基于区域结构信息与边缘几何惩罚的sar图像分割方法
技术领域
1.本发明属于sar图像解译技术,具体涉及一种基于区域结构信息与边缘几 何惩罚的sar图像分割方法,可用于场景分类、地形勘探、目标检测与识别等 领域。
背景技术:
2.合成孔径雷达(synthetic aperture radar,sar)成像技术具有全天时、全天 候、观测范围大、穿透力强等优势,是遥感领域重要的感知手段之一,对sar 图像的解译在感知场景信息领域具有重要的应用价值。随着成像技术的发展, sar图像的质量明显改善,对sar图像解译技术的要求更加精细化、自动化、 智能化,对算法稳健性与精度的要求也明显提高。
3.sar图像分割技术是根据不同的应用需求,将一幅sar图像分为互不重叠 的连通区域,从而剔除场景冗余内容,提供简洁的结构性信息,保障后续高层处 理的精度与效率。现有主流图像分割方法大部分处理对象是光学图像,针对sar 图像的优秀分割方法有限,而sar图像的相干成像机理,使得光学图像分割方 法容易失效。为此,需要针对sar图像的特有性质设计分割方法。基于图像的 区域、边缘等混合信息特征的区域合并类方法是一种稳健、有效的sar图像分 割方法。区域合并类分割方法主要包含初始分割和区域合并两个阶段。首先,初 始分割将一幅sar图像分割为细碎的区域块,使得相同属性的像素尽量分到同 一区域,同时避免不同特性的像素被划分到同一区域内;而在区域合并阶段,通 常根据某种策略将初始分割中的满足一定条件的两个相邻区域优先合并为新的 区域,如此不断迭代合并,直到满足预设的合并终止条件,将此时的合并结果输 出,得到最终分割结果。该过程的核心就是合并策略的设计,其中涉及图像或场 景的先验信息、区域合并顺序的选择和某些特定需求的限制条件,众多因素决定 了最终sar图像分割结果的质量。
4.在实际的场景图像分割中,除了经常使用的边缘强度、区域统计特征、灰度 概率密度函数等信息,区域内的纹理结构信息和边缘的几何特性也是一种描述 sar图像区域的关键特性,但通常容易被忽略,导致分割结果中具有不同属性 的区域容易被错分为相同区域,使得分割结果的复杂度相对较高。同时,sar 图像分辨率的日益提升,使得学者们提出的众多参数化模型对复杂场景sar图 像的描述不再充分有效。
技术实现要素:
5.本发明的目的在于提供一种基于区域结构信息与边缘几何惩罚的sar图像 分割方法,用于改善传统分割方法对场景结构信息与几何信息描述能力不足的问 题,提升对复杂场景sar图像的分割精度。
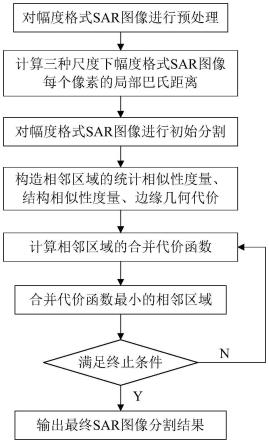
6.实现本发明的技术解决方案为:一种基于区域结构信息与边缘几何惩罚的 sar图像分割方法,其特征在于,步骤如下:
7.步骤一,对sar图像进行预处理:
8.读取尺寸为m
×
n的待分割sar图像,并将其转换为幅度格式,其中m≥ 250,n≥
250;
9.步骤二,计算幅度格式sar图像中每个像素的局部巴氏距离:
10.利用三种尺寸的矩形旋转双窗,计算量化后的sar图像中每个像素的巴氏 距离bd
θ,s
(xm,yn),(xm,yn)表示像素坐标,得到与图像尺寸一致的m
×
n维巴氏距 离:
[0011][0012]
(x,y)={(x1,y1),(x2,y1),
…
,(xm,y1),(x1,y2),(x2,y2),
…
,(xm,y2),
…
(xm,ym),
…
,(xm,yn)} ,θ表示三种尺寸旋转双窗的旋转角度,θ∈{0,π/8,2π/8,
…
7π/8};三种尺寸 旋转双窗中的单个窗口面积s分别如下:s/4、s、4s;
[0013]
步骤三,对幅度格式sar图像进行初始分割:
[0014]
步骤四,由初始分割出发,计算第i次迭代区域合并时的区域划分ri中相邻 区域之间的统计相似性度量、构造区域结构信息度量和边缘几何代价,其中 [0015]
步骤五,计算第i次迭代区域合并时的区域划分ri中相邻区域之间的合并代 价函数
[0016][0017]
其中,η表示区域结构信息的权系数,λ表示边缘几何项的权系数;
[0018]
步骤六,设置合并终止条件,即合并代价函数值得门限th∈[0,4],当某轮迭 代区域合并时,相邻区域之间的代价函数值均大于th时,区域合并结束,输出 最终的sar图像分割结果。
[0019]
本发明与现有技术相比,其显著优点在于:
[0020]
(1)相比传统方法,提出的方法对复杂场景sar图像的分割精度更高,普 适性更强。
[0021]
(2)本发明改善了对复杂场景sar图像结构信息和边缘几何信息的描述能 力,构造的区域结构信息能够更加精确地反映区域之间空间结构上的相似程度, 边缘几何惩罚能够更好地描述区域几何信息、控制分割结果的复杂度,二者之间 可以灵活取舍,满足不同场景下的不同分割需求。
附图说明
[0022]
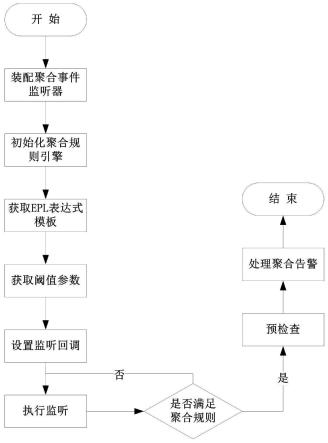
图1是本发明基于区域结构信息与边缘几何惩罚的sar图像分割方法的流 程图。
[0023]
图2为三种尺寸的矩形旋转双窗。
[0024]
图3是本发明方法与对比方法的分割结果对比图,其中图(a)为幅度格式 sar图像,图(b)为人工标注的图(a)的真实边缘,图(c)为对比方法对图 (a)的分割结果,图(d)为本发明对图(a)的分割结果。
具体实施方式
[0025]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、 完整地描述,显然,所描述的实施例仅仅是本发明的一部分实施例,而不是全部 的实施例。基于本发明中的实施例,本领域普通技术人员在没有创造性劳动前提 下所获得的所有其他实施例,都属于本发明保护的范围。
[0026]
本发明各个实施例之间的技术方案可以相互结合,但是必须是以本领域普通 技术人员能够实现为基础,当技术方案的结合出现相互矛盾或无法实现时应当认 为这种技术方案的结合不存在,也不在本发明要求的保护范围指内。
[0027]
下面将结合本设计实例对具体实施方式、以及本次发明的技术难点、发明点 进行进一步介绍。
[0028]
结合图1,一种基于区域结构信息与边缘几何惩罚的sar图像分割方法, 步骤如下:
[0029]
步骤一,对sar图像进行预处理:
[0030]
读取尺寸为m
×
n的待分割sar图像,并将其转换为幅度格式,其中m≥ 250,n≥250。
[0031]
步骤二,计算幅度格式sar图像中每个像素的局部巴氏距离:
[0032]
利用三种尺寸的矩形旋转双窗,计算量化后的sar图像中每个像素的巴氏 距离bd
θ,s
(xm,yn),(xm,yn)表示像素坐标,得到与图像尺寸一致的m
×
n维巴氏距 离:
[0033][0034]
(x,y)={(x1,y1),(x2,y1),
…
,(xm,y1),(x1,y2),(x2,y2),
…
,(xm,y2),
…
(xm,yn),
…
,(xm,yn)} ,θ表示三种尺寸旋转双窗的旋转角度,θ∈{0,π/8,2π/8,
…
7π/8}。三种尺寸 旋转双窗中的单个窗口面积s分别如下:s/4、s、4s。
[0035]
步骤三,对幅度格式sar图像进行初始分割:
[0036]
3-1)在不同尺寸、不同角度的旋转矩形双窗下,根据每个像素的局部巴氏 距离bd
θ,s
(xm,yn),融合计算幅度格式sar图像每个像素的边缘强度映射 esm(xm,yn),则m
×
n维像素的边缘强度映射记为:
[0037][0038]
对其进行滤波和阈值化处理,得到阈值化处理后的m
×
n维的边缘强度映射 esm
′
(x,y)。
[0039]
3-2)对阈值化处理后的边缘映射强度esm
′
(x,y)进行分水岭变换和粗合并, 得到包含n个区域的幅度格式sar图像的初始分割r0,其中n表示初始分割中的区域数量,表示r0中的第j个区域。
[0040]
步骤四,由初始分割出发,计算第i次迭代区域合并时的区域划分ri中相邻 区域
之间的统计相似性度量、构造区域结构信息度量和边缘几何代价,其中 [0041]
4-1)计算统计相似性度量。对相邻区域和通过二者的灰度直方图hr(t) 和hs(t)计算二者间的巴氏距离,并利用区域面积构造统计相似性度量 如下:
[0042][0043]
其中,表示区域包含的像素个数,表示区域包含的像素个数,q表示图像直方图的量化水平。
[0044]
4-2)构造区域结构信息度量计算相邻区域和的灰度均 值和并利用a
×
a的矩形结构对和进行腐蚀操作,得到区域和 其中a≥3。分别计算相邻区域和的空间协方差矩阵
[0045][0046][0047]
其中,(xr,yr)表示区域内像素的坐标,(xs,ys)表示区域内像素的坐标, τ0为空间协方差矩阵和的最大位移量,τ
x
为和水平方向的位移量,τy表示和垂 直方向的位移量,-τ0≤τ
x
,τy≤τ0。和分别表示区域和包含的像素 个数,则二者间的结构信息度量计算如下:
[0048][0049]
4-3)基于相邻区域边缘的几何特性,构造边缘几何惩罚
[0050][0051]
其中,表示相邻区域和之间的公共边缘长度, (1 (|l
r,s
|-1)/|γ
r,s
|)2表征边缘的几何复杂度,其中直线的复杂度最低,l
r,s
表示 相邻区域和公共边缘的像素集合,|l
r,s
|表示该公共边缘的长度,γ
r,s
表示 相邻区域和公共边缘用多边形逼近时需要的线段的集合,|l
r,s
|表示该集合 中的线段个数。
[0052]
步骤五,计算第i次迭代区域合并时的区域划分ri中相邻区域之间的合并代 价函数
[0053][0054]
其中,η表示区域结构信息的权系数,λ表示边缘几何项的权系数。
[0055]
步骤六,设置合并终止条件,即合并代价函数值得门限th∈[0,4],当某轮迭 代区域合并时,相邻区域之间的代价函数值均大于th时,区域合并结束,输出 最终的sar图像分割结果。
[0056]
实施例1
[0057]
步骤一,读取图3中的(a)中m
×
n维的幅度格式真实sar图像。
[0058]
在本实施例中,sar图像是合成孔径雷达terrasar成像系统拍摄的一幅 sar图像,其中m=n=500,共m
×
n=250000个像素。
[0059]
步骤二,利用如附图2所示的三种尺寸的矩形旋转双窗,计算幅度格式sar 图像中每个像素的局部巴氏距离,对sar图像中的某一像素(xm,yn),计算其局 部巴氏距离为:
[0060][0061]
其中,h
u(x,y|s,θ)
(q)和h
l(x,y|s,θ)
(q)分别表示旋转双窗在幅度格式sar图像中第q个灰 度级所对的频率,q为图像直方图的量化水平,θ为旋转双窗的角度,s为其尺 寸。
[0062]
在本实施示例中,利用灰度直方图的巴氏距离衡量局部区域的统计相似性, 无需对其进行参数化建模,因此适用于各种场景,具有更强的普适性。三种矩形 旋转双窗的旋转角度为θ∈{0,π/8,2π/8,
…
7π/8},双窗间距为1个像素宽度, 三种尺寸双窗之间的窗长之比为1:2:4,面积比位1:4:16,量化水平q=10,以像 素(xm,yn)为双窗旋转中心,通过双窗的旋转和尺寸的的变化计算(xm,yn)在每个角 度和每个尺寸下的巴氏距离bd
θ,s
(xm,yn),最终得到m
×
n维的巴氏距离:
[0063][0064]
(x,y)={(x1,y1),(x2,y1),
…
,(xm,y1),(x1,y2),(x2,y2),
…
,(xm,y2),
…
(xm,yn),
…
,(xm,yn)} 步骤三,对幅度格式sar图像进行初始分割:
[0065]
在不同尺寸、不同角度的旋转矩形双窗下,根据每个像素的局部巴氏距离 bd
θ,s
(xm,yn),融合计算幅度格式sar图像每个像素的边缘强度映射esm(xm,yn),
[0066][0067]
其中,s、m、l分别表示多尺度旋转双窗的三种尺寸,α(s)、α(m)、α(l)分 别表示三种尺寸对应的权值,且α(s) α(m) α(l)=1。则m
×
n维像素的边缘 强度映射记为:
[0068][0069]
本实施示例中,α(s)=0.5,α(m)=0.3,α(l)=0.2,利用savitzky-golay滤波 对
esm进行增强,抑制错误边缘像素的出现,然后再对其进行阈值化处理,阈 值取图像直方图0.35分位点的灰度值,得到阈值化处理后的m
×
n维的边缘强 度映射esm
′
(x,y)。
[0070]
步骤四,对阈值化处理后的边缘映射强度esm’进行分水岭变换和粗合并(像 素个数较少的区域包含信息量有限,粗合并即将这类区域就近合并至均值与其最 接近的相邻区域,这里取像素个数小于50的区域),从而得到包含n个区域的幅 度格式sar图像的初始分割r0,其中n表示初始分割 中的区域数量,表示r0中的第j个区域。
[0071]
步骤五,构造相邻区域之间的统计相似性度量、构造区域结构信息度量和边 缘几何代价,并构造区域合并代价函数。由初始分割出发,计算第i次迭代区域 合并时的区域划分ri中相邻区域之间的统计相似性度量、构造区域结构信息度 量和边缘几何代价,其中,第一次迭代是由初始分割构造,第i次迭代地区域划 分为
[0072]
首先,计算统计相似性度量。对相邻区域和通过二者的灰度直方图 hr(t)和hs(t)计算二者间的巴氏距离,用于衡量二者的统计相似性,并利用区域 面积构造统计相似性度量如下:
[0073][0074]
其中,和分别表示对应区域像素个 数。
[0075]
其次,构造区域结构信息度量计算相邻区域和的灰度均 值和并利用a
×
a的矩形结构对和进行腐蚀操作,得到区域和 其中a≥3。分别计算区域和的空间协方差矩阵
[0076][0077][0078]
其中,(xr,yr)表示区域内像素的坐标,(xs,ys)表示区域内像素的坐标, τ0为空间协方差矩阵和的最大位移量,τ0≤(a-1)/2,τ
x
为 和水平方向的位移量,τy表示和垂 直方向的位移量,-τ0≤τ
x
,τy≤τ0。和分别表示区域和包含的像素 个数,则二者间的结构信息度量计算如下:
[0079]
[0080]
然后,基于相邻区域边缘的几何特性,构造边缘几何惩罚
[0081][0082]
其中,表示相邻区域和之间的公共边缘长度, (1 (|l
r,s
|-1)/|γ
r,s
|)2表征边缘的几何复杂度,其中直线的复杂度最低。
[0083]
在本实施例中,a=5,τ0=2。
[0084]
最后,计算第i次迭代区域合并时的区域划分ri中相邻区域之间的合并代价 函数
[0085][0086]
其中,η和λ分别表示区域结构信息和边缘几何项的权系数,在本实施示例 中,η和λ的取值分别为2.5和0.6。
[0087]
步骤六,设置合并终止条件,即合并代价函数值得门限th,当某轮迭代区 域合并时,相邻区域之间的代价函数值均大于th时,区域合并结束,输出最终 的sar图像分割结果。在本实施示例中,th=1.8。
[0088]
下面结合仿真实验对本发明的技术效果作进一步的说明:
[0089]
1.实验环境与内容
[0090]
本发明实施示例验证实验在windows10平台、matlab2021b环境下进行。, 选取示例图像为德国terrasar合成孔径雷达系统拍摄的sar图像,如附图3(a) 所示,大小为500
×
500,分辨率为1m
×
1m,分别利用现有技术方法和本发明方 法进行实验,对比分割结果。
[0091]
2.实验结果分析
[0092]
参照附图3,附图3(b)是人工标注的图3(a)的真实边缘二值图像,图3(c)和 图3(d)分别是现有技术方法和本发明方法对图3(a)的分割结果,对比图3(b)可以 看到,在黑色矩形框标注的区域,可以明显看到本发明方法的分割精度更高,且 分割结果的复杂度更低。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。