1.本发明涉及一种清扫机器人以及其的控制方法。
背景技术:
2.随着工业技术的发展,很多装置已被自动化。众所周知,清扫机器人是一种在无人操作的情况下自动移动到需要清洁的区域,从被清洁面吸收灰尘等异物或者擦拭被清洁面的异物,由此自动清洁需要清洁的区域的机器。
3.—般,所述清扫机器人可包括真空清扫机,真空清扫机利用电等的动力源通过吸引力进行清扫。
4.但是,包括所述真空清扫机的清扫机器人无法去除附着在被清洁面的异物或顽固的污渍等,因此最近流行在清扫机器人贴附抹布来执行湿式清洁的清扫机器人。
5.但是,利用通常的清扫机器人进行湿式清洁的方式,仅是在现有的真空清洁用清扫机器人的下面贴附抹布等的单纯的方式,因此具有去除异物的效率低,不能有效执行湿式清洁的缺点。
6.尤其,通常的清扫机器人,其湿式清洁方式是照样利用现有的吸引式真空清扫机的移动方式和避开障碍物的方式等进行行进,因此,仍存在即便去除散落在被清洁面的灰尘等,也不容易去除附着在被清洁面的异物等的问题。
7.在通常的清扫机器人贴附抹布的结构,因抹布面与地面的摩擦力变高,需要更大的推动力来移动轮子,因此,存在电池的消耗增高的问题。
技术实现要素:
8.技术问题
9.本发明是根据上述的必要性而提出的,其目的在于,提供一种通过将多个旋转部件的旋转力用作清扫机器人的移动动力源,并在旋转部件可以固定用于湿式清洁的清洁器,从而,边进行湿式清洁边行进的清扫机器人以及其的控制方法。
10.另外,本发明的目的在于,提供一种包括三个旋转部件,并将其中一个旋转部件用作确定行进方向的手段,从而,对应行进时发生的情况能实现有效的相应动作的清扫机器人以及其的控制方法。
11.解决问题的手段
12.为了达成所述目的,根据本发明的一实施例的清扫机器人,其中,可以包括:主体;驱动部,设置于所述主体,供应用于所述清扫机器人行进的动力;第一旋转部件、第二旋转部件及第三旋转部件,通过所述驱动部的动力,分别以第一旋转轴、第二旋转轴及第三旋转轴为中心进行旋转运动,分别可固定用于湿式清洁被清洁面的清洁器;以及控制部,控制所述第三旋转部件的旋转方向和旋转速度中的至少一个,以调整所述清扫机器人的行进方向,所述第三旋转轴可以平行于所述清扫机器人的垂直方向轴。
13.而且,所述第一旋转轴和所述第二旋转轴可相对于所述中心轴倾斜成预定角度,
使得所述第一旋转部件及所述第二旋转部件以平行于所述清扫机器人的垂直方向轴的中心轴为准向外侧向下倾斜。
14.而且,在所述第一旋转部件和所述第二旋转部件分别固定有用于湿式清洁的清洁器时,作为移动动力源可以利用随着所述被固定的每个清洁器的旋转运动而产生的、所述被清洁面和所述被固定的每个清洁器的摩擦力来行进。
15.而且,所述第一旋转轴及所述第二旋转轴以包括所述中心轴的第一平面为准呈对称,所述第三旋转轴可以包括在所述第一平面。
16.而且,所述控制部可以基于施加到所述第一旋转部件和所述第二旋转部件中的至少一个的负载的信息来控制所述第三旋转部件的旋转方向和旋转速度中的至少一个。
17.而且,所述控制部可以将所述第三旋转部件的旋转方向确定在所述第一旋转部件和所述第二旋转部件中,对从所施加的负载的值减参考值的差更大的旋转部件施加的负载的值减小的方向。
18.而且,还可以包括感测部,其设置在所述主体上以检测与外部物体的相邻状态。
19.而且,当所述感测部检测到下降点或与向所述清扫机器人供电的外部充电器的相邻状态时,所述控制部可以控制所述第三旋转部件的旋转方向及旋转速度中的至少一个以使所述清扫机器人原地旋转。
20.而且,当所述感测部检测到与障碍物的相邻状态时,所述控制部可以控制所述第三旋转部件的旋转方向及旋转速度中的至少一个以使所述清扫机器人沿着包括预定的曲率半径的曲线的轨迹避开所述障碍物行进。
21.为了达成所述目的,根据本发明的一实施例的清扫机器人,可以包括:主体;驱动部,设置于所述主体,供应用于所述清扫机器人行进的动力;第一旋转部件、第二旋转部件及第三旋转部件,通过所述驱动部的动力,分别以第一旋转轴、第二旋转轴及第三旋转轴为中心进行旋转运动,分别可固定用于湿式清洁被清洁面的清洁器;以及控制部,控制所述驱动部以调整所述清扫机器人的行进方向,所述第三旋转轴与所述清扫机器人的垂直方向轴所成的角度可以对应所述清扫机器人行进过程中所述被清洁面的形状而变化。
22.而且,所述第一旋转轴和所述第二旋转轴可相对于所述中心轴倾斜成预定角度,使得所述第一旋转部件及所述第二旋转部件以平行于所述清扫机器人的垂直方向轴的中心轴为准向外侧向下倾斜。
23.而且,所述第三旋转部件可朝平行于所述清扫机器人的垂直方向轴的方向滑动。
24.而且,所述控制部可以基于施加到所述第一旋转部件和所述第二旋转部件中的至少一个的负载的信息来控制所述第三旋转部件的旋转方向和旋转速度中的至少一个。
25.而且,还可包括感测部,其设置在所述主体上以检测与外部物体的相邻状态,当所述感测部检测到下降点或与向所述清扫机器人供电的外部充电器的相邻状态时,所述控制部可以控制所述第三旋转部件的旋转方向及旋转速度中的至少一个以使所述清扫机器人原地旋转。
26.为了达成所述目的,根据本发明的一实施例的清扫机器人的控制方法,所述方法将可附着用于湿式清洁被清洁面的清洁器的多个旋转部件的旋转力作为用于行进的移动动力源而使用,其中,可包括:旋转以第一旋转轴为中心进行旋转运动的第一旋转部件和以第二旋转轴为中心进行旋转动的第二旋转部件中的至少一个,来使所述清扫机器人行进的
步骤;以及响应于在所述行进步骤中检测到的所述清扫机器人的状态事件,控制以第三旋转轴为中心进行旋转运动的第三旋转部件的旋转方向和旋转速度中的至少一个,来调整所述清扫机器人的行进方向的步骤,所述第三旋转轴平行于所述清扫机器人的垂直方向轴,或者所述第三旋转部件的固定有清洁器的面在所述清扫机器人的行进过程中平行于所述被清洁面。
27.而且,所述行进的步骤可以包括检测施加到所述第一旋转部件和所述第二旋转部件中的至少一个的负载的步骤,所述调整行进方向的步骤中可以控制所述第三旋转部件的旋转方向和旋转速度中的至少一个,使得在发生所述检测到的负载脱离容纳范围的事件时,使所述负载返回所述容纳范围内。
28.而且,所述行进的步骤可以包括检测与外部物体的相邻状态的步骤,调整所述行进方向的步骤中可以控制所述第三旋转部件的旋转方向和旋转速度中的至少一个,使得在所述检测步骤中,发生检测到下降点或与向所述清扫机器人供电的外部充电器的相邻状态的事件时,使所述清扫机器人原地旋转。
29.而且,所述行进的步骤可包括检测与外部物体的相邻状态的步骤,所述检测步骤中,发生检测到与障碍物的相邻状态的事件时,可以控制所述第三旋转部件的旋转方向和旋转速度中的至少一个,使得所述清扫机器人沿着包括预定的曲率半径的曲线的轨迹避开所述障碍物行进。
30.发明效果
31.根据本发明的各种实施例,清扫机器人通过将多个旋转部件的旋转力用作移动动力源,从而,可以进行湿式清洁的同时进行行进。
32.另外,根据本发明的各种实施例,清扫机器人通过将多个旋转部件的旋转力用作移动动力源,从而,可以改善电池的效率。
33.另外,根据本发明的各种实施例,清扫机器人通过具备三个旋转部件,可以去除清扫的盲区。
34.另外,根据本发明的各种实施例,清扫机器人通过将三个旋转部件中的一个用作确定行进方向的手段,从而,对应行进时发生的情况能实现有效的相应动作。
附图说明
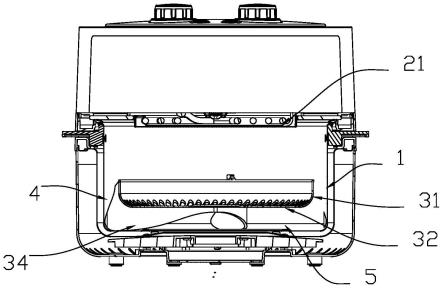
35.图1是示出根据本发明的一实施例的清扫机器人的外观的立体图及主视图。
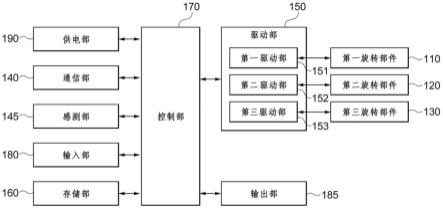
36.图2是示出根据本发明的一实施例的清扫机器人的框图。
37.图3是示出根据本发明的一实施例的清扫机器人的外观的右侧视图及后视图。
38.图4是示出根据本发明的一实施例的清扫机器人的行进动作的图。
39.图5是示出根据本发明的一实施例的清扫机器人的旋转动作的图。
40.图6是示出根据本发明的一实施例的清扫机器人的驱动部的外形及布置的图。
41.图7是示出根据本发明的一实施例的清扫机器人的感测部的布置的图。
42.图8是示出根据本发明的一实施例的清扫机器人的感测部的动作的图。
43.图9是示出根据本发明的一实施例的清扫机器人的下降点避开动作的图。
44.图10是示出根据本发明的一实施例的外部充电器及其充电动作的图。
45.图11是示出根据本发明的一实施例的清扫机器人的障碍物避开动作的图。
46.图12是示出根据本发明的一实施例的第三旋转部件的动作的图。
47.图13是示出根据本发明的一实施例的清扫机器人的控制方法的流程图。
具体实施方式
48.以下内容只是举例说明本发明的原理而已。因此,虽未在本说明书中明确地说明或图示,但是,本发明所属领域的技术人员可以发明体现本发明的原理并包含于本发明的概念及范围的多样的装置。而且,本说明书所举出的所有条件部术语及实施例原则上明确地理解本发明的概念而提供的,因此,应理解为本发明并不局限于特别列出的实施例及状态。
49.并且,应理解为不仅是本发明的原理、观点及实施例,而且对特定实施例的所有详细说明皆包含所述事项的结构及功能性均等物。并且,应理解所述均等物包含除目前所公知的均等物之外与其结构无关具有相同的功能的将来要发明的所有元件。
50.例如,应理解本说明书的框图表示具体说明本发明的原理的例示电路的概念的观点。类似地,所有流程图、状态变换图、伪编码等实际上能通过计算机可读存储介质体现,不管是否明确图示计算机或处理器,可表示通过计算机或处理器执行的多样的程序。
51.图示的包含用处理器或类似概念表示的功能框的多样的元件的功能可通过专用硬件、具有能执行软件的能力的硬件提供。通过处理器提供时,所述功能可通过单一的专用处理器、单一的共用处理器或多个单独的处理器提供,其中局部可以共同使用。
52.应解释为在使用处理器、控制或与其类似的概念提示的术语时,不得排他性地引用具有执行软件能力的硬件,暗示地包含用于存储数字信号处理器(dsp)硬件、用于存储软件的rom、ram及非易失性存储器。还可以包含周知的常用的其他的硬件。
53.本说明书的权利要求范围中用于执行详细说明中的功能的组成要素包含执行所有形式的软件的功能的所有方法,例如包含执行所述功能的电路元件的组合或固件/微码等,为了执行所述功能,与用于执行所述软件的适当的电路连接。在由权利要求范围而定义的本发明结合通过所举出的各种手段提供的功能,通过与权利要求范围所请求保护的方式结合,提供所述功能的任何手段都可以从本说明书把握。
54.所述目的、特征及优点通过附图及下面的详细说明将会明确理解。因此,本发明所属领域的技术人员能容易实施本发明的技术思想。并且,在说明本发明时,当判断为对本发明的相关公知技术的具体说明会使本发明的要旨不明确时,省略对其的详细说明。
55.下面,参照附图详细说明本发明的各种实施例。
56.图1是示出根据本发明的一实施例的清扫机器人的外观的立体图及主视图,图2是示出根据本发明的一实施例的清扫机器人的框图。
57.如图1(a)、(b)及图2所示,根据本发明的一实施例的清扫机器人100,可以包括主体10、驱动部150、第一旋转部件110、第二旋转部件120、第三旋转部件130及控制部170而构成。
58.参考图2,根据本发明的实施例的清扫机器人100,可以包括:感测部145、通信部140、存储部160、输入部180、输出部185、供电部190中的至少一个而构成。
59.所述主体10,在结构上,可以为形成清扫机器人100的外观的结构。
60.根据本发明的实施例,在所述主体10的外周可以形成用于从外部冲击保护主体10
的缓冲器(省略图示)。
61.所述驱动部150可以设置在所述主体10以提供用于使所述清扫机器人100行进的电力。
62.第一旋转部件110、第二旋转部件120及第三旋转部件130的每一个可通过所述驱动部150的动力分别以第一旋转轴(rotation axis)310、第二旋转轴(rotation axis)320及第三旋转轴330为中心进行旋转运动。
63.所述驱动部150可以为用于驱动第一旋转部件110、第二旋转部件120及第三旋转部件130的结构。更具体地,驱动部150可以在控制部170的控制下供应用于旋转运动第一旋转部件110、第二旋转部件120及第三旋转部件130的动力。此处,驱动部150可以包括分别驱动所述第一旋转部件110、第二旋转部件120及第三旋转部件130的第一驱动部151、第二驱动部152及第三驱动部153,并且,可以包括马达及/或齿轮组件来实现。
64.在第一旋转部件110、第二旋转部件120及第三旋转部件130可分别固定用于湿式清洁被清洁面900的第一清洁器210、第二清洁器220及第三清洁器230。
65.清扫机器人100可以边使用所述清洁器210、220、230执行湿式清洁边行进。在此,湿式清洁可以是指使用清洁器210、220、230清洁被清洁面900的清扫,例如,可以包括所有的利用干抹布等的清洁、利用被液体浸湿的抹布等的清洁。
66.第一清洁器210、第二清洁器220及第三清洁器230可以由超细纤维布、抹布、无纺布、刷子等能够擦拭各种被清洁面的材料而构成,以便能够通过旋转运动去除粘在地面上的异物。而且,如图1所示,第一清洁器210、第二清洁器220以及第三清洁器230的形态可以为圆形,但不受形态限制,可以由各种形态而实现。
67.而且,第一清洁器210、第二清洁器220及第三清洁器230的固定是可以利用在每个旋转部件110、120、130覆盖的方法或者使用其它贴附手段的方法而执行。例如,第一清洁器210、第二清洁器220及第三清洁器230可以通过尼龙搭扣等而贴附固定在第一固定部件112以及第二固定部件122上。
68.如上所述,根据本发明的实施例的清扫机器人100,第一清洁器210、第二清洁器220及第三清洁器230随着第一旋转部件110、第二旋转部件120及第三旋转部件130的旋转运动而旋转,由此通过与被清洁面900的摩擦而可以去除粘在地面上的异物等。
69.而且,在清洁器210、22、230与被清洁面900之间产生摩擦力时,该摩擦力可以使用为清扫机器人100的移动动力源。
70.更具体而言,根据本发明的一实施例的清扫机器人100可以随着第一旋转部件110以及第二旋转部件120的旋转,而分别与被清洁面900产生摩擦力,然后根据其合力作用的大小以及方向,调整清扫机器人100的移动速度以及方向。
71.所述控制部170可以控制所述驱动部150以使所述清扫机器人向行进方向行进。
72.所述控制部170可以控制所述驱动部150以调整所述清扫机器人100的行进方向。
73.所述控制部170可以控制第一驱动部151和第二驱动部152中的至少一个的旋转方向和旋转速度中的至少一个,以控制清扫机器人100向行进方向行进。
74.感测部145可以感测清扫机器人100的动作所需的各种信息,并将感测信号发送至控制部170。
75.另一方面,通信部140可以包括一个以上的模块,所述模块可以进行清扫机器人
100和其他无线终端之间、或者清扫机器人100和其他无线终端所处的网络之间的无线通信。例如,通信部140可以与作为远程控制设备的无线终端进行通信,为此,可以包括近距离通信模块或者无线网络模块等。
76.清扫机器人100可以通过由如上所述的通信部140接收的控制信号控制动作状态或者动作方式等。作为控制清扫机器人100的终端,例如可以包括可以与清扫机器人100进行通信的智能手机、平板电脑、个人计算机、遥控器(远程控制设备)等。
77.—方面,存储部160可以存储用于执行控制部170的动作的程序,还可以临时存储输出入的数据。存储部160可以包括闪存型(flash memory type)、硬盘型(hard disk type)、微型多媒体卡型(multimedia card memory type)、卡式存储器(例如sd或xd存储器)、ram(random access memory:随机存储器)、sram(static random access memory)、rom(read-only memory:只读存储器)、eepr0m(electrically erasable programmable read-only memory)、pr0mprogrammable read-only memory)、磁存储器、磁盘、光盘中的至少一种类型的存储介质。
78.输入部180可以接收用于操作清扫机器人100的使用者的输入。尤其,输入部180可以接收选择清扫机器人100的动作模式的使用者输入。
79.此处,输入部180可由键盘(key pad)锅仔片(dome switch)、触控板(常压/静电)、滚轮(jog wheel)、滚轮开关等构成。
80.输出部185用于产生与视觉、听觉等相关的输出,虽省略图示,可以包括显示部、语音输出模块以及提醒部等。
81.显示部显示(输出)清扫机器人100处理的信息。例如,可以显示用户界面(user interface,ui)或者图形用户界面(graphic user interface,gui),所述用户界面或者图形用户界面在清扫机器人清洁时显示与清洁模式相关的清洁时间、清洁方法、清洁区域等。
82.供电部190向清扫机器人100供电。具体而言,供电部190向构成清扫机器人100的各个功能部供电,当电源剩余量不足时,可以从外部充电器191供应得到充电电流进行充电。此处,供电部190可以由可充电的电池构成。
83.图3是示出根据本发明的一实施例的清扫机器人的外观的右侧视图及后视图。
84.如图3(b)所示,在根据本发明的一实施例的清扫机器人100中,所述第一旋转轴310和所述第二旋转轴320可以相对于所述中心轴300倾斜预定角度,使得所述第一旋转部件110和所述第二旋转部件120以平行于所述清扫机器人100的垂直方向轴的中心轴300为准向外侧向下倾斜(图3(b)的“θ”)。
85.根据本发明的一实施例,所述第三旋转轴330可以平行于所述清扫机器人100的垂直方向轴。
86.所述“平行”和“要平行”的含义可以意味着“基本上或在误差范围内平行”以及“基本上或者在误差范围内要平行”。本说明书中其他地方的“平行”及“要平行”的含义也相同。
87.根据本发明的一实施例,所述第三旋转部件130在所述清扫机器人100上设置在所述第一旋转部件110和第二旋转部件120的后方,在向前行进时,可以从后面跟踪所述第一旋转部件110和所述第二旋转部件120。
88.根据本发明的其他实施例,所述第三旋转部件130在清扫机器人100中设置在所述第一旋转部件110和所述第二旋转部件120的前方,在向前行进时,可以在前面引导所述第
一旋转部件110所述第二旋转部件120。
89.在所述旋转部件110、120、130分别附着清洁器210、220、230时,在清扫机器人100行进的过程中,附着在所述第三旋转部件130的第三清洁器230可以清洁被清洁面900中所述第一清洁器210和所述第二清洁器220的中间部分经过而未很好地清洁的区域。由此,可以解决清洁的盲区。
90.根据本发明的一实施例,所述第一旋转轴310及所述第二旋转轴320以包括所述中心轴300的平面(省略图示)为准呈对称,所述第三旋转轴330可以包含在所述平面中(省略图示)。
91.上述的“对称”及“包含在平面”的含义也可以意味着基本上或者在误差范围内的“对称”及“包含在平面”。下面,在本说明书中可以以相同的含义使用。
92.图4是示出根据本发明的一实施例的清扫机器人的行进动作的图。
93.在根据本发明的一实施例的清扫机器人10中,在所述第一旋转部件110和所述第二旋转部件120分别固定有用于湿式清洁的清洁器210、220时,可以利用随着所述被固定的每一个清洁器210、220的旋转运动而产生的、所述被清洁面900和所述被固定的清洁器210、220的每一个的摩擦力作为移动动力源进行行进。
94.参考图4,根据本发明的一实施例的清扫机器人100,通过使第一旋转部件110朝第一方向旋转,并使第二旋转部件120朝与所述第一方向不同的第二方向旋转,从而,可以产生由摩擦力而产生的相对移动力,并朝行进方向行进。
95.在使所述第三旋转部件130旋转的同时实现清扫机器人100的直线行进的情况下,使所述第一旋转部件110和所述第二旋转部件120的旋转方向相反,并使旋转速度不同,因其相差而引起的所述主体10的旋转效果,可以通过所述第三旋转部件130的旋转来补偿和消除。
96.在一实施例中,可以控制为所述第一旋转部件110以x的速度朝逆时针方向旋转,所述第二旋转部件120以ax的速度朝顺时针方向旋转(此处,0.5≤a《1),所述第三旋转部件130以(1-a)x的速度朝顺时针方向旋转,从而,保持左右平衡。所述x可以不是驱动部150可以达到的最高速度,并且可以根据在驱动部150中的旋转马达(省略图示)的规格进行调整。另外,所述值0.5也不是绝对恒定的,可以改变为小于1的任意值。
97.此外,可根据需要,加减所述第三旋转部件130的旋转速度,来防止在清扫机器人100行进时产生的摇摆(sway)现象。
98.作为其他另一实施例,可以将所述第三旋转部件130的旋转速度固定为ax(此处,0《a《1),并且,根据由惯性测量装置(省略图示)测量的信息,决定所述第一旋转部件110和所述第二旋转部件120的旋转速度。所述第一旋转部件110和所述第二旋转部件120的旋转方向彼此相反。在这种情况下,在将第一旋转部件110和第二旋转部件120中旋转方向与第三旋转部件130相反的旋转部件的旋转速度设为x时,将另一个旋转部件的旋转速度可以设为x(1-α)。
99.此外,所述其他旋转部件的旋转速度可以基于所述惯性测量装置(省略图示)的测量值来增减,以防在清扫机器人100的行进过程中产生的摇摆现象。
100.根据本发明的一实施例,所述控制部170可以控制所述第三旋转部件130的旋转方向和旋转速度中的至少一个,来调整所述清扫机器人100的行进方向。
101.图5是示出根据本发明的一实施例的清扫机器人的旋转动作的图。
102.如图5(a)所示,当所述第一旋转部件110、所述第二旋转部件120及第三旋转部件130都朝相同的方向(在图5(a)的情况下,为ccw方向)旋转时,所述清扫机器人100的主体10,整体上因反作用朝相反方向旋转。在这种情况下,根据第三旋转部件130的旋转速度,所述主体10的旋转中心(图5(a)中的)可以在所述旋转部件110、120、120的旋转过程中移动。
103.图5(b)示出所述第三旋转部件130朝与所述第一旋转部件110和所述第二旋转部件120不同的方向(图5(b)的情况下,为cw方向)旋转的情况。在这种情况下,所述主体10的旋转中心(图5(b)中的)可以在所述旋转部件110、120、130的旋转过程中移动。然而,其移动的速度及其移动量与所述第一旋转部件110、所述第二旋转部件120及第三旋转部件130都朝相同的方向旋转时相比更大。
104.可根据上述原理,所述控制部170控制所述第三旋转部件130的旋转方向和旋转速度中的至少一个,来调整所述清扫机器人100的行进方向。
105.所述感测部145可以包括用于测量所述清扫机器人10的加速度和角速度中的至少一个的测量部(省略图示)。更具体地,所述感测部145可以包括惯性测量装置(inertial measurement unit;imu)(省略图示)。惯性测量装置(省略图示)可以是指基于传感器测量移动体的速度、方向、重力、加速度的装置,并且,在内部可以安装有三轴加速度计及三轴角加速度计。
106.所述控制部170基于由所述测量部(省略图示)检测到的所述清扫机器人10的加速度和角速度中的至少一个,来控制所述第三旋转部件130的旋转方向和旋转速度中的至少一个,从而,可以调整所述清扫机器人100的行进方向。
107.根据本发明的一实施例,控制部170使用所述惯性测量装置(省略图示)的检测值来检测所述主体10的旋转中心的变化量,并基于此控制所述驱动部150来改变所述旋转部件130的旋转速度,从而,使所述旋转中心固定在预定位置,或者可以控制所述驱动部150来使所述旋转中心跟踪特定轨迹移动。
108.当所述清扫机器人100原地旋转时,通过所述惯性测量装置(省略图示)的测量值感测主体10的旋转角度和旋转中心的变化,并且,当主体10的旋转中心从主体10的中心脱离时,通过加减第三旋转部件130的速度来保持所述旋转中心与主体10的中心一致。
109.所述控制部170可以基于施加到所述第一旋转部件110和所述第二旋转部件120中的至少一个的负载的信息,来控制所述第三旋转部件130的旋转方向和旋转速度中的至少一个。
110.所述负载可能由随着所述第一旋转部件110和所述第二旋转部件120的旋转,固定在每个旋转部件的清洁器210、220和被清洁面900之间的摩擦而产生。尤其,在被清洁面900具有坡度或者不平坦而摩擦系数变化时,所述负载可能会增加或减少。
111.或者,所述负载还可能由于与清扫机器人100的机械部分的动作状态或性能相关的其他原因而产生。
112.当分别施加到所述第一旋转部件110和所述第二旋转部件120的负载不均匀时,控制所述第一旋转部件110和所述第二旋转部件120的旋转速度的性能可能会降低。这可能会导致清扫机器人100无法跟踪行进路径而无法正确地执行直线行进或脱离清洁区域的问
题。
113.另外,当施加到所述第一旋转部件110和所述第二旋转部件120中的一个的负载过大时,可能会在旋转速度(旋转数)的反馈控制中引起严重的问题,引起旋转速度的振动等。在极端的情况下,可能会发生所述驱动部150的马达的寿命缩短或者损坏的风险。
114.因此,防止发生这种不均匀或过大的负载可以帮助提高行进及清洁性能。
115.根据本发明的一实施例,所述施加的负载的信息包括在所述驱动部150,可以从对用于产生使所述第一旋转部件110和所述第二旋转部件120旋转的动力的旋转马达(省略图示)输入的控制值中获取。在一实施例中,所述控制值可以为pwm信号的占空比(duty rate)。或者,可以为可变电压值。
116.根据本发明的其他实施例,所述施加的负载的信息可以从所述旋转马达(省略图示)或其驱动电路输出的电流或功率值获得。
117.根据本发明的其他另一实施例,所述施加的负载的信息可通过运算过程从由所述惯性测量装置(省略图示)测量的加速度、角速度以及所述第一旋转部件110和所述第二旋转部件120的旋转数(旋转速度)获得。即可以基于在各种负载测试条件下匹配所述第一旋转部件110和所述第二旋转部件120的旋转数(旋转速度)与清扫机器人110的加速度和角速度的表格或公式,在实际行进环境中运算所述负载。
118.为了实现如上所述的各种实施例,所述感测部145可以包括:可以测量加速度及角速度的惯性测量装置(省略图示)、用于检测所述第一旋转部件110和所述第二旋转部件120或对应于这些旋转部件的旋转马达(省略图示)的旋转数的编码器、以及用于检测所述旋转马达(省略图示)的输入控制值或输出电流(功率)的检测装置中的至少一个。
119.所述控制部170将所述第三旋转部件130的旋转方向确定在所述第一旋转部件110和所述第二旋转部件120中,对从所施加的负载的值减参考值的差更大的旋转部件施加的负载的值减小的方向。
120.进而,可以基于所述差的大小来决定所述第三旋转部件130的旋转速度。
121.如上所述,通过基于所述差的大小来决定所述第三旋转部件130的旋转方向及旋转速度,从而,可以解决施加到所述第一旋转部件110和所述第二旋转部件120上的负载不均匀,提高旋转速度控制性能。
122.图6是示出根据本发明的一实施例的清扫机器人的驱动部的外观和布置的图。
123.更具体地,图6(a)是示出驱动部150的外形的图,i是左侧视图,ii是俯视图,iii是主视图,iv是仰视图。
124.如图6(a)的i、iii所示,所述驱动部150,作为一构成要素,在上下部都可以具备离合器155,用于将动力传递到所述旋转部件110、120、130。因此,即使上下倒置根据本发明的一实施例的驱动部150的情况下,也可以将动力传递给旋转部件110、120、130。
125.图6(b)是示出驱动部150中包括的第一驱动部151、第二驱动部152及第三驱动部153设置在主体10上的状态的图。如图6(b)所示,所述第一驱动部151、第二驱动部152及第三驱动部153中的一个以与另外两个相反的状态设置在所述主体10上。
126.通过这种设置结构,在主体10的中央部可以确保更宽的能设置其他的功能部件的设置空间。这使得可以将主体10的外形设计成纤细或者为了维修而容易拆卸和组装的结构。
127.图7是示出根据本发明的一实施例的清扫机器人的感测部的布置的图。
128.所述感测部145可以设置在所述主体10上。此外,可以检测与外部物体的相邻状态。
129.更具体地,所述感测部145可以包括传感器,所述传感器用于感测与位于所述清扫机器人100的前方、侧方、上方及下方中的至少一个的物体之间的距离。
130.用于感测所述前方的传感器(省略图示)可用于感测前方的障碍物。根据实施例,可以为ir传感器。然而,本发明不限于此,根据实施例,可以为超声波传感器、激光传感器等的各种传感器。
131.用于感测所述上方向的传感器146可用于感测上面的障碍物。根据一实施例,可以为ir传感器。然而,本发明不限于此,根据实施例,可以为超声波传感器、激光传感器等的各种传感器。
132.如上所述的ir传感器可以检测在tx、rx重叠区域内是否存在障碍物。
133.用于感测所述下方的传感器147可用于检测下降点810。根据本发明的一实施例,可以为tof(tim-of-flight)传感器。tof是指通过测量向被摄体发射的光源反射而来的时间来计算距离的技术。
134.图8是示出根据本发明的一实施例的清扫机器人的感测部的动作的图。如图8的(a)及(b)所示,在本发明的一实施例中,用于感测所述下方的传感器147,在所述清扫机器人100的主体10前面的左右两侧区域被布置成感测方向分别向左右外侧偏转预定角度,面向地板设置,从而,可以有效地检测下降点810。所述预定角度,优选在20度至45度的范围内选择。更优选为30度。
135.用于感测所述侧方的传感器148可以用于检测在清扫机器人100爬墙及避开前方障碍物行进时是否通过障碍物等,根据本发明的一实施例,可以为tof(tim-of-flight)传感器。
136.如图8的(a)及(b)所示,在本发明的一实施例中,用于感测所述侧方的传感器,在所述清扫机器人100的主体10的左右侧面中的至少一个,可以设置成感测方向向所述清扫机器人100的前方偏转预定角度。所述预定角度,优选在10度至20度的范围内选择。更优选为15度。
137.优选地,当所述清扫机器人100在墙壁的右侧爬墙时,用于感测前方的传感器优选设置在所述主体10的右侧。
138.所述感测部145可以包括接收部149,所述接收部149接收从外部充电器(支架)191发送的无线信号。所述接收部149可以安装在所述主体10的与所述外部充电器191的发送部(省略图示)相同的高度。此外,可以设置在所述主体10的前面、左右侧面及后面中的至少一个上,检测出所述清扫机器人100已到达能够对接所述无线充电器的位置。
139.图9是示出根据本发明的一实施例的清扫机器人的下降点避开动作的图。
140.在朝特定行进方向行进的过程中(参考图10(a)),所述感测部145检测到与下降点810的相邻状态(参考图10(b))时,所述控制部170可以控制所述第三旋转部件130的旋转方向和旋转速度中的至少一个,使得所述清扫机器人100原地旋转(参考图10(c))。然后,所述控制部170可以向位置改变的所述清扫机器人100的前方行进。
141.当达到如上所述的下降点时,可以进行旋转以改变所述清扫机器人100的行进方
向。在这种情况下,当旋转半径大时,会发生所述清扫机器人可能会掉落的事故。因此,优选地,所述控制部170控制所述第三旋转部件130的旋转方向和旋转速度中的至少一个,使得所述清扫机器人100原地旋转。
142.图10是示出根据本发明的一实施例的外部充电器及其充电动作的图。
143.在朝特定行进方向行进的过程中,所述感测部145检测到与向所述清扫机器人100供电的外部充电器191(参考图10(a))的相邻状态时,所述控制部170可以控制所述第三旋转部件130的旋转方向和旋转速度中的至少一个,使得所述清扫机器人100原地旋转。然后,所述控制部170可以将形成在所述清扫机器人100的前方的、供电部190的电极192朝向所述外部充电器191以使所述清扫机器人100行进,从而,可以使所述电极192对接至外部充电器191(参考图10(b))。
144.如图10(a)及(b)所示,所述外部充电器191可以包括在清扫机器人100连接进行充电的过程中,可以支撑主体10的旋转部件110、120、130中的至少一个的下表面的结构的板192。
145.优选地,所述板192,在充电过程中,可以支撑所有旋转部件110、120、130的下表面。
146.通过上述的板192的结构,即使构成被清洁面的地板材料是长期易受潮的材料,例如木材,也可以充电而不必担心损坏地板材料。
147.根据一实施例,所述板192可以从所述外部充电器的主体部193拆装。
148.此外,根据一实施例,所述板192可以形成为薄膜形态。藉此,即使不另外增加车轮等结构,也可以通过利用分别固定有清洁器210、220、230的旋转部件110、120、130进行行进,从而,在所述板192的上面可容易安装所述清扫机器人100。
149.图11是示出根据本发明的一实施例的清扫机器人的障碍物避开动作的图。
150.当所述感测部145检测到与障碍物800的相邻状态时,所述控制部170可以控制所述第三旋转部件130的旋转方向及旋转速度中的至少一个,使得所述清扫机器人100沿着包括预定的曲率半径的曲线的轨迹820避开所述障碍物800行进。所述预定的曲率半径可以基于如所述清扫机器人100的体积或质量等的结构物性值或者所述驱动部100的旋转马达(省略图示)的规格而设定,以防止或最小化所述清扫机器人100的行进速度的降低。
151.藉此,当感测到前方的障碍物800时,可以以平稳的行进轨迹避开障碍物800。
152.根据一实施例,通过如下控制;即所述第二旋转部件120以x的速度旋转,所述第一旋转部件110以bx(0《b《0.5)的旋转速度减速,所述第三旋转部件130以(b 0.5)的速度朝与所述第二旋转部件120相同的方向旋转,从而,可以产生使用sway现象的平滑的避开轨迹。在这种情况下,可以实现机械上不可见的动态运动。所述0.5的值不是绝对恒定的值,可以改变设置为任何一个小于1的值。
153.作为参考,在现有技术的清扫机器人的情况下,在行进过程中从感测到障碍物的第一位置开始减速移动到更靠近障碍物的第二位置后停止,然后进行原地旋转(避开行动)以进行避开行进。
154.图12是示出根据本发明的一实施例的第三旋转部件的动作的图。
155.如图12(a)所示,所述清扫机器人100的第三旋转轴330与所述清扫机器人100的垂直轴所成的角度可对应于在所述清扫机器人100的行进过程中的所述被清洁面900的形状
而变化。
156.在本发明的一实施例中,所述第三旋转部件130可以包括万向接头(省略图示)或包括可弯曲动作的柔性材料的动力传递部件131。
157.并且,如图12(b)所示,所述第三旋转部件130可以朝平行于所述清扫机器人100的垂直方向轴的方向滑动。根据一实施例,可以采用具有活塞-缸(省略图示)或与其类似的滑动引导结构的动力传递部件131。此外,优选具备用于限制所述活塞-缸的相对运动的卡止突起(省略图示)。
158.另外,即便不具备所述万向接头(省略图示),也可以利用所述滑动引导结构来实现第三旋转轴330的角度改变功能。在这种情况下,所述滑动引导结构,包括:用于传递动力的离合器155;以及与所述离合器150接触可联动旋转的引导件(省略图示),优选在所述离合器155和引导件的内壁之间形成水平方向的间隙(gap)来实现水平方向移动。
159.如此,通过构成为第三旋转部件130沿着被清洁面900的倾斜度移动的形态,从而,可以使摩擦力均匀地分布在固定到所述第三旋转部件130的清洁器330的前面,并提高所述清扫机器人100的直线行进性。
160.在其他另一实施例中,可以被构成为所述第三旋转轴330的角度和所述第三旋转部件130的上下位置相对于所述主体10永久地或可变地固定。然而,在这种情况下,受所述被清洁面900的倾斜度变化的影响很大,并且,根据所述第三旋转部件130的旋转方向,在所述清扫机器人100的行进过程中会发生sway现象。然而,在这种情况下,可以成为有效减小施加到第一旋转部件110或第二旋转部件120的负载的结构。尤其,可以更有效地减小第一旋转部件110或第二旋转部件120中与所述第三旋转部件130向相同的方向旋转的部件的负载。
161.图13是示出根据本发明的一实施例的清扫机器人的控制方法的流程图。
162.如图13所示,根据本发明的一实施例的清扫机器人100的控制方法,所述方法将可附着用于湿式清洁被清洁面900的清洁器的多个旋转部件的旋转力作为用于行进的移动动力源,可以包括旋转以第一旋转轴310为中心进行旋转运动的第一旋转部件110和以第二旋转轴320为中心进行旋转动的第二旋转部件120中的至少一个来使所述清扫机器人100行进的步骤(s100)。
163.而且,响应于在所述行进步骤中检测到的所述清扫机器人100的状态事件,控制以第三旋转轴330为中心进行旋转运动的第三旋转部件130的旋转方向和旋转速度中的至少一个,来调整所述清扫机器人100的行进方向的步骤(s200)。
164.根据本发明的一实施例,所述清扫机器人100中,所述第三旋转轴330可以平行于所述清扫机器人100的垂直方向轴。
165.根据本发明的一实施例,所述第三旋转部件130的固定有清洁器230的面在所述清扫机器人100行进的过程中可以与所述被清洁面900平行。
166.另外,所述行进的步骤(s100),可以包括检测施加到所述第一旋转部件110和所述第二旋转部件120中的至少一个的负载的步骤(s110)。
167.调整所述行进方向的步骤(s200)中,可以控制所述第三旋转部件130的旋转方向和旋转速度中的至少一个,使得在发生所述检测到的负载脱离容纳范围的事件时,所述负载返回所述容纳范围内。
168.所述行进的步骤(s100),可以包括检测与外部物体的相邻状态的步骤(s120)。
169.调整所述行进方向的步骤(s200)中,可以控制所述第三旋转部件130的旋转方向和旋转速度中的至少一个,使得在所述检测步骤中发生检测到下降点810或与向所述清扫机器人100供电的外部充电器191的相邻状态的事件时,使所述清扫机器人100原地旋转。
170.所述行进的步骤(s100),可以包括检测与外部物体的相邻状态的步骤(s120)。
171.在所述检测步骤(s120)中发生检测到与障碍物800的相邻状态的事件时,控制所述第三旋转部件130的旋转方向和旋转速度中的至少一个,使得所述清扫机器人100沿着包括预定的曲率半径的曲线的轨迹820避开所述障碍物800行进。
172.—方面,根据本发明的各种实施例的控制方法可以利用程序编码体现,以存储在多样的非暂时性计算机可读介质(non-transitory computer readable medium)的状态提供到各服务器或设备。
173.非暂时性计算机可读介质半永久性地存储数据,并不是如寄存器、高速缓冲存储器、存储器等短时间存储数据,是可通过设备读取(reading)的介质。具体而言,所述各种应用或程序可以存储于cd、dvd、硬盘、蓝光光盘、usb、内存卡、rom等非暂时性计算机可读介质中。
174.以上,图示说明了本发明的优选实施例,但本发明并不限定于上述特定的实施例,本发明所属领域的技术人员可在本发明的权利要求范围内进行多样的变形实施,这样的变形例不得由技术思想或前景单独地理解。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。