1.本发明属于大气污染领域,特别涉及到一种基于自适应动态图的空气质量预测方法。
背景技术:
2.空气质量问题与人类的生产生活密切相关。一方面,大气污染危害着人体身体健康,通过进行空气质量预报的研究可以方便人类合理规划排放和出行,制定决策;其次,大气污染是一个全球性问题,我国受到大气污染影响严重。尽管近几年空气质量在逐年改善,但是距发达国家标准还有很大差距。大气污染的治理已经迫在眉睫。
3.近年来,得益于传感器网络的部署,大气污染系统的研究已经进入大数据时代,而深度学习方法具有准确性高、运算效率高、可梯度优化等特点,相比传统方法能更好的应对这些挑战。
4.大数据驱动大气污染建模这个领域已经有了大量的研究工作,其方法最早来源于时间序列预测建模。传统时间序列预测建模方法,通常假设变量未来数值与自身以及其他因变量的历史数据是相关的。但是这些方法仅考虑了变量历史时序上的相关性,而忽略了空间相关性,特别是像传感器网络这样非欧空间上的相关性。因此近年来,图神经网络的方法因其便利的非欧空间建模方式,在大气污染领域大放异彩。
5.由于空气中的污染物存在传输、扩散、反应等过程,因此其他相邻节点的空气质量数据也会对当前节点未来的污染物浓度产生影响。通常这种神经网络框架所用到的图神经网络结构需要提前根据先验信息给定,其构造方法通常可以分为三种:根据距离构建的网络,根据节点数值相似性阈值构建的网络,以及根据风场信息构造的网络。但是由于先验知识的不完全性和不准确性,容易在前期就引入错误的空间相关性信息。
技术实现要素:
6.本发明的目的是解决现有图神经网络建模方法中,由于先验信息不完全导致站点间网络结构建模不准确的问题。因此,本发明设计了一种基于自适应动态图神经网络的空气质量预测方法。
7.该方法基于自适应动态图神经网络(dynamic graph neural network with adaptive edge attributes,dgn-aea)模型。该模型由有向图上消息传递网络模块(massage passing neural networks,mpnn)、多图融合模块(multi-graph processing block,mgb)与时间序列处理模块(gate recurrent unit,gru)组成。
8.本发明方法包含如下步骤:第1步,初始化网络结构。利用地理先验信息,包括站点间相对距离和实时风速风向构建有向的先验动态图结构网络,同时随机初始化非对称的可学习连边矩阵作为自适应图结构网络;第2步,图卷积模块。利用有向图上的消息传递网络模块mpnn,对第1步得到的两个
图结构网络的节点和连边属性,分别对每一个节点及其邻居的出入连边上进行消息传递和汇聚,从而得到两个图结构网络对应的图上特征;第3步,多图融合模块。利用多图融合模块mgb,融合上述两个图上特征,得到整个空间上的高维特征;第4步,时间序列处理模块。利用带有门控的循环神经网络gru,通过输入空间上的相关性信息、历史时序信息以及已知的未来气象数据,迭代隐藏层状态,从而得到未来空气质量预测结果。
9.本发明的优点和有益效果:本发明通过通过引入有向的自适应动态图神经网络,在保留先验动态图网络结构的同时,又能通过端到端地训练不断优化网络结构,提升了图神经网络消息聚合的准确性,从而输出更加准确的未来空气质量预测序列。经实验,本发明在公开的3个数据集的所有评测指标上,均超越了目前最前沿的空气质量预测方法。
附图说明
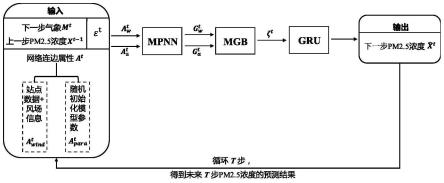
10.图1为本发明基于自适应动态图神经网络模型dgn-aea的空气质量预测方法的流程图。
11.图2为本发明中有向图上的消息传递网络模块mpnn的具体实施框架图。
12.图3为本发明中多图融合模块mgb的具体实施框架图。
13.图4为本发明中时序处理模块gru的具体实施框架图。
14.图5为本发明与其他对比方法,在3个数据集,4种不同预测步长上的实验结果。
15.图6为本发明先验图结构网络(图左)和优化后的自适应图结构网络(图中),以及为凸显二者区别的矩阵差值可视化(图右)。
16.图7为本发明数据集时间维度划分方式。
具体实施方式
17.本技术方案可以对大气中任一污染物浓度进行预测,这里我们以空气中主要污染物pm2.5为例,结合附图来进一步说明本发明的技术方案。
18.参考图1所示的模型框架,实施步骤如下:a. 记时刻网络连边属性为,根据站点数据中的站点间距离和风场信息计算有向的先验图结构网络的连边属性,并随机初始化非对称的自适应图结构网络的连边属性作为补充信息;b. 使用一个图上消息传递网络模块(massage passing neural networks,mpnn),从包含自身和邻居节点未来气象信息和历史pm2.5浓度的节点属性中,以及两类有向的网络连边属性和中,分别提取图上特征和;c. 接着使用一个多图融合模块(multi-graph processing block,mgb),将挖掘
到的两张图上特征和合并后做信息提取,得到整个空间上的高维特征;d. 最后使用一个带有门控的时序处理模块(gate recurrent unit,gru),从整个空间上的相关性信息、pm2.5浓度中提取有效信息并更新隐藏层状态;e. 重复上述a-d操作次,得到未来步的pm2.5浓度预测结果。
19.上述mpnn模块参考图2所示,具体实现步骤为:a. 依次使用2个不同维度的线性变换层和sigmoid激活函数层的组合,对于节点及其邻居,分别对有向图上节点的出入边属性和以及源、汇节点属性和进行变换,分别得到得到连边消息传递结果和;b. 将和分别与对应节点的pm2.5浓度值进行加权求和(scatter add),并模拟污染物汇入流出过程进行加法操作,然后依次经过1个线性变换层和1个sigmoid激活函数层实现归一化操作得到所挖掘的对应图上节点i的特征;c. 对所有节点重复如上操作,得到整个图上特征;d. 分别对两个图连边属性和重复上述操作,得到有向的先验图结构网络的图上特征以及作为补充信息的非对称的自适应图结构网络的图上特征。
20.上述mgb模块参考图3所示,具体实现步骤为:a. 对输入两个图上特征和在最后一个维度进行拼接,然后通过1个多层感知机(multi-layer perceptron,mlp),包括线性变换层和1个sigmoid函数激活层,得到融合变换后特征;b.对得到的特征信息进行layernorm归一化操作,使得保留其差异特征的基础上维持高斯分布假设,最终得到整个空间上的高维特征。
21.上述gru模块参考图4所示,具体实现步骤为:a. 参考文献“cho, kyunghyun, et al. "learning phrase representations using rnn encoder-decoder for statistical machine translation." arxiv preprint arxiv:1406.1078 (2014).”中提出的算法,首先对输入的空间上的高维特征、上一步pm2.5浓度以及下一步气象数据在最后一维进行拼接,得到高维输入变量矩阵;b.初始化隐藏层状态为零;c. 对高维输入变量和隐藏层状态分别通过1层线性变换层并按维度进行分解,依
次得到中间变量、、和、、;d. 计算遗忘门和更新门的状态,计算公式为:,;e. 根据更新门结果,计算输入门的更新内容:;f. 更新隐藏层结果,计算公式为:;g. 循环迭代隐藏层,经过1层全连接层(fully connected layer)得到下一步的pm2.5浓度预测结果。
22.在训练阶段,使用真实的未来空气质量数值作为监督信息,使用mse loss函数与预测的数值进行损失函数计算。损失函数定义为如下公式:其中,是节点数,是未来预测的时间步长。
23.模型的训练过程如下:对数据进行均值方差归一化,并对预测结果同样进行反归一化;训练过程中,批(batch)大小为32,优化器为rmsprop,学习率为 0.001,采用早停(earlystop)机制(步数设置为10个epoch),最多训练50轮(epoch)。
24.本发明的有益效果通过以下仿真实验进一步说明:实验数据集与仿真条件:参考文献“s. wang, y. li, j. zhang, q. meng, l. meng, f. gao, pm2.5-gnn: a domain knowledge enhanced graph neural network for pm2.5 forecasting, in: proceedings of the 28th international conference on advances in geographic information systems, 2020, pp. 163
–
166.”使用来源于mee(https://english.mee.gov.cn/)和ear5(https://climate.copernicus.eu/climate
‑ꢀ
reanalysis)下载的包含有184个城市站点数据的处理后数据集。包括2015年1月1日-2018年12月31日的全部空气质量污染数据,以及站点基础信息和气象数据值。参考文献做法,我们将其按时间维度划分为3个数据集,具体划分方式如图7所示。
25.基于pytorch深度学习框架开发,运行于nvidia tesla k80 gpu平台。
26.伪装物体检测性能评价标准:采用平均绝对误差mae、均方根误差rmse。计算公式如下:;。
27.图5给出来本发明和当前最先进的5个对比方法,在上述3个数据集,4种预测步长,重复10次实验,2个指标上的实验结果。需要特别说明的是,对于对比的graph wavenet模型,其原生模型仅在变量维度进行了一维卷积,因此我们在复现的时候并没有输入多维未来气象数据(w/o weather)。可以看出,本发明的方法是显著优于对比方法的。特别地,相比第二优的对比方法pm
2.5-gnn,本发明方法平均来看在mae指标上降低了1.73%,rmse降低了1.36%,达到了目前空气质量预测方法中最优的预测水平。
28.图6为本发明使用到的两种图结构网络矩阵的可视化对比,依次为先验图结构网络(图左)和优化后的自适应图结构网络(图中),以及为凸显二者区别的矩阵差值可视化(图右)。可以看出,两种图都是非对称的即有向图,同时自适应图相比先验信息计算出来的图结构连边间权重差距更小,可以起到一定对先验信息的补充作用。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
