1.本发明涉及消防技术领域,具体涉及一种仓库灭火器远程监控系统及方法。
背景技术:
2.现有技术中,虽然具有火灾防控系统,如有基于烟感探头和喷头的楼宇自动化智能系统,室内消防系统指安装在室内,用以扑灭发生在建筑物内初起的火灾的设施系统。它主要有室内消火栓系统、自动喷水消防系统、水雾灭火系统、泡沫灭火系统、二氧化碳灭火系统、卤代烷灭火系统、干粉灭火系统等。根据火灾统计资料证明,安装室内消防系统是有效的和必要的安全措施,但是传统的消防装置基本基于人为控制,缺乏智能性。
3.现有的灭火装置主要是手持灭火器,灭火机动性强,并可以配合自动灭火系统使用,在仓库存放货物中,不同的货物耐火温度不同,人员不能对货物情况进行判断灭火能力,造成灭火能力不足。
技术实现要素:
4.为解决上述技术问题,本发明提供一种仓库灭火器远程监控系统,所述的仓库灭火器远程监控系统包括:
5.红外成像仪,阵列式设置在仓库顶面上,其用于感应仓库内的温度变化;
6.气体检测模块,阵列式设置在仓库顶面上,其用于实时监测仓库的气体情况,并生成毒气种类信号和浓度信号;
7.图片识别模块,其用于对仓库中人员、货物热像图进行识别获得货物种类、人员位置,并标定货物位置,通过货物种类查找一个预先设置种类-着火点信息表,获得货物着火点温度;
8.热像图处理模块,其用于接收热像图并进行处理,获得热源轮廓和着火点半径r;
9.空间构建模块,其用于构建空间坐标系,并将仓库轮廓模型、人员坐标、灭火器坐标和热源轮廓置于空间坐标系中;
10.预测模块,其用于接收气体检测模块的毒气种类信号和浓度信号,并判断毒气种类是否属于伤害性毒气,如果是,则判断该种类毒气浓度是否大于一个预先设置浓度标准值,如果是,则发送危险信号;如果否,则计算货物着火时间t;
11.判断模块,获得人员坐标、灭火器坐标和火源轮廓坐标,计算获得拿取时间t;判断拿取时间t是否大于货物着火时间t,如果否,则发送疏散信号,如果是,则发送路线指示信号。
12.优选的:所述仓库灭火器远程监控系统还包括指示模块,指示模块安装在仓库内部和灭火器位置,其用于对人员进行指示。
13.优选的:所述气体检测模块包括烟雾浓度传感器和可燃气体浓度传感器中的一种或者多种组合。
14.优选的:所述仓库灭火器远程监控系统包括拼接模块,拼接模块用于接收热像图,
并对热像图进行拼接,获得整体仓库热像图。
15.优选的:所述对红外成像仪进行定位获取红外成像仪坐标(xi,yi),以红外成像仪为中心,x0、y0为边长对的热像图进行分割,获得一个长为x0,宽为y0的矩形组织图片,其中x0,y0为红外成像仪安装间距,且x
i 1
=xi x0,y
i 1
=yi y0,对矩形组织图片进行拼接。
16.优选的:所述货物着火时间t计算方法包括:获得热源轮廓坐标和货物轮廓坐标,计算轮廓坐标和货物轮廓之间的距离l,预测火源蔓延速度为v,则预测模块计算货物着火时间为
17.本发明还提供一种仓库灭火器远程监控方法,应用上述所述的一种仓库灭火器远程监控系统,所述仓库灭火器远程监控方法包括如下步骤:
18.s1、红外成像仪感应仓库内的温度变化并生成热图像;
19.s2、气体检测模块实时监测仓库的气体情况,并生成毒气种类信号和浓度信号;
20.s3、对热像图中人员、货物热像图进行识别获得货物种类、人员位置,并标定货物位置,通过货物种类查找一个预先设置种类-着火点信息表,获得货物着火点温度;
21.s4、对热像图进行处理获得热源轮廓和着火点半径r;
22.s5、构建空间坐标系,并将仓库轮廓模型、人员坐标、灭火器坐标和热源轮廓置于空间坐标系中;
23.s6、判断毒气种类是否属于伤害性毒气,如果是,则执行s7;如果否,则执行s9;
24.s7、判断毒气浓度是否大于一个预先设置浓度标准值,如果是,则执行s8;如果否,则执行s9;
25.s8、发送危险信号;
26.s9、计算获得货物着火时间为t和拿取时间t;
27.s10、判断拿取时间t是否大于货物着火时间t,如果否,则执行s11,如果是,则执行s12。
28.s11、发送疏散信号。
29.s12,发送路线指示信号。
30.优选的:所述热像图处理方法的具体步骤包括:
31.s41、获取热图像原图;
32.s42、对热图像原图进行正规化投影,并进行摊平;
33.s43、将热图像摊平图进行背景分离,获得热量分布图;
34.s44、对热量分布图进行过滤,获得热源轮廓。
35.s45、对热量分布图进行着火点温度梯度线划分,获得着火点半径r。
36.优选的:所述着火点温度梯度线划分获得着火点半径的r方法包括:
37.s451、获得货物的种类燃烧温度t’和阻挡系数δ。
38.s452、计算获得着火点温度ti,所述的着火点温度ti=t' fδ,其中,f为修正因子。
39.s453、对各个着火点温度进行对比获得t
min
=min{t1…
ti…
tn}。
40.s454、对t
min
进行热量分布图进行着火点温度梯度线划分,获得着火点半径r。
41.优选的:所述拿取时间t计算方法包括:
42.s111、获取人员坐标、灭火器的坐标、火源轮廓距离货物最近坐标点;
43.s112、依次连接各个坐标获得首尾连接的线段,并计算各个线段的长度,并将首尾连接的线段长度相加获得行程s;
44.s113、计算拿取时间其中,v为一个预先设置的速度。
45.本发明的技术效果和优点:本发明通过灭火器拿取时间与货物着火时间进行对比判断灭火可能性,从而判断是灭火还是疏散,提高了灭火的可能性,同时保证了人员安全性。通过着火点温度进行判断,判断能力强且准确。
附图说明
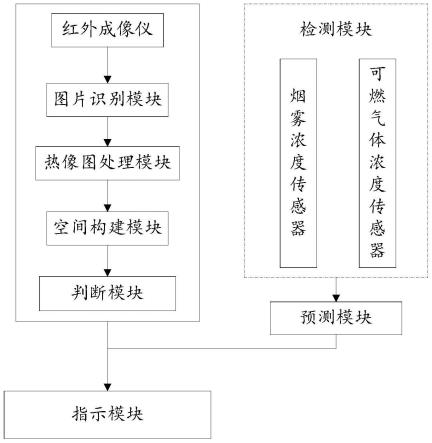
46.图1为本发明提出的一种仓库灭火器远程监控系统的结构框图。
47.图2为本发明提出的一种仓库灭火器远程监控方法的流程图。
48.图3为本发明提出的一种仓库灭火器远程监控方法中热像图处理方法的流程图。
49.图4为本发明提出的一种仓库灭火器远程监控方法中着火点温度梯度线划分获得着火点半径的r方法的流程图。
50.图5为本发明提出的一种仓库灭火器远程监控方法中拿取时间t计算方法的流程图。
具体实施方式
51.下面结合附图和具体实施方式对本发明作进一步详细的说明。本发明的实施例是为了示例和描述起见而给出的,而并不是无遗漏的或者将本发明限于所公开的形式。很多修改和变化对于本领域的普通技术人员而言是显而易见的。选择和描述实施例是为了更好说明本发明的原理和实际应用,并且使本领域的普通技术人员能够理解本发明从而设计适于特定用途的带有各种修改的各种实施例。
52.实施例1
53.参考图1,在本实施例中提出了一种仓库灭火器远程监控系统,用于对仓库及仓库存放物品进行监控,所述的仓库灭火器远程监控系统包括:
54.红外成像仪,阵列式设置在仓库顶面上,用于感应仓库内的温度变化,并生成热图像。红外成像仪可以安装在仓库的吊顶、支架等地方,红外成像仪可以均匀且阵列式的固定在仓库空间顶部,红外成像仪之间的间距可以是红外成像仪的监控边长,并将整个监控空间覆盖,从而可以进行全面监控,具体在此不做赘述。
55.气体检测模块,阵列式设置在仓库顶面上,用于实时监测仓库的气体情况,并生成毒气种类信号和浓度信号;所述的气体检测模块可以安装仓库的吊顶、支架等地方,红外成像仪和气体检测模块可以重合安装。气体检测模块可以包括烟雾浓度传感器和可燃气体浓度传感器中的一种或者多种组合,为现有技术,具体在此不做赘述。毒气种类信号和浓度信号可以是毒气泄露或者燃烧产生的毒气,具体在此不做赘述。
56.图片识别模块,用于对仓库中人员、货物热像图进行识别获得货物种类、人员位置,并标定货物位置,通过货物种类查找一个预先设置种类-着火点信息表,从而获得货物着火点温度,货物种类可以包括货物本身的品种、包装材料、覆盖材料等,货物的种类以及堆放位置,可以在货物堆放时进行货物种类和位置标定,当然并不排除图片分析获得。
57.热像图处理模块,用于接收热像图并进行处理,获得热源轮廓和着火点半径r。热像图处理方法的具体步骤包括:1、获取热图像原图;2、对热图像原图进行正规化投影,并进行摊平;3、将热图像摊平图进行背景分离,获得热量分布图;4、对热量分布图进行过滤,获得热源轮廓。5、对热量分布图进行着火点温度梯度线划分,获得着火点半径r。所述的着火点温度梯度线划分获得着火点半径的r方法可以包括获得货物的种类燃烧温度t’和阻挡系数δ,计算获得着火点温度ti,所述的着火点温度ti=t' fδ,其中,f为修正因子,对各个着火点温度进行对比获得t
min
=min{t1…
ti…
tn},对t
min
进行热量分布图进行着火点温度梯度线划分,获得着火点半径r。阻挡系数δ可以根据货物的外部包装材料的种类、厚度、隔热能力等获得,当货物堆放时进行输入,修正因子f可以试验获得。例如,货物为纸箱包装塑料管道,纸箱外部包裹有塑料薄膜,则可以获得塑料管道燃烧温度700℃,外层的纸箱和塑料薄膜的阻挡系数δ为260,修正因子f为1.1,计算获得着火温度t1=700 1.1
×
260=986。纸箱燃烧温度为230℃,塑料薄膜的阻挡系数δ为80,修正因子f为0.8,则着火温度t2=230 0.8
×
80=290。塑料薄膜的燃烧温度为400℃,t
min
=min{t1、t2、t3}=290℃,热量分布图进行着火点为290℃进行梯度线划分,并计算着火点半径。
58.空间构建模块,用于构建空间坐标系,并将仓库轮廓模型、人员坐标、灭火器坐标和热源轮廓置于空间坐标系中,坐标系将整个仓库覆盖在内。将仓库轮廓模型植入到空间坐标系的内部,获得仓库轮廓模型各个点的坐标,具体在此不做赘述。
59.预测模块,用于接收气体检测模块的毒气种类信号和浓度信号,并判断毒气种类是否属于伤害性毒气,如果是,则判断该种类毒气浓度是否大于一个预先设置浓度标准值,浓度标准值保证人员或者防毒面具安全浓度,如果是,则发送危险信号;如果否,则预测模块获得热源轮廓坐标和货物轮廓坐标,预测模块计算轮廓坐标和货物轮廓之间的距离l,预测模块预测火源蔓延速度为v,则预测模块计算货物着火时间为蔓延速度为v的计算可以根据实际情况进行预测,具体的预测方法为,判断当前火源蔓延速度的加速度v’是否为零,如果是,则为平均速度蔓延,如果否,则对火源蔓延速度二次求导获得v”进行预测,具体在此不做赘述。
60.判断模块,获得人员坐标、灭火器坐标和火源轮廓坐标,计算获得拿取时间t。拿取时间t计算方法为判断模块分析获得火源轮廓距离货物最近坐标点,判断模块计算人员坐标、灭火器坐标和火源轮廓距离货物最近坐标点之间的行程s。所述的行程s的计算方法包括:获取人员坐标、灭火器的坐标、火源轮廓距离货物最近坐标点,依次连接各个坐标获得首尾连接的线段,即人员-灭火器-火源轮廓点坐标,并计算各个线段的长度,并将首尾连接的线段长度相加获得行程s。判断模块计算拿取时间其中,v为一个预先设置的速度,还可以根据仓库管理员的身体素质进行设定,具体在此不做赘述。判断拿取时间t是否大于货物着火时间t,如果否,则发送疏散信号,如果是,则发送路线指示信号。
61.指示模块,安装在仓库内部和灭火器位置,用于对人员进行指示。通过指示模块对疏散路径、灭火器拿取路径进行指示,从而便于人员进行疏散和灭火器的拿取。所述的指示模块可以是指示牌、指示屏幕等,具体在此不做赘述。当指示模块接收路线指示信号,指示模块指示灭火器位置、火源轮廓距离货物最近坐标点最近的指示模块进行指示,从而方便
人员最快的速度拿取灭火器进行灭火,从而可以最少时间内拿取灭火器,缩减灭火时间,争取最大的灭火可能。当指示模块接收疏散信号,指示模块进行指示疏散,具体在此不做赘述。
62.实施例2
63.所述的仓库灭火器远程监控系统包括:
64.拼接模块,用于接收热像图,并对热像图进行拼接,获得整体仓库热像图。红外成像仪拍摄范围有限,不能完全覆盖整个仓库。对红外成像仪进行定位获取红外成像仪坐标(xi,yi),以红外成像仪为中心,x0、y0为边长对的热像图进行分割,获得一个长为x0,宽为y0的矩形组织图片,其中x0,y0为红外成像仪安装间距,且x
i 1
=xi x0,y
i 1
=yi y0,对矩形组织图片进行拼接,以此可以获得了整体监控热像图。
65.实施例3
66.参考图2,在本实施例中提出了一种仓库灭火器远程监控方法,包括如下步骤:
67.s1、红外成像仪感应仓库内的温度变化并生成热图像。
68.s2、气体检测模块实时监测仓库的气体情况,并生成毒气种类信号和浓度信号。
69.s3、对热像图中人员、货物热像图进行识别获得货物种类、人员位置,并标定货物位置,通过货物种类查找一个预先设置种类-着火点信息表,获得货物着火点温度。
70.s4、对热像图进行处理获得热源轮廓和着火点半径r。
71.s5、构建空间坐标系,并将仓库轮廓模型、人员坐标、灭火器坐标和热源轮廓置于空间坐标系中。
72.s6、判断毒气种类是否属于伤害性毒气,如果是,则执行s7,如果否,则执行s9。
73.s7、判断毒气浓度是否大于一个预先设置浓度标准值,如果是,则执行s8,如果否,则执行s9。
74.s8、发送危险信号。
75.s9、获取热源轮廓坐标和货物轮廓坐标,预测模块计算轮廓坐标和货物轮廓之间的距离l、火源蔓延速度为v,计算货物着火时间为
76.s10、获得人员坐标、灭火器坐标和火源轮廓坐标,计算获得拿取时间t。
77.s11、判断拿取时间t是否大于货物着火时间t,如果否,则执行s12,如果是,则执行s13。
78.s12、发送疏散信号。
79.s13,发送路线指示信号。
80.参考图3,热像图处理方法的具体步骤包括:
81.s41、获取热图像原图;
82.s42、对热图像原图进行正规化投影,并进行摊平;
83.s43、将热图像摊平图进行背景分离,获得热量分布图;
84.s44、对热量分布图进行过滤,获得热源轮廓。
85.s45、对热量分布图进行着火点温度梯度线划分,获得着火点半径r。
86.参考图4,所述的着火点温度梯度线划分获得着火点半径的r方法可以包括:
87.s451、获得货物的种类燃烧温度t’和阻挡系数δ。
88.s452、计算获得着火点温度ti,所述的着火点温度ti=t' fδ,其中,f为修正因子。
89.s453、对各个着火点温度进行对比获得t
min
=min{t1…
ti…
tn}。
90.s454、对t
min
进行热量分布图进行着火点温度梯度线划分,获得着火点半径r。
91.参考图5,拿取时间t计算方法包括:
92.s111、获取人员坐标、灭火器的坐标、火源轮廓距离货物最近坐标点。
93.s112、依次连接各个坐标获得首尾连接的线段,并计算各个线段的长度,并将首尾连接的线段长度相加获得行程s。
94.s113、计算拿取时间其中,v为一个预先设置的速度。
95.显然,所描述的实施例仅仅是本发明的一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域及相关领域的普通技术人员在没有作出创造性劳动的前提下所获得的所有其他实施例,都应属于本发明保护的范围。本发明中未具体描述和解释说明的结构、装置以及操作方法,如无特别说明和限定,均按照本领域的常规手段进行实施。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。