激光测量装置
【技术领域】
1.本发明属于测量仪器领域,特别涉及一种激光测量装置。
背景技术:
2.利用点或线激光进行测量的方式已在工业领域存在多种应用,此种结构均包括点或线激光发射器及工业相机,其中工业相机包括透镜及相应的图像采集元件,在工作时,点或线激光发射器发射激光至外部物体,该激光经外部物体反射后通过透镜照射在图像采集元件上,该图像采集元件根据采集的图像而计算得到物体的距离或运动参数等。具体的现有技术可参考申请人2020年3月16日申请的202020321413.0专利。然而现有的激光测量装置在不移动的使用场景下仅适用于二维方向(如x与z向)的测量,对于需要移动测量的场景(如测量物体平面度等),则业界通常有二种解决办法。一种是测量装置固定不变,被测物体通过一直线运动装置(如滑轨或传送带)带动运动,如此测量装置分段采集图像而形成被测物体的整体图像。另一种方式是被测物体不动,而测量装置通过一直线运动装置带动运动。上述二种方式的不足之处在于需要在测试现场(如生产线)设置带动被测物体或测量装置的直线运动装置,如此增加测试现场相关配套装置的复杂度,特别是对于光学测试装置,更是要保证相当高的精密度,如直线运动的速度及平整度(保证被测物体在高度方向没有变动以便光学对焦),如此需要配备技术人员进行调试与维护,因此会增加测量装置使用厂商的生产与维护成本。
技术实现要素:
3.本发明的目的在于提供一种激光测量装置,用以解决现有技术中需要移动测量时增加测量装置使用厂商的生产与维护成本的问题。
4.为实现上述目的,实施本发明的一种激光测量装置,包括一壳体、激光测量模组及直线运动模组,其中所述激光测量模组及直线运动模组均设置于所述壳体内,所述直线运动模组带动所述激光测量模组在所述激光测量装置的纵长轴线方向运动。
5.依据上述主要特征,所述激光测量模组包括一安装支架、传感器电路板、激光发射器及光学透镜,其中传感器电路板上设有与激光发射器与光学透镜相配合的图像采集元件。
6.依据上述主要特征,该激光测量装置还包括一主电路板及一柔性连接元件,该主电路板固定在壳体上通过所述柔性连接元件与传感器电路板连接。
7.依据上述主要特征,所述直线运动模组包括一电机、丝杠、滑轨及滑块,所述滑块在滑轨上直线运动,所述激光测量装置还设有一相机安装支架,所述激光测量模组通过此相机安装支架安装在滑块上。
8.依据上述主要特征,所述激光测量装置还包括一距离测量模组。
9.依据上述主要特征,所述距离测量模组为红外线或激光测距模组。
10.依据上述主要特征,所述距离测量模组包括一光栅尺与光栅读码头,所述光栅读
码头与所述激光测量模组同步运动,而光栅尺固定在光栅读码头下侧的激光测量装置的壳体上。
11.依据上述主要特征,所述距离测量模组还包括二限位开关,分别设于光栅尺的长度方向末端。
12.依据上述主要特征,所述距离测量模组包括一磁栅尺与磁栅读码头,所述磁栅读码头与所述激光测量模组同步运动,而磁栅尺固定在磁栅读码头下侧。
13.依据上述主要特征,所述直线运动模组为直线磁悬浮移动装置。
14.与现有技术相比较,本发明通过设置一直线运动模组,如此可通过此直线运动模组带动激光测量模组在所述激光测量装置的纵长轴线方向运动,如此满足移动测量场景的要求,并且测量现场不必设置驱动被测物体或所述激光测量装置直线运动的装置,从而有效降低了测量装置使用厂商的生产与维护成本。
【附图说明】
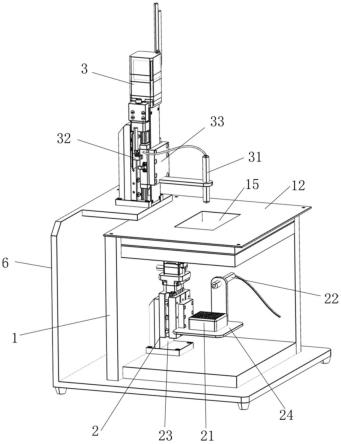
15.图1为实施本发明的激光测量装置的立体分解示意图。
16.图2为实施本发明的激光测量装置的局部的立体组装示意图。
17.图3为图2的顶视图。
【具体实施方式】
18.请参阅图1所示,为实施本发明的激光测量装置的立体分解示意图。实施本发明的激光测量装置包括一壳体10、激光测量模组11、相机安装支架12、直线运动模组13、距离测量模组14及主电路板15,以下对上述各部分进行详细说明。
19.所述壳体10呈矩形状,形成一内部收容空间,至少包括两相对的第一侧板100与第二侧板102,其中第一侧板100中部沿所述壳体10的纵长轴线设有一开口101,并且所述壳体10还包括设于开口101外部的密封圈103、滤光片104及滤光片盖板105,所述滤光片盖板105通过螺丝(未图示)固定在所述第一侧板100上并将所述密封圈103与滤光片104固定。而第二侧板102设有多个开孔(未标号),以便主电路板15的数据接口150穿过(容后详述)。再者,所述壳体10还包括一盖板106。
20.激光测量模组11包括一安装支架110、传感器电路板111、激光发射器112及光学透镜113,其中传感器电路板111上设有与激光发射器112与光学透镜113相配合的图像采集元件114,而安装支架110设有收容激光发射器112及光学透镜113的第一通孔115及第二通孔116,所述传感器电路板111安装在安装支架110上,所述的激光发射器112为线激光发射器,所述激光测量模组11的工作原理现有技术中多有描述,此处不再详细说明。
21.相机安装支架12包括第一安装板121、第二安装板122及连接第一安装板121与第二安装板122的连接板120,其中激光测量模组11的安装支架110通过螺丝(未图示)安装在第二安装板122上,而第一安装板121则与直线运动模组13相连接(容后详述)。
22.所述直线运动模组13包括一电机130、丝杠133、滑轨131及滑块132,所述滑块132通过电机130驱动丝杠133在滑轨131上直线运动,所述激光测量模组11通过相机安装支架12的第一安装板121安装在滑块132上。
23.所述激光测量装置还包括一距离测量模组14,所述距离测量模组14包括一光栅尺
140与光栅读码头141,所述光栅读码头141安装在所述相机安装支架12上用与所述激光测量模组11同步运动,而光栅尺140固定在光栅读码头141下侧的壳体10的第一侧板100上,并与开口101平行设置。另外,所述距离测量模组14还包括二限位开关142,分别设于光栅尺140长度方向末端。所述光栅读码头141与传感器电路板111连接,在本实施例中光栅读码头141与光栅尺140配合取得激光测量模组11的移动距离,每经过预设的距离则控制激光测量模组11采样一幅被测物体的图像。当然,上述距离测量模组也可采用其他的光学测距模组,如在激光测量模组11设置一红外光或激光收发元件,并在直线运动模组13的滑轨131一端设置一反射元件,利于红外光或激光发射光与反射光的时间差测得距离。或者上述距离测量模组也可通过统计直线运动模组13的电机130的驱动脉冲而计算出激光测量模组11在滑轨131上的移动距离,不过此种方式存在统计步进电机130的驱动脉冲错误(如个别驱动脉冲丢失)的问题,并且在电机130启动到达到预定速度前,每一驱动脉冲所对应的直线运动距离不同,如此会导致激光测量模组11采集的被测物体的图像分布不均匀而无法精确反映被测物体的形状。或者,上述上述距离测量模组也可为磁栅尺与磁栅读码头,其安装方式与上述光栅尺140与光栅读码头141相同,磁栅尺与磁栅读码头利用磁感应原理实现距离测量。
24.所述主电路板15固定在壳体10上,并且至少包括数据接口150及一柔性连接元件151,该主电路板15通过所述柔性连接元件151与传感器电路板111连接,而所述数据接口150则用以将该激光测量装置的测量的数据输出至外部工控机(如控制电脑),所述柔性连接元件151可为柔性电路板、柔性排线或线缆。
25.在具体实施时,所述激光测量装置的激光测量模组11在直线运动模组13的带动下,可沿所述激光测量装置的纵长轴线运动,从而实现对较长物体的测量。同时,所述激光测量装置可根据距离测量模组14的输出值,在移动预设的距离便采集一幅被测物体的图像。诚然,对在对物体形状要求不高的实施场景,可控制激光测量模组11在经过一预定时间采集一幅被测物体的图像,从不需设置上述的距离测量模组。
26.另外,所述直线运动模组可为直线磁悬浮移动装置,通过在激光测量模组11与壳体10上设置相应的装置,利用磁力实现悬浮移动,如此减少摩擦力,对于直线磁悬浮移动装置可参现有技术中的描述,此处不再详细说明。
27.与现有技术相比较,本发明通过设置一直线运动模组,如此可通过此直线运动模组带动激光测量模组在所述激光测量装置的纵长轴线方向运动,如此满足移动测量场景的要求,并且测量现场不必设置驱动被测物体或所述激光测量装置直线运动的装置,将驱动激光测量模组直线运动的结构及相应的误差控制均在所述激光测量装置内解决,从而有效降低了测量装置使用厂商生产与维护成本。
28.可以理解的是,对本领域普通技术人员来说,可以根据本发明的技术方案及其发明构思加以等同替换或改变,而所有这些改变或替换都应属于本发明所附的权利要求的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。