1.本发明属于生物认证和信息安全技术领域,特别是隐式身份认证领域,具体涉及一种基于步态特征的隐式身份认证方法。
背景技术:
2.随着智能手机的发展和普及,它已经成为人们工作、生活和娱乐不可或缺的一部分。智能手机存储着用户大量的隐私数据,包括通讯录、照片、聊天记录和银行账户密码等私人信息,一旦泄露会对用户的人身和财产安全造成威胁,由此身份认证技术被提出。
3.显式身份认证是身份认证技术的重要分支,包括基于口令和基于生理特征的身份认证方法。基于口令的认证方法是指用户按照个人习惯设置由数字、字母和符号组成的口令用于手机解锁,简单的口令容易被猜测,复杂的口令不符合用户的逻辑习惯,且口令存在易重用和易泄露的风险;基于生理特征的认证方法是通过识别用户的生理特征如指纹、人脸、声纹、掌纹和虹膜等完成认证,其中指纹识别和人脸识别技术已得到广泛应用,认证准确率较高。然而,显式身份认证方法的实施需要用户配合完成指定操作,且只在解锁手机时实现一次认证,无法解决手机解锁之后的隐私数据泄露问题。
4.隐式身份认证能为用户解锁之后提供无干扰、持续性的身份认证,其是基于用户行为特征实现的,主要包括用户携带手机运动时产生的步态特征和用户操作手机时产生的击键特征和触屏特征。其中,击键数据和触屏数据仅在用户与移动终端接触时产生,且依赖于智能手机触摸屏的性能,一些手机型号无法捕获接触屏幕时的压力和接触面积。其中,人的步态是由人体骨骼、神经和肌肉系统之间的协调形成的,其特征难以隐藏和模仿,且步态数据易于采集,无需与移动终端接触就可获得。
5.申请号201910566310.2的中国发明专利申请了一种基于步态信息的身份认证方法。该方法使用加速度计数据,将按照步态周期分割生成的数据集输入神经网络模型,采用极值统计的方法比较当前用户与已授权用户的用户空间距离,从而识别非法用户。其局限在于仅使用单一的加速度计数据提取步态信息,且仅考虑用户步行时的身份认证。申请号202110203762.1的中国发明专利申请了一种可视化步态周期序列为二维图形的身份认证方法,其局限在于该方法使用的基于峰值的步态周期分割算法易受序列信号中局部最值的干扰,无法保证步态周期的准确提取进而影响身份认证性能,且将步态周期序列转化为二维图形会丢失时间相关性的特征影响认证准确率。申请号202110310021.3的中国发明专利申请了一种非受控步行场景下的持续身份认证方法,其局限在于指出不同行走场景和手机的携带方式会影响认证准确率,但没有针对具体的场景特点优化认证方法,方法的实际可用性有待提高。申请号202110361509.9的中国发明专利申请了一种基于用户坐标系与门控循环单元的步态认证方法,其局限在于将加速度计幅度轴两个局部最大值作为步态周期,该步态分割方法存在较大随机性,直接影响身份认证性能,且使用结构简化的门控循环单元在特征提取上有所限制。
6.现有技术存在诸多不足,一是仅使用单一的加速度计,有限的数据输入无法充分
提取反映用户身份的特征;二是仅依赖局部最值提取步态周期存在较大随机性,样本分割的不准确直接影响认证性能;三是大部分方法仅考虑用户处于步行场景下的身份认证,且没有考虑手机携带方式的不同对认证性能的影响,无法保证在复杂的实际应用场景中的可用性;四是基于循环神经网络构建的模型在特征提取上性能有待提高。针对以上问题,本发明旨在提出一种应对实际使用场景变化、考虑不同携带方式的隐式身份认证方法,从输入数据构建、数据处理和分类模型设计上进一步提升身份认证的准确率,增强认证方法的可用性和鲁棒性。
技术实现要素:
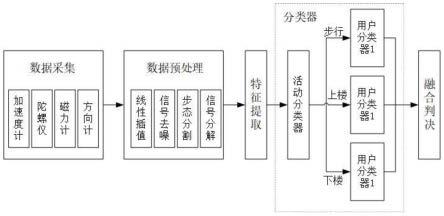
7.本发明的目的是在用户无操作的认证场景下,针对实际使用场景复杂多变、携带方式存在差异的情况,现有的认证方法准确率不高和实际可用性不强等问题,提供一种基于步态特征的隐式身份认证方法,融合多个传感器数据和多类型信号作为输入,构建先活动场景分类后用户分类的两阶段身份认证框架,进一步提高用户认证准确率。
8.本发明方法具体是:
9.步骤(1)采集n个用户的运动传感器数据,构建用于训练模型的带标签步态序列集s;具体如下:
10.考虑手机内置的加速度计、陀螺仪、磁力计和方向计作为输入数据源,第i个用户的步态序列si=[acci,gyri,magi,orii]
t
,i=1,2,
…
,n,acci为加速计信号、gyri为陀螺仪信号、magi为磁力计信号、orii为方向计信号,t表示转置操作;由此构建由n个用户组成的步态序列集s={s1,s2,
…
,sn};其中:
[0011]
第i个用户的加速度计信号其中是维度为1
×
li的矢量,acci是维度为li×
3的矩阵,li由用户的采集时长di和采样频率fs确定,li=di×fs
,x、y、z分别表示传感器的x轴信号、y轴信号和z轴信号;
[0012]
第i个用户的陀螺仪信号其中gyr
ix
、gyr
iy
、gyr
iz
是维度为1
×
li的矢量,gyri是维度为li×
3的矩阵;
[0013]
第i个用户的磁力计信号其中是维度为1
×
li的矢量,magi是维度为li×
3的矩阵;
[0014]
第i个用户的方向计信号其中是维度为1
×
li的矢量,orii是维度为li×
3的矩阵。
[0015]
由此,si是维度为12
×
li的矩阵。
[0016]
考虑常见的步行、上楼和下楼的实际使用场景,为第i个用户的步态序列si打上用户身份标签tag
i,user
和活动场景标签tag
i,scene
,第i个用户的步态序列标签ti=(tag
i,user
,tag
i,scene
),由此形成包含n个步态序列的步态序列集对应的标签集
[0017]
步骤(2)步态序列si视为由12个长度为li的子序列s
i,h
构成,
其中s
i,h
表示第i个用户步态序列si中的第h个子序列,是维度为1
×
li的矢量,h=1,2,
…
,12;子序列表示为,12;子序列表示为表示子序列s
i,h
的第v个采样点数值,v=1,2,
…
,li。
[0018]
对每个子序列s
i,h
进行数据预处理,依次执行线性插值、去除噪声、步态周期分割和信号分解操作,具体如下:
[0019]
(2-1)线性插值:为解决运动传感器数据实际采样不均匀的问题引入线性插值操作。判断子序列s
i,h
中第v个采样点的采样时间tv,与第v-1个采样点的采样时间t
v-1
的时间间隔δt=t
v-t
v-1
是否满足如果则表示采样不均匀,当前采样点需要进行线性插值,否则不需要进行线性插值。选择当前采样点相邻的第v-1个和第v 1个采样点,对应的采样时间分别为t
v-1
、t
v 1
,对应的数值分别为根据线性插值公式计算当前采样点对应的新值其中表示插值后当前采样点对应的采样时间,线性插值后的步态子序列表示为是维度为1
×
li的矢量,线性插值后的步态序列表示为是维度为12
×
li的矩阵。
[0020]
(2-2)去除噪声:采用具有线性相位特性的有限冲击响应数字滤波器(finite impulse response digital filter,fir)完成对步态序列的平滑去噪,设置滤波器的截止频率fc,窗长m,窗形状控制参数β,得到平滑去噪后的步态序列其步态子序列
[0021]
(2-3)步态周期分割:确定步态周期分割点集合由此分割步态序列
[0022]
所述的确定步态周期分割点集合是通过基于模板的步态周期分割算法完成,包括确定待选的步态模板集合、选择最优模板、确定步态周期分割点集合;
[0023]
确定待选的步态模板集合计算步态子序列中第j个采样点的最大显著性向量长度最大显著性向量是指从当前采样点开始连续递增的序列。判断最大显著性向量长度是否满足大于等于阈值l
thresh
,且与第j 1个采样点的最大显著性向量长度的差值也大于等于阈值l
thresh
,即判断条件为且满足判断条件的采样点j作为步态模板的起始点,记为步态子序列的第k个步态模板起始点则步态子序列的第k个步态模板其中表示子序列第k 1个步态模板的起始点。由此构建待选的步态模板集合第k 1个步态模板的起始点。由此构建待选的步态模板集合ki表示第i个用户的步态子序列得到的待选
步态模板总数;
[0024]
选择最优模板tempi:计算步态子序列的平均标准差其中std(
·
)为计算平均标准差的函数,计算集合中ki个待选模板temp
i,k
的平均标准差的平均标准差第k个待选模板的平均标准差和步态子序列的平均标准差两者差值的平方可以表示为选择最小的b
i,k
表示为其对应待选步态模板即为最优模板tempi;
[0025]
确定步态周期分割点集合以步态子序列的每个采样点j为起点截取与模板tempi相同长度的信号片段计算与模板的互相关其中
·
表示矢量的点乘操作,sum(
·
)表示求和操作,由此构建互相关信号r
i,h
是维度为1
×
li的矢量。互相关信号幅值的大小表示原始信号片段与模板的相似程度,找到互相关信号r
i,h
的波峰出现在第j
peak
个采样点,则获得步态周期分割点集合的第o个步态周期分割点u
i,o
=j
peak
,对应的集合表示为oi表示确定的步态周期分割点总数;
[0026]
所述的分割步态序列将步态子序列确定的步态周期分割点集合用于分割步态序列集合中oi个步态周期分割点将步态序列分割为oi 1个步态数据样本,为步态序列分割得到的第n个步态数据样本,是维度为12
×
(u
i,n-u
i,n-1
)的矩阵。分割对应的步态数据样本标签其中是第n个步态数据样本对应的标签,存在关系对应的标签,存在关系是维度为1
×
(u
i,n-u
i,n-1
)的矢量。每个步态序列分割得到oi 1个步态数据样本,由此构建步态数据集计算步态数据集的样本总数
[0027]
(2-4)将每个步态数据样本分解为低频的粗近似信号和高频的细近似信号号
[0028]
获取低频的粗近似信号使用凯泽窗族fir低通滤波器获得低频信号,设置滤波器的低频截止频率f
lp
,窗长m
lp
,窗形状控制参数β
lp
;
[0029]
获取高频的细近似信号使用凯泽窗族fir高通滤波器获得高频信号,设置滤波器的高频截止频率f
hp
,窗长m
hp
,窗形状控制参数β
hp
;
[0030]
组合原始步态数据样本低频信号和高频信号获得新的步态数据样
本本是维度为36
×
li的矩阵,步态数据样本对应的标签与原始步态数据样本相同,其标签为新生成的步态数据集包含的样本数与原步态数据集相同,即新步态数据集对应的标签集
[0031]
步骤(3)设计活动场景分类模型:
[0032]
模型基于卷积神经网络(convolution neural network,cnn)、长短时记忆网络(long short time memory,lstm)和全连接层(fully connected layer,fc)串行构建,其中包含个卷积层、个长短时记忆层和个全连接层,每个卷积层后都连接批归一化层和非线性激活层。
[0033]
步骤(4)训练活动场景分类模型:
[0034]
(4-1)参数初始化:随机初始化学习网络的权值参数w
scene
和偏置参数b
scene
,初始化迭代轮次e
scene
=0,设置初始学习率η
scene
,训练样本批大小bs
scene
,最大迭代轮次e
scene
;
[0035]
(4-2)数据分批:按照设置的样本批大小bs
scene
将数据集均匀分成p
scene
个批次,每个批次的步态数据子集表示为其对应的标签集为
[0036]
(4-3)数据输入:随机选取某一批次的步态数据子集送入步骤(3)构建的分类模型中,通过卷积层和长短时记忆层提取步态数据的特征表示,输入全连接层得到该批次数据的预测标签集
[0037]
(4-4)参数更新:根据该批次数据的真实标签和预测标签集计算损失函数值loss
scene
,并根据损失函数值loss
scene
更新模型参数;
[0038]
(4-5)单轮训练:当第e
scene
轮次的p
scene
个批次数据都输入分类模型,则表示该轮训练结束,进入步骤(4-6),否则返回步骤(4-3);
[0039]
(4-6)训练结束判断:当损失函数loss
scene
在连续es′
cene
轮内的减小幅度均小于σ
scene
,其中es′
cene
为判断分类模型是否收敛的最小收敛轮数,σ
scene
为判断loss
scene
基本不再减小的阈值,表明分类模型已收敛,执行步骤(4-8);否则执行步骤(4-7);
[0040]
(4-7)若e
scene
<e
scene
,则e
scene
=e
scene
1,继续迭代,返回步骤(4-2);若e
scene
=e
scene
,
[0041]
表明分类器训练结束,进入步骤(4-8);
[0042]
(4-8)模型保存:保存分类器模型的最佳权重参数和最佳偏置参数
[0043]
步骤(5)构建各个活动场景下用户分类模型:
[0044]
该模型基于卷积神经网络(convolution neural network,cnn)、长短时记忆网络(long short time memory,lstm)和全连接层(fully connected layer,fc)串行构建,其中包含个卷积层、个长短时记忆层和个全连接层,每个卷积层后都连接批归一化层和非线性激活层。
[0045]
步骤(6)训练各个活动场景下的用户分类模型:
[0046]
(6-1)构建数据子集:按照活动场景标签将步态数据集分割为步行数据子集上楼数据子集下楼数据子集作为对应活动场景的训练集,其样本总数分别为a
walk
、a
up
、a
down
,满足a
walk
a
up
a
down
=q,q为步态数据集的样本总数。
[0047]
(6-2)参数初始化:随机初始化学习网络的权值参数w
user
和偏置参数b
user
,初始化迭代轮次e
user
=0,设置初始学习率η
user
,训练样本批大小bs
user
,最大迭代轮次e
user
;
[0048]
(6-3)数据分批:按照设置的样本批大小bs
user
将对应活动场景的数据子集均匀分成p
user
个批次,每个批次的步态数据子集表示为其对应的标签集为
[0049]
(6-4)数据输入:随机选取某一批次的步态数据子集送入步骤(3)构建的分类模型中,通过卷积层和长短时记忆层提取步态数据的特征表示,输入全连接层得到该批次数据的预测标签集
[0050]
(6-5)参数更新:根据该批次数据的真实标签和预测标签集计算损失函数值loss
user
,并根据损失函数值loss
user
更新模型参数;
[0051]
(6-6)单轮训练:当第e
user
轮次的p
user
个批次数据都输入分类模型,则表示该轮训练结束,进入步骤(6-7),否则返回步骤(6-4);
[0052]
(6-7)训练结束判断:当损失函数loss
user
在连续eu′
ser
轮内的减小幅度均小于σ
user
,其中eu′
ser
为判断分类模型是否收敛的最小收敛轮数,σ
user
为判断loss
user
基本不再减小的阈值,表明分类模型已收敛,执行步骤(6-9);否则执行步骤(6-8);
[0053]
(6-8)若e
user
<e
user
,则e
user
=e
user
1,继续迭代,返回步骤(6-3);若e
user
=e
user
,表明分类器训练结束,进入步骤(6-9);
[0054]
(6-9)模型保存:保存分类器模型的最佳权重参数和最佳偏置参数
[0055]
步骤(7)认证用户身份:
[0056]
获取手机内置的加速度计信号acc、陀螺仪信号gyr、磁力计信号mag和方向计信号ori,信号长度为l,融合形成当前用户的步态序列s=[acc,gyr,mag,ori]
t
,其中acc、gyr、mag、ori都是维度为l
×
3的矩阵,s是维度为12
×
l的矩阵,为步态序列s打上用户身份标签tag
user
和活动场景标签tag
scene
,则步态序列s对应的标签为t=(tag
user
,tag
scene
)。
[0057]
对步态序列s进行线性插值、平滑去噪、步态周期分割操作,获得按步态周期分割的步态样本其中c为分割得到的步态样本数,分割后步态样本c=1,2,
…
,c的标签与原步态序列s的标签相同,则的标签为t=(tag
user
,tag
scene
),执行过程同步骤(2-1)~(2-3);
[0058]
将分割后的步态样本分解为低频的粗近似信号和高频的细近似信号其中c=1,2,
…
,c,组合原始信号低频信号和高频信号得到用于认证用户身份
的步态样本组合后的步态样本的标签与原步态样本的标签相同,则的标签t=(tag
user
,tag
scene
),执行过程同步骤(2-4);
[0059]
将步态样本输入到训练好的活动场景分类模型,输出活动场景的预测标签tags′
cene
,根据该活动场景标签将样本输入对应的用户分类模型,判断用户的预测标签tag
′
user
与当前用户的标签tag
user
。若相同则当前用户属于合法用户,则完成身份认证,否则锁定设备,拒绝访问。
[0060]
与现有技术相比,本发明具有以下有益效果:
[0061]
1.本发明融合了多个传感器数据,数据来源丰富。大部分相关研究只考虑加速度计,本发明使用加速度计、陀螺仪、磁力计和方向计数据作为输入数据源,从中提取表征用户身份的深度特征,提高认证方法的认证准确率。
[0062]
2.本发明融合了不同频率分量的步态数据,进一步提升认证性能。低频的粗近似信号能够在保留原始信号重要特征的前提下,更好地分析信号的整体变化趋势。而高频的细近似信号能够在维持信号整体变化趋势的前提下,突出信号的局部特征。
[0063]
3.本发明考虑用户活动场景变化对身份识别的影响,构建活动场景分类-用户分类的二级认证框架,在识别当前活动场景后再调用对应的用户分类器,增强身份认证框架的实际可用性。
附图说明
[0064]
为了更清楚地说明本发明实施例的技术方案,下面对描述实施例中需要用到的附图做简单介绍。显然,所介绍的附图只是本发明所要描述的一部分实例的附图。
[0065]
图1是本发明认证方法整体框架的示意图;
[0066]
图2是本发明按步态周期分割步态序列的流程图;
[0067]
图3是本发明活动场景分类模型的示意图;
[0068]
图4是本发明方法中分类模型训练过程的流程图;
[0069]
图5是本发明用户分类模型的示意图。
具体实施方式
[0070]
以下结合附图并举实施例对本发明作进一步详细说明。
[0071]
本实施例以获取的35名用户在步行、上楼和下楼场景下的步态数据为例,对本发明提出的基于步态特征的隐式身份认证方法进行说明,其整体框架如图1所示。
[0072]
步骤(1)采集n个用户的运动传感器数据,构建用于训练模型的带标签步态序列集s,具体如下:
[0073]
考虑手机内置的加速度计、陀螺仪、磁力计和方向计作为输入数据源,第i个用户的加速度计信号表示为n(本实施例中n=35)表示用户数量,其中是维度为1
×
li的矢量,acci是维度为li×
3的矩阵,li由用户的采集时长di(采样时长为用户携带手机的时间,不确定)和采样频率fs(本实
施例中fs=50hz)确定,li=di×fs
,其中t表示转置操作,x、y、z分别表示传感器的x轴信号、y轴信号和z轴信号。同样的,第i个用户的陀螺仪信号表示为gyri=[(gyr
ix
)
t
,(gyr
iy
)
t
,(gyr
iz
)
t
],其中gyr
ix
、gyr
iy
、gyr
iz
是维度为1
×
li的矢量,gyri是维度为li×
3的矩阵;第i个用户的磁力计信号表示为其中是维度为1
×
li的矢量,magi是维度为li×
3的矩阵;第i个用户的方向计信号表示为其中是维度为1
×
li的矢量,orii是维度为li×
3的矩阵。
[0074]
组合第i个用户的加速计信号acci、陀螺仪信号gyri、磁力计信号magi和方向计信号orii构成其步态序列si=[acci,gyri,magi,orii]
t
,i=1,2,
…
,n,则si是维度为12
×
li的矩阵。由此构建由n个用户组成的步态序列集
[0075]
考虑常见的步行、上楼和下楼的实际使用场景,为第i个用户的步态序列si打上用户身份标签tag
i,user
(本实施例中tag
i,user
∈{0,1,2,
…
,34})和活动场景标签tag
i,scene
(本实施例中tag
i,scene
∈{0,1,2})。第i个用户的步态序列标签为ti=(tag
i,user
,tag
i,scene
),i=1,2,
…
,n。由此形成包含n个步态序列的步态序列集s对应的标签集
[0076]
步骤(2)步态序列si可视为由12个长度为li的子序列s
i,h
构成,表示为其中s
i,h
表示第i个用户步态序列si中的第h个子序列,是维度为1
×
li的矢量,h=1,2,
…
,12。子序列s
i,h
可以表示为其中表示子序列s
i,h
的第v个采样点数值,v=1,2,
…
,li。
[0077]
如图2所示,对每个子序列s
i,h
进行数据预处理,执行线性插值、去除噪声、步态周期分割和信号分解操作,具体如下:
[0078]
(2-1)线性插值:为解决运动传感器数据实际采样不均匀的问题引入线性插值操作。将子序列s
i,h
中第v个采样点的采样时间表示为tv,判断与第v-1个采样点的采样时间t
v-1
的时间间隔δt=t
v-t
v-1
是否满足fs为采样频率,若则表示采样不均匀,当前采样点需要进行线性插值。选择当前采样点相邻的第v-1个和第v 1个采样点,对应的采样时间分别为t
v-1
、t
v 1
,对应的数值分别为根据线性插值公式计算当前采样点对应的新值其中表示插值后当前采样点对应的采样时间,满足线性插值后的步态子序列表示为是维度为1
×
li的矢量,线性插值后的步态序列表示为是维度为12
×
li的矩阵。
[0079]
(2-2)去除噪声:采用具有线性相位特性的有限冲击响应数字滤波器(finite impulse response digital filter,fir)完成对步态序列的平滑去噪,设置滤波器的截止频率fc(本实施例中fc=5hz),窗长m(本实施例中m=12),窗形状控制参数β(本实施例中β
=3.4)。得到平滑去噪后的步态序列记为其子序列记为
[0080]
(2-3)确定步态周期分割点集合由此分割步态序列
[0081]
所述的确定步态周期分割点集合是通过基于模板的步态周期分割算法完成,包括确定待选的步态模板集合、选择最优模板、确定步态周期分割点集合;
[0082]
确定待选的步态模板集合计算步态子序列中第j个采样点的最大显著性向量长度最大显著性向量是指从当前采样点开始连续递增的序列。判断最大显著性向量长度是否满足大于等于阈值,且与第j 1个采样点的最大显著性向量长度的差值也大于等于阈值,可以将判断条件表示为且其中l
thresh
(本实施例中l
thresh
=0.6fs,fs=50hz)表示阈值,往往通过大量实验确定。满足条件的采样点j可以作为步态模板的起始点,记为子序列的第k个步态模板起始点则子序列的第k个步态模板可以表示为其中表示子序列第k 1个步态模板的起始点。由此构建待选的步态模板集合ki表示第i个用户的步态子序列得到的待选步态模板总数;
[0083]
选择最优模板tempi:计算步态子序列的平均标准差其中std(
·
)为计算平均标准差的函数,计算集合中ki个待选模板temp
i,k
的平均标准差的平均标准差第k个待选模板的平均标准差和步态子序列的平均标准差两者差值的平方可以表示为选择最小的b
i,k
表示为其对应待选步态模板即为最优模板tempi;
[0084]
确定步态周期分割点集合以步态子序列的每个采样点j为起点截取与模板tempi相同长度的信号片段计算与模板的互相关其中
·
表示矢量的点乘操作,sum(
·
)表示求和操作,由此构建互相关信号r
i,h
是维度为1
×
li的矢量。互相关信号幅值的大小表示原始信号片段与模板的相似程度,找到互相关信号r
i,h
的波峰出现在第j
peak
个采样点,则获得步态周期分割点集合的第o个步态周期分割点u
i,o
=j
peak
,对应的集合表示为oi表示确定的步态周期分割点总数;
[0085]
所述的分割步态序列将步态子序列确定的步态周期分割点集合用于分
割步态序列集合中oi个步态周期分割点将步态序列分割为oi 1个步态数据样本,为步态序列分割得到的第n个步态数据样本,是维度为12
×
(u
i,n-u
i,n-1
)的矩阵。分割对应的步态数据样本标签其中是第n个步态数据样本对应的标签,存在关系对应的标签,存在关系是维度为1
×
(u
i,n-u
i,n-1
)的矢量。每个步态序列分割得到oi 1个步态数据样本,由此构建步态数据集计算步态数据集的样本总数(本实施例中q=283120)。
[0086]
(2-4)将每个步态数据样本分解为低频的粗近似信号和高频的细近似信号其中i=1,2,
…
,n,n=1,2,
…
,oi 1:
[0087]
获取低频的粗近似信号使用凯泽窗族fir低通滤波器获得低频信号,设置滤波器的截止频率f
lp
(本实施例中f
lp
=5hz),窗长m
lp
(本实施例中m
lp
=12),窗形状控制参数β
lp
(本实施例中β
lp
=3.4);
[0088]
获取高频的细近似信号使用凯泽窗族fir高通滤波器获得高频信号,设置滤波器的截止频率f
hp
(本实施例中f
hp
=10hz),窗长m
hp
(本实施例中m
hp
=12),窗形状控制参数β
hp
(本实施例中β
hp
=3.4);
[0089]
组合原始步态数据样本低频信号和高频信号获得新的步态数据样本本是维度为36
×
li的矩阵,n=1,2,
…
,oi 1,步态数据样本对应的标签与原始步态数据样本相同,其标签为新生成的步态数据集包含的样本数与原步态数据集相同,则由q个样本组成的新步态数据集可以表示为其对应的标签集为
[0090]
步骤(3)设计活动场景分类模型:
[0091]
如图3所示,该模型基于卷积神经网络(convolution neural network,cnn)、长短时记忆网络(long short time memory,lstm)和全连接层(fully connected layer,fc)串行构建,其中包含(本实施例中)个卷积层、(本实施例中)个长短时记忆层和(本实施例中)个全连接层,每个卷积层后都连接批归一化层和非线性激活层。
[0092]
步骤(4)训练活动场景分类模型,如图4所示,包括参数初始化、数据分批、数据输入、参数更新、单轮训练、训练结束判断和保存模型操作,具体如下:
[0093]
(4-1)参数初始化:随机初始化学习网络的权值参数w
scene
和偏置参数b
scene
,初始化迭代轮次e
scene
=0,设置初始学习率η
scene
=1e-4,训练样本批大小bs
scene
=128,最大迭代轮次e
scene
=100;
[0094]
(4-2)数据分批:按照设置的样本批大小bs
scene
将数据集均匀分成p
scene
(本实施例中)个批次,每个批次的步态数据子集表示为其对应的标签集为
[0095]
(4-3)数据输入:随机选取某一批次的步态数据子集送入步骤(3)构建的分类模型中,通过卷积层和长短时记忆层提取步态数据的特征表示,输入全连接层得到该批次数据的预测标签集
[0096]
(4-4)参数更新:根据该批次数据的真实标签和预测标签集计算损失函数值并并根据梯度下降法更新权值参数和偏置参数
[0097]
(4-5)单轮训练:当第e
scene
轮次的p
scene
个批次数据都输入分类模型,则表示该轮训练结束,进入步骤(4-6),否则返回步骤(4-3);
[0098]
(4-6)训练结束判断:当损失函数loss
scene
在连续es′
cene
轮内的减小幅度均小于σ
scene
,其中es′
cene
(本实施例中es′
cene
=10)为判断分类模型是否收敛的最小收敛轮数,σ
scene
(本实施例中σ
scene
=0.005)为判断loss
scene
基本不再减小的阈值,表明分类模型已收敛,执行步骤(4-8);否则执行步骤(4-7);
[0099]
(4-7)若e
scene
<e
scene
,则e
scene
=e
scene
1,继续迭代,返回步骤(4-2);若e
scene
=e
scene
,表明分类器训练结束,进入步骤(4-8);
[0100]
(4-8)模型保存:保存分类器模型的最佳权重参数和最佳偏置参数
[0101]
步骤(5)构建各个活动场景下用户分类模型:
[0102]
如图5所示,该模型基于卷积神经网络(convolution neural network,cnn)、长短时记忆网络(long short time memory,lstm)和全连接层(fully connected layer,fc)串行构建,其中包含(本实施例中)个卷积层、(本实施例中)个长短时记忆层和(本实施例中)个全连接层,每个卷积层后都连接批归一化层和非线性激活层。
[0103]
步骤(6)训练各个活动场景下的用户分类模型:
[0104]
(6-1)构建数据子集:按照活动场景标签将步态数据集分割为步行数据子集上楼数据子集下楼数据子集作为对应活动场景的训练集,其样本总数分别为a
walk
、a
up
、a
down
(本实施例中a
walk
=103131,a
up
=95515,a
down
=84474),满足a
walk
a
up
a
down
=q,q为步态数据集的样本总数。
[0105]
(6-2)参数初始化:随机初始化学习网络的权值参数w
user
和偏置参数b
user
,初始化迭代轮次e
user
=0,设置初始学习率η
user
=1e-4,训练样本批大小bs
user
=64,最大迭代轮次e
user
=20;
[0106]
(6-3)数据分批:按照设置的样本批大小bs
user
将步行、上楼和下楼场景下的训练集集均匀分成p
walk
、p
up
、p
down
(本实施例中(本实施例中)个批次,每个批次的步态数据子集表示为其对应的标签集为(6-4)数据输入:随机选取某一批次的步态数据子集送入步骤(3)构建的分类模型中,通过卷积层和长短时记忆层提取步态数据的特征表示,输入全连接层得到该批次数据的预测标签集
[0107]
(6-5)参数更新:根据该批次数据的真实标签和预测标签集计算损失函数值并根据梯度下降法更新权值参数和偏置参数
[0108]
(6-6)单轮训练:当第e
user
轮次的p
user
个批次数据都输入分类模型,则表示该轮训练结束,进入步骤(6-7),否则返回步骤(6-4);
[0109]
(6-7)训练结束判断:当损失函数loss
user
在连续eu′
ser
轮内的减小幅度均小于σ
user
,其中e
′
user
(本实施例中e
′
user
=10)为判断分类模型是否收敛的最小收敛轮数,σ
user
(本实施例中σ
user
=0.005)为判断loss
user
基本不再减小的阈值,表明分类模型已收敛,执行步骤(6-9);否则执行步骤(6-8);
[0110]
(6-8)若e
user
<e
user
,则e
user
=e
user
1,继续迭代,返回步骤(6-3);若e
user
=e
user
,表明分类器训练结束,进入步骤(6-9);
[0111]
(6-9)模型保存:保存分类器模型的最佳权重参数和最佳偏置参数
[0112]
步骤(7)认证用户身份:
[0113]
获取手机内置的加速度计信号acc、陀螺仪信号gyr、磁力计信号mag和方向计信号ori,融合形成当前用户的步态序列s=[acc,gyr,mag,ori]
t
,其中acc、gyr、mag、ori都是维度为l
×
3的矩阵,s是维度为12
×
l的矩阵,为步态序列s打上用户身份标签tag
user
和活动场景标签tag
scene
,则步态序列s对应的标签为t=(tag
user
,tag
scene
)。
[0114]
对步态序列s进行线性插值、平滑去噪、步态周期分割操作,获得按步态周期分割的步态样本其中c为分割得到的步态样本数,分割后步态样本c=1,2,
…
,c的标签与原步态序列s的标签相同,则的标签为t=(tag
user
,tag
scene
),执行过程同步骤(2-1)~(2-3);
[0115]
将分割后的步态样本分解为低频的粗近似信号和高频的细近似信号其中c=1,2,
…
,c,组合原始信号低频信号和高频信号得到用于认证用户身份的步态样本组合后的步态样本的标签与原步态样本的标签相同,则的标签为t=(tag
user
,tag
scene
),执行过程同步骤(2-4);
[0116]
将步态样本输入到训练好的活动场景分类模型,输出活动场景的预测标签tags′
cene
,根据该活动场景标签将样本输入对应的用户分类模型,判断用户的预测标签tag
′
user
与当前用户的标签tag
user
。若相同则当前用户属于合法用户,则完成身份认证,否则锁定设备,拒绝访问。
[0117]
上述实例所述的内容仅仅是对本发明实现形式的列举,本发明的保护范围不应限于实施例所陈述的具体形式,本发明的保护范围也应包含在本发明基础上所构思的同类发明方法。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。