1.本发明涉及机器人清洁领域,具体地,涉及室内清洁机器人避障方法和系统。
背景技术:
2.清洁机器人系统主要包含移动底盘模块,手臂模块,视觉模块,电动清洁工具模块。完成清洁任务流程如下:移动底盘模块将清洁机器人移动到待清洁区域前方合适位置,视觉模块识别清洁区域的形状和位置,将清洁区域的信息传送给手臂模块,手臂控制模块控制手臂和电动清洁工具模块到达清洁区域表面,电动工具模块启动,清洁待清洁区域。实际使用过程中发现,清洁工具在清洁过程中,存在障碍物挡住无法完成清洁任务,严重时可能损坏电动工具,因此有必要提供一种新的清洁机器人避障方法,以提高机器人路径规划的可靠性。
3.专利文献cn108209773a(申请号:201810008625.0)公开了一种清洁机器人及清洁机器人的智能避障方法,所述方法包括:障碍物传感器系统发射障碍物检测信号和接收障碍物检测信号,控制器采集信号强度值,并将信号强度值转化为信号强度值的相对变化率,再根据信号强度值的相对变化率与第一阈值的比较结果控制清洁机器人的行为。
技术实现要素:
4.针对现有技术中的缺陷,本发明的目的是提供一种室内清洁机器人避障方法和系统。
5.根据本发明提供的一种室内清洁机器人避障方法,包括:
6.步骤s1:手臂末端夹爪抓住电动工具,手臂末端按照预设的清洁轨迹进行清洁运动,并带动电动工具清洁物体表面;
7.步骤s2:信号采集和处理模块采集电动工具的电流,并进行滤波处理,得到电流实际大小;
8.步骤s3:手臂控制模块根据实际电流大小产生清洁表面z轴方向的速度补偿,并将原清洁轨迹与补偿轨迹叠加,使清洁工具远离清洁表面,当达到预设距离时,电流依然大于阈值时,则认为电动工具末端存在障碍物,控制电动工具停止转动。
9.优选地,所述步骤s1采用:根据视觉反馈清洁位置规划清洁轨迹。
10.优选地,所述步骤s2采用:电动工具电流通过adc采样模块采集,通过滤波模块处理电流信号,得到电流的实际大小。
11.优选地,所述步骤s3采用:当实际电流值i大于预设值时,且连续达到预设个控制周期,则手臂控制模块产生路径表面z负轴方向的速度v作为速度补偿。
12.优选地,所述速度v采用:
[0013][0014]
其中,ramp为速度增长斜率;ramp_time为速度饱和时间;vmax为饱和速度。
[0015]
根据本发明提供的一种室内清洁机器人避障系统,包括:
[0016]
模块m1:手臂末端夹爪抓住电动工具,手臂末端按照预设的清洁轨迹进行清洁运动,并带动电动工具清洁物体表面;
[0017]
信号采集和处理模块:采集电动工具的电流,并进行滤波处理,得到电流实际大小;
[0018]
手臂控制模块:根据实际电流大小产生清洁表面z轴方向的速度补偿,并将原清洁轨迹与补偿轨迹叠加,使清洁工具远离清洁表面,当达到预设距离时,电流依然大于阈值时,则认为电动工具末端存在障碍物,控制电动工具停止转动。
[0019]
优选地,在所述模块m1中:根据视觉反馈清洁位置规划清洁轨迹。
[0020]
优选地,在所述信号采集和处理模块中:电动工具电流通过adc采样模块采集,通过滤波模块处理电流信号,得到电流的实际大小。
[0021]
优选地,在所述手臂控制模块中:当实际电流值i大于预设值时,且连续达到预设个控制周期,则手臂控制模块产生路径表面z负轴方向的速度v作为速度补偿。
[0022]
优选地,所述速度v采用:
[0023][0024]
其中,ramp为速度增长斜率;ramp_time为速度饱和时间;vmax为饱和速度。
[0025]
与现有技术相比,本发明具有如下的有益效果:
[0026]
1、本发明基于电动工具电流大小检测障碍物,避免电动工具与障碍接触力过大造成损坏;
[0027]
2、本发明基于电动工具的电流信号,省去额外传感器的成本。
附图说明
[0028]
通过阅读参照以下附图对非限制性实施例所作的详细描述,本发明的其它特征、目的和优点将会变得更明显:
[0029]
图1为室内清洁机器人避障系统示意图。
[0030]
图2为室内清洁机器人避障方法流程图。
[0031]
图3为速度曲线示意图。
[0032]
图4为清洁路径示意图。
具体实施方式
[0033]
下面结合具体实施例对本发明进行详细说明。以下实施例将有助于本领域的技术人员进一步理解本发明,但不以任何形式限制本发明。应当指出的是,对本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变化和改进。这些都属于本发明的保护范围。
[0034]
实施例1
[0035]
本发明提供一种室内清洁机器人避障方法和系统,当清洁物体表面时,根据电动工具电流大小,判断清洁过程是否遇到障碍物,优化机器人轨迹,提高机器人路径规划的可靠性。
[0036]
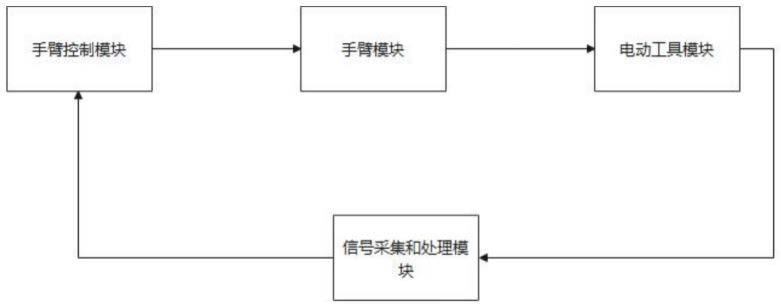
本发明提供了一种清洁机器人避障系统,如图1所示,包括:电动工具模块,信号采集和处理模块,手臂控制模块,手臂模块。手臂末端夹爪抓住电动工具,手臂按照预先设计的清洁轨迹清洁运动,带动电动工具清洁物体表面,信号采集和处理模块采集电动工具的电流,进行滤波处理,得到电流实际大小,手臂控制模块根据实际电流大小,产生清洁表面z方向的速度补偿,原清洁轨迹与补偿轨迹叠加,使清洁工具远离清洁表面,当达到一定距离时,电流依然大于阈值,则认为电动工具末端存在障碍物,控制电动工具停止转动,以免损坏电动工具。各个模块连接关系如图。
[0037]
本发明提供了一种清洁机器人避障方法,如图2、图4所示,包括:
[0038]
1)手臂根据视觉反馈清洁位置,规划预先设计的清洁轨迹。
[0039]
2)电动工具启动,电动工具电流通过adc采样模块采集,通过滤波模块处理电流信号,得到可用的实际电流值i。
[0040]
3)手臂控制模块根据实际电流值设计避障规则:当实际电流值i大于imax,且连续达到10个控制周期,产生路径表面z负方向的速度v,为防止振动,速度v以斜坡增长,到达-vmax时饱和,vmax和斜坡时间可以配置。曲线如图3所示。
[0041]
4)机器人运行过程,将补偿轨迹与原始轨迹的位置叠加,产生新的控制位置,下发到机器人控制器。
[0042]
5)当补偿轨迹的路径长度达到2cm,实际电流值仍然大于imax,则认为电动工具末端撞到障碍物,停止电动工具转动。
[0043]
本领域技术人员知道,除了以纯计算机可读程序代码方式实现本发明提供的系统、装置及其各个模块以外,完全可以通过将方法步骤进行逻辑编程来使得本发明提供的系统、装置及其各个模块以逻辑门、开关、专用集成电路、可编程逻辑控制器以及嵌入式微控制器等的形式来实现相同程序。所以,本发明提供的系统、装置及其各个模块可以被认为是一种硬件部件,而对其内包括的用于实现各种程序的模块也可以视为硬件部件内的结构;也可以将用于实现各种功能的模块视为既可以是实现方法的软件程序又可以是硬件部件内的结构。
[0044]
以上对本发明的具体实施例进行了描述。需要理解的是,本发明并不局限于上述特定实施方式,本领域技术人员可以在权利要求的范围内做出各种变化或修改,这并不影响本发明的实质内容。在不冲突的情况下,本技术的实施例和实施例中的特征可以任意相互组合。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。