实时定标的方法
技术领域
1.本发明涉及gnss遥感技术与应用领域,具体涉及一种星上ddm实时定标的方法。
背景技术:
2.gnss遥感技术是一种基于全球导航卫星系统(global navigation satellite system,gnss)的新型对地遥感探测技术。其中,利用gnss反射信号(gnss-r)对全球海面风场进行探测是当前gnss遥感技术与应用领域中的热点之一。目前,星载gnss遥感探测仪是进行gnss遥感探测的有效载荷,其主要包含定位模块、掩星探测模块、gnss-r探测模块。
3.gnss-r技术主要依靠星载gnss遥感探测仪自带的gnss-r探测模块获取ddm数据(无量纲),并以此来反演全球海面风场。这一反演过程首先就是对获取的ddm数据(无量纲)进行定标。该定标过程可分为两个阶段,分别是l1a级定标和l1b级定标。l1a级定标是将ddm数据(无量纲)转换为表面散射信号功率ddm(单位:w),即l1a ddm。l1b级定标是将l1a ddm进一步转换为归一化的双基雷达散射截面(normalized bi-static radar cross section,nbrcs)ddm,即l1b ddm。最终,基于l1b ddm进行全球海面风场反演。
4.目前,星上对ddm数据进行实时定标的方法在国内外尚属空白。
5.星上ddm实时定标将有助于实现星上实时反演全球海面风场,从而实现全球海面风场的实时探测与预报,这将在海洋气象预报领域发挥十分重要的作用。
技术实现要素:
6.本发明的目的在于克服现有技术缺陷,填补星上ddm实时定标的国内外空白,提供一种星上ddm实时定标的方法。
7.为了实现上述目的,本发明提出了一种星上ddm实时定标的方法,所述方法包括:
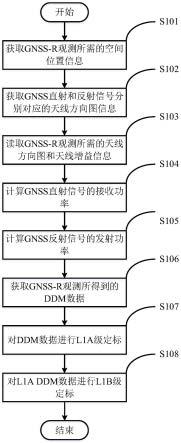
8.步骤s101)获取星载gnss遥感探测仪进行gnss-r观测所需的空间位置信息;
9.步骤s102)根据空间位置信息由几何关系得到gnss直射信号和反射信号分别对应的天线方向图信息;
10.步骤s103)读取进行gnss-r观测所需的gnss卫星发射天线方向图和星载gnss遥感探测仪的天线增益信息;
11.步骤s104)根据星载gnss遥感探测仪跟踪通道i、q路的相干积分值,计算gnss直射信号的接收功率;
12.步骤s105)根据gnss直射信号的接收功率,计算gnss反射信号的发射功率;
13.步骤s106)获取星载gnss遥感探测仪进行gnss-r观测得到的ddm数据;
14.步骤s107)对ddm数据进行l1a级定标得到l1a ddm数据;
15.步骤s108)对l1a ddm数据进行l1b级定标。
16.作为上述方法的一种改进,所述步骤s101)具体包括:
17.获取星载gnss遥感探测仪空间坐标(xr,yr,zr),其中,下标r表示星载gnss遥感探测仪;
18.获取满足gnss-r观测几何的gnss卫星的空间坐标(xg,yg,zg),其中,下标g表示该gnss卫星;
19.在等式(2)的约束下使得等式(1)中gnss反射信号经镜面反射点反射所经过的总的距离r
gsr
的取值最小,从而得到镜面反射点的空间坐标(xs,ys,zs),其中,下标s表示镜面反射点:
[0020][0021][0022]
其中θ
lat
、θ
lon
和h分别表示镜面反射点所对应的纬度、经度和高度,中间变量和h分别表示镜面反射点所对应的纬度、经度和高度,中间变量a是地球长轴半径,e是地球曲率的平方。
[0023]
作为上述方法的一种改进,所述步骤s102)的天线方向图信息具体包括:
[0024]
gnss卫星直射信号对应gnss卫星发射天线方向图的主波束角θ
g,d
和方位角gnss卫星反射信号对应gnss卫星发射天线方向图的主波束角θ
g,r
和方位角星载gnss遥感探测仪定位天线接收到的gnss直射信号对应定位天线方向图的主波束角θ
p
和方位角以及星载gnss遥感探测仪反射天线接收到的gnss反射信号对应反射天线方向图的主波束角
θ
r和方位角
[0025]
作为上述方法的一种改进,所述步骤s103)的天线方向图和天线增益信息具体包括:
[0026]
预先在地面或星上测定的gnss卫星发射天线方向图预先在地面通过定标测定的星载gnss遥感探测仪定位天线增益和星载gnss遥感探测仪反射天线增益
[0027]
作为上述方法的一种改进,所述步骤s104)具体包括:
[0028]
步骤s104-1)读取星载gnss遥感探测仪的gnss直射信号跟踪通道i、q路的相干积分值id和qd;
[0029]
步骤s104-2)对id和qd进行l次非相干积分,得到无量纲数值cd:
[0030]cd
=∑
l
(i
d2
qx2)
[0031]
步骤s104-3)根据下式计算得到gnss直射信号的接收功率pd:
[0032][0033]
其中,gd表示整个处理过程对星载gnss遥感探测仪定位天线接收到的gnss直射信号功率的增益,事先由地面定标测定。
[0034]
作为上述方法的一种改进,所述步骤s105)具体包括:
[0035]
根据gnss直射信号的接收功率pd,由下式计算得到gnss反射信号的发射功率
[0036][0037]
其中,表示gnss卫星发射天线增益,λ为gnss直射信号所对应的载波波长,表示星载gnss遥感探测仪定位天线增益,rd表示gnss卫星发射天线相位中心到星载gnss遥感探测仪定位天线相位中心的距离,
[0038][0039]
作为上述方法的一种改进,所述步骤s106)的ddm数据dc(τ,f)满足下式:
[0040]
dc(τ,f)=g
n,r
(p
a,r
p
i,r
) grpr[0041]
其中,p
a,r
表示星载gnss遥感探测仪反射天线接收到的热噪声功率,p
i,r
表示星载gnss遥感探测仪gnss-r探测模块热噪声功率,pr表示星载gnss遥感探测仪反射天线接收到的gnss反射信号功率,g
n,r
表示整个处理过程对热噪声功率的增益,gr表示整个处理过程对星载gnss遥感探测仪反射天线接收到的gnss反射信号功率的增益。
[0042]
作为上述方法的一种改进,所述步骤s107)具体包括:
[0043]
步骤s107-1)找出镜面反射点所对应的ddm数据单元;
[0044]
步骤s107-2)根据下式计算ddm数据中的平均噪声无量纲:
[0045][0046]
其中,n表示伪码延迟序数,m表示多普勒频率谱线序数,n0表示伪码延迟小于镜面反射点的伪码延迟数目,m表示总的多普勒频率谱线数目。
[0047]
步骤s107-3)根据下式计算得到l1a ddm数据dw(τ,f),完成l1a级定标:
[0048][0049]
其中dw(τ,f)单位为w,gr的值事先由地面定标测定。
[0050]
作为上述方法的一种改进,所述步骤s108)具体包括:
[0051]
根据下式计算得到对应某一ddm单元的归一化的双基雷达散射截面σ0:
[0052][0053]
其中,l
gs
表示gnss反射信号从gnss卫星传输至镜面反射点的过程中遭受的地球表面大气损耗,l
sr
表示gnss反射信号从镜面反射点传输至gnss遥感探测仪的过程中遭受的地球表面大气损耗,表示对应某一ddm单元的有效散射面积,满足下式:
[0054][0055]
其中,a表示某一ddm单元所对应的海洋表面散射区域面积,λ
τ
表示该ddm单元所
对应的伪码延迟的归一化自相关函数值,sf表示该ddm单元所对应的多普勒频率的归一化积分增益,s表示面积;
[0056]
对镜面反射点所对应的每个l1a ddm数据单元均进行以上计算,从而完成l1b级定标。
[0057]
与现有技术相比,本发明的优势在于:
[0058]
1、本发明提出的星上ddm实时定标的方法,填补了星上ddm实时定标的国内外空白,为进一步增强星载gnss遥感探测仪应用能力并实现星上实时反演全球海面风场奠定基础;
[0059]
2本发明提出的方法不增加星载gnss遥感探测仪硬件系统复杂度,成本较低,容易实现;
[0060]
3、本发明提出的方法利用直射信号进行定标,能够很好地解决gnss卫星发射功率抖动导致定标偏差的问题;
[0061]
4、本发明提出的方法实时性高,有助于实现星上实时反演全球海面风场。
附图说明
[0062]
图1是本发明星上ddm实时定标的方法的流程图;
[0063]
图2是本发明gnss-r观测几何示意图;
[0064]
图3是本发明计算gnss直射信号的接收功率的方法的流程图;
[0065]
图4是本发明对ddm数据进行l1a级定标的方法的流程图。
具体实施方式
[0066]
本文所述空间坐标均基于地心地固坐标系(earth centered earth fixed,ecef)。
[0067]
一种星上ddm实时定标的方法,所述方法包括:
[0068]
步骤s101)获取星载gnss遥感探测仪进行gnss-r观测所需的空间位置信息;
[0069]
步骤s102)根据空间位置信息由几何关系得到gnss直射信号和反射信号分别对应的天线方向图信息;
[0070]
步骤s103)读取进行gnss-r观测所需的gnss卫星发射天线方向图和星载gnss遥感探测仪的天线增益信息;
[0071]
步骤s104)根据星载gnss遥感探测仪跟踪通道i、q路的相干积分值,计算gnss直射信号的接收功率;
[0072]
步骤s105)根据gnss直射信号的接收功率,计算gnss反射信号的发射功率;
[0073]
步骤s106)获取星载gnss遥感探测仪进行gnss-r观测得到的ddm数据;
[0074]
步骤s107)对ddm数据进行l1a级定标得到l1a ddm数据;
[0075]
步骤s108)对l1a ddm数据进行l1b级定标。
[0076]
下面结合附图和实施例对本发明的技术方案进行详细的说明。
[0077]
实施例1
[0078]
如图1所示,本发明的实施例提出了一种星上ddm实时定标的方法,具体实施步骤包括:
[0079]
步骤s101)获取gnss-r观测所需的空间位置信息基于如图2所示的gnss-r观测几何可知,gnss-r观测所需的空间位置信息包括:(1)星载gnss遥感探测仪空间坐标(xr,yr,zr);
[0080]
(2)满足gnss-r观测几何的gnss卫星空间坐标(xg,yg,zg);
[0081]
(3)镜面反射点空间坐标(xs,ys,zs)。
[0082]
gnss遥感探测仪自带的定位模块通过处理其接收到的众多gnss直射信号,一方面可获取发射相应直射信号的gnss卫星的星历从而解算出这些gnss卫星的空间坐标,另一方面可基于此实现星载gnss遥感探测仪的精确定位从而解算出星载gnss遥感探测仪的空间坐标。
[0083]
星载gnss遥感探测仪的空间坐标为(xr,yr,zr),其中,下标r表示接收机——星载gnss遥感探测仪。与之相对应的空间位置向量表示为满足gnss-r观测几何的gnss卫星(以下简称gnss卫星)空间坐标为(xg,yg,zg),其中,下标g表示该gnss卫星。与之相对应的空间位置向量表示为根据gnss-r观测几何,有下式:
[0084][0085]
其中,r
gs
表示gnss卫星发射天线相位中心到镜面反射点的距离,r
sr
表示镜面反射点到星载gnss遥感探测仪反射天线相位中心的距离,r
gsr
表示gnss反射信号经镜面反射点反射所经过的总的距离。向量表示为向量表示为毫无疑问,镜面反射点处于地球表面。因此,根据wgs84(world geodetic system1984),有下式:
[0086][0087]
其中θ
lat
、θ
lon
和h分别表示镜面反射点所对应的纬度、经度和高度,和h分别表示镜面反射点所对应的纬度、经度和高度,a是地球长轴半径,取值为6378137m,e是地球曲率的平方,取值为0.0066943799901400m。
[0088]
镜面反射点的空间坐标(xs,ys,zs)满足在等式(2)的约束下使得等式(1)中r
gsr
的取值最小。基于此,可计算出坐标(xs,ys,zs)。其中,下标s表示镜面反射点。除此之外,并且rd表示gnss卫星发射天线相位中心到星载gnss遥感探测仪定位天线相位中心的距离。向量表示为
[0089]
步骤s102)获取gnss直射和反射信号分别对应的天线方向图信息基于如图2所示的gnss-r观测几何可知,gnss直射与反射信号分别对应的天线方向图信息包括:
[0090]
(1)gnss卫星直射信号对应gnss卫星发射天线方向图的主波束角(boresight angle)θ
g,d
和方位角(azimuth angle)
[0091]
(2)gnss卫星反射信号对应gnss卫星发射天线方向图的主波束角θ
g,r
和方位角
[0092]
(3)星载gnss遥感探测仪定位天线接收到的gnss直射信号对应定位天线方向图的主波束角θ
p
和方位角
[0093]
(4)星载gnss遥感探测仪反射天线接收到的gnss反射信号对应反射天线方向图的主波束角θr和方位角
[0094]
由向量与向量之间的几何关系确定。
[0095]
由向量与向量之间的几何关系确定。
[0096]
由向量与向量之间的几何关系确定。
[0097]
由向量与向量之间的几何关系确定。
[0098]
步骤s103)读取gnss-r观测所需的天线方向图和天线增益信息gnss-r观测所需的天线方向图和天线增益信息包括:
[0099]
(1)gnss卫星发射天线方向图
[0100]
(2)星载gnss遥感探测仪定位天线增益
[0101]
(3)星载gnss遥感探测仪反射天线增益gnss卫星发射天线方向图事先在地面或者在星上测定。星载gnss遥感探测仪定位天线增益事先在地面通过定标测定。星载gnss遥感探测仪反射天线增益事先在地面通过定标测定。
[0102]
步骤s104)计算gnss直射信号的接收功率
[0103]
星载gnss遥感探测仪自带的定位模块包含大量并行跟踪通道用于同时跟踪多路gnss直射信号。其中有一跟踪通道用于跟踪该gnss卫星发射的直射信号。具体步骤如图3所示。
[0104]
步骤s104-1)读取跟踪通道i、q路的相干积分值id和qd。
[0105]
读取用于跟踪该gnss卫星发射的直射信号的跟踪通道i、q路的相干积分值id和qd,其相干积分时间为1ms或10ms等,由gnss信号调制方式等因素共同决定。
[0106]
步骤s104-2)进行l次非相干积分,可得数值cd(无量纲),并且cd可表示为:
[0107][0108]
其中,pa表示由星载gnss遥感探测仪定位天线接收到的热噪声功率,pi表示星载gnss遥感探测仪定位模块热噪声功率,pd表示由星载gnss遥感探测仪定位天线接收到的gnss直射信号功率(即gnss直射信号的接收功率)。gn表示整个处理过程对热噪声功率的增益,gd表示整个处理过程对星载gnss遥感探测仪定位天线接收到的gnss直射信号功率的增益。
[0109]
步骤s104-3)读取gd的值。
[0110]
gd的值事先由地面定标确定。
[0111]
步骤s104-4)计算gnss直射信号的接收功率
[0112]
根据gnss直射信号闭环跟踪原理可知,跟踪通道对gnss直射信号的载波相位和伪码相位进行实时稳定精确的估计。在积分时间足够长的条件下(例如,积分时间为1s),有:
[0113]
gd>>gnꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(4)
[0114]
基于等式(4),等式(3)可简化为:
[0115][0116]
因此,有:
[0117][0118]
基于等式(6),可以计算得到gnss直射信号的接收功率。
[0119]
步骤s105)计算gnss反射信号的发射功率
[0120]
根据双基雷达信号传输模型,gnss直射信号的接收功率可表示为:
[0121][0122]
其中,pg表示gnss卫星的信号发射功率,gg表示gnss卫星发射天线增益,λ为gnss直射信号所对应的载波波长。
[0123]
基于等式(7)可得:
[0124][0125]
除此之外,根据gnss卫星发射天线方向图可得:
[0126][0127]
其中,δg表示gnss卫星发射的反射信号与直射信号所对应的天线增益之比。因此,此时gnss反射信号的发射功率为:
[0128][0129]
等式(10)表明,利用gnss直射信号可以计算出gnss反射信号的发射功率。
[0130]
步骤s106)获取gnss-r观测所得到的ddm数据
[0131]
ddm数据(无量纲)dc(τ,f)为一n
×
m(n,m∈n
)二维矩阵。其中,n表示伪码延迟序数,相邻两个伪码延迟的间隔表示伪码延迟分辨率δτ(单位:码片)。m表示多普勒频率谱线序数,相邻两个多普勒频率谱线的间隔表示多普勒频率分辨率δf(单位:hz)。每个ddm数据单元对应一组不同的(τ,f)的取值。
[0132]
例如,n=61,m=64,δτ=0.25chip,δf=500hz。
[0133]
根据ddm数据生成过程可知,同等式(3),dc(τ,f)可表示为:
[0134]
dc(τ,f)=g
n,r
(p
a,r
p
i,r
) grprꢀꢀꢀ
(11)
[0135]
其中,p
a,r
表示星载gnss遥感探测仪反射天线接收到的热噪声功率,p
i,r
表示星载gnss遥感探测仪gnss-r探测模块热噪声功率,pr表示星载gnss遥感探测仪反射天线接收到的gnss反射信号功率,g
n,r
表示整个处理过程对热噪声功率的增益,gr表示整个处理过程对星载gnss遥感探测仪反射天线接收到的gnss反射信号功率的增益。
[0136]
步骤s107)对ddm数据进行l1a级定标,具体步骤如图4所示。
[0137]
步骤s107-1)找出镜面反射点所对应的ddm数据单元镜面反射点所对应的ddm数据单元一般为本地伪码延迟为0chip并且多普勒频率为0hz所对应的ddm数据单元。例如,镜面反射点所对应的ddm数据单元为n=13,m=32。
[0138]
步骤s107-2)计算ddm数据中的平均噪声(无量纲)
[0139]
镜面反射点所对应的延迟为星载gnss遥感探测仪反射天线能接收到gnss反射信号的最小延迟。当延迟小于该最小延迟时,意味着此时星载gnss遥感探测仪反射天线不能接收到gnss反射信号。因此有:
[0140]
dc(τ,f)=g
n,r
(p
a,r
p
i,r
),n∈[1,12]
ꢀꢀꢀ
(12)
[0141]
基于等式(12),ddm数据中的平均噪声(无量纲)表示为:
[0142][0143]
其中,(无量纲)表示ddm数据中的平均噪声,n表示伪码延迟序数,m表示多普勒频率谱线序数,n0表示伪码延迟小于镜面反射点的伪码延迟数目,m表示总的多普勒频率谱线数目。n0,m分别取值为12、64,计算公式如下:
[0144][0145]
其中,12、64是本文为了描述方便设定的取值,实际过程中,取值可以按设计要求取不同的值。
[0146]
步骤s107-3)对ddm数据进行l1a级定标
[0147]
基于等式(11)、(12)和(13)可得:
[0148][0149]
基于等式(14),可得:
[0150][0151]
其中,gr的值事先由地面定标测定。因此,基于等式(15)得到l1a ddm——dw(τ,f)(单位:w)。
[0152]
步骤s108)对l1a ddm数据进行l1b级定标
[0153]
根据gnss反射信号的双基雷达模型,dw(τ,f)表示为:
[0154][0155]
将等式(10)带入等式(16)可得:
[0156][0157]
其中,l
gs
表示gnss反射信号从gnss卫星传输至镜面反射点的过程中遭受的地球表面大气损耗,l
sr
表示gnss反射信号从镜面反射点传输至gnss遥感探测仪的过程中遭受的地球表面大气损耗,σ0为对应某一ddm单元的归一化的双基雷达散射截面(nbrcs),表示对应某一ddm单元的有效散射面积,并且有:
[0158][0159]
其中a表示某一ddm单元所对应的海洋表面散射区域面积,λ
τ
表示该ddm单元所对应的伪码延迟的归一化自相关函数值,sf表示该ddm单元所对应的多普勒频率的归一化积分增益。
[0160]
联合等式(17)、(18)可得:
[0161][0162]
根据等式(19),计算得到各ddm单元所对应的nbrcs,完成l1b级定标。
[0163]
最后所应说明的是,以上实施例仅用以说明本发明的技术方案而非限制。尽管参照实施例对本发明进行了详细说明,本领域的普通技术人员应当理解,对本发明的技术方案进行修改或者等同替换,都不脱离本发明技术方案的精神和范围,其均应涵盖在本发明的权利要求范围当中。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
