1.本发明涉及雷达技术领域,具体涉及基于空间极坐标斜距模型的极坐标成像方法。
背景技术:
2.随着雷达技术的进步,高超声速平台成为合成孔径雷达成像技术的一个重要应用方向。高超声速合成孔径雷达比机载合成孔径雷达具有更大的观测范围,比星载合成孔径雷达具有更强的航迹灵活性,这主要基于以下两个方面的原因:(1)高超声速平台的平台高度位于机载与星载平台之间;(2)高超声速平台具有更大更复杂的加速度形式。
3.高超声速平台具有高速、高机动性、航迹灵活的特点,高超声速平台合成孔径成像的问题主要是高速和复杂加速度引起的多普勒模糊及混叠和大斜视、高频段条件下的严重耦合和空变相位。因此高频段大斜视高超声速合成孔径雷达成像方法的设计关键就是减少成像算法在大斜视、复杂加速度和高频段条件下的残余相位误差。
4.近年来已有许多关于高速及加速平台合成孔径雷达成像方法的工作发表。如易予生在2009年借助驻相点法和级数反演等近似推导了俯冲加速运动下的弹载合成孔径雷达的二维频谱,相应补偿二维耦合相位和二维匹配滤波,是非常典型的频域算法思路;唐世阳2014年针对三维常加速度弹载合成孔径雷达推导了常加速度等效距离徙动算法斜距模型,结合距离徙动算法进行聚焦成像;张强辉则在2021年给出了地球同步轨道卫星作为发射机,高超平台作为接收机的双基sar成像方法,工作重点在于双基合成孔径雷达斜距模型的优化表达。
5.在以上这些高速平台合成孔径雷达成像方法中,虽然都在考虑到雷达加速度的情况下重建斜距或者频谱模型,但在平台复杂运动情况下方位平移不变性不再适用,对斜距模型关于成像坐标二元近似会引入波束中心近似,造成较大的残余空变相位误差,直接影响算法的有效聚焦范围。
技术实现要素:
6.针对现有技术中存在的问题,本发明的目的在于提供基于空间极坐标斜距模型的极坐标成像方法。
7.为了达到上述目的,本发明采用以下技术方案予以实现。
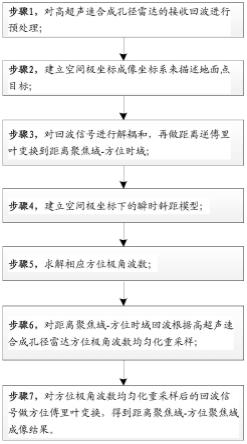
8.基于空间极坐标斜距模型的极坐标成像方法,包括以下步骤:
9.步骤1,对高超声速合成孔径雷达的接收回波进行预处理;
10.步骤2,建立空间极坐标成像坐标系来描述地面点目标;
11.步骤3,对回波信号进行解耦和,再做距离逆傅里叶变换到距离聚焦域-方位时域;
12.步骤4,建立空间极坐标下的瞬时斜距模型;
13.步骤5,求解相应方位极角波数;
14.步骤6,对距离聚焦域-方位时域回波根据高超声速合成孔径雷达方位极角波数均
匀化重采样;
15.步骤7,对方位极角波数均匀化重采样后的回波信号做方位傅里叶变换,得到距离聚焦域-方位聚焦域成像结果。
16.与现有技术相比,本发明的有益效果为:
17.(1)本发明的极坐标斜距模型是从最一般的雷达数据录取几何中推导出来的,未采用任何近似,不会造成相位误差,从而最终的成像效果更好;而现有的较常用的加速模型下的合成孔径雷达成像方法中,斜距模型都经过了大量的近似,适用于低频简化雷达运动参数下的成像需求,雷达发射信号载频较高时,这些近似误差将会造成大量的残余相位误差,尤其是在大斜视复杂运动参数下,算法依赖的方位平移不变性将彻底失效,在此基础上建立的合成孔径雷达成像算法和运动补偿算法大多不再适用。
18.(2)本发明中在极坐标斜距模型下的方位滤波器在距离聚焦域计算得到,因此空变相位误差不随距离位置坐标变化,只存在方位向聚焦范围限制,从而最终的成像效果更好;而现有的高速平台合成孔径雷达成像算法在处理二维聚焦问题时通常在二维频域或者二维波数域处理,虽然都可以在相应雷达系统参数下完成聚焦,但是在二维非聚焦域的处理不可避免引入了中心波数近似,即滤波器在参考点处是精确的,随二维坐标增大,一致滤波的残余空变相位误差增加,限制了算法的二维有效聚焦范围。
附图说明
19.下面结合附图和具体实施例对本发明做进一步详细说明。
20.图1是本发明基于空间极坐标斜距模型的极坐标成像方法的流程图;
21.图2是高超声速合成孔径雷达的数据录取直角坐标系及空间极坐标成像坐标系的示意图;
22.图3是本发明中空间极坐标成像坐标系的等效模型示意图;
23.图4是本发明中方位极角波数均匀化重采样的原理示意图;
24.图5是仿真试验中点目标的坐标示意图;
25.图6(a)是仿真试验中,试验1对点目标p1~p4的斜距模型误差造成的相位误差;图6(b)是仿真试验中,试验2对点目标p1~p4的斜距模型误差造成的相位误差;
26.图7(a)是仿真试验中试验1对点目标p1的成像结果示意图;图7(b)是仿真试验中试验2对点目标p1的成像结果示意图;图7(c)是仿真试验中试验1和试验2对点目标p1的方位脉冲响应曲线的对比图;
27.图7(d)是仿真试验中试验1对点目标p2的成像结果示意图;图7(e)是仿真试验中试验2对点目标p2的成像结果示意图;图7(f)是仿真试验中试验1和试验2对点目标p2的方位脉冲响应曲线对比图;
28.图7(g)是仿真试验中试验1对点目标p3的成像结果示意图;图7(h)是仿真试验中试验2对点目标p3的成像结果示意图;图7(i)是仿真试验中试验1和试验2对点目标p3的方位脉冲响应曲线对比图;
29.图7(j)是仿真试验中试验1对点目标p4的成像结果示意图;图7(k)是仿真试验中试验2对点目标p4的成像结果示意图;图7(l)是仿真试验中试验1和试验2对点目标p4的方位脉冲响应曲线对比图。
具体实施方式
30.下面将结合实施例对本发明的实施方案进行详细描述,但是本领域的技术人员将会理解,下列实施例仅用于说明本发明,而不应视为限制本发明的范围。
31.参考图1,基于空间极坐标斜距模型的极坐标成像方法,包括以下步骤:
32.步骤1,对高超声速合成孔径雷达的接收回波进行预处理;
33.具体的,如图2所示,高超声速平台飞行轨迹复杂,高超声速合成孔径雷达在数据录取直角坐标系oxyz内合成孔径中心位置为(xa,ya,za),此时的速度矢量为v=(v
x
,vy,vz),场景中任意点目标p在数据录取直角坐标系oxyz的坐标为(x
p
,y
p
,0),则时变加速度造成的雷达位置偏移量为:
34.δ=(δ
x
,δy,δz)=(∫∫a
x
(tm)dtmdtm,∫∫ay(tm)dtmdtm,∫∫az(tm)dtmdtm)
35.从合成孔径中心指向点目标的斜距矢量为r
p
=(δx
p
,δy
p
,δz)=(x
p-xa,y
p-ya,-za),则随方位采样时间变化的瞬时斜距矢量为:
36.r
p
(tm)=r
p-vt
m-δ
37.瞬时斜距为:
[0038][0039]
其中,[x(tm),y(tm),z(tm)]=(v
x
tm δ
x
,vytm δy,vztm δz)表示高超声速雷达随方位采样时间变化的真实航迹位置;
[0040]
在方位采样时刻tm雷达发射线性调频信号为:
[0041]
s(t)=exp[j2πfct jπγt2]
[0042]
高超声速合成孔径雷达的接收回波为:
[0043][0044]
去载频并距离匹配滤波后得到:
[0045][0046]
方位去斜后的信号形式为:
[0047]
s0(k
ra
,tm)=exp{-jk
ra
[r
p
(tm)-rc(tm)]}
[0048]
其中,rc(tm)是合成孔径中心指向场景中心点(xc,yc,0)的瞬时斜距。
[0049]
步骤2,建立空间极坐标成像坐标系来描述地面点目标;
[0050]
具体的,在高超声速合成孔径雷达的合成孔径中心(即成像位置)处建立与速度相关的空间极坐标系,如图2所示,合成孔径中心时刻的速度矢量v位于地平面的铅垂面oy
vzv
中,点目标p位于斜距矢量r
p
和速度矢量v构成的斜平面ω
p
上,斜平面ω
p
和垂面oy
vzv
的夹角
为则以地面的铅垂面oy
vzv
作为基准,用描述地面点目标。
[0051]
每一个点目标的成像斜距矢量与速度矢量构成的斜平面都是唯一的,反映了雷达波束照射关系,将每个斜平面按照平面旋转角旋转可以将不同的斜平面在中心斜平面(场景中心点所在斜平面)处融合,实现了三维波束的平面化投影。坐标变换未使用近似,也就是此投影是完全精确的。
[0052]
步骤3,对回波信号进行解耦和,再做距离逆傅里叶变换到距离聚焦域-方位时域;
[0053]
具体的,对方位去斜后的信号进行一阶keystone解耦和至距离聚焦域得到:
[0054][0055]
其中,距离分辨率ρr=c/(2b),r
p
(tm)-rc(tm)为对式中差分斜距;
[0056]rp
(tm)-rc(tm)关于方位极坐标变量在中心值处泰勒展开为:
[0057]rp
(tm)≈k0(tm) k1(tm)(θ
p-θc)
[0058]
其中,k0(tm)和k1(tm)是泰勒展开的系数;
[0059]
则回波信号表示为:
[0060][0061]
将解耦和后的信号逐距离单元进行一维方位处理,先补偿第一个指数项的常数相位k1(tm)是方位采样时间tm的函数;
[0062]
令k1(tm)按距离均匀化插值后得到新的方位角度波数变量同时实现回波相位的关于方位极坐标的线性化;对方位进行傅里叶变换即实现方位(θ
p-θc)处的聚焦。
[0063]
步骤4,建立空间极坐标下的瞬时斜距模型;
[0064]
具体的,极坐标(r
p
,θ
p
)表示的直角坐标为:简写为简写为极坐标(r
p
,θ
p
)表示的旋转角为简写为则瞬时斜距用极坐标表示为:
[0065][0066]
极坐标用数据录取直角坐标系oxyz的直角坐标表示为:
[0067][0068]
其中,n
p
为斜平面所在垂面的法向向量,n
p
=r
p
×
v;nv为速度所在垂面的法向向量,nv=v
×nxy
,其中n
xy
=(0,0,1);为二面角或者说是平面旋转角;r
p
为斜距;θ
p
为斜视角;
[0069]
用与斜距r
p
和斜视角θ
p
三个变量描述点目标的空间位置。
[0070]
为了实现平面成像,点目标在地平面上(即数据录取直角坐标系oxyz中的z坐标为0),仅利用斜距r
p
和斜视角θ
p
两个坐标即式(2)中的前两式成像区域相当于图3中圆柱体与地平面的交面。反推得到用空间极坐标成像坐标系表示的直角坐标为:
[0071][0072]
可以看出为了得到确定解,y的求导需要解一个二次方程,场景参数不同时,根的选择不同,χ是根据已知的场景中心点确定的求根公式中的符号。
[0073]
式(2)和式(3)构成了完整的斜-地转换对应关系,则根据式(1),相应空间极坐标瞬时斜距模型为:
[0074][0075]
可以看出,此斜距模型的求解未引入任何近似。
[0076]
步骤5,求解相应方位极角波数;
[0077]
根据所述空间极坐标瞬时斜距模型,差分斜距r
p
(tm)-rc(tm)关于方位极坐标变量在中心值处的泰勒系数分别为:
[0078][0079][0080]
其中,
[0081][0082]
步骤6,对距离聚焦域-方位时域回波根据高超声速合成孔径雷达方位极角波数均匀化重采样;参考图4,为方位极角波数均匀化重采样原理示意图。
[0083]
步骤7,对方位极角波数均匀化重采样后的回波信号做方位傅里叶变换,得到距离聚焦域-方位聚焦域成像结果。
[0084]
本发明的效果通过以下仿真对比试验进一步说明:
[0085]
1.仿真内容:
[0086]
仿真参数如表1所示:
[0087]
表1
[0088]
参数数值载频17ghz带宽150mhz重频3000hz中心斜距102km高度60km斜视角66.7deg合成孔径时间0.34s速度(800,1500,-500)m/s加速度(40,100,-40)m/s2[0089]
参考图5,设置点目标p1~p4。
[0090]
试验1:使用本发明方法对点目标p1~p4进行成像处理;
[0091]
试验2:使用唐世阳的极径极角算法(radius/angle algorithm,raa)对点目标p1~p4进行成像处理;raa是针对高超声速平台的插值类成像算法,但是基于极径和极角的二维泰勒展开使其斜地投影关系受到波束中心假设的限制,不同点目标的斜距和加速度投影到中心平面的过程中用到了较多的近似,算法在雷达复杂运动航迹下对运动误差敏感。
[0092]
参考图6,为成像点目标在两种方法下的斜距误差对应的相位误差,可以看出相应raa的聚焦效果与斜距误差对应,除场景中心点外的成像质量较差;而本发明方法对点目标的成像质量都很好,这一点从点目标的方位脉冲响应上也可以看出来,点目标聚焦效果也从侧面证明了本发明方法的有效聚焦范围更大。
[0093]
两种方法的成像结果如图7所示,可以看出,本发明方法具有更好的成像效果。
[0094]
对点目标p1~p4在两种方法下的成像质量通过峰值旁瓣比和积分旁瓣比进行量化比较,比较结果如表2所示;
[0095]
表2
[0096][0097]
通过表2可以看出,本发明方法具有更好的成像效果。
[0098]
虽然,本说明书中已经用一般性说明及具体实施方案对本发明作了详尽的描述,但在本发明基础上,可以对之作一些修改或改进,这对本领域技术人员而言是显而易见的。
因此,在不偏离本发明精神的基础上所做的这些修改或改进,均属于本发明要求保护的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。