1.本发明涉及通过两个逆变器来驱动控制具有开路绕组的旋转电机的旋转电机控制装置。
背景技术:
2.在由v.oleschuk等人在2007年发表的ieee的论文“dual inverter-fed traction drive with dc sources power balancing based on synchronized pwm”中,公开了一种控制装置,该控制装置对在3相交流型的旋转电机所具有的3相开路绕组的两端分别具有一个的逆变器进行开关控制来驱动控制旋转电机。另一方面,具有如下公知的方式:例如,对设置于与3相绕组各自的一端侧连接的y型绕组的另一端侧的一个逆变器进行开关控制来驱动控制旋转电机。在使用了开路绕组和两个逆变器的系统中,与使用了y型绕组和一个逆变器的系统相比,若直流的电压相同,则能够使绕组的交流电压的线电压变高,从而能够使旋转电机以更高的输出进行动作。
3.在v.oleschuk等人的论文的前言(introduction)中记载有,通过使生成用于对两个逆变器进行开关控制的脉冲的载波信号的相位彼此不同,能够降低在绕组中流动的电流的纹波(ripple)的大小。v.oleschuk等人还指出,通过以同步方式而并不是以使用了载波信号的异步方式来生成脉冲,能够进行更适合于中/高输出的应用的控制。但是,在异步方式、同步方式中的任意方式中,两个逆变器始终以相同的控制方式进行开关控制。
4.现有技术文献
5.非专利文献
6.非专利文献1:v.oleschuk,r.bojoi,g.griva,f.profumo,“dual inverter-fed traction drive with dc sources power balancing based on synchronized pwm”,conference paper/june 2007,1-4244-0743-5/07,ieee,p.260-265。
技术实现要素:
7.优选地,开关控制的方式根据旋转电机所要求的扭矩、转速、直流侧的电压等各种要素(动作条件)来确定,以能够进行更高的系统效率的动作。v.oleschuk等人的技术是优秀的,但在适当地控制在开路绕组的两端分别具有的两个逆变器方面,还存在改善的余地。
8.鉴于上述背景,期望提供一种适当地控制在开路绕组的两端分别具有的两个逆变器的技术。
9.鉴于上述的作为一个方式的旋转电机控制装置,通过第一逆变器以及第二逆变器来驱动控制具有相互独立的多相开路绕组的旋转电机,其中,所述第一逆变器与所述多相开路绕组的一端侧连接,在直流与多相交流之间转换电力,所述第二逆变器与所述多相开路绕组的另一端侧连接,在直流与多相交流之间转换电力,所述第一逆变器和所述第二逆变器分别能够通过开关模式不同的多个控制方式进行控制,并且能够以相互独立的所述控制方式进行控制,作为所述旋转电机的控制区域,设定有第一速度区域和在相同的扭矩下
所述旋转电机的转速高于所述第一速度区域的第二速度区域,所述控制方式包括:脉冲宽度调制控制,在电角度的一个周期中输出模式不同的多个脉冲;以及混合脉冲宽度调制控制,进行控制以在电角度的1/2周期即第一期间中输出模式不同的多个脉冲,在剩余的1/2周期即第二期间中持续非有效状态,在所述第二速度区域中,通过所述混合脉冲宽度调制控制来控制所述第一逆变器以及所述第二逆变器这两个逆变器。
10.混合脉冲宽度调制控制是在电角度的每一个周期的期间内的大致半个周期将进行脉冲宽度调制的期间和无调制(固定状态)的期间组合的控制方式。即,由于逆变器在驱动时间的大致1/2的期间中不进行开关动作,因此能降低开关损耗,从而能降低系统损耗。执行混合脉冲宽度调制控制的第二速度区域在相同的扭矩下设定在比第一速度区域更靠高速度侧,并且是相对中速度/高速度侧的控制区域。根据本结构,在旋转电机的全部动作区域中,通过降低相对中速度/高速度侧的控制区域中的系统损耗,从而能够降低全部动作区域中的整体的系统损耗。这样,根据本结构,能够适当地控制在开路绕组的两端分别具有的两个逆变器。
11.另外,鉴于上述的作为另一个方式的旋转电机控制装置,通过第一逆变器以及第二逆变器来驱动控制具有相互独立的多相开路绕组的旋转电机,其中,所述第一逆变器与所述多相开路绕组的一端侧连接,在直流与多相交流之间转换电力,所述第二逆变器与所述多相开路绕组的另一端侧连接,在直流与多相交流之间转换电力,在所述第一逆变器以及所述第二逆变器中,交流1相的臂分别由上级侧开关元件和下级侧开关元件的串联电路构成,作为所述第一逆变器以及所述第二逆变器的控制方式至少具有:脉冲宽度调制控制,在电角度的一个周期中输出模式不同的多个脉冲;以及主动短路控制,将多相的全部的所述臂的所述上级侧开关元件设为接通状态或者将多相的全部的所述臂的所述下级侧开关元件设为接通状态,并且,在所述脉冲宽度调制控制中,作为所述控制方式包括有:连续脉冲宽度调制控制,对多相的全部的所述臂连续地进行脉冲宽度调制;以及不连续脉冲宽度调制控制,对多相的一部分的所述臂,包含将开关元件固定为接通状态或者断开状态的期间地进行脉冲宽度调制,所述第一逆变器和所述第二逆变器分别能够以相互独立的所述控制方式进行控制,作为所述旋转电机的控制区域设定有:第一速度区域;第二速度区域,在相同的扭矩下所述旋转电机的转速高于所述第一速度区域;以及第三速度区域,在相同的扭矩下所述旋转电机的转速高于所述第二速度区域,在所述第一速度区域中,通过所述主动短路控制来控制所述第一逆变器以及所述第二逆变器中的一个逆变器,并且通过所述连续脉冲宽度调制控制来控制另一个所述逆变器,在所述第二速度区域中,通过所述主动短路控制来控制所述第一逆变器以及所述第二逆变器中的一个所述逆变器,并且通过所述不连续脉冲宽度调制控制来控制另一个所述逆变器,在所述第三速度区域中,执行通过所述不连续脉冲宽度调制控制来控制所述第一逆变器以及所述第二逆变器这两个所述逆变器的对象控制。
12.如本结构那样,在具有两个逆变器的情况下,能够生成比各个逆变器的直流侧的电压更大的振幅的交流电压。但是,旋转电机控制装置不需要始终以交流的振幅变大的方式控制两个逆变器,例如在旋转电机的转速为低速的情况下,存在只要生成能够由一个逆变器能够生成的交流电压就足够的情况。根据本结构,在第一速度区域以及第二速度区域中,通过主动短路控制来控制两个逆变器中的一个逆变器。由此,开路绕组彼此在该一个逆
变器中被短路,旋转电机与定子线圈具有电中性点的旋转电机相同。即,实质上仅由两个逆变器中的一个逆变器驱动旋转电机。由于通过主动短路控制被控制的逆变器不进行开关动作,因此能够在抑制系统整体损耗的同时驱动旋转电机。另外,在第二速度区域中执行的不连续脉冲宽度调制控制的最大调制率大于在第一速度区域中执行的连续脉冲宽度调制控制的最大调制率。第二速度区域是在相同的扭矩下旋转电机的转速高于第一速度区域的控制区域,从系统效率的观点来看,优选在第二速度区域中以比第一速度区域的调制率更高的调制率进行调制。通过在第一速度区域中执行连续脉冲宽度调制控制,在第二速度区域中执行不连续脉冲宽度调制控制,从而能够在将第一速度区域和第二速度区域合并起来的控制区域中,通过一个逆变器适当地驱动旋转电机。另外,由于在旋转电机的转速高于第二速度区域的第三速度区域中,通过不连续脉冲宽度调制控制来控制两个逆变器,因此,在开路绕组中,能够产生比由一个直流电源能够生成的电压高的线电压来驱动旋转电机。这样,根据本结构,能够适当地控制在开路绕组的两端分别具有的两个逆变器。
13.通过参照附图说明的实施方式的以下的记载,使得旋转电机控制装置的其他特征和优点变得明确。
附图说明
14.图1是旋转电机驱动系统的示意性的框图。
15.图2是旋转电机控制装置的简易的部分框图。
16.图3是使用两个逆变器的旋转电机驱动系统的矢量图。
17.图4是旋转电机在正交矢量空间中的示意性的电压矢量图。
18.图5是表示旋转电机的控制区域的一例的图。
19.图6是表示旋转电机的控制区域的一例的图。
20.图7是表示旋转电机的控制区域的一例的图。
21.图8是表示第二速度区域(低速度侧第二速度区域)中的电压指令以及开关控制信号的一例的波形图。
22.图9是表示高速度侧第二速度区域中的电压指令以及开关控制信号的例子的波形图。
23.图10是表示第二速度区域(低速度侧第二速度区域)中的电压指令以及开关控制信号的其他例子的波形图。
24.图11是表示高速度侧第二速度区域中的电压指令以及开关控制信号的其他例子的波形图。
25.图12是表示第一速度区域(低速度侧第一速度区域)中的电压指令以及开关控制信号的一例的波形图。
26.图13是表示高速度侧第一速度区域中的电压指令以及开关控制信号的例子的波形图。
27.图14是表示第三速度区域中的电压指令以及开关控制信号的其他例子的波形图。
28.图15是表示高速度侧第二速度区域中的电压指令以及开关控制信号的其他例子的波形图。
29.图16是表示噪声降低优先模式下的第一速度区域中的电压指令以及开关控制信
号的一例的波形图。
30.图17是表示在第一速度区域中对双逆变器系统的双方的逆变器执行混合连续脉冲宽度调制控制的情况的例子的图。
31.图18是表示在第一速度区域中对双逆变器系统的双方的逆变器执行连续脉冲宽度调制控制的情况的例子的图。
32.图19是表示在第一速度区域中对单逆变器系统执行连续脉冲宽度调制控制的情况的例子的图。
33.图20是表示单逆变器系统的旋转电机的控制区域的一例的图。
34.图21是表示单逆变器系统与双逆变器系统的开关控制信号以及线电压的比较例、双逆变器系统中的不同的控制方式之间的开关控制信号以及线电压的比较例的图。
35.图22是表示单逆变器系统与双逆变器系统的相电流的比较例、双逆变器系统中的不同的控制方式之间的相电流的比较例的图。
36.图23是表示以单逆变器系统与双逆变器系统的相电流的载波频率为中心频率的fft解析结果的比较例、以双逆变器系统中的不同的控制方式之间的相电流的载波频率为中心频率的fft解析结果的比较例的图。
37.图24是表示以单逆变器系统与双逆变器系统的相电流的载波频率的2倍的频率为中心频率的fft解析结果的比较例、以双逆变器系统中的不同的控制方式之间的相电流的载波频率的2倍的频率为中心频率的fft解析结果的比较例的图。
38.图25是表示以单逆变器系统与双逆变器系统的线电压的载波频率为中心频率的fft解析结果的比较例、以双逆变器系统中的不同的控制方式之间的线电压的载波频率为中心频率的fft解析结果的比较例的图。
39.图26是表示以单逆变器系统与双逆变器系统的线电压的载波频率的2倍的频率为中心频率的fft解析结果的比较例、以双逆变器系统中的不同的控制方式之间的线电压的载波频率的2倍的频率为中心频率的fft解析结果的比较例的图。
40.图27是表示比较例的双逆变器系统的旋转电机的控制区域的一例的图。
41.图28是表示单逆变器系统中的执行不连续脉冲宽度调制控制时的波形例以及fft解析结果例的图。
42.图29是表示双逆变器系统中的执行不连续脉冲宽度调制控制时的波形例以及fft解析结果例的图。
43.图30是表示双逆变器系统中的执行混合连续脉冲宽度调制控制时的波形例以及fft解析结果例的图。
44.图31是表示单逆变器系统中的旋转电机的转速与可听噪声之间的关系的图。
45.图32是表示比较例的双逆变器系统中的旋转电机的转速与可听噪声之间的关系的图。
46.图33是表示双逆变器系统中的旋转电机的转速与可听噪声之间的关系的图。
47.图34是表示旋转电机的控制区域的一例的图。
48.图35是表示图20以及图34的第一动作点(q1)处的、单逆变器系统、使用了通常的脉冲宽度调制控制的双逆变器系统、以及使用了混合脉冲宽度调制控制的双逆变器系统的相电流波形和相电流的fft解析结果的比较例的图。
49.图36是表示第一动作点处的、单逆变器系统、使用了通常的脉冲宽度调制控制的双逆变器系统、以及使用了混合脉冲宽度调制控制的双逆变器系统的直流总线电流波形和直流总线电流的fft解析结果的比较例的图。
50.图37是表示第一动作点处的、单逆变器系统、使用了通常的脉冲宽度调制控制的双逆变器系统、以及使用了混合脉冲宽度调制控制的双逆变器系统的电池电流波形和电池电流的fft解析结果的比较例的图。
51.图38是表示第一动作点处的、单逆变器系统、使用了通常的脉冲宽度调制控制的双逆变器系统、使用了混合脉冲宽度调制控制的双逆变器系统的电容器电流波形和电容器电流的fft解析结果的比较例的图。
52.图39是表示第一动作点处的、单逆变器系统、使用了通常的脉冲宽度调制控制的双逆变器系统、以及使用了混合脉冲宽度调制控制的双逆变器系统的直流总线电压纹波波形和直流总线电压纹波的fft解析结果的比较例的图。
53.图40是表示图20以及图34的第二动作点(q2)处的、单逆变器系统、使用了通常的脉冲宽度调制控制的双逆变器系统、以及使用了混合脉冲宽度调制控制的双逆变器系统的相电流和相电流的fft解析结果的比较例的图。
54.图41是表示第二动作点处的、单逆变器系统、使用了通常的脉冲宽度调制控制的双逆变器系统、以及使用了混合脉冲宽度调制控制的双逆变器系统的直流总线电流波形和直流总线电流的fft解析结果的比较例的图。
55.图42是表示第二动作点处的、单逆变器系统、使用了通常的脉冲宽度调制控制的双逆变器系统、以及使用了混合脉冲宽度调制控制的双逆变器系统的电池电流波形和电池电流的fft解析结果的比较例的图。
56.图43是表示第二动作点处的、单逆变器系统、使用了通常的脉冲宽度调制控制的双逆变器系统、以及使用了混合脉冲宽度调制控制的双逆变器系统的电容器电流波形和电容器电流的fft解析结果的比较例的图。
57.图44是表示第二动作点处的、单逆变器系统、使用了通常的脉冲宽度调制控制的双逆变器系统、使用了混合脉冲宽度调制控制的双逆变器系统的直流总线电压纹波波形和直流总线电压纹波的fft解析结果的比较例的图。
58.图45是表示在未考虑在直流链路电容器中流动的直流总线电流的纹波的情况下的、选择控制方式的顺序的一例的流程图。
59.图46是表示在考虑了在直流链路电容器中流动的直流总线电流的纹波的情况下的、选择控制方式的顺序的一例的流程图。
60.图47是表示在考虑了在直流链路电容器中流动的直流总线电流的纹波的情况下的、选择控制方式的顺序的其他例子的流程图。
61.图48是表示第二实施方式的旋转电机的控制区域的一例的图。
62.图49是表示第二实施方式的旋转电机的控制区域的其他例子的图。
63.图50是表示与第二实施方式进行比较的单逆变器系统的旋转电机的控制区域的一例的图。
具体实施方式
64.以下,基于附图说明通过两个逆变器驱动控制具有相互独立的多相开路绕组的旋转电机的旋转电机控制装置的实施方式。图1是包括旋转电机控制装置1(mg-ctrl)的旋转电机驱动系统的示意性的框图。旋转电机80例如是电动汽车或混合动力汽车等车辆中作为车轮的驱动力源的构件。旋转电机80是具有相互独立的多相(在本实施方式中为3相)的定子线圈8(开路绕组)的开路绕组型的旋转电机。在定子线圈8的两端分别连接有一个被独立地控制而在直流与多相(在此为3相)交流之间转换电力的逆变器10。即,在定子线圈8的一端侧连接有第一逆变器11(inv1),在定子线圈8的另一端侧连接有第二逆变器12(inv2)。以下,在无需区分第一逆变器11和第二逆变器12的情况下,将它们简称为逆变器10来进行说明。
65.逆变器10具有多个开关元件3。开关元件3使用igbt(insulated gate bipolar transistor:绝缘栅双极型晶体管)、功率mosfet(metal oxide semiconductor field effect transistor:金属-氧化层半导体场效晶体管)。在图1中,例示了使用igbt作为开关元件3的方式。在本实施方式中,第一逆变器11和第二逆变器12是使用相同种类开关元件3的相同的电路结构的逆变器10。但是,第一逆变器11和第二逆变器12也可以构成为使用不同种类的开关元件3。
66.例如,参照表1~表6后述的那样,在具有以不同的控制方式控制两个逆变器10那样的控制模式的情况下(后述的第一速度区域vr1中的控制的情况等),也优选根据每个控制方式的特性,使用不同种类的开关元件3来构成第一逆变器11和第二逆变器12。例如,在存在第一逆变器11实质上被短路而不进行开关控制那样的状况的情况下,优选地,与构成第一逆变器11的第一开关元件31相比,构成第二逆变器12的第二开关元件32是在断开状态和接通状态之间过渡时的开关损耗相对小的开关元件。例如,能够采用使用si-igbt作为第一逆变器11的第一开关元件31,使用sic-mosfet(silicon carbide-metal oxide semiconductor fet:碳化硅mosfet)作为第二逆变器12的第二开关元件32的方式。除了si-igbt以外,第一开关元件31也可以是si-mosfet。另外,除了sic-mosfet以外,第二开关元件32也可以是sic-sit(sic-static induction transistor:碳化硅静电感应晶体管)、gan-mosfet(gallium nitride-mosfet:氮化镓mosfet)等。
67.在两个逆变器10中,交流1相的臂3a分别由上级侧开关元件3h和下级侧开关元件3l的串联电路构成。在各开关元件3中,以从负极fg朝向正极p的方向(从下级侧朝向上级侧的方向)作为正方向并联地具有续流二极管35。另外,在本实施方式中,两个逆变器10与分别独立的直流电源6连接。即,第一逆变器11的负极fg即第一浮动接地fg1和第二逆变器12的负极fg即第二浮动接地fg2相互独立。另外,在逆变器10与直流电源6之间分别具有使直流总线电压平滑化的直流链路电容器4(平滑电容器)。
68.具体而言,交流1相的臂3a由第一上级侧开关元件31h和第一下级侧开关元件31l的串联电路构成的第一逆变器11,在直流侧连接有第一直流链路电容器41(第一平滑电容器),并且直流侧与第一直流电源61连接,交流侧与多相的定子线圈8的一端侧连接,在直流与多相交流之间转换电力。交流1相的臂3a由第二上级侧开关元件32h和第二下级侧开关元件32l的串联电路构成的第二逆变器12,在直流侧连接有第二直流链路电容器42(第二平滑电容器),并且直流侧与第二直流电源62连接,交流侧与多相的定子线圈8的另一端侧连接,
在直流与多相交流之间转换电力。
69.在本实施方式中,第一直流电源61以及第二直流电源62是电压等额定值相等的直流电源,第一直流链路电容器41以及第二直流链路电容器也是容量等额定值相等的电容器。直流电源6的额定电压为48伏至400伏左右。直流电源6例如由镍氢电池、锂离子电池等二次电池(电池)、双电层电容器等构成。旋转电机80能够作为电动机发挥作用,也能够作为发电机发挥作用。旋转电机80经由逆变器10将来自直流电源6的电力转换为动力(动力运行)。或者,旋转电机80将从车轮等传递的旋转驱动力转换为电力,并经由逆变器10对直流电源6进行充电(再生)。
70.如图1所示,逆变器10由旋转电机控制装置1控制。旋转电机控制装置1能够以相互独立的控制方式来控制第一逆变器11和第二逆变器12中的每一个(对于控制方式的详细内容将在后面进行描述)。旋转电机控制装置1以微型计算机等的逻辑电路为核心构件来构建。例如,旋转电机控制装置1基于从未图示的车辆控制装置等其他控制装置等提供的旋转电机80的目标扭矩(扭矩指令),进行使用了矢量控制法的电流反馈控制,并经由逆变器10对旋转电机80进行控制。
71.在旋转电机80的各相的定子线圈8中流动的实际电流由电流传感器15检测,旋转电机80的转子在各时刻的磁极位置由旋转变压器等旋转传感器13检测。旋转电机控制装置1使用电流传感器15以及旋转传感器13的检测结果,来执行电流反馈控制。旋转电机控制装置1构成为具有用于进行电流反馈控制的各种功能部,各功能部通过微型计算机等的硬件和软件(程序)的协作来实现。
72.图2的框图简单地示出了旋转电机控制装置1的一部分的功能部。在矢量控制法中,将在旋转电机80中流动的实际电流(u相电流iu,v相电流iv,w相电流iw)坐标转换为配置于旋转电机80的转子的永久磁铁所产生的磁场(磁通)的方向即d轴和与d轴正交的方向(相对于磁场的方向以电角度π/2行进的方向)的q轴的矢量分量(d轴电流id,q轴电流iq),来进行反馈控制。旋转电机控制装置1基于旋转传感器13的检测结果(θ:磁极位置,电角度),通过3相2相坐标转换部55进行坐标转换。
73.电流反馈控制部5(fb)在dq轴正交矢量坐标系中,根据基于旋转电机80的扭矩指令的电流指令(d轴电流指令id*,q轴电流指令iq*)与实际电流(d轴电流id,q轴电流iq)之间的偏差,对旋转电机80进行反馈控制,来运算电压指令(d轴电压指令vd*,q轴电压指令vq*)。旋转电机80通过第一逆变器11和第二逆变器12这两个逆变器10被驱动。因此,d轴电压指令vd*以及q轴电压指令vq*分别在分配部53(div)中被分配为第一逆变器11用的第一d轴电压指令vd1*以及第一q轴电压指令vq1*、第二逆变器12用的第二d轴电压指令vd2*以及第二q轴电压指令vq2*。
74.如上所述,旋转电机控制装置1能够以相互独立的控制方式来控制第一逆变器11和第二逆变器12中的每一个,并具有两个电压控制部7,其中,所述电压控制部7具有3相电压指令运算部73以及调制部74(mod)。即,旋转电机控制装置1具有:第一电压控制部71,生成第一逆变器11的u相、v相、w相各自的开关控制信号(su1,sv1,sw1);以及第二电压控制部72,生成第二逆变器12的u相、v相、w相各自的开关控制信号(su2,sv2,sw2)。详细内容将参照图9~图10等在后面进行描述,但第一逆变器11的电压指令(vu1**,vv1**,vw**)与第二逆变器12的电压指令(vu2**,vv2**,vw2**)的相位相差“π”。因此,向第二电压控制部72输
入从旋转传感器13的检测结果(θ)中减去“π”而得到的值。
75.另外,如后所述,调制方式具有与旋转电机80的旋转同步的同步调制和与旋转电机80的旋转独立的异步调制。一般而言,基于同步调制的开关控制信号的生成模块(在软件情况下为生成流程)与基于异步调制的开关控制信号的生成模块不同。上述的电压控制部7基于电压指令和与旋转电机80的旋转不同步的载波来生成开关控制信号,但在本实施方式中,为了简化说明,假设在电压控制部7中也生成基于同步调制的开关控制信号(例如在后述的矩形波控制的情况下的开关控制信号)来进行说明。
76.另外,如上所述,逆变器10的各个臂3a由上级侧开关元件3h和下级侧开关元件3l的串联电路构成。在图2中,虽然没有区分,但各相的开关控制信号作为上级用开关控制信号和下级用开关控制信号这两种信号而被输出。例如,对第一逆变器11的u相进行开关控制的第一u相开关控制信号su1作为在末尾附加了“ ”的第一u相上级侧开关控制信号su1 和在末尾附加了
“‑”
的第一u相下级侧开关控制信号su1-这两个信号而被输出。另外,若构成各个臂3a的上级侧开关元件3h和下级侧开关元件3l同时成为接通状态,则该臂3a成为短路状态。为了防止这种情况,设置有相对于各个臂3a的上级侧开关控制信号和下级侧开关控制信号都成为非有效状态的死区时间。该死区时间也在电压控制部7中被附加。
77.如图1所示,构成逆变器10的各开关元件3的控制端子(igbt、fet情况下的栅极端子)经由驱动电路2(drv)与旋转电机控制装置1连接,分别被单独地进行开关控制。用于驱动逆变器10等旋转电机80的高压系统电路(与直流电源6连接的系统)和以微型计算机等作为核心的旋转电机控制装置1等低压系统电路(3.3伏至5伏左右的动作电压的系统),动作电压(电路的电源电压)显著不同。驱动电路2分别提高驱动信号(开关控制信号)相对于各开关元件3的驱动能力(例如电压振幅、输出电流等,使后级的电路动作的能力)来进行中继。第一驱动电路21向第一逆变器11中继开关控制信号,第二驱动电路22向第二逆变器12中继开关控制信号。
78.旋转电机控制装置1能够执行例如在电角度的一个周期中输出模式不同的多个脉冲的脉冲宽度调制(pwm:pulse width modulation)控制和在电角度的一个周期中输出一个脉冲的矩形波控制(1脉冲控制(1-pulse))这两种控制方式,作为构成第一逆变器11以及第二逆变器12的开关元件3的开关模式的方式(电压波形控制的方式)。即,旋转电机控制装置1能够执行脉冲宽度调制控制和矩形波控制,作为第一逆变器11以及第二逆变器12的控制方式。另外,如上所述,旋转电机控制装置1能够以相互独立的控制方式来控制第一逆变器11和第二逆变器12中的每一个。
79.另外,脉冲宽度调制具有正弦波脉冲宽度调制(spwm:sinusoidal pwm)、空间矢量脉冲宽度调制(svpwm:space vector pwm)等连续脉冲宽度调制(cpwm:continuous pwm)、不连续脉冲宽度调制(dpwm:discontinuous pwm)等方式。因此,在旋转电机控制装置1能够执行的脉冲宽度调制控制中,作为控制方式包括连续脉冲宽度调制控制和不连续脉冲宽度调制控制。
80.连续脉冲宽度调制是对多相的全部的臂3a连续地执行脉冲宽度调制的调制方式,不连续脉冲宽度调制是对于多相的一部分的臂3a,包含将开关元件固定为接通状态或者断开状态的期间地进行脉冲宽度调制的调制方式。具体而言,在不连续脉冲宽度调制中,例如将与3相的交流电力内的1相对应的逆变器的开关控制信号的信号电平依次固定,使与其他
2相对应的开关控制信号的信号电平变动。在连续脉冲宽度调制中,全部的相被调制,而不上述那样地使与某一相对应的开关控制信号固定。这些调制方式根据旋转电机80所要求的转速、扭矩等的动作条件,以及为了满足该动作条件所需的调制率(3相交流的线电压的有效值相对于直流总线电压的比例)来确定。
81.在脉冲宽度调制中,基于作为电压指令的交流波形的振幅和三角波(包括锯齿波)状的载波(ca)的波形的振幅的大小关系来生成脉冲(参照图7等。)。也存在不通过与载波的比较而通过数字运算直接生成pwm波形的情况,但在该情况下,作为指令值的交流波形的振幅和假想的载波波形的振幅也具有相关关系。
82.在基于数字运算的脉冲宽度调制中,载波例如根据微型计算机的运算周期、电子电路的动作周期等旋转电机控制装置1的控制周期来确定。即,即使在多相的交流电力用于交流的旋转电机80的驱动的情况下,载波也具有不拘束于旋转电机80的转速、旋转角度(电角度)的周期(不同步的周期)。因此,载波和基于载波所生成的各脉冲均不与旋转电机80的旋转同步。因此,正弦波脉冲宽度调制、空间矢量脉冲宽度调制等调制方式存在被称为异步调制(asynchronous modulation)的情况。相对于此,与旋转电机80的旋转同步地生成脉冲的调制方式被称为同步调制(synchronous modulation)。例如,在矩形波控制(矩形波调制)中,由于在旋转电机80的电角度的一个周期中输出一个脉冲,因此,矩形波调制是同步调制。
83.但是,作为表示从直流总线电压向交流电压转换的转换率的指标,具有表示多相交流电压的线电压的有效值相对于直流总线电压的比例的调制率。一般而言,正弦波脉冲宽度调制的最大调制率为约0.61(≈0.612),空间矢量脉冲宽度调制控制的最大调制率为约0.71(≈0.707)。具有超过大约0.71的调制率的调制方式作为比通常的调制率高的调制方式,被称为“过调制脉冲宽度调制”。“过调制脉冲宽度调制”的最大调制率为约0.78。该0.78是从直流向交流的电力转换中的物理上(数学上)的极限值。在过调制脉冲宽度调制中,在调制率达到0.78时,变为在电角度的一个周期中输出一个脉冲的矩形波调制(1脉冲调制)。在矩形波调制中,调制率变为固定于物理上的极限值即约0.78。
84.调制率小于0.78的过调制脉冲宽度调制也能够使用同步调制方式、异步调制方式中的任一个的原理来实现。过调制脉冲宽度调制的代表性的调制方式是不连续脉冲宽度调制。不连续脉冲宽度调制也能够使用同步调制方式、异步调制方式中的任一个的原理来实现。例如,在使用同步调制方式的情况下,在矩形波调制中,在电角度的一个周期中输出一个脉冲,但在不连续脉冲宽度调制中,在电角度的一个周期中输出多个脉冲。若在电角度的一个周期存在多个脉冲,则脉冲的有效期间相应地减少,因此,调制率降低。因此,并不限于固定于大约0.78的调制率,也能够通过同步调制方式实现小于0.78的任意的调制率。例如,也可以使用在电角度的一个周期中输出9个脉冲的9脉冲调制(9-pulses)、输出5个脉冲的5脉冲调制(5-pulses)等多个脉冲调制(multi-pulses)。
85.另外,旋转电机控制装置1能够执行关机控制(sdn)、主动短路控制(asc),作为逆变器10、旋转电机80被检测到异常那样的情况的失效保护控制。关机控制是将构成逆变器10的全部的开关元件3的开关控制信号变为非激活状态而使逆变器10变为断开状态的控制。主动短路控制是将多相的全部的臂3a的上级侧开关元件3h或者多相的全部的臂3a的下级侧开关元件3l中的任一个变为接通状态,将另一个变为断开状态的控制。另外,将如下情
100),z4:(001-101),(010-110),z5:(011-010),(101-100),z6:(001-011),(100-110)这12个空间矢量也分别表示z1~z6的坐标。但是,它们是一个逆变器10不是空矢量,两个逆变器10都是动态矢量的组合。
93.z7:(100-001),(110-011),z8:(010-001),(110-101),z9:(010-100),(011-101),z10:(001-100),(011-110),z11:(001-010),(101-110),z12:(100-010),(101-011),对应于12个空间矢量。另外,z13:(100-011),z14:(110-001),z15:(010-101),z16:(011-100),z17:(001-110),z18:(101-010),对应于6个空间矢量。
94.图4例示了旋转电机80的dq轴矢量坐标系中的一个动作点的矢量图。在图中,“v1”是表示基于第一逆变器11的电压的第一电压矢量,“v2”是表示基于第二逆变器12的电压的第二电压矢量。通过两个逆变器10而在开路绕组即定子线圈8上呈现的电压相当于第一电压矢量v1与第二电压矢量v2的差“v1-v2”。图中的“va”表示在定子线圈8上呈现的合成电压矢量。另外,“ia”表示在旋转电机80的定子线圈8中流动的电流。如图4所示,如果控制第一逆变器11以及第二逆变器12,以使第一电压矢量v1和第二电压矢量v2的矢量的方向相差180度,则合成电压矢量va是通过将第二电压矢量v2的大小与第一电压矢量v1的方向相加而得到的矢量。
95.如本实施方式那样,在通过两个逆变器10驱动控制具有相互独立的多相开路绕组的旋转电机80的情况下,一般而言,两个逆变器10以相同的控制方式进行开关控制。但是,优选地,开关控制的方式根据旋转电机80所要求的扭矩、转速、直流侧的电压等各种要素(动作条件)来确定,以能够进行更高的系统效率的动作。因此,旋转电机控制装置1具有根据旋转电机80的动作区域(控制区域r)以不同的控制方式控制第一逆变器11和第二逆变器12的控制模式。通过发明人的实验、模拟能够确认,通过具有根据旋转电机80的动作条件以不同的控制方式控制第一逆变器11和第二逆变器12的控制模式,能够使系统效率变高。
96.(第一实施方式)
97.以下,对具有根据旋转电机80的动作条件以不同的控制方式控制第一逆变器11和第二逆变器12的控制模式的旋转电机控制装置1的实施方式进行详细说明。
98.在本实施方式(第一实施方式)中,设定有与旋转电机80的动作条件对应的多个控制区域r(参照图5等),旋转电机控制装置1以与各个控制区域r对应的控制方式来控制逆变器10。图5示出了旋转电机80的转速与扭矩之间的关系的一例。例如,如图5所示,作为旋转电机80的控制区域r,至少设定有第一速度区域vr1和在相同的扭矩t下旋转电机80的转速比第一速度区域vr1高的第二速度区域vr2。
99.如上所述,旋转电机控制装置1能够以开关模式不同的多个控制方式来控制第一逆变器11和第二逆变器12中的每一个,并且能够以相互独立的控制方式进行控制。控制方式包括:脉冲宽度调制控制(pwm),在电角度的一个周期中输出模式不同的多个脉冲;以及混合脉冲宽度调制控制(mx-pwm),在电角度的1/2周期即第一期间t1(参照图8等)中输出模式不同的多个脉冲,并在剩余的1/2周期即第二期间t2(参照图8等)中以持续非有效状态进行控制(稍后将参照图8~图11进行描述)。旋转电机控制装置1在第二速度区域vr2中,通过混合脉冲宽度调制控制来控制第一逆变器11以及第二逆变器12这两个逆变器。
100.在混合脉冲宽度调制控制中,由于在第二期间t2中开关控制信号也变为非有效状态,因此逆变器10的损耗减小,而且由于开关操作而引起的谐波电流也减小,从而旋转电机
80的损耗(铁损)也减小。即,通过执行混合脉冲宽度调制控制,能够减小系统损耗。
101.旋转电机控制装置1在第一速度区域vr1中,以与混合脉冲宽度调制控制不同的控制方式来控制第一逆变器11以及第二逆变器12中的每一个。例如,如下述的表1所示,旋转电机控制装置1在第一速度区域vr1中,通过主动短路控制(asc)来控制第一逆变器11以及第二逆变器12中的一个逆变器10(在此为第一逆变器11),通过脉冲宽度调制控制(pwm)来控制另一个逆变器10(在此为第二逆变器12)。将第一速度区域vr1中这样的控制称为对象第一速度区域控制。
102.[表1]
[0103]
rinv1inv2vr1ascpwmvr2mx-pwmmx-pwm
[0104]
另外,在表1中,例示了在第一速度区域vr1中通过主动短路控制来控制第一逆变器11的方式,但当然也可以是通过主动短路控制来控制第二逆变器12的方式。而且,在第一速度区域vr1中,也可以根据预先规定的条件交替地切换控制第一逆变器11的控制方式和控制第二逆变器12的控制方式。通过切换控制方式,能够抑制仅第一逆变器11以及第二逆变器12中的某一方消耗的情况、或仅第一直流电源61以及第二直流电源62中的某一方的放电量增加的情况。在此,规定的条件例如优选是恒定的时间或直流电源6的放电量。
[0105]
另外,如图6所示,作为控制区域r,也可以设定有第一速度区域vr1内的低速度侧的低速度侧第一速度区域vr1-1和在相同的扭矩t下旋转电机80的转速高于低速度侧第一速度区域vr1-1转速的、第一速度区域vr1内的高速度侧的高速度侧第一速度区域vr1-2。如下述的表2所示,旋转电机控制装置1在低速度侧第一速度区域vr1-1中,通过主动短路控制来控制第一逆变器11以及第二逆变器12中的一个逆变器10(在此为第一逆变器11),通过连续脉冲宽度调制控制来控制另一个逆变器10(在此为第二逆变器12)。另外,旋转电机控制装置1在高速度侧第一速度区域vr1-2中,通过主动短路控制来控制第一逆变器11以及第二逆变器12中的一个逆变器10(在此为第一逆变器11),通过不连续脉冲宽度调制控制来控制另一个逆变器10(在此为第二逆变器12)。
[0106]
[表2]
[0107]
rinv1inv2vr1-1(vr1)asccpwm(pwm)vr1-2(vr1)ascdpwm(pwm)vr2mx-pwmmx-pwm
[0108]
另外,在第一速度区域vr1未被分割为低速度侧第一速度区域vr1-1和高速度侧第一速度区域vr1-2的情况下,即,如表1所示,优选地,仅设定有第一速度区域vr1的情况下的脉冲宽度调制控制是连续脉冲宽度调制(cpwm)。
[0109]
另外,在表2中,虽然例示了在低速度侧第一速度区域vr1-1以及高速度侧第一速度区域vr1-2中,通过主动短路控制来控制第一逆变器11的方式,但当然也可以是通过主动短路控制来控制第二逆变器12的方式。另外,也可以在低速度侧第一速度区域vr1-1中通过主动短路控制来控制第一逆变器11,在高速度侧第一速度区域vr1-2中通过主动短路控制来控制第二逆变器12等,在低速度侧第一速度区域vr1-1和高速度侧第一速度区域vr1-2
中,使作为基于主动短路控制的控制对象的逆变器10不同(也包括相反的组合)。而且,如上所述,在低速度侧第一速度区域vr1-1以及高速度侧第一速度区域vr1-2(即第一速度区域vr1)中,根据预先规定的条件交替地切换控制第一逆变器11的控制方式和控制第二逆变器12的控制方式。
[0110]
另外,如图6所示,作为控制区域r,也可以设定有第二速度区域vr2内的低速度侧的低速度侧第二速度区域vr2-1和在相同的扭矩t下旋转电机80的转速高于低速度侧第二速度区域vr2-1转速的、第二速度区域vr2内的高速度侧的高速度侧第二速度区域vr2-2。另外,混合脉冲宽度调制控制(mx-pwm)也可以包括混合连续脉冲宽度调制控制(mx-cpwm)和混合不连续脉冲宽度调制控制(mx-dpwm)。详细情况将在后面描述,在混合连续脉冲宽度调制控制中,在第二期间t2中以持续非有效状态的方式进行控制,并且在第一期间t1中对多相的全部的臂3a连续地执行脉冲宽度调制(稍后将参照图8、图10进行描述。)。同样地,详细情况将在后面描述,在混合不连续脉冲宽度调制控制中,在第二期间t2中以持续非有效状态的方式进行控制,并且在第一期间t1中对多相的一部分的臂3a,包含将开关元件3固定为接通状态或者断开状态的期间地进行脉冲宽度调制(稍后将参照图9、图11进行描述。)。
[0111]
在这样的情况下,如下述的表3所示,旋转电机控制装置1在低速度侧第二速度区域vr2-1中,通过混合连续脉冲宽度调制控制(mx-cpwm)来控制第一逆变器11以及第二逆变器12这两个逆变器10,在高速度侧第二速度区域vr2-2中,通过混合不连续脉冲宽度调制控制(mx-dpwm)来控制第一逆变器11以及第二逆变器12这两个逆变器10。另外,在第二速度区域vr2未被分割为低速度侧第二速度区域vr2-1和高速度侧第二速度区域vr2-2的情况下,即,如表1和表2所示,在仅设定有第二速度区域vr2的情况下的混合脉冲宽度调制控制(mx-pwm)优选为混合连续脉冲宽度调制控制(mx-cpwm)。
[0112]
[表3]
[0113]
rinv1inv2vr1-1(vr1)asccpwm(pwm)vr1-2(vr1)ascdpwm(pwm)vr2-1(vr2)mx-cpwm(mx-pwm)mx-cpwm(mx-pwm)vr2-2(vr2)mx-dpwm(mx-pwm)mx-dpwm(mx-pwm)
[0114]
另外,如图7所示,作为控制区域r,还可以设定有在相同的扭矩t下旋转电机80的转速比第二速度区域vr2高的第三速度区域vr3。在该情况下,如下述的表4所示,优选地,旋转电机控制装置1在第三速度区域vr3中,通过所述矩形波控制来控制第一逆变器11以及第二逆变器12这两个逆变器10。另外,在表4中,例示了第一速度区域vr1以及第二速度区域vr2分别被分割为低速度侧以及高速度侧这两个区域的情况的控制方式的分配。关于第一速度区域vr1以及第二速度区域vr2未被分割的情况下的方式,只要在表1中追加第三速度区域vr3即可,因此省略表的记载。
[0115]
[表4]
[0116]
rinv1inv2vr1-1(vr1)asccpwm(pwm)vr1-2(vr1)ascdpwm(pwm)vr2-1(vr2)mx-cpwm(mx-pwm)mx-cpwm(mx-pwm)
vr2-2(vr2)mx-dpwm(mx-pwm)mx-dpwm(mx-pwm)vr31-pulse1-pulse
[0117]
在此,优选地,各控制区域r的边界根据与旋转电机80的扭矩对应的旋转电机80的转速和多相交流电压的线电压的有效值相对于直流总线电压(可以是指令值,也可以是来自输出电压的换算值)的比例中的至少一个而设定。
[0118]
如图5~图7所例示那样,旋转电机80的动作条件经常由转速和扭矩之间的关系来定义。控制区域r可以基于作为一个参数的转速来设定。在此,虽然也可以不考虑扭矩而将规定控制区域r的边界的转速设定为恒定,但更优选将规定控制区域r的边界的转速设定为根据扭矩而不同的值。由此,能够根据旋转电机80的动作条件以高的效率来驱动控制旋转电机80。
[0119]
另外,例如,在旋转电机80要求高的输出(快的转速、高的扭矩)的情况下,在电压型的逆变器中,通过使直流总线电压变高或使直流总线电压转换为交流电压的比例变高来实现该要求。在直流总线电压恒定的情况下,能够通过使直流总线电压转换为交流电压的比例变高来实现该要求。该比例能够表示为3相交流电力的有效值相对于直流总线电力的比例(在电压型逆变器的情况下,与3相交流电压的线电压的有效值相对于直流总线电压的比例等价)。如上所述,在控制逆变器10的控制方式中,存在该比例从低到高的各种方式。
[0120]
若控制区域r基于3相交流电压的线电压的有效值相对于根据对旋转电机80的要求而确定的直流总线电压的比例(调制率)来设定,则能够根据旋转电机80的动作条件,以高的效率来驱动控制旋转电机80。下述所示的表5与上述的表4对应,例示了与各个控制区域r对应的调制率。详细情况如后所述,但在表中,“mi_inv1”表示第一逆变器11的调制率,“mi_inv2”表示第二逆变器12的调制率,“mi_sys”表示系统整体的调制率。
[0121]
[表5]
[0122]
rmi_sysinv1mi_inv1inv2mi_inv2vr1-1m<aascm=0cpwmm<2avr1-2a≤m<xascm=0dpwm2a≤m<2xvr2-1x≤m<bmx-cpwmx≤m<bmx-cpwmx≤m<bvr2-2b≤m<0.78mx-dpwmb≤m<0.78mx-dpwmb≤m<0.78vr3m=0.781-pulsem=0.781-pulsem=0.78
[0123]
在本实施方式中,第一直流电源61的端子间电压“e1”和第二直流电源62的端子间电压“e2”相同(均为电压“e”)。若将第一逆变器11的交流侧的有效值设为“va_inv1”,将第二逆变器12的交流侧的有效值设为“va_inv2”,则第1逆变器11的调制率“mi_inv1”以及第2逆变器12的调制率“mi_inv2”如下述的式(1)、(2)所示。另外,系统整体的调制率“mi_sys”如下述的式(3)所示。
[0124]
mi_inv1=va_inv1/e1=va_inv1/e
···
(1)
[0125]
mi_inv2=va_inv2/e2=va_inv2/e
···
(2)
[0126]
mi_sys=(va_inv1 va_inv2)/(e1 e2)
[0127]
ꢀꢀꢀꢀꢀꢀ
=(va_inv1 va_inv2)/2e
···
(3)
[0128]
就电压的瞬时值而言,需要考虑瞬时的矢量,但若仅单纯地考虑调制率,则由式(1)~(3)得出,系统整体的调制率“mi_sys”为“(mi_inv1 mi_inv2)/2”。另外,在表5中,示
出了与各个控制区域r对应的调制率作为额定值。因此,在实际的控制时,考虑到控制区域r中的控制方式发生变化时的波动等,也可以包含与对应于各个控制区域r的调制率重叠的范围。
[0129]
另外,调制率“x”是根据基于连续脉冲宽度调制(空间矢量脉冲宽度调制)的调制率的理论上的上限值(大致为0.707),进而考虑死区时间来设定。如表1至表5等所示,在第一速度区域vr1中,有时仅由一个逆变器10进行调制。因此,在第一速度区域vr1中,一个逆变器10(在此为第二逆变器12)的最大调制率“2x”根据基于连续脉冲宽度调制控制的调制率的理论上的上限值(在空间矢量脉冲宽度调制中大致为0.707),进而考虑死区时间,例如被设定为0.5~0.6左右。因此,调制率“x”例如被设定为0.25~0.3左右的值。调制率“a”以及“b”基于实验、模拟等而适当地设定。
[0130]
在第一速度区域vr1中,通过主动短路控制来控制两个逆变器10中的一个逆变器10(例如第一逆变器11)。即,实质上仅由两个逆变器10中的一个逆变器10(例如第二逆变器12)来驱动旋转电机80。由于一个逆变器10不进行开关动作,因此能够降低相应的开关损耗,其结果,能够在抑制系统整体的损耗的同时驱动旋转电机80。
[0131]
如本结构那样,在具有两个逆变器10的情况下,能够生成比各个逆变器10的直流侧的电压大的振幅的交流电压。但是,旋转电机控制装置1不需要始终以交流的振幅变大的方式控制两个逆变器10,例如,在旋转电机80的转速为低速的情况下,存在只要生成能够由一个逆变器10能够生成的交流电压就足够的情况。若通过主动短路控制来控制两个逆变器10中的一个,则3相的定子线圈8在该一个逆变器10中被短路。在该情况下,另一个逆变器10驱动控制具有以具有中性点的方式连接的定子线圈8的旋转电机80。
[0132]
另外,如上所述,对于基于连续脉冲宽度调制的调制率,空间矢量脉冲宽度调制大于正弦波脉冲宽度调制,而不连续脉冲宽度调制大于空间矢量脉冲宽度调制。在第一速度区域vr1被分割情况下,高速度侧第一速度区域vr1-2是旋转电机80的转速高于低速度侧第一速度区域vr1-1的控制区域,在高速度侧第一速度区域vr1-2中,要求比低速度侧第一速度区域vr1-1高的调制率。通过在低速度侧第一速度区域vr1-1中进行连续脉冲宽度调制控制,在高速度侧第一速度区域vr1-2中进行不连续脉冲宽度调制控制,从而在整个第一速度区域vr1中,能够根据负载适当地切换控制方式,从而能够抑制系统整体的损耗来驱动旋转电机80。
[0133]
另外,在相同的扭矩t下,在最高速侧的第三速度区域vr3中,求出最高的调制率。在第三速度区域vr3中,通过在物理上成为最大的调制率的矩形波控制,来控制第一逆变器11以及第二逆变器12这两个逆变器10。即,在旋转电机80要求高负载的情况下,能够适当地驱动旋转电机80。
[0134]
第二速度区域vr2位于第一速度区域vr1与第三速度区域vr3的中间,能够称为与所谓的中间速度区域~高速度区域,或者中调制率区域~高调制率区域对应的控制区域。在该区域(第二速度区域vr2)中,考虑通过连续脉冲宽度调制控制或不连续脉冲宽度调制控制来控制第一逆变器11以及第二逆变器12这两个逆变器。在本实施方式中,在第二速度区域vr2中,由于通过混合脉冲宽度调制控制来控制第一逆变器11以及第二逆变器12这两个逆变器,因此,与通过连续脉冲宽度调制控制或不连续脉冲宽度调制控制进行控制的情况相比,能够进一步降低逆变器10的开关损耗。
[0135]
通过发明人的实验、模拟能够确认,混合脉冲宽度调制控制的应用尤其在低速度侧第二速度区域vr2-1中有效。即,至少在低速度侧第二速度区域vr2-1中,如果执行混合连续脉冲宽度调制控制,则能够降低系统损耗。如下述的表6所示,旋转电机控制装置1在高速度侧第二速度区域vr2-2中,也可以通过不连续脉冲宽度调制控制来控制第一逆变器11以及第二逆变器12这两个逆变器10,以代替混合不连续脉冲宽度调制控制。
[0136]
[表6]
[0137]
rmi_sysinv1mi_inv1inv2mi_inv2vr1-1m<aascm=0cpwmm<2avr1-2a≤m<xascm=0dpwm2a≤m<2xvr2-1x≤m<bmx-cpwmx≤m<bmx-cpwmx≤m<bvr2-2b≤m<0.78dpwmb≤m<0.78dpwmb≤m<0.78vr3m=0.781-pulsem=0.781-pulsem=0.78
[0138]
以下,参照u相电压指令(vu1**,vu2**)以及u相上级侧开关控制信号(su1 ,su2 )的波形例来说明各个控制区域r中的控制方式。对于第二u相下级侧开关控制信号su2-以及v相、w相,省略了图示。
[0139]
首先,参照图8~图11来说明在第二速度区域vr2中执行的、在本实施方式中最具特征的混合脉冲宽度调制控制(mx-pwm)。图8以及图10示出了混合连续脉冲宽度调制控制(mx-cpwm),图9以及图11示出了混合不连续脉冲宽度调制控制(mx-dpwm)。
[0140]
在图8和图9中,示出了第一逆变器11的载波ca即第一载波ca1、第二逆变器12的载波ca即第二载波ca2、第一逆变器11和第二逆变器12共用的u相电压指令即共用u相电压指令vu**、第一u相上级侧开关控制信号sul 、以及第二u相上级侧开关控制信号su2 的一例。对于第一u相下级侧开关控制信号su1-、第二u相下级侧开关控制信号su2-、以及v相、w相,省略了图示(其他控制方式也相同)。
[0141]
例如,第一载波ca1可以在“0.5<ca1<1”之间变化,第二载波ca2可以在“0<ca2<0.5”之间变化,电压指令(v**)可以在“0≤v**≤1”之间变化。通过将载波ca(第一载波ca1和第二载波va2)与电压指令(v**)进行比较,当电压指令为载波ca以上时,开关控制信号变为“1”,当电压指令小于载波ca时,开关控制信号变为“0”。关于载波ca与电压指令(v**)的比较逻辑,在以下的说明中也相同。
[0142]
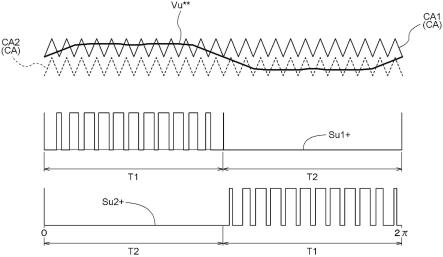
如图8和图9所示,第一载波ca1和第二载波ca2的振幅是电压指令(v**)所允许的振幅的一半。在通常的脉冲宽度调制中,载波ca的振幅与电压指令所允许的振幅相等,混合脉冲宽度调制中的载波ca可以称为半载波。通过使用这样的半载波,在电角度的1/2周期即第一期间t1中,由于这样的半载波与电压指令(v**)交叉,因此输出模式不同的多个脉冲作为开关控制信号。在剩余的1/2周期即第二期间t2中,由于半载波与电压指令(v**)不交叉,因此开关控制信号以持续非有效状态的方式被输出。
[0143]
另外,如图9所示,在混合不连续脉冲宽度调制控制中,在第二期间t2中,也将部分地成为有效状态的脉冲作为开关控制信号而输出。这是因为作为基础的不连续脉冲宽度调制的调制率比连续脉冲宽度调制大。在第二期间t2中变为有效状态的脉冲在电压指令(v**)的振幅中心附近,在电压指令(v**)的拐点附近被输出。如图9所示,即使在混合不连续脉冲宽度调制控制中,也可以说在第二期间t2中持续输出非有效状态。另外,如果将第二
期间t2仅设定为开关控制信号为非有效状态的期间(小于1/2周期的期间),并在一个周期中设定为第二期间t2以外的期间(1/2周期以上的期间),则也可以通过如下的方式定义混合脉冲宽度调制。也可以说,混合脉冲宽度调制控制进行控制以在作为电角度的1/2周期以上即第一期间t1中输出模式不同的多个脉冲,在电角度的一个周期中的剩余期间即第二期间t2中持续非有效状态。
[0144]
图10以及图11例示了与图8以及图9不同的混合连续脉冲宽度调制控制以及混合不连续脉冲宽度调制控制的方式。所生成的开关控制信号相同。在图10以及图11中示出了第一逆变器11的载波ca即第一载波ca1、第二逆变器12的载波ca即第二载波ca2、第一逆变器11的u相电压指令即第一u相电压指令vu1**、第二逆变器12的u相电压指令即第二u相电压指令vu2**、第一u相上级侧开关控制信号su1 、以及第二u相上级侧开关控制信号su2 的一例。例如,第一载波ca1以及第二载波ca2可以在“0.5<ca1<1”之间变化,电压指令(v**)可以在“0≤v**≤1”之间变化。第一载波ca1与第二载波ca2的相位相差180度(π)。另外,第一u相电压指令vu1**与第二u相电压指令vu2**的相位也相差180度(π)。
[0145]
如图10以及图11所示,第一载波ca1以及第二载波ca2的振幅是电压指令(v**)所允许的振幅的一半。因此,图10以及图11所示的方式中的载波ca也是半载波。通过使用这样的半载波,在电角度的1/2周期(或者1/2周期以上)即第一期间t1中,由于这样的半载波与电压指令(v**)交叉,因此输出模式不同的多个脉冲作为开关控制信号。在一个周期中的剩余的期间即第二期间t2中,由于半载波与电压指令(v**)不交叉,因此开关控制信号以持续非有效状态的方式被输出。
[0146]
图8及图9所例示的方式是利用两个半载波和作为一个共用的参考的电压指令(v**)进行调制的方式,可以称为双半载波单参考方式。另一方面,图10及图11所例示的方式是利用两个半载波和两个电压指令(v**)进行调制的方式,可以称为双半载波双参考方式。
[0147]
如参照图8~图11所述,混合脉冲宽度调制控制基于指令值(电压指令,在上述的例子中为u相电压指令(vu**(vu**=vu1**=vu2**),vu1**,vu2**))的变化域的1/2的波高的载波ca即半载波(第一载波ca1,第二载波ca2)和指令值来生成多个脉冲。并且,在本实施方式中,例示了双半载波单参考方式和双半载波双参考方式这两种方式作为混合脉冲宽度调制控制的方式。
[0148]
如参照图8以及图9所述,在双半载波单参考方式中,基于作为半载波而设定在比指令值(共用u相电压指令vu**)的振幅中心更靠高电压侧和低电压侧中的一方(在此为高电压侧)的第一半载波(第一载波ca1)和第一逆变器11以及第二逆变器12共用的指令值(共用u相电压指令vu**),来生成第一逆变器11用的脉冲。另外,在该方式中,基于具有与第一半载波(第一载波ca1)相同的相位且设定在比指令值(共用u相电压指令vu**)的振幅中心更靠高电压侧和低电压侧中的另一方(在此为低电压侧)的第二半载波(第二载波ca2)和指令值(共用u相电压指令vu**),来生成第二逆变器12用的脉冲。
[0149]
如参照图10以及图11所述,在双半载波双参考方式中,基于作为半载波而设定在比指令值(第一u相电压指令vu1**,第二u相电压指令vu2**)的振幅中心更靠高电压侧和低电压侧中的一方(在此为高电压侧)的第一半载波(第一载波ca1)和第一逆变器11用的第一指令值(第一u相电压指令vu1**),来生成第一逆变器11用的脉冲。另外,在该方式中,基于
具有与第一半载波(第一载波ca1)相差180度的相位且设定在与第一半载波(第一载波ca1)相同的一侧(高电压侧)的第二半载波(第二载波ca2)、以及相位与第一指令值(第一u相电压指令vu1**)相差180度的第二逆变器12用的第二指令值(第二u相电压指令vu2**),来生成第二逆变器12用的脉冲。
[0150]
另外,虽然省略了图示,但也能够通过基于共用的半载波和相位彼此相差180度的指令值来生成脉冲的单半载波/双参考方式来生成脉冲。即,在该方式中,共用的半载波(载波ca)被设定在比指令值(第一u相电压指令vu1**,第二u相电压指令vu2**)的振幅中心更靠高电压侧和低电压侧中的一方(例如为高电压侧),并基于该半载波(载波ca)和第一逆变器11用的第一指令值(第一u相电压指令vu1**)来生成第一逆变器11用的脉冲。另外,在该方式中,基于与第一指令值(第一u相电压指令vu1**)相比相位相差180度的第二逆变器12用的第二指令值(第二u相电压指令vu2**)和半载波(载波ca),生成第二逆变器12用的脉冲。
[0151]
但是,通过发明人的实验、模拟能够确认,与单半载波/双参考方式相比,双半载波单参考方式和双半载波双参考方式尤其能抑制载波ca的频率中的谐波分量。因此,优选地,混合脉冲宽度调制控制通过双半载波单参考方式或者双半载波双参考方式来执行。
[0152]
图12的波形图示出了低速度侧第一速度区域vr1-1中的第一逆变器11的u相电压指令即第一u相电压指令vu1**、第二逆变器12的u相电压指令即第二u相电压指令vu2**、载波ca、第一u相上级侧开关控制信号su1 、以及第二u相上级侧开关控制信号su2 的一例。例如,载波ca在“0<ca<1”之间变化,电压指令(v**)在“0≤v**≤1”之间变化。关于载波ca以及电压指令(v**)的变化域,在以下的说明中也相同。
[0153]
在低速度侧第一速度区域vr1-1中,通过连续脉冲宽度调制控制来控制第二逆变器12。如图12所示,基于载波ca和第二u相电压指令vu2**,生成脉冲状的第二u相上级侧开关控制信号su2 。
[0154]
如上所述,由于在低速度侧第一速度区域vr1-1中通过主动短路控制来控制第一逆变器11,因此,第一u相电压指令vu1**例如被固定为“0”,第一u相上级侧开关控制信号su1 始终为“0”。虽然省略了图示,但第一u相下级侧开关控制信号su1-始终为“1”。由此,第一逆变器11的u相的臂3a的上级侧开关元件3h(31h)被控制为断开状态,下级侧开关元件3l(31l)被控制为接通状态。关于v相、w相也是同样的,由此,第一逆变器11通过下级侧主动短路控制进行控制。另外,也可以不设定第一u相电压指令vu1**而将第一u相开关控制信号su1设定为固定值。
[0155]
图13的波形图示出了高速度侧第一速度区域vr1-2中的第一u相电压指令vu1**、第二u相电压指令vu2**、载波ca、第一u相上级侧开关控制信号su1 、以及第二u相上级侧开关控制信号su2 的一例。与低速度侧第一速度区域vr1-1同样地,由于在高速度侧第一速度区域vr1-2中通过主动短路控制来控制第一逆变器11,因此,第一u相电压指令vu1**为固定值。在高速度侧第一速度区域vr1-2中通过不连续脉冲宽度调制控制来控制第二逆变器12。在第二u相电压指令vu2**成为“0”或“1”的区间中,第一u相上级侧开关控制信号su1 为固定值,开关元件3(32)被固定为接通状态或者断开状态。
[0156]
图14的波形图示出了第三速度区域vr3中的第一u相电压指令vu1**、第二u相电压指令vu2**、载波ca、第一u相上级侧开关控制信号su1 、以及第二u相上级侧开关控制信号
su2 的一例。如上所述,在第三速度区域vr3中,第一逆变器11以及第二逆变器12都通过矩形波控制被控制。另外,在逆变器10通过矩形波调制控制被控制的情况下,虽然不需要载波ca,但为了易于与其他控制方式进行比较,也图示了载波ca。
[0157]
如参照表6所述,图15的波形图示出了在高速度侧第二速度区域vr2-2中,两个逆变器10通过不连续脉冲宽度调制控制被控制的情况下的第一u相电压指令vu1**、第二u相电压指令vu2**、载波ca、第一u相上级侧开关控制信号su1 、以及第二u相上级侧开关控制信号su2 的一例。
[0158]
如图8~图11、图14以及图15所示,在第一逆变器11以及第二逆变器12均被进行开关控制的情况下,第一u相电压指令vu1**与第二u相电压指令vu2**大致相差180度的相位。例如,u相电压的最大振幅为“(4/3)e”,线电压的最大振幅为“2e”(也参照图3以及图4的矢量图)。另外,第一直流电源61和第二直流电源62是相互独立的,并且第一直流电源61的第一直流总线电压e1与第二直流电源62的第二直流总线电压e2也可以是不同的值。例如,准确来说,u相电压的最大振幅为“((2/3)e1) (2/3)e2”,但为了易于理解,在本说明书中设为“e1=e2=e”。
[0159]
如上所述,在作为调制率和转速相对较低且电力相对较低的区域的第一速度区域vr1中,全部的电力从一个逆变器10供给。此时,向一个逆变器10提供电压指令(v**)以执行主动短路控制,向另一个逆变器10提供正常的电压指令(v**)。在调制率和转速比第一速度区域vr1高且电力比第一速度区域vr1高的电力区域即第二速度区域vr2和第三速度区域vr3中,从两个逆变器10供给相等的电力。此时,向两个逆变器10提供相位相差180度(π)的相同的电压指令(v**)。
[0160]
但是,在对逆变器10进行开关控制的情况下,存在与交流电流的基波重叠的脉动分量产生可听频带的噪声的情况。在以分别不同的控制方式控制两个逆变器10的情况下,产生与各个控制方式对应的脉动,从而可听频带的噪声可能增加。尤其在旋转电机80的转速为低速的情况下,脉动分量的频率(或其边带频率)包含于可听频带的可能性变高。旋转电机80的控制方式即逆变器10的控制方式优选根据动作条件而适当地设定,以能够实现高的系统效率下的动作和可听噪声的降低。
[0161]
本实施方式的旋转电机控制装置1具有作为旋转电机80的控制模式的损耗降低优先模式和噪声降低优先模式,并且能够对损耗降低优先模式和噪声降低优先模式进行切换。如上所述,旋转电机控制装置1在损耗降低优先模式下,在第一速度区域vr1中执行对象第一速度区域控制,在噪声降低优先模式下执行代替第一速度区域控制,以代替对象第一速度区域控制。具体而言,如下述的表7所示,旋转电机控制装置1在噪声降低优先模式下,在第一速度区域vr1中,执行通过脉冲宽度调制控制(连续脉冲宽度调制控制)来控制第一逆变器11以及第二逆变器12这两个逆变器10的代替第一速度区域控制,以代替对象第一速度区域控制。
[0162]
[表7]
[0163]
rmi_sysinv1mi_inv1inv2mi_inv2vr1m<xcpwmm<xcpwmm<xvr2-1x≤m<bmx-cpwmx≤m<bmx-cpwmx≤m<bvr2-2b≤m<0.78mx-dpwmb≤m<0.78mx-dpwmb≤m<0.78
vr3m=0.781-pulsem=0.781-pulsem=0.78
[0164]
在对逆变器10进行开关控制的情况下,存在与交流电流的基波重叠的脉动分量产生可听频带的噪声的情况。尤其在旋转电机80的转速为低速的情况下,脉动分量的频率(或其边带频率)包含于可听频带的可能性变高。例如,在以分别不同的控制方式控制两个逆变器10的情况下,产生与各个控制方式对应的脉动,从而可听频带的噪声可能增加。在损耗降低优先模式下,由于在旋转电机80的转速相对较低的第一速度区域vr1和第二速度区域vr2中仅驱动一个逆变器10,因此在两个逆变器10中不会产生不同频带的噪声。但是,由于被驱动的一个逆变器10的输出变大,因此噪声的能量变高。另外,在第一速度区域vr1和第二速度区域vr2中,随着车辆行驶的声音(车轮与路面的接触声音等行驶声音)也较小,因此在从被驱动的一个逆变器10输出的噪声为可听频带的噪声的情况下,存在使利用者容易听到噪声的可能性。
[0165]
例如,当车辆起步时或减速停止时,考虑到利用者容易听到可听频带的噪声而选择噪声降低优先模式,当车辆进行稳定行驶的稳定运转时,优选选择损耗降低优先模式。另外,这些模式也可以通过利用者的操作(也包括来自设定开关(触摸面板等的输入))来选择。
[0166]
在噪声降低优先模式下,在旋转电机80的转速相对较低的第一速度区域vr1和第二速度区域vr2中,以相同的控制方式控制第一逆变器11和第二逆变器12。另外,使电流流过定子线圈8的两个逆变器10的电流的相位相差大致180度。在以相同的控制方式控制两个逆变器10的情况下,包含脉动分量在内的电流的相位相差大致180度。因此,能够将脉动分量的至少一部分相互抵销,从而能够降低可听频带的噪声。
[0167]
图16的波形图示出了噪声降低优先模式下的第一速度区域vr1中的第一u相电压指令vu1**、第二u相电压指令vu2**、载波ca、第一u相上级侧开关控制信号su1 、以及第二u相上级侧开关控制信号su2 的一例。如表7所示,在噪声降低优先模式下,在第一速度区域vr1中,第一逆变器11以及第二逆变器12都通过连续脉冲宽度调制控制被控制。
[0168]
但是,在上述中,在损耗降低优先模式下,如参照表1~表6所述,例示了在第二速度区域vr2(在被分割的情况下为低速度侧第二速度区域vr2-1)中执行混合连续脉冲宽度调制控制(mx-cpwm)的方式。但是,如下述的表8所示,与第二速度区域vr2(低速度侧第二速度区域vr2-1)同样地,在第一速度区域vr1中,也可以对第一逆变器11以及第二逆变器12这两个逆变器都执行混合连续脉冲宽度调制控制(mx-cpwm)。即,作为对象第一速度区域控制,第一逆变器11以及第二逆变器12也都可以通过混合连续脉冲宽度调制控制(mx-cpwm)进行控制。
[0169]
[表8]
[0170]
rmi_sysinv1mi_inv1inv2mi_inv2vr1m<xmx-cpwmm<xmx-cpwmm<xvr2-1x≤m<bmx-cpwmx≤m<bmx-cpwmx≤m<bvr2-2b≤m<0.78mx-dpwmb≤m<0.78mx-dpwmb≤m<0.78vr3m=0.781-pulsem=0.781-pulsem=0.78
[0171]
即,在损耗降低优先模式下,在第一速度区域vr1中执行的对象第一速度区域控制中,具有参照表1~表6所述的方式(一个逆变器10通过主动短路控制(asc)被控制的方式
(asc/pwm))和参照表8所述的方式(两个逆变器10都通过混合连续脉冲宽度调制(mx-cpwm)被控制的方式(mx-cpwm/mx-cpwm))这两种方式。另外,如参照表7所述,在噪声降低优先模式下,在第一速度区域vr1中,执行代替第一速度区域控制,以代替对象第一速度区域控制。如上所述,代替第一速度区域控制是两个逆变器10都通过连续脉冲宽度调制(cpwm)被控制的方式(cpwm/cpwm)。即,在第一速度区域vr1中执行的控制方式中,具有“asc/pwm”,“mx-cpwm/mx-cpwm”和“cpwm/cpwm”这三种控制方式。
[0172]
如本实施方式那样,在具有两个逆变器10的情况下,能够生成比各个逆变器10的直流侧的电压更大的振幅的交流电压。但是,旋转电机控制装置1不需要始终以交流的振幅变大的方式控制两个逆变器10,例如在旋转电机80的转速为低速的情况下,存在只要生成能够由一个逆变器10能够生成的交流电压就足够的情况。因此,在参照表1~表6所述的上述的方式中,例示了作为对象第一速度区域控制,两个逆变器10中的一个逆变器10通过主动短路控制被控制的方式。在该方式中,定子线圈8彼此在一个逆变器10中被短路,旋转电机80与定子线圈具有电中性点的旋转电机相同。即,实质上仅由两个逆变器10中的一个逆变器10驱动旋转电机80。由于通过主动短路控制被控制的逆变器10不进行开关动作,因此能够在抑制系统整体的损耗的同时驱动旋转电机80。
[0173]
在表8所例示的方式中,执行混合脉冲宽度调制控制作为对象第一速度区域控制。如上所述,混合脉冲宽度调制控制是电角度的每一个周期的期间内的大致半个周期,使进行脉冲宽度调制的期间和无调制(固定状态)的期间组合的控制方式。因此,每1/2周期,实质上仅由两个逆变器10中的一个逆变器10驱动旋转电机80。由于逆变器10在驱动时间的大约1/2的期间中不进行开关动作,因此能降低开关损耗,从而降低系统损耗。通过发明人的实验、模拟能够确认,即使执行了“asc/pwm”和“mx-cpwm/mx-cpwm”中的任一个作为对象第一速度区域控制的情况下,与单逆变器系统相比,也大致同样地实现了损耗的改善。
[0174]
图17~图19示出了不同的控制方式下的在定子线圈8中流动的3相电流(u相电流iu,v相电流iv,w相电流iw)的波形和频率特性(3相电流的基于快速傅里叶变换(fft)的解析结果)。图17示出了“mx-cpwm/mx-cpwm”控制方式下的电流以及频率特性,图18示出了“cpwm/cpwm”控制方式下的电流以及频率特定,图19示出了作为比较例的单逆变器系统中的电流以及频率特性。另外,对于“asc/pwm”(“asc/cpwm”),由于频率特性具有与“mx-cpwm/mx-cpwm”的频率特性大致相同的倾向,因此省略了图示。另外,在此例示了载波ca的频率“f”为5[khz]的情况。
[0175]
通过比较图17和图19可知,在为了降低损耗而采用通过两个逆变器10驱动旋转电机80的双逆变器系统的情况下,当使用“mx-cpwm/mx-cpwm”作为控制方式时,对于单逆变器系统,5[khz]附近的谐波分量(载波ca的频率“f”的边带频率“f
±
3fm”的谐波分量)稍微增加(“fm”为旋转电机80的转速,以下相同)。另一方面,通过比较图18和图19可知,即使在采用双逆变器系统的情况下,当使用“cpwm/cpwm”作为控制方式时,对于单逆变器系统,5[khz]附近的谐波分量(载波ca的频率“f”的边带频率为“f
±
3fm”的谐波分量)减少,几乎不能被观测到。
[0176]
虽说人的可听频率大致为20[hz]~15[khz]左右,但超过10[khz]的频率通常很难听到,5[khz]附近的频率很容易被视为噪音。在损耗降低优先模式下执行的“mx-cpwm/mx-cpwm”或“asc/pwm”中,与单逆变器系统相比,5[khz]附近的谐波分量稍微增加。另一方面,
在噪声降低优先模式下执行的“cpwm/cpwm”中,与单逆变器系统相比,5[khz]附近的谐波分量大幅减少。
[0177]
因此,例如,当车辆起步时或减速停止时,考虑到利用者容易听到可听频带的噪声而优选选择噪声降低优先模式。另一方面,当车辆进行稳定行驶的稳定运转时,由于行驶声音等原因,利用者很难听到可听频带的噪声,而且由于稳定运转所占的时间比起步时等长得多,因此当稳定运转时,优选选择损耗降低优先模式。
[0178]
另外,虽然省略了图示,但可听频带的谐波分量(主要为载波ca的频率“f”的边带频率“f
±
3fm”的谐波分量)的大小大致为“cpwm/cpwm”<“asc/pwm”(“asc/cpwm”)≈“mx-cpwm/mx-cpwm”这样的关系。例如,在能够预测到第一速度区域vr1与第二速度区域vr2之间的过渡频繁发生这样的情况下,当在第一速度区域vr1中选择了“mx-cpwm/mx-cpwm”时,即使第一速度区域vr1与第二速度区域vr2之间的过渡频繁发生,也能够继续相同的控制方式,因此控制性提高。另一方面,在能够预测到第一速度区域vr1与第二速度区域vr2之间的过渡不会频繁发生的情况下,优选在第一速度区域vr1中选择“asc/pwm”(“asc/cpwm”)。
[0179]
在损耗降低优先模式下的第一速度区域vr1中的控制方式例如也可以根据车辆所行驶的道路是高速道路还是一般道路来选择(在一般道路的情况下,预测加减速较多而选择“mx-cpwm/mx-cpwm”等。)。或者,也可以根据跟前的车辆的平均行驶速度来选择控制方式(在平均速度较低的情况下,预测加减速较多且平均速度下降而选择“mx-cpwm/mx-cpwm”)。或者,也可以通过利用者的操作(设定开关(也包括来自触摸面板等的输入))来进行选择。
[0180]
图20示出了作为比较例的3相的定子线圈8通过中性点被连接的单逆变器系统中的旋转电机的控制区域的一例。如下述的表9所示,该逆变器例如在第一区域vr11中通过连续脉冲宽度调制控制(cpwm)进行控制,在第二区域vr12中通过不连续脉冲宽度调制控制(dpwm)进行控制,在第三区域vr13中通过矩形波控制(1-pulse)进行控制。
[0181]
[表9]
[0182]
rmi_sysinv1mi_invvr11m<y,where y>xcpwmm<y,where y>xvr12y≤m<0.78dpwmy≤m<0.78vr13m=0.781-pulsem=0.78
[0183]
其中,调制率“y”是比表5至表8所例示的调制率“x”大的值,其根据基于连续脉冲宽度调制(空间矢量脉冲宽度调制)的调制率的理论上的上限值(大致为0.707),进而考虑死区时间,例如被设定为0.5~0.6左右。
[0184]
另外,如上所述,在本实施方式中,在单逆变器系统中,在与执行不连续脉冲宽度调制(dpwm)的第二区域vr12相当的区域中设定第二速度区域vr2,并执行特征性的混合脉冲宽度调制控制(mx-pwm)。通过混合脉冲宽度调制控制,逆变器10的损耗降低,而且因开关动作而引起的谐波电流也减少,从而旋转电机80的损耗(铁损)也降低。即,通过执行混合脉冲宽度调制控制,能够降低系统损耗。另外,通过在与第一区域vr11相当的区域中设定第一速度区域vr1,能够在损耗降低优先模式下降低系统整体的损耗,在噪声降低优先模式下降低损耗并且降低噪声。
[0185]
图21至图33示出了单逆变器系统与双逆变器系统的比较例和双逆变器系统中的控制方式的比较例。图21至图26示出了在相对低的低速度区域(例如,第一区域vr11、第一
速度区域vr1)中的比较例。图28至图33示出了更高的高速度区域(例如,第二区域vr12、第二速度区域vr2)中的比较例。图27示出了在第二速度区域vr2中对两个逆变器10执行不连续脉冲宽度调制控制的比较例的双逆变器系统的旋转电机80的控制区域r的一例。在图28至图33中,在双逆变器系统的第二速度区域vr2中,还进行对两个逆变器10执行不连续脉冲宽度调制控制的情况(执行“dpwm/dpwm”方式的控制的情况)与对两个逆变器10执行混合连续脉冲宽度调制控制的情况(执行“mx-cpwm/mx-cpwm”方式的控制的情况)的比较。
[0186]
图21示出了开关控制信号(su,su1,su2)以及线电压(vuv)的比较例。左侧的列表示单逆变器系统的波形例,除此以外的列表示双逆变器系统的波形例。双逆变器系统的波形例从左起依次表示两个逆变器10都通过连续脉冲宽度调制控制(cpwm)被控制的情况(cpwm/cpwm)的波形例、第一逆变器11通过主动短路控制(asc)被控制、第二逆变器12通过连续脉冲宽度调制控制(cpwm)被控制的情况的(asc/cpwm)的波形例,以及两个逆变器10都通过混合连续脉冲宽度调制控制(mx-cpwm)被控制的情况(mx-cpwm/mx-cpwm)。对于单逆变器系统,示出了通过连续脉冲宽度调制控制(cpwm)被控制的情况的波形例。
[0187]
另外,从上数第一层示出了第一逆变器11的u相的臂3a的开关控制信号su1(在单逆变器系统的情况下为该逆变器的u相的臂的开关控制信号su)的波形例,从上数第二层示出了第二逆变器12的u相的臂3a的开关控制信号su2(在单逆变器系统的情况下为无)的波形例。从上数第三层示出了定子线圈8的u相与v相之间的线电压(uv线电压vuv)的波形例。
[0188]
图22示出了3相电流(u相电流iu,v相电流iv,w相电流iw)的比较例。图23示出了以载波ca的频率“f”(在此例如为5[khz])为中心的u相电流iu的基于快速傅里叶变换(fft)的解析结果,并对载波ca的频率“f”的边带频率“f
±
3fm”的大小进行比较(“fm”是旋转电机80的转速,以下也相同)。图24示出了以载波ca的频率的2倍的频率“2f”(在此例如为10[khz])为中心的u相电流iu的基于快速傅里叶变换(fft)的解析结果,并对“2f”的边带频率“2f
±
fm”的大小进行比较。图25示出了以载波ca的频率“f”为中心的uv线电压vuv的基于快速傅里叶变换(fft)的解析结果,并对载波ca的频率“f”的边带频率“f
±
3fm”的大小进行比较。图26示出了以载波ca的频率的2倍的频率“2f”为中心的uv线电压vuv的基于快速傅里叶变换(fft)的解析结果,并对“2f”的边带频率“2f
±
fm”的大小进行比较。
[0189]
如图24和图26所示,u相电流iu以及uv线电压vuv中的载波ca的频率的2倍的频率“2f”的边带频率“2f
±
fm”的谐波分量在双逆变器系统中的“asc/cpwm”方式以及“mx-cpwm/mx-cpwm”方式下比在单逆变器系统以及双逆变器系统中的“cpwm/cpwm”方式下小。因此,由于能抑制铁损,并且在“asc/cpwm”方式下,通过一个逆变器10不进行开关动作而降低开关损耗,因此,能适当地降低整体的系统损耗。另外,如参照图8至图11所述,即使在“mx-cpwm/mx-cpwm”方式下,由于大致每半个周期,仅某一方的逆变器10进行开关动作,因此能降低开关损耗,从而能适当地降低整体的系统损耗。因此,如上所述,在优先降低系统损耗的情况下(损耗降低优先模式的情况下),优选在第一速度区域vr1中选择“asc/cpwm”方式或者“mx-cpwm/mx-cpwm”方式。
[0190]
如图23和图25所示,u相电流iu以及uv线电压vuv中的载波ca的频率“f”的边带频率“f
±
3fm”的谐波分量在双逆变器系统中的“cpwm/cpwm”方式下最小。即使在双逆变器系统之间进行比较,与“asc/cpwm”方式以及“mx-cpwm/mx-cpwm”方式相比,在“cpwm/cpwm”方式下的载波ca的频率“f”的边带频率“f
±
3fm”的谐波分量更小。虽说人的可听频率大致为
20[hz]~15[khz]左右,但超过10[khz]的频率通常很难听到,5[khz]附近的频率很容易被视为噪音。即,载波ca的频率“f”的边带频率为“f
±
3fm”,5[khz]周边的谐波分量与“2f”的边带频率“2f
±
fm”即10[khz]周边的谐波分量相比,更容易成为可听噪声。因此,如本例所示,在载波ca的频率“f”为5[khz],并且优先抑制边带频率“f
±
3fm”的谐波分量变为可听噪声的情况下(噪声降低优先模式的情况下),优选在第一速度区域vr1中选择“cpwm/cpwm”方式。
[0191]
另外,如图24和图26所示,在单逆变器系统中的“cpwm”和双逆变器系统中的“cpwm/cpwm”方式中,u相电流iu和uv线电压vuv中的载波ca的频率的2倍的频率“2f”的边带频率“2f
±
fm”的谐波分量大致相等。因此,在转速相对低且可听噪声容易引人注目的区域中,优选地,选择噪声降低优先模式并以“cpwm/cpwm”方式进行控制。
[0192]
但是,如本实施方式那样,也可以不进行混合脉冲宽度调制而构建双逆变器系统。在该情况下,为了比单逆变器系统更加降低系统损耗,对于图27所示的控制区域r,考虑如下述的表10、表11所示那样来设定控制方式。将该双逆变器系统称为比较例的双逆变器系统。另外,关于控制区域r,与参照表1至表8等所述的区域相同。另外,如参照表1至表6等所述,表10示出了损耗降低优先模式的控制区域与控制方式之间的关系,如参照表7以及表8所述,表11示出了噪声降低优先模式的控制区域与控制方式之间的关系。
[0193]
[表10]
[0194]
rmi_sysinv1mi_inv1inv2mi_mv2vr1-1m<aascm=0cpwmm<2avr1-2a≤m<xascm=0dpwm2a≤m<2xvr2x≤m<0.78dpwmx≤m<0.78dpwmx≤m<0.78vr3m=0.781-pulsem=0.781-pulsem=0.78
[0195]
[表11]
[0196]
rmi_sysinv1mi_inv1inv2mi_inv2vr1-1m<acpwmm=acpwmm<avr1-2a≤m<xdpwma≤m<xdpwma≤m<xvr2x≤m<0.78dpwmx≤m<0.78dpwmx≤m<0.78vr3m=0.781-pulsem=0.781-pulsem=0.78
[0197]
如表10所示,在损耗降低优先模式下,在比较例的双逆变器系统中,旋转电机控制装置1在低速度侧第一速度区域vr1-1中,通过主动短路控制(asc)来控制第一逆变器11以及第二逆变器12中的一个逆变器10,通过连续脉冲宽度调制控制(cpwm)来控制另一个逆变器10。另外,旋转电机控制装置1在高速度侧第一速度区域vr1-2中,通过主动短路控制来控制第一逆变器11以及第二逆变器12中的一个逆变器10,通过不连续脉冲宽度调制控制(dpwm)来控制另一个逆变器10。另外,旋转电机控制装置1在第二速度区域vr2中,通过不连续脉冲宽度调制控制来控制第一逆变器11以及第二逆变器12这两个逆变器10。另外,旋转电机控制装置1在第三速度区域vr3中,通过矩形波控制(1-pulse)来控制第一逆变器11以及第二逆变器12这两个逆变器10。
[0198]
另外,如表11所示,在噪声降低优先模式下,在比较例的双逆变器系统中,旋转电机控制装置1在低速度侧第一速度区域vr1-1中,通过连续脉冲宽度调制控制(cpwm)来控制
第一逆变器11以及第二逆变器12这两个逆变器10。另外,旋转电机控制装置1在高速度侧第一速度区域vr1-2中,通过不连续脉冲宽度调制控制(dpwm)来控制第一逆变器11以及第二逆变器12这两个逆变器10。在第二速度区域vr2以及第三速度区域中,与损耗降低优先模式相同。
[0199]
如参照图7、表4至表6等所述,在执行混合脉冲宽度调制的本实施方式中,在图27、表10以及表11所例示的比较例的双逆变器系统中,在通过“dpwm/dpwm”方式被控制的第二速度区域vr2中的至少一部分(例如,图7以及图27所示的低速度侧第二速度区域vr2-1)以及高速度侧第一速度区域vr1-2中,两个逆变器10都通过混合连续脉冲宽度调制矩形波控制(“mx-cpwm/mx-cpwm”方式)被控制。
[0200]
以下,参照图28至图33,来比较说明对两个逆变器10执行不连续脉冲宽度调制控制的情况(执行“dpwm/dpwm”方式的控制的情况)、对两个逆变器10执行混合连续脉冲宽度调制控制的情况(执行“mx-cpwm/mx-cpwm”方式的控制的情况)、以及在单逆变器系统中逆变器通过不连续脉冲宽度调制(dpwm)被控制的情况。
[0201]
如参照表9以及图20所述,图28示出了在包含与低速度侧第二速度区域vr2-1对应的区域的第二区域vr12中,在单逆变器系统中执行不连续脉冲宽度调制控制的情况的波形例以及fft解析结果例。最上层示出了载波ca、u相电压指令“vu**”和u相的开关控制信号“su”,从上数第二层示出了uv线电压vuv,从上数第三层示出了3相电流(u相的电流iu,v相的电流iv,w相的电流iw)。最下层示出了u相的电流iu的基于快速傅里叶变换(fft)的解析结果。
[0202]
如参照表10、表11、图27所述,图29示出了在包含低速度侧第二速度区域vr2-1的第二速度区域vr2中,在双逆变器系统中对两个逆变器10执行不连续脉冲宽度调制控制的情况(执行“dpwm/dpwm”方式的控制的情况)的波形例以及fft解析结果例。最上层示出了载波ca、两个逆变器10各自的u相电压指令“vu1**、vu2**”、以及两个逆变器10的开关控制信号“sul 、su2 ”。第二层以下与图28相同。
[0203]
如参照表3至表6、图7等所述,图30示出了在包含在第二速度区域vr2中的低速度侧第二速度区域vr2-1中,在双逆变器系统中对两个逆变器10执行混合连续脉冲宽度调制控制的情况(执行“mx-cpwm/mx-cpwm”方式的控制的情况)的波形例以及fft解析结果例。波形例所示的信号与图29相同。
[0204]
图31示出了参照表9所述的单逆变器系统中的转速与可听噪声之间的关系,图32示出了参照表11等所述的比较例的双逆变器系统中的旋转电机80的转速与可听噪声之间的关系,图33示出了参照表7等所述的本实施方式的双逆变器系统中的旋转电机80的转速与可听噪声之间的关系。另外,在图31的单逆变器系统中,根据调制率以及旋转电机80的转速,如参照图20以及表9所述,控制区域从第一区域vr11变为第二区域vr12,控制方式从连续脉冲宽度调制控制(cpwm)切换为不连续脉冲宽度调制控制(dpwm)。另外,在图32的比较例的双逆变器系统中,根据调制率以及旋转电机80的转速,如参照图5~图7以及表11所述,控制区域从低速度侧第一速度区域vr1-1变为高速度侧第一速度区域vr1-2,控制方式从“cpwm/cpwm”方式切换为“dpwm/dpwm”方式。另外,在图33的本实施方式的双逆变器系统中,根据调制率以及旋转电机80的转速,如参照图5~图7以及表7所述,控制区域从低速度侧第一速度区域vr1-1变为高速度侧第一速度区域vr1-2,控制方式从“cpwm/cpwm”方式切换为“mx-cpwm/mx-cpwm”方式。
[0205]
从图28与图29的比较和图28与图30的比较可知,与在双逆变器系统中执行“dpwm/dpwm”方式或者“mx-cpwm/mx-cpwm”方式的控制的情况相比,在单逆变器系统中执行“dpwm”的控制的情况下,在3相电流中重叠有更多的纹波。因此,如fft解析结果所示,与双逆变器系统相比,在单逆变器系统中产生更多的载波ca的频率“f”的边带频率“f
±
3fm”的谐波分量。该边带频率“f
±
3fm”的谐波分量有时与低次的谐波分量(11th,13th)重叠。
[0206]
如图31所示,在单逆变器系统中,根据旋转电机80的速度而产生的旋转电机80的噪声(将转速的频率设为“fm”的“12fm”的可听噪声)与边带频率“f
±
3fm”的可听噪声在由虚线的圆包围的部分重叠,因而可听噪声变得非常大。另一方面,如图32以及图33所示,在双逆变器系统中,由于几乎不会产生载波ca的频率“f”的边带频率“f
±
3fm”的可听噪声,因此根据旋转电机80的速度而产生的旋转电机80的可听噪声(12fm)与该边带频率“f
±
3fm”的可听噪声不会重叠。因此,与单逆变器系统相比,双逆变器系统能够构建静音性高的系统。
[0207]
另外,从比较图29和图30可知,与“dpwm/dpwm”方式相比,在“mx-cpwm/mx-cpwm”方式下的逆变器10的开关次数变少。因此,图30所示的“mx-cpwm/mx-cpwm”方式与图29所示的“dpwm/dpwm”方式相比,开关损耗小,从而能降低系统损耗。如上所述,关于可听噪声,“dpwm/dpwm”方式和“mx-cpwm/mx-cpwm”方式相同。因此,通过在双逆变器系统的第二速度区域vr2(低速度侧第二速度区域vr2-1)中采用“mx-cpwm/mx-cpwm”方式,能够实现高静音性和系统损耗的降低。
[0208]
但是,如参照表8所述,在第一逆变器11和第二逆变器12都通过混合脉冲宽度调制控制来驱动的情况下,在高扭矩的动作区域中,在直流电源6或直流链路电容器4中流动的直流总线电流的纹波(尤其是旋转电机80的转速的频率的3次谐波分量)有时会变大。这样的谐波电流纹波会缩短直流电源6或直流链路电容器4的寿命,也有可能导致旋转电机控制装置1的故障。通过增大直流链路电容器4的容量,虽然能够减少纹波,但也有可能导致直流链路电容器4的体积的大型化或成本上升。以下,说明对这样的纹波的应对。
[0209]
图34示出了旋转电机80的控制区域的一例,在第一速度区域vr1以及第二速度区域vr2中,将扭矩在规定扭矩tref以上的区域称为高扭矩区域vrh,将小于规定扭矩的区域称为低扭矩区域vrl。第一动作点q1是属于高扭矩区域vrh的动作点,第二动作点q2是属于低扭矩区域vrl的动作点。以下,例示这两处的动作点的模拟波形以及fft解析结果,将单逆变器系统、使用了通常的脉冲宽度调制控制的双逆变器系统、使用了混合脉冲宽度调制控制的双逆变器系统进行比较说明。另外,作为参考,在图20中示出了单逆变器系统中的第一动作点q1和第二动作点q2。另外,在波形例中,虽然未示出具体的数值,但为了与旋转电机80的输出相等,在单逆变器系统中,直流侧的电压的额定值(直流链路电压vdc的额定值)是双逆变器系统的直流链路电压vdc的额定值的2倍。
[0210]
图35~图39示出了图20及图34的第一动作点q1处的单逆变器系统、使用了通常的脉冲宽度调制控制的双逆变器系统、使用了混合脉冲宽度调制控制的双逆变器系统的波形例的比较例、以及fft解析结果的比较例。另外,图40~图44示出了图20及图34的第二动作点q2处的单逆变器系统、使用了通常的脉冲宽度调制控制的双逆变器系统、使用了混合脉冲宽度调制控制的双逆变器系统的波形例的比较例、以及fft解析结果的比较例。在图35~
图44的全部图中,从左向右依次示出了单逆变器系统、使用了通常的脉冲宽度调制控制的双逆变器系统、以及使用了混合脉冲宽度调制控制的双逆变器系统。另外,在图35~图44的全部图中,上层侧示出了波形例,下层侧示出了fft解析结果。
[0211]
另外,以在单逆变器系统中通过不连续脉冲宽度调制控制(dpwm)来驱动逆变器10、在使用了通常的脉冲宽度调制控制的双逆变器系统中通过不连续脉冲宽度调制控制(dpwm/dpwm)来驱动两个逆变器10、在使用了混合脉冲宽度调制控制的双逆变器系统中通过混合连续脉冲宽度调制控制(mx-cpwm/mx-cpwm)来驱动两个逆变器10的方式来进行模拟。另外,在图35~图44中,“fm”表示旋转电机80的转速的频率(旋转频率),“f”表示逆变器10的开关频率(载波ca的频率)。如上所述,在此,将开关频率“f”设为5[khz]来进行模拟。
[0212]
图35以及图40示出了3相交流的相电流(iu,iv,iw)的波形以及相电流(例如以u相电流iu为代表)的fft解析结果。图36以及图41示出了直流总线电流idc的波形、以及直流总线电流idc的fft解析结果。另外,关于双逆变器系统,作为代表,示出了第一逆变器11的直流侧的电流波形。图37以及图42示出了在直流电源6中流动的电池电流ib的波形以及电池电流ib的fft解析结果。关于双逆变器系统,作为代表,示出了在第一逆变器11一侧的第一直流电源61中流动的电流的波形。图38以及图43示出了在直流链路电容器4中流动的电容器电流ic的波形以及电容器电流ic的fft解析结果。关于双逆变器系统,作为代表,示出了在第一逆变器11侧的第一直流链路电容器41中流动的电流的波形。
[0213]
图39以及图44示出了直流链路电压vdc的波形,尤其是在直流链路电压vdc上呈现的直流总线电压纹波波形以及直流总线电压纹波的fft解析结果。由于直流总线电压纹波的波高与直流链路电压vdc(在双逆变器系统中为100~200[v],在单逆变器系统中为200~400[v])相比小至10[v]左右,因此在图39以及图44中示出了直流的额定值附近的交流分量的波形。另外,关于双逆变器系统,作为代表,示出了第一逆变器11的直流链路电压vdc的波形。
[0214]
如图35以及图40所示,在单逆变器系统中,在开关频率“f”的附近,产生高的噪声分量。但是,在双逆变器系统中,第一逆变器11与第二逆变器12相互抵销由开关频率“f”引起的噪声,从而开关频率“f”附近的噪声分量被大幅地抑制。
[0215]
如图36以及图41所示,由于直流总线电流idc即使在双逆变器系统中也是流过各个逆变器10的电流,因此无法抵销由开关频率“f”引起的电流纹波,从而会观测到与单逆变器系统相同的噪声分量。尤其地,由于单逆变器系统和使用了通常的脉冲宽度调制控制的双逆变器系统的控制方式都是不连续脉冲宽度调制控制(dpwm),因此fft解析结果几乎相同。另一方面,如参照图8等所述,在使用了混合连续脉冲宽度调制控制(mx-cpwm)的双逆变器系统中,由于在电角度的一个周期中脉冲变得不对称,因此观测到旋转频率“fm”的3次谐波分量“3fm”的纹波为较高的值。
[0216]
在图37以及图42所示的电池电流ib中也观测到与直流总线电流idc相同的倾向。其结果,如图37所示,在第一动作点q1处的电池电流ib中的纹波分量的波高在单逆变器系统中约为30[a],在使用了通常的不连续脉冲宽度调制控制的双逆变器系统中约为50[a],而在使用了混合不连续脉冲宽度调制控制的双逆变器系统中约为130[a],变得非常大。另一方面,如图42所示,在第二动作点q2处的电池电流ib中的纹波分量的波高在单逆变器系统以及使用了通常的不连续脉冲宽度调制控制的双逆变器系统中小于20[v],即使在使用
了混合不连续脉冲宽度调制控制的双逆变器系统中也小于50[a]。即,即使在使用了混合不连续脉冲宽度调制控制的双逆变器系统中,扭矩相对较小的第二动作点q2处的电池电流ib中的纹波分量的波高也被抑制为小于扭矩相对较大的第一动作点q1处的使用了通常的不连续脉冲宽度调制控制的双逆变器系统中的波高(约50[a])。
[0217]
电容器电流ic是“电池电流ib-直流总线电流idc”。因此,如图38以及图43所示,观测到与电池电流ib以及直流总线电流idc相同的倾向。即,在使用了混合不连续脉冲宽度调制控制的双逆变器系统中,虽然观测到旋转频率“fm”的3次谐波分量“3fm”的纹波分量,但与第一动作点q1相比,在第二动作点q2中,电容器电流ic的纹波分量的波高被抑制,成为与使用了通常的不连续脉冲宽度调制控制的双逆变器系统同等程度。
[0218]
如图39以及图44所示,在直流链路电压vdc中也观测到相同的倾向。即,在使用了混合不连续脉冲宽度调制控制的双逆变器系统中,观测到旋转频率“fm”的3次谐波分量“3fm”的纹波分量,在第一动作点q1中,对于其他系统中的10[v]左右的波高的纹波电压,观测到具有约15[v]的波高的纹波电压。但是,与第一动作点q1相比,在第二动作点q2中,能抑制该纹波电压的波高,对于使用了通常的不连续脉冲宽度调制控制的双逆变器系统中的3[v]左右的波高的纹波电压成为约5[v]的波高的纹波电压,并且被抑制为与使用了通常的不连续脉冲宽度调制控制的双逆变器系统大致相同程度。
[0219]
若电池电流ib的纹波变大,则直流电源6的损耗变大。由于该损耗成为热量,因此直流电源6的发热量变大,可能会缩短直流电源6的寿命。为了减少上述那样的旋转频率“fm”的3次谐波分量的纹波,考虑增大直流链路电容器4的容量。但是,这会导致直流链路电容器4的体积的大型化,并且可能由于部件单价的上升或容纳空间的扩大等而使成本上升。
[0220]
如参照图35~图44所述,在相对低扭矩的第二动作点q2中,与相对高扭矩的第一动作点q1相比,能抑制旋转频率“fm”的3次谐波分量的纹波。因此,优选地,在包含第二动作点q2的控制区域(低扭矩区域vrl)中,通过混合脉冲宽度调制控制来驱动两个逆变器10,在包含第一动作点q1的控制区域(高扭矩区域(vrh))中,通过通常的脉冲宽度调制来驱动两个逆变器10。即,优选地,旋转电机控制装置1在第一速度区域vr1以及第二速度区域vr2中,在预先规定的扭矩即规定扭矩tref以上的高扭矩区域vrh中,通过脉冲宽度调制控制来控制第一逆变器11以及第二逆变器这两个逆变器10,在小于规定扭矩tref的低扭矩区域vrl中,通过混合脉冲宽度调制控制来控制第一逆变器11以及第二逆变器12这两个逆变器10。例如,旋转电机控制装置1优选如下述的表12那样驱动逆变器10。
[0221]
[表12]
[0222][0223]
在此,当与参照表8所述的控制区域对应时,如下述的表13所示。在图34中,例示了与该方式对应的控制区域r和控制方式。另外,如表8或表12所示,mi_sis、mi_inv1、mi_inv2
相同,因此在表13中省略了mi_inv1、mi_inv2。
[0224]
[表13]
[0225][0226]
即,如表13所例示那样,旋转电机控制装置1在第一速度区域vr1以及低速度侧第二速度区域vr2-1中的小于规定扭矩tref的低扭矩区域vrl中,通过混合连续脉冲宽度调制控制(mx-cpwm)控制第一逆变器11以及第二逆变器12这两个逆变器10,在高速度侧第二速度区域vr2-2中的小于规定扭矩tref的低扭矩区域vrl中,通过混合不连续脉冲宽度调制控制(mx-dpwm)控制第一逆变器11以及第二逆变器12这两个逆变器10。另外,旋转电机控制装置1在第一速度区域vr1中的高扭矩区域vrh中,通过连续脉冲宽度调制控制(cpwm)控制第一逆变器11以及第二逆变器12这两个逆变器10,在第二速度区域vr2中的高扭矩区域vrh中,通过不连续脉冲宽度调制控制(dpwm)控制第一逆变器11以及第二逆变器12这两个逆变器10。
[0227]
另外,实际的直流电源6具有电阻分量(电池电阻rb)以及电感(inductance)分量(电池电感lb)。在发明人的模拟中,使用现有的直流电源6中的电池电阻rb以及电池电感lb,根据直流总线电流idc运算电池电流ib以及直流链路电压vdc。还能够确认出运算出的电池电流ib以及直流链路电压vdc的值与基于开关频率“f”的电流增益的频率特性一致。另外,由于当电池电阻rb以及电池电感lb变大时,频率特性在电流增益变小的方向上变化,因此能进一步降低电流纹波。
[0228]
以下,也参照图45以及图46的流程图进行说明。图45的流程图是表示当不考虑在直流链路电容器4中流动的直流总线电流的纹波时的控制方式的选择例的流程图。具体而言,图45示出了当选择上述的表8以及表11所示的控制方式时的判定顺序的一例。如参照图34~图44所述,图46是表示当考虑在直流链路电容器4中流动的直流总线电流时的控制方式的选择例的流程图。具体而言,图46示出了当选择上述的表13所示的控制方式时的判定顺序的一例。在图45以及图46中,“m”、“x
1”、“x
2”表示调制率,“s”、“s1~s
7”表示旋转电机80的转速,“t”表示旋转电机80的扭矩,“tref”表示规定扭矩。
[0229]
如图45所示,首先选择运转模式(drive mode)(#1)。在此,当选择了噪声降低优先模式(噪声优先模式:noise priority mode)时,根据表11的条件选择控制方式(#3:pwm pattern selection),从而确定步骤#4所示的各控制方式。另外,步骤#3中的“x
1”相当于表11中的“a”。如图45以及表11所示,当调制率“m”小于“x1(a)”并且转速“s”小于“s
1”时,选择连续脉冲宽度调制控制(cpwm)作为两个逆变器10的控制方式(#31
→
#41)。当调制率“m”为“x1(a)”以上且小于“0.78”,并且转速“s”为“s
1”以上且小于“s
2”时,选择不连续脉冲宽度调
制控制(dpwm)作为两个逆变器10的控制方式(#32
→
#42)。当调制率“m”为“0.78”,并且转速“s”为“s
2”以上且小于“s
3”时,选择矩形波控制(1-pulse)作为两个逆变器10的控制方式(#33
→
#43)。
[0230]
在步骤#1中,当选择了损耗降低优先模式(效率优先模式:efficiency priority mode)时,根据表8的条件来选择控制方式(#5:pwm pattem selection),从而确定步骤#6所示的各控制方式。另外,步骤#5中的“x
2”相当于表8中的“b”。如图45以及表8所示,当调制率“m”小于“x2(b)”并且转速“s”小于“s
4”时,选择混合连续脉冲宽度调制控制(mx-cpwm)作为两个逆变器10的控制方式(#51
→
#61)。当调制率“m”为“x2(b)”以上且小于“0.78”,并且转速“s”为“s
4”以上且小于“s
5”时,选择混合不连续脉冲宽度调制控制(mx-dpwm)作为两个逆变器10的控制方式(#52
→
#62)。当调制率“m”为“0.78”并且转速“s”为“s
5”以上且小于“s
6”的情况下,选择矩形波控制(1-pulse)作为两个逆变器10的控制方式(#53
→
#63)。
[0231]
即使在考虑直流链路电容器4中流动的直流总线电流的情况下,同样地,如图46所示,首先选择运转模式(#1)。在此,当选择了损耗降低优先模式(efficiency priority mode)时,接下来判定旋转电机80的扭矩是否超过规定扭矩tref(#2:torque check)。当旋转电机80的扭矩小于规定扭矩tref时,根据表13的上层侧的条件来选择(#5)并确定(#6)控制方式。由于步骤#5以及步骤#6与图45相同,因此省略了详细的说明。另外,在步骤#3中的“x
2”相当于表13中的“b”。
[0232]
当在步骤#1中选择了噪声降低优先模式(噪声优先模式:noise priority mode)时,或者当在步骤#1中选择了损耗降低优先模式(efficiency priority mode),并且在步骤#2的“扭矩判定”中判定为旋转电机80的扭矩为规定扭矩tref以上时,根据表13的下层侧的条件来选择(#3)并确定(#4)控制方式。由于步骤#3以及步骤#4与图45相同,因此省略了详细的说明。另外,步骤#3中的“x
1”相当于表13中的“x”。
[0233]
在参照图46所述的方式中,例示了在步骤#2中执行“扭矩判定”的方式。但是,如图47所示,在步骤#2中,也可以判定扭矩与转速这双方是否都满足基准。具体而言,首先选择运转模式(#1),在此,当选择了损耗降低优先模式(efficiency priority mode)时,接下来判定旋转电机80的扭矩“t”是否超过规定扭矩tref并且是否超过了规定转速sref(#2)。当旋转电机80的扭矩“t”为规定扭矩tref以下时,或者当旋转电机80的转速“s”为规定转速sref以下时,或者当旋转电机80的扭矩“t”为规定扭矩tref以下并且旋转电机80的转速“s”为规定转速sref以下时,与表13的上层侧的条件同样地,选择(#5)并确定(#6)控制方式。由于步骤#5以及步骤#6与图45以及图46相同,因此省略了详细的说明。
[0234]
当在步骤#1中选择了噪声降低优先模式(噪声优先模式:noise priority mode)时,或者当在步骤#1中选择了损耗降低优先模式(efficiency priority mode),接下来在步骤#2中判定为旋转电机80的扭矩“t”超过规定扭矩tref,并且旋转电机80的转速“s”超过规定转速sref时,与表13的下层侧的条件同样地,选择(#3)并确定(#4)控制方式。由于步骤#3以及步骤#4与图45以及图46相同,因此省略了详细的说明。
[0235]
即,在图46中例示了在相对高扭矩区域中,以优先效率的损耗降低优先模式(efficiency priority mode)驱动旋转电机80,在相对低扭矩区域中,以噪声降低优先模式(噪声优先模式:noise priority mode)驱动旋转电机80的方式。在图47中,例示了在相对高扭矩且高转速区域中,以优先效率的损耗降低优先模式(efficiency priority mode)
驱动旋转电机80,在相对低扭矩且低转速区域中,以噪声降低优先模式(噪声优先模式:noise priority mode)驱动旋转电机80的方式。
[0236]
(第二实施方式)
[0237]
以下,对具有根据旋转电机80的动作条件以不同的控制方式控制第一逆变器11和第二逆变器12的控制模式的旋转电机控制装置1的第二实施方式进行详细说明。关于与上述的第一实施方式相同的事项,参照在第一实施方式的说明中参考的附图进行说明。另外,在参照与第一实施方式不同的附图的第二实施方式的说明中,也使用相同的参照标记对与第一实施方式相同的事项进行说明。
[0238]
在本实施方式(第二实施方式)中,设定有与旋转电机80的动作条件对应的多个控制区域r(参照图48等),旋转电机控制装置1以与各个控制区域r对应的控制方式控制逆变器10。图48示出了旋转电机80的转速与扭矩之间的关系的一例。例如,如图48所示,作为旋转电机80的控制区域r,设定有第一速度区域vr1、在相同的扭矩t下旋转电机80的转速高于第一速度区域vr1的第二速度区域vr2、以及在相同的扭矩t下旋转电机80的转速高于第二速度区域vr2的第三速度区域vr3。
[0239]
例如,如下述的表14所示,旋转电机控制装置1在第一速度区域vr1中,通过主动短路控制(asc)来控制第一逆变器11以及第二逆变器12中的一个逆变器10,通过连续脉冲宽度调制控制(cpwm)来控制另一个逆变器10。另外,旋转电机控制装置1在第二速度区域vr2中,通过主动短路控制来控制第一逆变器11以及第二逆变器12中的一个逆变器10,通过不连续脉冲宽度调制控制(dpwm)来控制另一个逆变器10。另外,旋转电机控制装置1在第三速度区域vr3中,通过不连续脉冲宽度调制控制来控制第一逆变器11以及第二逆变器12这两个逆变器10。以下,将第一速度区域vr1、第二速度区域vr2、第三速度区域vr3中的这样的控制称为对象控制。
[0240]
[表14]
[0241]
rinv1inv2vr1asccpwmvr2ascdpwmvr3dpwmdpwm
[0242]
另外,在表1中,虽然例示了在第一速度区域vr1以及第二速度区域vr2中,通过主动短路控制来控制第一逆变器11的方式,但当然也可以是通过主动短路控制来控制第二逆变器12的方式。另外,也可以在第一速度区域vr1中通过主动短路控制来控制第一逆变器11,在第二速度区域vr2中通过主动短路控制来控制第二逆变器12等,在第一速度区域vr1和第二速度区域vr2中,使作为基于主动短路控制的控制对象的逆变器10不同(也包括相反的组合)。
[0243]
而且,在第一速度区域vr1以及第二速度区域vr2中,也可以根据根据预先规定的条件交替地切换控制第一逆变器11的控制方式和控制第二逆变器12的控制方式。通过切换控制方式,能够抑制仅第一逆变器11以及第二逆变器12中某一方消耗的情况,或仅第一直流电源61以及第二直流电源62中某一方的放电量增加的情况。在此,规定的条件例如优选是恒定的时间或直流电源6的放电量。
[0244]
在第一速度区域vr1以及第二速度区域vr2中,两个逆变器10中的一个逆变器10
(例如第一逆变器11)通过主动短路控制被控制。即,实质上仅由两个逆变器10中的一个逆变器10(例如第二逆变器12)来驱动旋转电机80。由于一个逆变器10不进行开关动作,因此能够降低相应的开关损耗,其结果,能够抑制系统整体的损耗的同时驱动旋转电机80。
[0245]
如本结构那样,在具有两个逆变器10的情况下,能够生成比各个逆变器10的直流侧的电压更大的振幅的交流电压。但是,旋转电机控制装置1不需要始终以交流的振幅变大的方式控制两个逆变器10,例如,在旋转电机80的转速为低速的情况下,存在只要生成能够由一个逆变器10能够生成的交流电压就足够的情况。若通过主动短路控制来控制两个逆变器10中的一个,则3相的定子线圈8在该一个逆变器10中被短路。在该情况下,另一个逆变器10驱动控制具有以具有中性点的方式连接的定子线圈8的旋转电机80。
[0246]
另外,如上所述,基于连续脉冲宽度调制的调制率在空间矢量脉冲宽度调制中比在正弦波脉冲宽度调制中大,并且在不连续脉冲宽度调制中比在空间矢量脉冲宽度调制中大。第二速度区域vr2是旋转电机80的转速高于第一速度区域vr1的控制区域,在第二速度区域vr2中要求比第一速度区域vr1高的调制率。通过在第一速度区域vr1中进行连续脉冲宽度调制控制,在第二速度区域vr2中进行不连续脉冲宽度调制控制,从而能够在将第一速度区域vr1和第二速度区域vr2合并起来的控制区域中,由一个逆变器10驱动旋转电机80。即,在将第一速度区域vr1和第二速度区域vr2合并起来的较宽的控制区域中,由于两个逆变器10中的一个逆变器10不进行开关动作,因此能够抑制系统整体的损耗来驱动旋转电机80。
[0247]
这样,优选地,各个控制区域r的边界(第一速度区域vr1、第二速度区域vr2和第三速度区域vr3的边界)根据与旋转电机80的扭矩对应的旋转电机80的转速和多相交流电压的线电压的有效值(可以是指令值,也可以是来自输出电压的换算值)相对于直流电压的比例中的至少一方来设定。
[0248]
如图48所例示,旋转电机80的动作条件通常根据转速与扭矩的关系被定义。控制区域r也可以基于作为一个参数的转速来设定。在此,虽然也可以不考虑扭矩而将规定控制区域r的边界的转速设定为恒定,但更优选将规定控制区域r的边界的转速设定为根据扭矩而不同的值。由此,能够根据旋转电机80的动作条件,以高的效率来驱动控制旋转电机80。
[0249]
另外,例如,在旋转电机80要求高的输出(快的转速、高的扭矩)的情况下,在电压型的逆变器中,通过使直流电压变高或使直流电压转换为交流电压的比例变高来实现该要求。在直流电压恒定的情况下,能够通过使直流电压转换为交流电压的比例变高来实现该要求。该比例能够表示为3相交流电力的有效值相对于直流电力的比例(在电压型的逆变器的情况下,与3相交流电压的有效值相对于直流电压的比例等价)。如上所述,在控制逆变器(10)的控制方式中,存在该比例从低到高的各种方式。
[0250]
如下述的表15所示,若控制区域r基于3相交流电力的有效值相对于根据对旋转电机80的要求而确定的直流电力的比例(调制率)来设定,则能够根据旋转电机80的动作条件,以高的效率来驱动控制旋转电机80。另外,在表中,“mi_inv1”表示第一逆变器11的调制率,“mi_inv2”表示第二逆变器12的调制率,“mi_sys”表示系统整体的调制率。
[0251]
[表15]
[0252]
rmi_sysinv1mi_inv1inv2mi_inv2vr1m<aascm=0cpwmm<2a
vr2a≤m<xascm=0dpwm2a≤m<2xvr3x≤m<0.78dpwmx≤m<0.78dpwmx≤m<0.78
[0253]
另外,如图49以及下述的表16所示,也可以还设定有在相同的扭矩下旋转电机80的转速高于第三速度区域vr3的第四速度区域vr4。在该情况下,旋转电机控制装置1在第四速度区域vr4中,通过矩形波控制来控制第一逆变器11以及第二逆变器12这两个逆变器10(参照图14)。如上所述,矩形波控制中的调制率为0.78。
[0254]
[表16]
[0255]
rmi_sysinv1mi_inv1inv2mi_inv2vr1m<aascm=0cpwmm<2avr2a≤m<xascm=0dpwm2a≤m<2xvr3x≤m<0.78dpwmx≤m<0.78dpwmx≤m<0.78vr4m=0.781-pulsem=0.781-pulsem=0.78
[0256]
在上述的表15以及表16中,例示了与各个控制区域r对应的调制率。在本实施方式中,第一直流电源61的端子间电压“e1”与第二直流电源62的端子间电压“e2”相同(均为电压“e”)。若将第一逆变器11的交流侧的有效值设为“va_inv1”,将第二逆变器12的交流侧的有效值设为“va_inv2”,则第一逆变器11的调制率“mi_inv1”、以及第二逆变器12的调制率“mi_inv2”如第一实施方式的说明中所示的式(1)、(2)所示(以下再次记载)。另外,系统整体的调制率“mi_sys”如式(3)所示(以下再次记载)。
[0257]
mi_inv1=va_inv1/e1=va_inv1/e
···
(1)
[0258]
mi_inv2=va_inv2/e2=va_inv2/e
···
(2)
[0259]
mi_sys=(va_inv1 va_inv2)/(e1 e2)
[0260]
ꢀꢀꢀꢀꢀꢀ
=(va_inv1 va_inv2)/2e
···
(3)
[0261]
就电压的瞬时值而言,需要考虑瞬时的矢量,但若单纯地仅考虑调制率,则由式(1)~(3)得出,系统整体的调制率“mi_sys”为“(mi_inv1 mi_inv2)/2”。另外,在表15以及表16中,示出了与各个控制区域r对应的调制率作为额定值。因此,在实际控制时,考虑到在控制区域r中控制方式变化时的波动等,也可以在与各个控制区域r对应的调制率中包含重叠的范围。
[0262]
另外,调制率“x”是根据基于连续脉冲宽度调制(空间矢量脉冲宽度调制)的调制率的理论上的上限值(大致为0.707),进而考虑死区时间来设定。如表15、表16等所示,在第一速度区域vr1以及第二速度区域vr2中,有时仅由一个逆变器10进行调制。因此,在第一速度区域vr1以及第二速度区域vr2中,一个逆变器10(在此为第二逆变器12)的最大调制率“2x”根据基于连续脉冲宽度调制控制的调制率的理论上的上限值(在空间矢量脉冲宽度调制大致为0.707),进而考虑死区时间,例如被设定为0.5~0.6左右。因此,调制率“x”例如被设定为0.25~0.3左右的值。调制率“a”基于实验、模拟等而适当地设定。
[0263]
关于表15以及表16所例示的方式中的各个控制区域r中的控制方式的、u相电压指令(vu1**,vu2**)以及u相上级侧开关控制信号(su1 ,su2 )的波形例,由于与在第一实施方式中参照图12~图16说明的相同,因此省略详细的说明。
[0264]
如上所述,在调制率以及转速相对低且电力相对低的区域即第一速度区域vr1以及第二速度区域vr2中,全部的电力从一个逆变器10被供给。此时,向一个逆变器10提供电
压指令(v**)以进行主动短路控制,向另一个逆变器10提供通常的电压指令(v**)。在调制率以及转速相对高且电力相对高的区域即第三速度区域vr3以及第四速度区域vr4中,从两个逆变器10供给相等的电力。此时,向两个逆变器10提供相位相差180度(π)的相同的电压指令(v**)。
[0265]
但是,在对逆变器10进行开关控制的情况下,存在与交流电流的基波重叠的脉动分量产生可听频带的噪声的情况。在以分别不同的控制方式控制两个逆变器10的情况下,产生与各个控制方式对应的脉动,从而可听频带的噪声可能增加。尤其在旋转电机80的转速为低速的情况下,脉动分量的频率(或其边带频率)包含于可听频带的可能性变高。旋转电机80的控制方式即逆变器10的控制方式根据动作条件而适当地设定,以能够实现高的系统效率下的动作和可听噪声的降低。
[0266]
本实施方式的旋转电机控制装置1具有作为旋转电机80的控制模式的损耗降低优先模式和噪声降低优先模式,并且能够对损耗降低优先模式和噪声降低优先模式进行切换。如上所述,旋转电机控制装置1在损耗降低优先模式下执行对象控制,在噪声降低优先模式下执行代替控制,以代替对象控制。具体而言,如下述的表17所示,旋转电机控制装置1在噪声降低优先模式下,在第一速度区域vr1中,通过连续脉冲宽度调制控制来控制第一逆变器11以及第二逆变器12这两个逆变器10,在第二速度区域vr2中,通过不连续脉冲宽度调制控制来控制第一逆变器11以及第二逆变器12这两个逆变器10,在第三速度区域vr3中,执行通过不连续脉冲宽度调制控制来控制第一逆变器11以及第二逆变器12这两个逆变器10的代替控制,以代替对象控制。
[0267]
[表17]
[0268]
rmi_sysinv1mi_inv1inv2mi_inv2vr1m<acpwmm<acpwmm<avr2a≤m<xdpwma≤m<xdpwma≤m<xvr3x≤m<0.78dpwmx≤m<0.78dpwmx≤m<0.78
[0269]
在设定有第四速度区域vr4的情况下也同样地,如下述的表18所示,旋转电机控制装置1在损耗降低优先模式下执行对象控制,在噪声降低优先模式下执行代替控制以代替对象控制。具体而言,旋转电机控制装置1在噪声降低优先模式下,在第四速度区域vr4中,执行通过矩形波控制来控制第一逆变器11以及第二逆变器12这两个逆变器10的代替控制,以代替对象控制。
[0270]
[表18]
[0271]
rmi_sysinv1mi_inv1inv2mi_inv2vr1m<acpwmm<acpwmm<avr2a≤m<xdpwma≤m<xdpwma≤m<xvr3x≤m
x
0.78dpwmx≤m<0.78dpwmx≤m<0.78vr4m=0.781-pulsem=0.781-pulsem=0.78
[0272]
在对逆变器10进行开关控制的情况下,存在与交流电流的基波重叠的脉动分量产生可听频带的噪声的情况。尤其在旋转电机80的转速为低速的情况下,脉动分量的频率(或其边带频率)包含于可听频带的可能性变高。例如,在以分别不同的控制方式控制两个逆变器10的情况下,产生与各个控制方式对应的脉动,从而可听频带的噪声可能增加。在损耗降
低优先模式下,由于在旋转电机80的转速相对较低的第一速度区域vr1以及第二速度区域vr2中仅驱动一个逆变器10,因此在两个逆变器10不会产生不同频带的噪声。但是,由于被驱动的一个逆变器10的输出变大,因此噪声的能量变高。另外,在第一速度区域vr1以及第二速度区域vr2中,随着车辆的行驶的声音(车轮与路面的接触声音等行驶声音)也较小,因此在从被驱动的一个逆变器10输出的噪声为可听频带的噪声的情况下,存在使利用者容易听到噪声的可能性。
[0273]
例如,在车辆起步时或减速停止时,考虑到利用者容易听到可听频带的噪声而选择噪声降低优先模式,在车辆进行稳定行驶的稳定运转时,优选选择损耗降低优先模式。另外,这些模式也可以通过利用者的操作(也包括来自设定开关(触摸面板等的输入))来选择。
[0274]
在噪声降低优先模式下,在旋转电机80的转速相对较低的第一速度区域vr1以及第二速度区域vr2中,以相同的控制方式控制第一逆变器11和第二逆变器12。另外,使电流在定子线圈8中流动的两个逆变器10的电流的相位相差大致180度。在以相同的控制方式控制两个逆变器10的情况下,包含脉动分量在内的电流的相位相差大致180度。因此,能够将脉动分量的至少一部分相互抵销,也能够降低可听频带的噪声。
[0275]
如表17所示,在噪声降低优先模式下,在第一速度区域vr1中,第一逆变器11以及第二逆变器12都通过连续脉冲宽度调制控制被控制(参照图16)。另外,在第二速度区域vr2中,与第三速度区域vr3同样地,第一逆变器11以及第二逆变器12都通过不连续脉冲宽度调制控制被控制(参照图15)。
[0276]
图50示出了作为比较例的3相的定子线圈8通过中性点连接的单逆变器系统中的旋转电机的控制区域的一例。如下述的表19所示,该逆变器例如在比较用第一区域vr11中通过连续脉冲宽度调制控制被控制,在比较用第二区域vr13中通过不连续脉冲宽度调制控制被控制,在比较用第三区域vr14中通过矩形波控制被控制。另外,从参照图20的第一实施方式的说明可知,第二实施方式中的比较用第一区域vr11与第一实施方式的第一区域vr11大致对应,第二实施方式中的比较用第二区域vr13与第一实施方式的第二区域vr12大致对应,第二实施方式中的比较用第三区域vr14与第一实施方式的第三区域vr13大致对应。
[0277]
[表19]
[0278]
rmi_sysinv1mi_invvr11m<y,where y>xcpwmm<y,where y>xvr13y≤m<0.78dpwmy≤m<0.78vr14m=0.781-pulsem=0.78
[0279]
在此,调制率“y”是比表15至表18所例示的调制率“x”更大的值,其根据基于连续脉冲宽度调制(空间矢量脉冲宽度调制)的调制率的理论上的上限值(大致为0.707),进而考虑死区时间,例如被设定为0.5~0.6左右。如上所述,在本实施方式中,通过在与比较用第一区域vr11相当的区域中设定第一速度区域vr1、第二速度区域vr2,从而能够在损耗降低优先模式下降低系统整体的损耗,在噪声降低优先模式下降低损耗同时降低噪声。
[0280]
另外,从图49与图50的比较、表19与表15的比较、表19与表16的比较等可知,在与比较用第一区域vr11相当的区域中,不仅能够设定第一速度区域vr1、第二速度区域vr2,还能够设定第三速度区域vr3的一部分。即,在比较用第一区域vr11的高速度侧能够设定第三
速度区域vr3的一部分。由此,在更低速度侧的控制区域中执行不连续脉冲宽度调制控制的区域被扩大,通过减少电流纹波以及减少开关损耗能够减少系统损耗。即,通过将系统效率高的控制区域扩大到更低速度侧,能够提高系统整体的效率。
[0281]
以下,参照在第一实施方式的说明中参照的图21~图26、图28、图29、图31、图32(单逆变器系统与双逆变器系统的比较例,双逆变器系统中的控制方式的比较例)进行说明。图21至图26示出了相对低的低速度区域(例如,比较用第一区域vr11、第一速度区域vr1)中的比较例。图28、图29、图31、图32示出了更高的高速度区域(例如,比较用第二区域vr13、第三速度区域vr3)中的比较例。另外,在这些图中也示出了与在第一实施方式中采用的混合连续脉冲宽度调制控制(mx-cpwm)相关的波形例,但在第二实施方式中,由于不进行混合连续脉冲宽度调制控制(mx-cpwm),因此忽略该波形进行说明。
[0282]
如图24以及图26所示,u相电流iu以及uv线电压vuv中的载波ca的频率的2倍的频率“2f”的边带频率“2f
±
fm”的谐波分量在双逆变器系统中的“asc/cpwm”方式下比在单逆变器系统以及双逆变器系统中的“cpwm/cpwm”方式下更小。因此,能够抑制铁损,并且在“asc/cpwm”方式下,由于一个逆变器10不进行开关动作,因此能降低开关损耗,从而能适当地降低整体的系统损耗。因此,如上所述,在优先降低系统损耗的情况下(损耗降低优先模式的情况),优选在第一速度区域vr1中选择“asc/cpwm”方式。
[0283]
另一方面,如图23以及图25所示,u相电流iu以及uv线电压vuv中的载波ca的频率“f”的边带频率“f
±
3fm”的谐波分量在双逆变器系统中的“cpwm/cpwm”方式下最小。虽说人的可听频率大致为20[hz]~15[khz]左右,但超过10[khz]的频率通常很难听到,5[khz]附近的频率很容易被视为噪音。即,载波ca的频率“f”的边带频率为“f
±
3fm”,5[khz]周边的谐波分量与“2f”的边带频率“2f
±
fm”即10[khz]周边的谐波分量相比,更容易成为可听噪声。因此,如本例所示,在载波ca的频率“f”为5[khz],并且优先抑制边带频率“f
±
3fm”的谐波分量变为可听噪声的情况下(噪声降低优先模式的情况下),优选在第一速度区域vr1中选择“cpwm/cpwm”方式。
[0284]
另外,如图24以及图26所示,在单逆变器系统中的“cpwm”和双逆变器系统中的“cpwm/cpwm”方式中,u相电流iu以及uv线电压vuv中的载波ca的频率的2倍的频率“2f”的边带频率“2f
±
fm”的谐波分量大致相等。因此,在转速相对低且可听噪声容易引人注目的区域中,优选地,选择噪声降低优先模式并以“cpwm/cpwm”方式进行控制。
[0285]
图28示出了如参照表19以及图50所述那样的在比较用第二区域vr13中在单逆变器系统中执行不连续脉冲宽度调制控制的情况的波形例以及fft解析结果例。各波形的说明与参照图28的第一实施方式中的说明相同。
[0286]
图29示出了如参照表14至表18、图48、图49等所述那样的在双逆变器系统中对两个逆变器10执行不连续脉冲宽度调制控制的情况(执行“dpwm/dpwm”方式的控制的情况)的波形例以及fft解析结果例。各波形的说明与参照图29的第一实施方式中的说明相同。
[0287]
图31示出了参照表19所述的单逆变器系统中的旋转电机80的转速与可听噪声之间的关系,图32示出了参照表17以及表18所述的本实施方式(第二实施方式)的双逆变器系统中的旋转电机80的转速与可听噪声之间的关系。另外,在图31的单逆变器系统中,根据调制率以及旋转电机80的转速,如参照图50以及表19所述,控制区域从比较用第一区域vr11变为比较用第二区域vr13,控制方式从连续脉冲宽度调制控制(cpwm)切换为不连续脉冲宽
度调制控制(dpwm)。另外,在图32的双逆变器系统中,根据调制率以及旋转电机80的转速,如参照图48、图49、表17以及表18所述,控制区域从第一速度区域vr1变为第二速度区域vr2,控制方式从“cpwm/cpwm”方式切换为“dpwm/dpwm”方式。
[0288]
从比较图28与图29可知,与在双逆变器系统中执行“dpwm/dpwm”方式的控制的情况相比,在单逆变器系统中执行“dpwm”的控制的情况下,在3相电流中重叠有更多的纹波。因此,如fft解析结果所示,与双逆变器系统相比,在单逆变器系统中产生更多的载波ca的频率“f”的边带频率“f
±
3fm”的谐波分量。该边带频率“f
±
3fm”的谐波分量有时与低次的谐波分量(11th,13th)重叠。
[0289]
另外,从比较图31与图32可知,在单逆变器系统中,如图31所示,根据旋转电机80的速度而产生的旋转电机80的噪声(将转速的频率设为“fm”的“12fm”的可听噪声)与边带频率“f
±
3fm”的可听噪声在由虚线的圆包围的部分重叠,因而可听噪声变得非常大。另一方面,如图32所示,在双逆变器系统中,由于几乎不会产生载波ca的频率“f”的边带频率“f
±
3fm”的可听噪声,因此根据旋转电机80的速度而产生的旋转电机80的可听噪声(12fm)与该边带频率“f
±
3fm”的可听噪声不会重叠。因此,与单逆变器系统相比,双逆变器系统能够构建静音性高的系统。
[0290]
(实施方式的概要)
[0291]
以下,对上述说明的旋转电机控制装置(1)的概要进行简单说明。
[0292]
作为一个方式的旋转电机控制装置(1),通过第一逆变器(11)以及第二逆变器(12)来驱动控制具有相互独立的多相开路绕组(8)的旋转电机(80),其中,所述第一逆变器(11)与所述多相开路绕组(8)的一端侧连接,在直流与多相交流之间转换电力,所述第二逆变器(12)与所述多相开路绕组(8)的另一端侧连接,在直流与多相交流之间转换电力,所述第一逆变器(11)和所述第二逆变器(12)分别能够以开关模式不同的多个控制方式进行控制,并且能够以相互独立的所述控制方式进行控制,作为所述旋转电机(80)的控制区域(r),设定有第一速度区域(vr1)和在相同的扭矩(t)下所述旋转电机(80)的转速高于所述第一速度区域(vr1)的第二速度区域(vr2),所述控制方式包括:脉冲宽度调制控制,在电角度的一个周期中输出模式不同的多个脉冲;以及混合脉冲宽度调制控制,进行控制以在电角度的1/2周期即第一期间(t1)中输出模式不同的多个脉冲,在剩余的1/2周期即第二期间(t2)中持续非有效状态,在所述第二速度区域(vr2)中,通过所述混合脉冲宽度调制控制来控制所述第一逆变器(11)以及所述第二逆变器(12)这两个逆变器(10)。
[0293]
混合脉冲宽度调制控制是在电角度的每一个周期的期间内的大致半个周期将进行脉冲宽度调制的期间和无调制(固定状态)的期间组合的控制方式。即,由于逆变器(10)在驱动时间的大致1/2的期间中不进行开关动作,因此能降低开关损耗,从而能降低系统损耗。执行混合脉冲宽度调制控制的第二速度区域(vr2)在相同的扭矩(t)下设定在比第一速度区域(vr1)更靠高速度侧,并且是相对中速度/高速度侧的控制区域。根据本结构,在旋转电机(80)的全部动作区域中,通过降低相对中速度/高速度侧的控制区域中的系统损耗,从而能够降低全部动作区域中的整体的系统损耗。这样,根据本结构,能够适当地控制在开路绕组的两端分别具有的两个逆变器。
[0294]
另外,优选地,所述脉冲宽度调制控制是基于指令值和载波而生成多个脉冲的控制,所述混合脉冲宽度调制控制是基于所述指令值的变化域的1/2的波高的所述载波即半
载波和所述指令值而生成多个脉冲的控制,所述混合脉冲宽度调制控制通过以下方式生成多个脉冲:双半载波单参考方式,基于作为所述半载波而设定在比所述指令值的振幅中心更靠高电压侧和低电压侧中的一方的第一半载波(ca1)和所述第一逆变器(11)以及第二逆变器(12)共用的所述指令值(vu**),来生成所述第一逆变器(11)用的脉冲,基于具有与所述第一半载波(ca1)相同的相位且设定在比所述指令值的振幅中心更靠高电压侧和低电压侧中的另一方的第二半载波(ca2)和所述指令值(vu**),来生成所述第二逆变器(12)用的脉冲;或者双半载波双参考方式,基于作为所述半载波而设定在比所述指令值的振幅中心更靠高电压侧和低电压侧中的一方的第一半载波(ca1)和所述第一逆变器(11)用的第一指令值(vu1**),来生成所述第一逆变器(11)用的脉冲,基于具有与所述第一半载波(ca1)相差180度的相位且设定在与所述第一半载波(ca1)相同的一侧的第二半载波(ca2)和相位与所述第一指令值(vu1**)相差180度的所述第二逆变器(12)用的第二指令值(vu2**),来生成所述第二逆变器(12)用的脉冲。
[0295]
在混合脉冲宽度调制控制的控制方式中,除了上述的双半载波单参考方式以及双半载波双参考方式之外,还可以采用单半载波双参考方式等。单半载波双参考方式是基于共用的半载波和相位彼此相差180度的两个指令值来生成脉冲的方式。根据发明人的模拟、实验能够确认,与单半载波双参考方式相比,双半载波单参考方式以及双半载波双参考方式尤其能抑制载波(ca)的频率中的谐波噪声。因此,混合脉冲宽度调制控制优选通过双半载波单参考方式或者双半载波双参考方式来执行。
[0296]
另外,优选地,在所述第一逆变器(11)以及所述第二逆变器(12)中,交流1相的臂(3a)分别由上级侧开关元件(3h)和下级侧开关元件(3l)的串联电路构成,所述控制方式还包括主动短路控制,在该主动短路控制中,将多相的全部的所述臂(3a)的所述上级侧开关元件(3h)设为接通状态或者将多相的全部的所述臂(3a)的所述下级侧开关元件(3l)设为接通状态,旋转电机控制装置(1)在所述第一速度区域(vr1)中,执行通过所述主动短路控制来控制所述第一逆变器(11)以及所述第二逆变器(12)中的一个所述逆变器(10),并且通过所述脉冲宽度调制控制来控制另一个所述逆变器(10)的对象第一速度区域控制。
[0297]
如本结构那样,在具有两个逆变器(10)的情况下,能够生成比各个逆变器(10)的直流侧的电压大的振幅的交流电压。但是,旋转电机控制装置(1)不需要始终以交流的振幅变大的方式控制两个逆变器(10),例如,在旋转电机(80)的转速为低速的情况下,存在只要生成能够由一个逆变器(10)能够生成的交流电压就足够的情况。根据本结构,在相同的扭矩下比第二速度区域(vr2)更靠低速度侧的第一速度区域(vr1)中,两个逆变器(10)中的一个逆变器(10)通过主动短路控制被控制。由此,开路绕组(8)彼此在该一个逆变器(10)中被短路,旋转电机(80)与定子线圈具有电中性点的旋转电机相同。即,实质上仅由两个逆变器(10)中的一个逆变器(10)驱动旋转电机(80)。由于通过主动短路控制被控制的逆变器(10)不进行开关动作,因此能够抑制系统整体的损耗,并且能够驱动旋转电机(80)。
[0298]
另外,优选地,旋转电机控制装置(1)在所述第一速度区域(vr1)中,根据预先规定的条件交替地切换控制所述第一逆变器(11)的所述控制方式和控制所述第二逆变器(12)的所述控制方式。
[0299]
通过切换控制方式,能够抑制仅第一逆变器(11)以及第二逆变器(12)中的某一方消耗的情况。另外,第一逆变器(11)以及第二逆变器(12)分别与相互独立的直流电源(6)连
接的情况下,能够抑制仅与第一逆变器(11)连接的直流电源(61)以及与第二逆变器(12)连接的直流电源(62)中的某一方的电力消費量增加的情况。在此,规定的条件优选是指例如恒定的时间或直流电源(6)的电力消费量。
[0300]
另外,优选地,在所述脉冲宽度调制控制中,作为所述控制方式包括有:连续脉冲宽度调制控制,对多相的全部的所述臂(3a)连续地执行脉冲宽度调制;以及不连续脉冲宽度调制控制,对多相的一部分的所述臂(3a),包含将开关元件(3)固定为接通状态或者断开状态的期间地进行脉冲宽度调制,旋转电机控制装置(1)在所述第一速度区域(vr1)内的低速度侧的低速度侧第一速度区域(vr1-1)中,通过所述主动短路控制来控制所述第一逆变器(11)以及所述第二逆变器(12)中的一个所述逆变器(10),并且通过所述连续脉冲宽度调制控制来控制另一个所述逆变器(10),在所述第一速度区域(vr1)内的高速度侧的高速度侧第一速度区域(vr2-2)中,通过所述主动短路控制来控制所述第一逆变器(11)以及所述第二逆变器(12)中的一个所述逆变器(10),并且通过所述不连续脉冲宽度调制控制来控制另一个所述逆变器(10)。
[0301]
在高速度侧第一速度区域(vr1-2)中执行的不连续脉冲宽度调制控制的最大调制率大于在低速度侧第一速度区域(vr1-1)中执行的连续脉冲宽度调制控制的最大调制率。高速度侧第一速度区域(vr1-2)是在相同的扭矩(t)下旋转电机(80)的转速高于低速度侧第一速度区域(vr1-1)的控制区域(r),从系统效率的观点来看,优选在高速度侧第一速度区域(vr1-2)中以比低速度侧第一速度区域(vr1-1)的调制率更高的调制率进行调制。通过在低速度侧第一速度区域(vr1-1)中进行连续脉冲宽度调制控制,并且在高速度侧第一速度区域(vr1-2)中进行不连续脉冲宽度调制控制,从而能够在整个第一速度区域(vr1)中,通过一个逆变器(10)适当地驱动旋转电机(80)。
[0302]
另外,优选地,在所述第一速度区域(vr1)中,执行通过所述混合脉冲宽度调制控制来控制所述第一逆变器(11)以及所述第二逆变器(12)这两个逆变器(10)的对象第一速度区域控制。
[0303]
即使在具有两个逆变器(10)的情况下,例如在旋转电机(80)的转速为低速的情况下,存在只要生成能够由一个逆变器(10)能够生成的交流电压就足够的情况。混合脉冲宽度调制控制是在电角度的每一个周期的期间内的大致半个周期将进行脉冲宽度调制的期间和无调制(固定状态)的期间组合的控制方式。即,每1/2周期,实质上仅由两个逆变器(10)中的一个逆变器(10)驱动旋转电机(80)。由于逆变器(10)在驱动时间的大致1/2的期间中不进行开关动作,因此能降低开关损耗,从而能降低系统损耗。
[0304]
优选地,在旋转电机控制装置(1)中,作为所述旋转电机(80)的控制模式,具有损耗降低优先模式和噪声降低优先模式,并且能够对所述损耗降低优先模式和所述噪声降低优先模式进行切换,在所述损耗降低优先模式中,在所述第一速度区域(vr1)中,执行所述对象第一速度区域控制,在所述噪声降低优先模式中,在所述第一速度区域(vr1)中,执行通过所述脉冲宽度调制控制来控制所述第一逆变器(11)以及所述第二逆变器(12)这两个所述逆变器(10)的代替第一速度区域控制,以代替所述对象第一速度区域控制。
[0305]
在对逆变器(10)进行开关控制的情况下,存在与交流电流的基波重叠的脉动分量产生可听频带的噪声的情况。尤其在旋转电机(80)的转速为低速的情况下,脉动分量的频率(或其边带频率)包含于可听频带中的可能性变高。在对象控制中,在一个逆变器(10)通
过主动短路控制被控制的情况下,通过脉冲宽度调制控制被控制的逆变器(10)的输出比使用两个逆变器(10)的情况变大。即,噪声的能量也变高。与使用一个逆变器(10)的情况相比,在使用两个逆变器(10)的情况下,能够使噪声的能量变小,并且能够控制两个逆变器(10),以使噪声分量相互抵销。在噪声降低优先模式中,由于以相同的控制方式来控制第一逆变器(11)和第二逆变器(12),因此容易进行噪声分量被抵销那样的控制。根据本结构,作为所述旋转电机(80)的控制模式,具有损耗降低优先模式和噪声降低优先模式,并且能够对所述损耗降低优先模式和所述噪声降低优先模式进行切换,由此,能够根据动作条件适当地控制两个逆变器(10),因而能够兼顾高系统效率的动作和噪声的降低。
[0306]
另外,优选地,在所述第一逆变器(11)以及所述第二逆变器(12)中,交流1相的臂(3a)分别由上级侧开关元件(3h)和下级侧开关元件(3l)的串联电路构成,所述混合脉冲宽度调制控制包括:混合连续脉冲宽度调制控制,在所述第二期间(t2)中以持续非有效状态的方式进行控制,并且在所述第一期间(t1)中对多相的全部的所述臂(3a)连续地执行脉冲宽度调制;以及混合不连续脉冲宽度调制控制,在所述第二期间(t2)中以持续非有效状态的方式进行控制,并且在所述第一期间(t1)中对一部分的多相的所述臂(3a),包含将开关元件固定为接通状态或者断开状态的期间地进行脉冲宽度调制,旋转电机控制装置(1)在所述第二速度区域(vr2)内的低速度侧的低速度侧第二速度区域(vr2-1)中,通过所述混合连续脉冲宽度调制控制来控制所述第一逆变器(11)以及所述第二逆变器(12)这两个所述逆变器(10),在所述第二速度区域(vr2)内的高速度侧的高速度侧第二速度区域(vr2-2)中,通过所述混合不连续脉冲宽度调制控制来控制所述第一逆变器(11)以及所述第二逆变器(12)这两个所述逆变器(10)。
[0307]
混合脉冲宽度调制控制是在电角度的每一个周期的期间内的大致半个周期将进行脉冲宽度调制的期间和无调制(固定状态)的期间组合的控制方式。在混合连续脉冲宽度调制控制中,执行连续脉冲宽度调制作为脉冲宽度调制的方式,在混合不连续脉冲宽度调制控制中,执行不连续脉冲宽度调制作为脉冲宽度调制的方式。不连续脉冲宽度调制控制的最大调制率大于连续脉冲宽度调制控制的最大调制率。高速度侧第二速度区域(vr2-2)是在相同的扭矩(t)下旋转电机(80)的转速比低速度侧第二速度区域(vr2-1)更高的控制区域(r),从系统效率的观点来看,优选在高速度侧第二速度区域(vr2-2)中以比低速度侧第二速度区域(vr2-1)的调制率更高的调制率进行调制。通过在低速度侧第二速度区域(vr2-1)中执行组合了连续脉冲宽度调制控制的混合连续脉冲宽度调制控制,在高速度侧第二速度区域(vr2-2)中执行组合了不连续脉冲宽度调制控制的混合不连续脉冲宽度调制控制,从而能够在整个第二速度区域(vr2)中,适当地驱动旋转电机(80)。
[0308]
另外,作为所述控制方式也可以包括有不连续脉冲宽度调制控制,在所述不连续脉冲宽度调制控制中,对多相的一部分的所述臂(3a),包含将开关元件固定为接通状态或者断开状态的期间地进行脉冲宽度调制,旋转电机控制装置(1)在所述高速度侧第二速度区域(vr2-2)中,也可以通过所述不连续脉冲宽度调制控制来控制所述第一逆变器(11)以及所述第二逆变器(12)这两个所述逆变器(10),以代替所述混合不连续脉冲宽度调制控制。
[0309]
高速度侧第二速度区域(vr2-2)被设定在旋转电机(80)的控制区域(r)中相对高的高速度侧,因此需要相对高的调制率的可能性也高。混合脉冲宽度调制控制是在电角度
的每一个周期的期间内的大致半个周期将进行脉冲宽度调制的期间和无调制(固定状态)的期间组合的控制方式。即,由于混合脉冲宽度调制控制包括无调制的期间,因此与在整个周期进行脉冲宽度调制的情况相比,最大调制率变低。因此,在需要更高的调制率等的情况下,在高速度侧第二速度区域(vr2-2)中,代替混合不连续脉冲宽度调制而通过不连续脉冲宽度调制控制来控制两个逆变器(10),从而能够适当地驱动旋转电机(80)。
[0310]
另外,优选地,旋转电机控制装置(1)在所述第一速度区域(vr1)中,在执行通过所述混合脉冲宽度调制控制来控制所述第一逆变器(11)以及所述第二逆变器(12)这两个逆变器(10)的对象第一速度区域控制的情况下,在所述第一速度区域(vr1)以及所述第二速度区域(vr2)中,在作为预先规定的扭矩的规定扭矩(tref)以上的高扭矩区域(vrh)中,通过所述脉冲宽度调制控制来控制所述第一逆变器(11)以及所述第二逆变器(12)这两个逆变器(10),在小于所述规定扭矩(tref)的低扭矩区域(vrl)中,通过所述混合脉冲宽度调制控制来控制所述第一逆变器(11)以及所述第二逆变器(12)这两个逆变器(10)。
[0311]
在执行对象第一速度区域控制的情况下,在第一速度区域(vr1)以及第二速度区域(vr2)中,第一逆变器(11)以及第二逆变器(12)这两个逆变器(10)通过混合脉冲宽度调制控制进行控制。根据发明人的实验或模拟能够确认,在第一速度区域(vr1)以及第二速度区域(vr2)中的高扭矩区域(vrh)中,与旋转电机(80)的转速的频率的谐波分量对应的纹波分量在直流总线电流(idc)上呈现。通常,在逆变器(10)的直流侧具有使直流电源(6)或直流总线电压(直流链路电压(vdc))平滑化的直流链路电容器(4)(平滑电容器)。直流总线电流(idc)的纹波分量有可能会缩短直流电源(6)或直流链路电容器(4)的寿命。通过增大直流链路电容器(4)的容量,虽然能够使纹波减少,但可能会导致直流链路电容器(4)的体积的大型化或成本的上升。因此,优选使直流总线电流(idc)的纹波减少。根据本结构,在这样的纹波变大的高扭矩区域(vrh)中,不执行混合脉冲宽度调制控制,而执行脉冲宽度调制控制。根据发明人的试验、模拟能够确认,即使在高扭矩区域(vrh)中,通过脉冲宽度调制控制来控制第一逆变器(11)以及第二逆变器(12)这两个逆变器(10),从而减少直流总线电流(idc)的纹波。即,根据本结构,在第一速度区域(vr1)以及第二速度区域(vr2)中,即使通过混合脉冲宽度调制控制来控制两个逆变器(10)的情况下,也能够适当地减少直流总线电流(idc)的纹波。
[0312]
另外,如上所述,优选地,在旋转电机控制装置(1)在高扭矩区域(vrh)中,通过所述脉冲宽度调制控制来控制所述第一逆变器(11)以及所述第二逆变器(12)这两个逆变器(10),在小于所述规定扭矩(tref)的低扭矩区域(vrl)中,通过所述混合脉冲宽度调制控制来控制所述第一逆变器(11)以及所述第二逆变器(12)这两个逆变器(10)的情况下,在所述第一逆变器(11)以及所述第二逆变器(12)中,每个交流1相的臂(3a)由上级侧开关元件(3h)和下级侧开关元件(3l)的串联电路构成,在所述脉冲宽度调制控制中,作为所述控制方式包括有:连续脉冲宽度调制控制,对多相的全部的所述臂(3a)连续地执行脉冲宽度调制;以及不连续脉冲宽度调制控制,对多相的一部分的所述臂(3a),包含将开关元件(3)固定为接通状态或断开状态的期间地进行脉冲宽度调制,所述混合脉冲宽度调制控制包括:混合连续脉冲宽度调制控制,在所述第二期间(t2)中以持续非有效状态的方式进行控制,并且在所述第一期间(t1)中对多相的全部的所述臂(3a)连续地执行脉冲宽度调制;以及混合不连续脉冲宽度调制控制,在所述第二期间(t2)中以持续非有效状态的方式进行控制,
并且在所述第一期间(t1)中,对多相的一部分的所述臂(3a),包含将开关元件(3)固定为接通状态或断开状态的期间地进行脉冲宽度调制,将所述第二速度区域(vr2)内的低速度侧的区域设为低速度侧第二速度区域(vr2-1),将所述第二速度区域(vr2)内的高速度侧的区域设为高速度侧第二速度区域(vr2-2),旋转电机控制装置(1)在所述第一速度区域(vr1)以及所述低速度侧第二速度区域(vr2-1)中的所述低扭矩区域(vrl)中,通过所述混合连续脉冲宽度调制控制来控制所述第一逆变器(11)以及所述第二逆变器(12)这两个所述逆变器(10),在所述高速度侧第二速度区域(vr2-2)中的所述低扭矩区域(vrl)中,通过所述混合不连续脉冲宽度调制控制来控制所述第一逆变器(11)以及所述第二逆变器(12)这两个所述逆变器(10),在所述第一速度区域(vr1)中的所述高扭矩区域(vrh)中,通过所述连续脉冲宽度调制控制来控制所述第一逆变器(11)以及所述第二逆变器(12)这两个所述逆变器(10),在所述第二速度区域(vr2)中的所述高扭矩区域(vrh)中,通过所述不连续脉冲宽度调制控制来控制所述第一逆变器(11)以及所述第二逆变器(12)这两个所述逆变器(10)。
[0313]
混合连续脉冲宽度调制控制适当的控制区域(r)和连续脉冲宽度调制控制适当的控制区域(r)不完全一致,混合不连续脉冲宽度调制控制适当的控制区域(r)和不连续脉冲宽度调制控制适当的控制区域(r)也不完全一致。因此,例如在低扭矩区域(vrl)中执行混合脉冲宽度控制,在高扭矩区域(vrh)中执行脉冲宽度调制控制的情况下,不限定于单纯在混合连续脉冲宽度调制控制与连续脉冲宽度调制控制之间切换控制方式,只要在混合不连续脉冲宽度调制控制与不连续脉冲宽度调制控制之间切换控制方式即可。根据发明人的实验、模拟能够确认,如上所述,优选地,在第一速度区域(vr1)以及低速度侧第二速度区域(vr2-1)中的低扭矩区域(vrl)中,通过混合连续脉冲宽度调制控制来控制第一逆变器(11)以及第二逆变器(12)这两个逆变器(10),在高速度侧第二速度区域(vr2-2)中的低扭矩区域(vrl)中,通过混合不连续脉冲宽度调制控制来控制第一逆变器(11)以及第二逆变器(12)这两个逆变器(10),在第一速度区域(vr1)中的高扭矩区域(vrh)中,通过连续脉冲宽度调制控制来控制第一逆变器(11)以及第二逆变器(12)这两个逆变器(10),在第二速度区域(vr2)中的高扭矩区域(vrh)中,通过不连续脉冲宽度调制控制来控制第一逆变器(11)以及第二逆变器(12)这两个逆变器(10)。根据该结构,在第一速度区域(vr1)以及第二速度区域(vr2)的全部区域中,能够适当地驱动旋转电机(80)。
[0314]
另外,优选地,各个控制区域(r)的边界根据与所述旋转电机(80)的扭矩对应的所述旋转电机(80)的转速和多相交流电压的线电压的有效值相对于直流总线电压的比例中的至少一个来设定。
[0315]
旋转电机(80)的动作条件通常通过转速与扭矩之间的关系来定义。旋转电机控制装置(1)若基于一个参数即转速,来改变控制第一逆变器(11)以及第二逆变器(12)的控制方式,则能够根据旋转电机(80)的动作条件以高的效率来驱动控制旋转电机(80)。另外,例如,在旋转电机(80)要求高的输出(快的转速、高的扭矩)的情况下,在电压型的逆变器中,通过使直流总线电压变高或者使直流总线电压转换为交流电压的比例变高来实现该要求。在直流总线电压恒定的情况下,能够通过使直流总线电压转换为交流电压的比例变高来实现该要求。该比例能够表示为3相交流电力的有效值相对于直流电力的比例(在电压型的逆变器的情况下,与3相交流电压的线电压的有效值相对于直流总线电压的比例等价)。在控制逆变器(10)的控制方式中,存在该比例从低到高的各种方式。通过基于有效值来改变控
制方式,能够根据旋转电机(80)的动作条件,以高的效率来驱动控制旋转电机(80)。
[0316]
另外,优选地,作为所述控制方式,还具有在电角度的一个周期中输出一个脉冲的矩形波控制,还设定有在相同的扭矩(t)下所述旋转电机(80)的转速高于所述第二速度区域(vr2)的第三速度区域(vr3),旋转电机控制装置(1)在所述第三速度区域(vr3)中,通过所述矩形波控制来控制所述第一逆变器(11)以及所述第二逆变器(12)这两个所述逆变器(10)。
[0317]
脉冲宽度调制控制在旋转的平滑性方面优于矩形波控制,但矩形波控制能够在物理上(数学上)通过最高值的调制率驱动旋转电机(80)。作为控制方式,若除了脉冲宽度调制控制还能够执行矩形波控制,则能够提高控制的灵活性,从而能够根据旋转电机(80)的动作条件,以高的效率来驱动控制旋转电机(80)。
[0318]
另外,作为另一个方式的旋转电机控制装置(1),通过第一逆变器(11)以及第二逆变器(12)来驱动控制具有相互独立的多相开路绕组(8)的旋转电机(80),其中,所述第一逆变器(11)与所述多相开路绕组(8)的一端侧连接,在直流与多相交流之间转换电力,所述第二逆变器(12)与所述多相开路绕组(8)的另一端侧连接,在直流与多相交流之间转换电力,在所述第一逆变器(11)以及所述第二逆变器(12)中,交流1相的臂(3a)分别由上级侧开关元件(3h)和下级侧开关元件(3l)的串联电路构成,作为所述第一逆变器(11)以及所述第二逆变器(12)的控制方式至少具有:脉冲宽度调制控制,在电角度的一个周期中输出模式不同的多个脉冲;以及主动短路控制,将多相的全部的所述臂(3a)的所述上级侧开关元件(3h)设为接通状态或者将多相的全部的所述臂(3a)的所述下级侧开关元件(3l)设为接通状态,并且,在所述脉冲宽度调制控制中,作为所述控制方式包括有:连续脉冲宽度调制控制,对多相的全部的所述臂(3a)连续地执行脉冲宽度调制;以及不连续脉冲宽度调制控制,对多相的一部分的所述臂(3a),包含将开关元件(3)固定为接通状态或者断开状态的期间地进行脉冲宽度调制,所述第一逆变器(11)和所述第二逆变器(12)分别能够以相互独立的所述控制方式进行控制,作为所述旋转电机(80)的控制区域(r)设定有:第一速度区域(vr1);第二速度区域(vr2),在相同的扭矩下所述旋转电机(80)的转速高于所述第一速度区域(vr1);以及第三速度区域(vr3),在相同的扭矩下所述旋转电机(80)的转速高于所述第二速度区域(vr2),在所述第一速度区域(vr1)中,通过所述主动短路控制来控制所述第一逆变器(11)以及所述第二逆变器(12)中的一个逆变器(10),并且通过所述连续脉冲宽度调制控制来控制另一个所述逆变器(10),在所述第二速度区域(vr2)中,通过所述主动短路控制来控制所述第一逆变器(11)以及所述第二逆变器(12)中的一个所述逆变器(10),并且通过所述不连续脉冲宽度调制控制来控制另一个所述逆变器(10),在所述第三速度区域(vr3)中,执行通过所述不连续脉冲宽度调制控制来控制所述第一逆变器(11)以及所述第二逆变器(12)这两个所述逆变器(10)的对象控制。
[0319]
如本结构那样,在具有两个逆变器(10)的情况下,能够生成比各个逆变器(10)的直流侧的电压更大的振幅的交流电压。但是,旋转电机控制装置(1)不需要始终以交流的振幅变大的方式控制两个逆变器(10),例如在旋转电机(80)的转速为低速的情况下,存在只要生成能够由一个逆变器(10)能够生成的交流电压就足够的情况。根据本结构,在第一速度区域(vr1)以及第二速度区域(vr2)中,通过主动短路控制来控制两个逆变器(10)中的一个逆变器(10)。由此,开路绕组(8)彼此在该一个逆变器(10)中被短路,旋转电机(80)与定
子线圈具有电中性点的旋转电机相同。即,实质上仅由两个逆变器(10)中的一个逆变器(10)驱动旋转电机(80)。由于通过主动短路控制被控制的逆变器(10)不进行开关动作,因此能够在抑制系统整体损耗的同时驱动旋转电机(80)。另外,在第二速度区域(vr2)中执行的不连续脉冲宽度调制控制的最大调制率大于在第一速度区域(vr1)中执行的连续脉冲宽度调制控制的最大调制率。第二速度区域(vr2)是在相同的扭矩(t)下旋转电机(80)的转速高于第一速度区域(vr1)的控制区域,从系统效率的观点来看,优选在第二速度区域(vr2)中以比第一速度区域(vr1)的调制率更高的调制率进行调制。通过在第一速度区域(vr1)中执行连续脉冲宽度调制控制,在第二速度区域(vr2)中执行不连续脉冲宽度调制控制,从而能够在将第一速度区域(vr1)和第二速度区域(vr2)合并起来的控制区域中,通过一个逆变器(10)适当地驱动旋转电机(80)。另外,由于在旋转电机(80)的转速高于第二速度区域(vr2)的第三速度区域(vr3)中,通过不连续脉冲宽度调制控制来控制两个逆变器(10),因此,在开路绕组(8)中,能够产生比由一个直流电源(6)能够生成的电压高的线电压来驱动旋转电机(80)。这样,根据本结构,能够适当地控制在开路绕组的两端分别具有的两个逆变器。
[0320]
附图标记的说明:
[0321]
1:旋转电机控制装置、3:开关元件、3a:臂、3h:上级侧开关元件、3l:下级侧开关元件、8:定子线圈(开路绕组)、10:逆变器、11:第一逆变器、12:第二逆变器、80:旋转电机、r:控制区域、t:扭矩、t1:第一期间、t2:第二期间、vr1:第一速度区域、vr1-1:低速度侧第一速度区域、vr1-2:高速度侧第一速度区域、vr2:第二速度区域、vr2-1:低速度侧第二速度区域、vr2-2:高速度侧第二速度区域、vr3:第三速度区域、vr4:第四速度区域、vrh:高扭矩区域、vrl:低扭矩区域
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。