1.本发明实施例涉及故障检测技术领域,尤其涉及一种光伏组件故障检测方法及系统。
背景技术:
2.随着现代科技的发展,各种工业组件的应用越来越广泛,相应的对各种工业组件的故障检测也越来越重要。
3.在某些特殊领域,如光伏电站中的光伏组件故障检测,为了降低人工检测所需的工作量,通常需要先利用无人机等设备采集光伏组件的图像,然后传回服务器进行故障检测;然而,这种方法需要占用无人机大量的系统内存,导致故障检测的效率低下。
技术实现要素:
4.本发明提供一种光伏组件故障检测方法及系统,以降低光伏组件故障检测方法所需要的设备内存,提高故障检测实时性和效率。
5.第一方面,本发明实施例提供了一种光伏组件故障检测方法,所述光伏组件故障检测方法包括:
6.前端设备采集待检测组件的图像信息;
7.前端设备判断所述图像信息是否包含代表所述待检测组件故障的故障信息;若所述图像信息包含所述故障信息,则将所述图像信息存储于所述前端设备;若所述图像信息不包含所述故障信息,则将所述图像信息删除。
8.可选地,所述前端设备判断所述图像信息是否包含代表所述待检测组件故障的故障信息包括:
9.所述前端设备对所述图像信息进行预处理,以初步判断所述图像信息是否包含故障信息;
10.所述将所述图像信息存储于所述前端设备之后还包括:
11.将存储于所述前端设备中的所述图像信息发送至后端设备。
12.可选地,所述初步判断所述图像信息是否包含故障信息之后还包括:
13.若所述图像信息包含所述故障信息,则记录所述故障信息的相对位置;
14.所述将所述图像信息存储于所述前端设备之后还包括:将所述故障信息的相对位置发送至所述后端设备。
15.可选地,所述将所述故障信息的相对位置发送至所述后端设备之后还包括:
16.判断所述后端设备是否接收成功所述图像信息及所述故障信息的相对位置,若所述后端设备接收成功所述图像信息及所述故障信息的相对位置,则所述前端设备删除所述前端设备中所述图像信息及所述故障信息的相对位置;若所述后端设备未接收成功所述图像信息及所述故障信息的相对位置,则所述前端设备保存所述前端设备中所述图像信息及所述故障信息的相对位置。
17.可选地,所述将存储于所述前端设备中的所述图像信息发送至后端设备之后还包括:
18.通过所述后端设备对所述图像信息进行二次处理,以确认所述图像信息包含的故障类型及故障严重程度;
19.和/或,利用所述后端设备显示所述图像信息,利用人工复检确认所述图像信息包含的故障类型及故障严重程度。
20.可选地,所述通过所述后端设备对所述图像信息进行二次处理包括:
21.所述后端设备利用深度学习对所述图像信息进行二次处理。
22.可选地,所述前端设备获取的图像信息为红外图像信息;所述前端设备对所述图像信息进行预处理包括:
23.对所述红外图像信息进行通道分离;
24.对分离出的各个通道进行分位点分割;
25.对进行分位点分割后的图像进行故障确认;
26.其中,所述对进行分位点分割后的图像进行故障确认包括:
27.对进行分位点分割后形成的图像进行确认,若包含满足预设条件的光斑则确定存在故障。
28.可选地,所述对分离出的各个通道进行分位点分割之后还包括:
29.对满足预设条件的光斑进行轮廓跟踪,以确定故障的相对位置。
30.可选地,所述对分离出的各个通道进行分位点分割之后还包括:
31.对分位点分割后形成的光斑进行光斑筛选,以剔除非故障光斑。
32.第二方面,本发明实施例还提供了一种光伏组件故障检测系统,所述光伏组件故障检测系统包括:
33.前端设备,配置为采集待检测组件的图像信息,并判断所述图像信息是否包含代表所述待检测组件故障的故障信息;若所述图像信息包含所述故障信息,则将所述图像信息存储于所述前端设备;若所述图像信息不包含所述故障信息,则将所述图像信息删除。
34.可选地,所述前端设备包括:
35.图像采集模块,配置为采集所述待检测组件的图像信息;
36.预处理模块,配置为判断所述图像信息是否包含代表所述待检测组件故障的故障信息;
37.逻辑模块和存储模块,所述逻辑模块配置为将包含故障信息的图像信息存储于所述存储模块,将不包含故障信息的图像信息删除。
38.可选地,所述图像采集模块配置为采集所述待检测组件的红外图像信息;
39.所述预处理模块包括:
40.通道分离单元,配置为对所述红外图像信息先进行通道分离;
41.分位点分割单元,配置为对分离出的各个通道进行分位点分割;
42.故障确认单元,配置为对进行分位点分割后的图像进行故障确认,其中,若进行分位点分割后的图像包含满足预设条件的光斑则确定存在故障。
43.可选地,所述光伏组件故障检测系统还包括后端设备;
44.所述前端设备还配置为将所述图像信息存储于所述前端设备之后,将存储于所述
前端设备中的所述图像信息发送至后端设备。
45.可选地,所述前端设备还配置为判断所述后端设备是否接收成功所述图像信息及所述故障信息的相对位置,若所述后端设备接收成功所述图像信息及所述故障信息的相对位置,则所述前端设备删除所述前端设备中所述图像信息及所述故障信息的相对位置;若所述后端设备未接收成功所述图像信息及所述故障信息的相对位置,则所述前端设备保存所述前端设备中所述图像信息及所述故障信息的相对位置。
46.可选地,所述后端设备配置为对所述图像信息进行二次处理,以确认所述图像信息包含的故障类型及故障严重程度;
47.和/或,所述后端设备显示所述图像信息,以利用人工复检确认所述图像信息包含的故障类型及故障严重程度。
48.可选地,所述后端设备为服务器,所述服务器能够与所述前端设备通讯。
49.可选地,所述前端设备为无人机。
50.本发明实施例的技术方案,采用的光伏组件故障检测方法包括:前端设备采集待检测组件的图像信息;前端设备判断图像信息是否包含代表待检测组件故障的故障信息;若图像信息包含故障信息,则将图像信息存储于前端设备;若图像信息不包含故障信息,则将图像信息删除。前端设备可对采集到的图像信息进行实时处理,当图像信息包含故障信息时,前端设备保留该图像信息;而当采集到的图像信息不包含故障信息时,表明该图像对应的待检测组件处于正常状态,前端设备将该图像信息删除,从而节省前端设备的内存空间,从而使得前端设备能够采集更大面积的待检测组件,提高光伏组件故障检测的实时性和效率。
附图说明
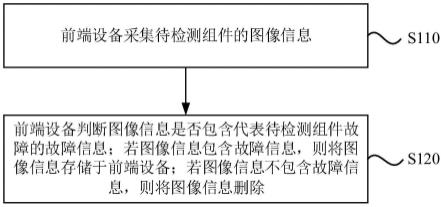
51.图1为本发明实施例提供的一种光伏组件故障检测方法的流程图;
52.图2为本发明实施例提供的又一种光伏组件故障检测方法的流程图;
53.图3为本发明实施例提供的又一种光伏组件故障检测方法的流程图;
54.图4为本发明实施例提供的又一种光伏组件故障检测方法的流程图;
55.图5为本发明实施例提供的一种光伏组件故障检测系统的结构示意图;
56.图6为本发明实施例提供的一种预处理模块的结构示意图;
57.图7为本发明实施例提供的又一种预处理模块的结构示意图;
58.图8为本发明实施例提供的又一种光伏组件故障检测系统的结构示意图。
具体实施方式
59.下面结合附图和实施例对本发明作进一步的详细说明。可以理解的是,此处所描述的具体实施例仅仅用于解释本发明,而非对本发明的限定。另外还需要说明的是,为了便于描述,附图中仅示出了与本发明相关的部分而非全部结构。
60.正如背景技术中提到的现有的光伏组件故障检测方法存在需要占用检测设备(如无人机)大量系统内存的情况,发明人经过仔细研究发现,产生此技术问题的原因在于:在某些检测条件下,如高山、丛林或者荒漠中等,无人机通常无法与地面的服务器进行有效通信,因此无人机需要拍摄大量的图像,大量的图像需要占用无人机大量的内存,并且一方面
为了保证无人机的灵活性以及低成本等,无人机的内存也较低;另一方面,大量不包含故障信息的图片上传到服务器需要大量的时间,上传速度较慢,且服务器也需要花费大量的时间去处理无故障的图片,进而导致检测效率和检测实时性也较低。
61.基于上述技术问题,本发明提出如下解决方案:
62.图1为本发明实施例提供的一种光伏组件故障检测方法的流程图,光伏组件故障检测方法可应用于对组件故障进行检测的场景,尤其可应用于处于高山、丛林或荒漠等通讯条件较差的场景中;参考图1,光伏组件故障检测方法包括:
63.步骤s110,前端设备采集待检测组件的图像信息;
64.具体地,前端设备例如可以是无人机,待检测组件例如可以是光伏组件等占地面积较大,难以进行人工检测的组件;前端设备中可以包含图像采集模块,利用图像采集模块对待检测组件进行图像采集;需要说明的是,当前端设备和后端设备通讯条件较差时,可预设好前端设备的移动轨迹以及移动时间(如无人机的飞行轨迹),以保证前端设备采集完预定区域的图像后,能够返回至或移动到预设地点,以在预设地点和后端设备进行通信,或者在预设地点由工作人员对前端设备进行操作。优选地,前端设备采集的图像信息可以是红外图像信息。
65.步骤s120,前端设备判断图像信息是否包含代表待检测组件故障的故障信息;若图像信息包含故障信息,则将图像信息存储于前端设备;若图像信息不包含故障信息,则将图像信息删除。
66.具体地,待检测组件存在故障时,故障位置通常与正常位置存在差异,例如光伏组件故障位置通常温度较高,红外图像信息上故障位置会表现出亮斑;前端设备可对采集到的图像信息进行实时处理,当图像信息包含故障信息时,前端设备保留该图像信息;而当采集到的图像信息不包含故障信息时,表明该图像对应的待检测组件处于正常状态,前端设备将该图像信息删除,从而节省前端设备的内存空间,从而使得前端设备能够采集更大面积的待检测组件,提高光伏组件故障检测的实时性和效率。
67.本实施例的技术方案,采用的光伏组件故障检测方法包括:前端设备采集待检测组件的图像信息;前端设备判断图像信息是否包含代表待检测组件故障的故障信息;若图像信息包含故障信息,则将图像信息存储于前端设备;若图像信息不包含故障信息,则将图像信息删除。前端设备可对采集到的图像信息进行实时处理,当图像信息包含故障信息时,前端设备保留该图像信息;而当采集到的图像信息不包含故障信息时,表明该图像对应的待检测组件处于正常状态,前端设备将该图像信息删除,从而节省前端设备的内存空间,从而使得前端设备能够采集更大面积的待检测组件,提高光伏组件故障检测的实时性和效率。
68.可选地,图2为本发明实施例提供的又一种光伏组件故障检测方法的流程图,参考图2,前端设备判断图像信息是否包含待检测组件故障的故障信息包括:
69.步骤s121,前端设备对图像信息进行预处理,以初步判断图像信息是否包含故障信息;若图像信息包含故障信息,则将图像信息存储于前端设备;若图像信息不包含故障信息,则将图像信息删除;
70.具体地,前端设备需要保证灵活性,可以不对图像信息进行深度处理,仅仅初步筛选采集的图像信息是否包含故障信息,由此可以降低前端设备中搭载的图像处理方法的复
杂度,从而降低前端设备的复杂度,减少故障判断所需的时间,对前端设备的硬件要求度也较低,也即使得光伏组件故障检测方法可以搭载在前端设备中,提高光伏组件故障检测的实时性。
71.将图像信息存储于前端设备之后还包括:
72.步骤s130,将存储于前端设备中的图像信息发送至后端设备。
73.具体地,由于前端设备对图像信息仅是进行了初筛,可能会导致误判,也即将实际不存在故障信息的图像信息误认为存在故障信息;因此,在前端设备与后端设备能够通讯后,可将前端设备内存储的图像信息一并发送至后端设备,从而进一步确认保存的图像信息中是否存在误判。后端设备例如可以是服务器,前端设备能够与服务器进行通讯。通讯方式例如可以是无线通讯或者有线通讯等,本实施例对此不作具体限定。并且优选地,在某些实施方式中,后端设备还可以是判断故障信息的具体类型,从而使得工作人员可以针对性地进行维修。
74.优选地,由于在前端设备采集待检测组件的过程中,前端设备与后端设备之间可能无法建立通讯连接,可设定当前端设备中存储的图像信息所占的存储空间达到第一预设阈值后,前端设备即不再进行图像采集,而是尽快移动至设定好的预设地点;第一预设阈值可根据具体情况而定,例如可以是前端设备总存储空间的90%。另外,还可以设定当前端设备的电量达到第二预设阈值后,也不再进行图像采集,而是尽快移动至设定好的预设地点;第二预设阈值也可根据具体情况而定,例如可以是前端设备总电量的20%。
75.另外,优选地,当前端设备在采集待检测组件的图像信息时,能够与后端设备建立良好的通讯连接,此时前端设备可不对图像信息进行处理,而是直接发送至后端设备。
76.可选地,图3为本发明实施例提供的又一种光伏组件故障检测方法的流程图,参考图3,在本实施例中,在步骤s110后包括步骤s122:前端设备对图像信息进行预处理,以初步判断图像信息是否包含故障信息;若图像信息包含故障信息,则将图像信息存储于前端设备,并记录故障信息的相对位置;若图像信息不包含故障信息,则将图像信息删除;
77.前端设备对图像信息进行预处理时,若判断出图像信息中包含故障信息,之后便进一步判断故障信息在图像信息中的相对位置,例如光伏组件对应的亮斑在图像信息中的具体位置;
78.步骤s131,将存储于前端设备中的图像信息发送至后端设备,将故障信息的相对位置发送至后端设备。
79.具体地,前端设备可将存储于前端设备中的图像信息和故障信息的相对位置同时发送至后端设备;也可以先将图像信息发送至后端设备,再将故障信息的相对位置发送至后端设备;还可以是先将故障信息的相对位置发送至后端设备,再将图像信息发送至后端设备,本实施例对此不作具体限定。后端设备接收到图像信息和故障信息对应的相对位置,从而能够快速地对故障信息进行定位,从而进一步确认故障类型以及故障程度,使得运维人员能够做维修优先级的设定。
80.更优选地,前端设备在采集图像信息时,该图像信息包含图像信息中对应待检测组件的部分所在的具体位置,例如图像信息包含经纬度坐标等,从而便于判断待检测组件具体故障的位置。
81.优选地,将故障信息的相对位置发送至后端设备之后还包括:
82.判断后端设备是否接收成功图像信息及故障信息的相对位置,若后端设备接收成功图像信息及故障信息的相对位置,则前端设备删除前端设备中图像信息及故障信息的相对位置;若后端设备未接收成功图像信息及故障信息的相对位置,则前端设备保存前端设备中图像信息及故障信息的相对位置。
83.具体地,后端设备接收成功图像信息及故障信息的相对位置之后,可向前端设备发送接收成功指令,前端设备只有接收到接收成功指令之后,才会将前端设备中存储的图像信息及故障信息的相对位置删除,并且优选地接收到接收成功指令后前端设备立即删除存储的图像信息及故障信息的相对位置;若未接收到接收成功指令,说明后端设备可能没有接收到图像信息以及故障信息的相对位置,此时可不删除前端设备中存储的图像信息及故障信息的相对位置,并采用其它方式(如u盘等)将图像信息及故障信息的相对位置发送至后端设备,从而保证后端设备能够接收到图像信息及故障信息的相对位置,另外还可以进一步节省前端设备的内存,使得前端设备可以巡检更多的区域,提高检测效率和实时性。
84.可选地,图4为本发明实施例提供的又一种光伏组件故障检测方法的流程图,参考图4,将存储于前端设备中的图像信息发送至后端设备之后还包括:
85.步骤s140,通过后端设备对图像信息进行二次处理,以确认图像信息包含的故障类型及故障严重程度;和/或,利用后端设备显示图像信息,利用人工复检确认图像信息包含的故障类型及故障严重程度。
86.具体地,后端设备可以利用准确度更高的算法对从前端设备接收到的图像信息进行二次处理,例如可以通过深度学习的方法对图像信息进行二次处理,从而确认图像信息包含的故障类型以及严重程度,故障类型例如可以是遮挡物遮挡或者光伏面板损坏等,严重程度例如可以是轻、中或者重等。另外,也可仅利用后端设备对图像信息进行显示,随后工作人员对显示的图像进行人工处理,从而判断该图像信息中包含的故障类型以及严重程度。本实施例中,通过对前端设备存储的图像信息进行复检,可确认包含的故障类型以及严重程度。
87.可选地,前端设备获取的图像信息为红外图像信息;
88.前端设备对图像信息进行预处理包括:
89.对图像信息进行通道分离;
90.对分离出的各个通道进行分位点分割;
91.对进行分位点分割后的图像进行故障确认;
92.其中,对进行分位点分割后的图像进行故障确认包括:
93.对进行分位点分割后形成的图像进行确认,若包含满足预设条件的光斑则确定存在故障。。
94.具体地,以待检测组件为光伏组件,前端设备为无人机,采集的图像信息为红外图像信息为例进行说明。预设条件例如可以是面积超过预设值,以及形状为特定形状等;光斑的面积若比较小,有可能不是因为待检测组件故障而引起的光斑,而可能仅仅是图像本身的问题,又或者光斑为特定形状(如条形的亮斑),例如光伏组件中的二极管在故障时会发光,从而产生条形的亮斑;前端设备首先对采集到的图像信息进行通道分离,也即将红外图片分离成红、绿、蓝三个通道;随后,分别在三个通道上对像素灰度值进行分位点求解,分位点的具体值本实施例不作具体限定,优选地可以是0.999,对低于分位点像素值的像素置
零,对高于分位点的像素值进行保留,此步骤之后图像信息将会保留各通道中像素亮度最高的一部分值。随后,即可对分位点分割后的图像进行故障确认,若像素亮度高的部分所占的面积很小,可认为不存在故障信息,若像素亮度高的部分所占的面积很大,可认为存在故障信息。
95.需要说明的是,在其它一些实施方式中,前端设备对图像信息进行预处理包括:对图像信息进行灰度化,此种方式的图像仅存在一个通道,处理过程较为简单;随后再对得到的通道进行分位点分割,对分位点分割后的图像进行故障确认。
96.可选地,对分离出的各个通道进行分位点分割之后还包括:
97.对满足预设条件的光斑进行轮廓追踪,以确定光斑的相对位置。
98.具体地,在轮廓追踪之前可先对各通道进行腐蚀膨胀,从而对部分离群的像素点进行删除,从而剔除干扰。轮廓跟踪也即对保留的各通道高亮度像素经腐蚀膨胀后的区域进行边界轮廓拟合,从而确定光斑在图像信息中的相对位置。
99.可选地,对分离出的各个通道进行分位点分割之后还包括:对分位点分割后形成的光斑进行光斑筛选,以剔除非故障光斑。
100.具体地,可根据每个光斑的面积对光斑进行筛选,若光斑面积超过预设面积阈值,则表明该光斑是因待检测组件故障引起的,则确定该光斑为故障信息;而若光斑面积不超过预设面积阈值,则表明该光斑为非故障光斑,也即此光斑不是故障信息。预设面积阈值可根据具体情况设定,本实施例对此不作具体限定。
101.本发明实施例还提供了一种光伏组件故障检测系统,如图5所示,图5为本发明实施例提供的一种光伏组件故障检测系统的结构示意图,光伏组件故障检测系统包括:
102.前端设备10,配置为采集待检测组件的图像信息,并判断图像信息是否包含代表待检测组件故障的故障信息;若图像信息包含故障信息,则将图像信息存储于前端设备;若图像信息不包含故障信息,则将图像信息删除。
103.具体地,前端设备例如可以是无人机,待检测组件例如可以是光伏组件等占地面积较大,难以进行人工检测的组件;前端设备对待检测组件进行图像采集;需要说明的是,当前端设备和后端设备通讯条件较差时,可预设好前端设备的移动轨迹以及移动时间(如无人机的飞行轨迹),以保证前端设备采集完预定区域的图像后,能够返回至或移动到预设地点,以在预设地点和后端设备进行通信,或者在预设地点由工作人员对前端设备进行操作。优选地,前端设备采集的图像信息可以是红外图像信息。待检测组件存在故障时,故障位置通常与正常位置存在差异,例如光伏组件故障位置通常温度较高,红外图像信息上故障位置会表现出亮斑;前端设备可对采集到的图像信息进行实时处理,当图像信息包含故障信息时,前端设备保留该图像信息;而当采集到的图像信息不包含故障信息时,表明该图像对应的待检测组件处于正常状态,前端设备将该图像信息删除,从而节省前端设备的内存空间,从而使得前端设备能够采集更大面积的待检测组件,提高光伏组件故障检测的实时性和效率。
104.本实施例的技术方案,采用的光伏组件故障检测系统包括前端设备,前端设备配置为采集待检测组件的图像信息,并判断图像信息是否包含代表待检测组件故障的故障信息;若图像信息包含故障信息,则将图像信息存储于前端设备;若图像信息不包含故障信息,则将图像信息删除。前端设备可对采集到的图像信息进行实时处理,当图像信息包含故
障信息时,前端设备保留该图像信息;而当采集到的图像信息不包含故障信息时,表明该图像对应的待检测组件处于正常状态,前端设备将该图像信息删除,从而节省前端设备的内存空间,从而使得前端设备能够采集更大面积的待检测组件,提高光伏组件故障检测的实时性和效率。
105.可选地,继续参考图5,前端设备10包括:图像采集模块101,配置为采集待检测组件的图像信息;预处理模块102,配置为判断图像信息是否包含代表待检测组件故障的故障信息;逻辑模块103和存储模块104,逻辑模块103配置为将包含故障信息的图像信息存储于存储模块,将不包含故障信息的图像信息删除。
106.具体地,图像采集模块101例如可以是红外摄像头;预处理模块102例如可以是图像处理器;逻辑模块103例如可以是控制器;存储模块104例如可以是存储器,存储器可以包括高速随机存取存储器,还可以包括非易失性存储器,例如至少一个磁盘存储器件、闪存器件、或其他非易失性固态存储器件。本实施例的技术方案,前端设备中需要搭载的硬件模块较少,对硬件模块的性能要求也较低,从而能够极大地提高前端设备的灵活性。
107.可选地,图6为本发明实施例提供的一种预处理模块的结构示意图,参考图6,图像采集模块配置为采集所述待检测组件的红外图像信息;预处理模块包括:通道分离单元1021,配置为对图像信息先进行通道分离;分位点分割单元1022,配置为对分离出的各个通道进行分位点分割;故障确认单元1023,配置为对进行分位点分割后的红外图像进行故障确认;其中,若进行分位点分割后的图像包含满足预设条件的光斑则确定存在故障。
108.具体地,通道分离单元1021首先对采集到的图像信息进行通道分离,也即将红外图片分离成红、绿、蓝三个通道;随后,利用分位点分割单元1022分别在三个通道上对像素灰度值进行分位点求解,分位点的具体值本实施例不作具体限定,优选地可以是0.999,对低于分位点像素值的像素置零,对高于分位点的像素值进行保留,此步骤之后图像信息将会保留各通道中像素亮度最高的一部分值。随后,即可利用故障确认单元1023对分位点分割后的图像进行故障确认,若像素亮度高的部分所占的面积很小,可认为不存在故障信息,若像素亮度高的部分所占的面积很大,可认为存在故障信息。
109.可选地,在其它一些实施方式中,预处理模块也可包括:灰度化单元、分位点分割单元和故障确认单元;灰度化单元对图像信息进行灰度化,此种方式的图像仅存在一个通道,处理过程较为简单;随后再对得到的通道利用分位点分割单元进行分位点分割,对分位点分割后的图像利用故障确认单元进行故障确认。
110.优选地,图7为本发明实施例提供的又一种预处理模块的结构示意图,参考图7,预处理模块102还可包括:腐蚀膨胀单元1024,配置为对各通道进行腐蚀膨胀;轮廓追踪单元1025,配置为对分位点分割后形成的光斑进行轮廓追踪,以确定光斑的相对位置;光斑筛选单元1026,配置为对分位点分割后形成的光斑进行光斑筛选,以剔除非故障光斑。
111.具体地,在轮廓追踪之前可先利用腐蚀膨胀单元1024对各通道进行腐蚀膨胀,从而对部分离群的像素点进行删除,从而剔除干扰。随后利用轮廓追踪单元1025对保留的各通道高亮度像素经腐蚀膨胀后的区域进行边界轮廓拟合,从而确定光斑在图像信息中的相对位置。光斑筛选单元1026可根据每个光斑的面积对光斑进行筛选,若光斑面积超过预设面积阈值,则表明该光斑是因待检测组件故障引起的,则确定该光斑为故障信息;而若光斑面积不超过预设面积阈值,则表明该光斑为非故障光斑,也即此光斑不是故障信息。
112.可选地,图8为本发明实施例提供的又一种光伏组件故障检测系统的结构示意图,参考图8,光伏组件故障检测系统还包括后端设备20;前端设备10还配置为将图像信息存储于前端设备10之后,将存储于前端设备10中的图像信息发送至后端设备20。
113.具体地,前端设备巡检可得到红外图像信息,随后前端设备对红外图像信息进行故障检测,故障检测后进行逻辑处理,也即判断是否存在故障,若存在故障则将故障图片和故障图片中的故障位置进行存储;若不存在故障,则将红外图片删除;由于前端设备对图像信息仅是进行了初筛,无法确定故障类型和严重程度;因此,在前端设备10与后端设备20能够通讯后,可将前端设备内存储的图像信息一并发送至后端设备,从而进一步确认保存的图像信息中故障类型以及严重程度。后端设备例如可以是服务器,前端设备能够与服务器进行通讯。通讯方式例如可以是无线通讯或者有线通讯等,本实施例对此不作具体限定。
114.可选地,前端设备还配置为判断后端设备是否接收成功图像信息及故障信息的相对位置,若后端设备接收成功图像信息及故障信息的相对位置,则前端设备删除前端设备中图像信息及故障信息的相对位置;若后端设备未接收成功图像信息及故障信息的相对位置,则前端设备保存前端设备中图像信息及故障信息的相对位置。后端设备接收成功图像信息及故障信息的相对位置之后,可向前端设备发送接收成功指令,前端设备只有接收到接收成功指令之后,才会将前端设备中存储的图像信息及故障信息的相对位置删除,并且优选地接收到接收成功指令后前端设备立即删除存储的图像信息及故障信息的相对位置;若未接收到接收成功指令,说明后端设备可能没有接收到图像信息以及故障信息的相对位置,此时可不删除前端设备中存储的图像信息及故障信息的相对位置,并采用其它方式(如u盘等)将图像信息及故障信息的相对位置发送至后端设备,从而保证后端设备能够接收到图像信息及故障信息的相对位置,另外还可以进一步节省前端设备的内存,使得前端设备可以巡检更多的区域,提高检测效率和实时性。
115.可选地,后端设备20配置为对图像信息进行二次处理,以确认图像信息包含的故障类型及故障严重程度;和/或,后端设备20显示图像信息,以利用人工复检确认图像信息包含的故障类型及故障严重程度。
116.具体地,后端设备20可以利用准确度更高的算法对从前端设备10接收到的图像信息进行二次处理,例如可以通过深度学习的方法对图像信息进行二次处理,从而确认图像信息中包含的故障类型以及严重程度,故障类型例如可以是遮挡物遮挡或者光伏面板损坏等,严重程度例如可以是轻、中或者重等。另外,也可仅利用后端设备20对图像信息进行显示,随后工作人员对显示的图像进行人工处理,从而判断该图像信息中包含的故障类型以及严重程度。本实施例中,通过对前端设备10存储的图像信息进行复检,可确认包含的故障类型以及严重程度,提高光伏组件故障检测方法的检测准确性。
117.本实施例的方案,前端设备可对采集到的图像信息进行实时处理,当图像信息包含故障信息时,前端设备保留该图像信息;而当采集到的图像信息不包含故障信息时,表明该图像对应的待检测组件处于正常状态,前端设备将该图像信息删除,从而节省前端设备的内存空间,从而使得前端设备能够采集更大面积的待检测组件,提高光伏组件故障检测的实时性和效率。
118.注意,上述仅为本发明的较佳实施例及所运用技术原理。本领域技术人员会理解,本发明不限于这里所述的特定实施例,对本领域技术人员来说能够进行各种明显的变化、
重新调整和替代而不会脱离本发明的保护范围。因此,虽然通过以上实施例对本发明进行了较为详细的说明,但是本发明不仅仅限于以上实施例,在不脱离本发明构思的情况下,还可以包括更多其他等效实施例,而本发明的范围由所附的权利要求范围决定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
