1.本发明属于控制理论与控制工程技术领域,涉及量测不确定的非线性系统自适应控制方法,具体涉及一种基于输出反馈的非线性感应加热电路系统的控制方法。
背景技术:
2.线性控制理论是系统与控制理论中最为成熟和最为基础的一个组成分支,是现代控制理论的基石,在过去的几十年间,学者们针对线性系统已经研究出一套较为完善的控制理论。但是在工程领域中,纯粹的线性系统几乎是不存在的,大多数实际系统都包含一些非线性部分,例如死区、磁滞、饱和等。传统的控制方法往往忽略这些非线性环节或者将非线性部分近似线性化。但随着工程中系统变得越来越复杂、对控制效果的要求越来越高,许多系统不再适合建模成线性系统处理,此时越来越多的学者开始进行非线性系统的研究。但由于非线性系统更多样、更复杂的结构,无法形成一套通用的非线性控制理论,只能针对不同结构的非线性系统提出不同的控制方案,因此研究非线性系统的控制方法,无论在理论上还是在实际应用上,都是非常有意义的研究课题。
3.众所周知,有许多实际的系统,例如通讯系统、化工系统、航空航天系统、电力系统和网络传输系统等,其当前状态都不可避免地受到过去状态的影响,即当前状态的变化率不仅与当前时刻的状态有关,还依赖于过去某时刻或某段时间的状态——这种特性称为时滞。在研究自然界客观事物的运动规律时,由于其复杂性和多样性,总是不可避免地存在滞后现象。因此时滞与时滞系统是现实生活与工程技术中普遍遇到的一个实际问题。时滞的存在,一方面使得系统的动态性能变差甚至导致系统不稳定。但是另一方面,可以在某些控制系统中利用时滞改善控制效果,譬如重复控制系统以及有限时间稳定性控制等,都需要利用时滞来达到该目的。为了更好地利用时滞来解决实际问题以及避免其不利后果,研究时滞现象对动态系统的影响是非常有必要的。
4.状态反馈和输出反馈是控制系统设计中两种主要的反馈策略,其原理是分别将观测到的状态和输出作为反馈量,构成反馈律,实现对系统的闭环控制,以达到期望的对系统性能指标的要求。但在实际生产生活中,由于经济等原因,系统的全部状态无法全部测得,此时构造观测器估计系统状态并设计基于观测器和系统输出的控制器是很有必要的。同时在实际生产过程中,由于测量不完善和人们的认识不足,例如由于环境因素或传感器等测量仪器的测量误差或系统参数不准确等原因的影响,所得到的被测量值具有分散性,即每次测得的结果不是同一值,而是以一定的概率分散在某个区域内的许多个值,又或者说系统的输出可能与实际值存在显著差异,或者说系统输出中存在不确定性信息,其称为量测不确定性。在生物医学设备、电路、电气设备和机械系统中,经常会遇到系统输出的不确定性。因此,如何处理量测不确定度也成为控制领域学者的研究对象。
技术实现要素:
5.针对现有技术的不足,本发明提出了一种基于输出反馈的非线性感应加热电路系
统的控制方法,实现对存在量测不确定性和输入时滞的系统进行闭环系统状态的自适应调节。
6.一种基于输出反馈的非线性感应加热电路系统的控制方法,具体包括以下步骤:
7.步骤1:建立非线性感应加热电路系统的动态模型
8.忽略电路元件形变对系统造成的影响,建立如下非线性感应加热电路系统的动态模型:
[0009][0010][0011]
y=θ(dv
c-i
l
)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(1)
[0012]
其中,分别代表两个电压源的电压,vc代表电容器c两端的电压,r1、r2表示电阻阻值,l表示电感器l的电感值,i
l
表示流过电感器l的电流,dvc表示通过电压控电流源的电流,y表示系统传感器测得的输出信号,t表示时间,sign(
·
)代表符号函数,s代表由于状态切换产生的时间延迟,θ代表量测不确定性,且满足θ、为未知常数。分别表示vc、i
l
对时间的一阶导数。c=1nf、r1=r2=1kω、l=1mh、d=2ma/v。
[0013]
同时定义x1=2v
c-i
l
,x2=v
c-i
l
,将系统的动态模型转换为状态空间表达形式:
[0014][0015][0016]
y=θx1ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(2)
[0017]
其中,分别表示x1、x2对时间的一阶导数。
[0018]
步骤2:设计自适应输出反馈控制器
[0019]
针对步骤1得到的系统状态空间表达式,设计输出反馈控制器:
[0020]
[0021]
其中,为状态重构器的状态值,u表示控制输入,分别表示对时间的一阶导数,表示动态增益的初值,a1、a2是hurwitz多项式g2 a1g a2的系数,代表自适应增益,表示的一阶导数,ρ为一个常数,k1、k2、q为待求解的常数。
[0022]
步骤3:控制效果分析以及相关参数选择
[0023]
基于步骤1、2得到的系统状态空间表达式和输出反馈控制器,定义如下的误差状态变换:
[0024][0025]
并构造一组虚拟控制律y
*
,以及状态变换η1,η2如下:
[0026][0027]
其中k1=1、k2=3k1 1=4和
[0028]
令ε=[ε1,ε2]
t
,将系统(2)和(3)转换为如下形式:
[0029][0030]
其中φ=[φ1,0]
t
、分别为ε1,ε2对时间的一阶导数,同时有:
[0031][0032]
其中为η1对时间的一阶导数。
[0033]
为了说明上述设计的控制器的正确性同时为了处理输入中的时滞,为非线性感应加热电路系统构造如下的lyapunov-krasovskii泛函:
[0034][0035]
对其求导可以得到:
[0036][0037]
其中βi,i=1,2,3以及bi,i=1,2是一些常数。
[0038]
基于公式(9)可以得到是有界的,||x||2《 ∞,以及以及进而可以通过芭芭拉特引理得到
[0039][0040]
因此可以得出闭环系统的所有信号都是最终收敛到零的。
[0041]
本发明具有以下有益效果:
[0042]
针对系统中存在的量测不确定性以及输入时滞,基于自适应输出反馈控制方法设计低增益输出反馈控制器,本方法允许量测不确定性的界限未知,结合反步法以及设计常数,有效的解决了量测不确定性界限未知的情况,设计的基于低增益观测器的控制器具有鲁棒性,能够有效的补偿系统的量测不确定性。此外还通过lyapunov-krasovskii泛函有效的解决了输入时滞的问题,从而实现闭环系统状态的自适应调节。本控制方法更贴合工程应用中的实际情况,并且更具有普适性。
附图说明
[0043]
图1为非线性感应加热电路系统电路原理图;
[0044]
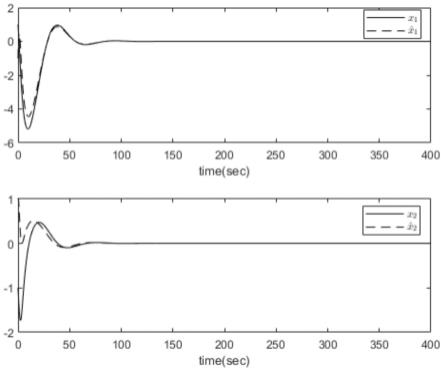
图2为系统状态空间表达式与输出反馈控制器组成的闭环系统的状态轨迹图;
[0045]
图3是闭环系统控制输入和自适应增益轨迹图;
[0046]
图4是非线性感应加热电路系统电容器电压和电感器电流轨迹图。
具体实施方式
[0047]
以下结合附图对本发明作进一步的解释说明;
[0048]
一种基于输出反馈的非线性感应加热电路系统的控制方法,具体包括以下步骤:
[0049]
步骤1:建立非线性感应加热电路系统的动态模型
[0050]
非线性感应加热电路原理图如图1所示,忽略系统中一些电路原件形变对模型的影响,建立如下动态模型:
[0051][0052][0053]
y=θ(dv
c-i
l
)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(1)
[0054]
其中,分别代表两个电压源的电压,vc代表电容器c两端的电压,i
l
表示流过电感器l的电流,c=1nf,r1=r2=1kω,l=1mh,dvc表示通过电压控电流源的电流,d=2ma/v。y表示系统传感器测得的输出信号,t表示时间,sign(
·
)代表符号函数,s代表由于状态切换产生的时间延迟,θ代表量测不确定性,且满足θ、为未知常数。为未知常数。分别表示vc、i
l
对时间的一阶导数。
[0055]
定义x1=2v
c-i
l
,x2=v
c-i
l
,将系统的动态模型转换为状态空间表达形式:
[0056][0057][0058]
y=θx1ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(2)
[0059]
其中,分别表示x1、x2的一阶导数。
[0060]
步骤2:设计自适应输出反馈控制器:
[0061]
针对步骤1得到的系统状态空间表达式,设计输出反馈控制器:
[0062][0063]
其中,为状态重构器的状态值,u表示控制输入,分别表示对时间的一阶导数,表示自适应增益的初值,,a1、a2是hurwitz多项式g2 a1g a2的系数,表示的一阶导数,ρ为一个常数,k1、k2、q为待求解的常数。
[0064]
步骤3:分析控制效果:
[0065]
对步骤2设计的输出反馈控制器的控制性能进行分析。
[0066]
定义如下矩阵:
[0067][0068]
因为矩阵a、d是hurwitz矩阵,因此存在合适的a1、a2和正定矩阵p=p
t
满足:
[0069]at
p pa≤-i2,dp pd≥0
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(5)
[0070]
其中i2表示2维单位矩阵。
[0071]
定义如下误差状态变换:
[0072][0073]
然后构造一组虚拟控制律y
*
、以及状态变换η1、η2:
[0074][0075]
其中k1=1、k2=3k1 1=4、
[0076]
令ε=[ε1,ε2]
t
,将系统的状态空间表达式(2)和输出反馈控制器(3)转换为:
[0077][0078]
其中φ=[φ1,0]
t
、分别表示ε1,ε2对时间的一阶导数。
[0079][0080]
其中表示η1对时间的一阶导数。
[0081]
为了保证上述设计的输出反馈控制器的正确性,同时为了处理输入存在的时滞,因此构造如下的lyapunov-krasovskii泛函:
[0082][0083]
对其求导可以得到:
[0084][0085]
其中βi,i=1,2,3以及bi,i=1,2是一些常数。
[0086]
假设解的最大存在区间为[0,tf)且tf∈(0, ∞],在公式(11)的基础上,证明闭环系统的所有状态都是趋于零的:
[0087]
①
利用反证法证明自适应增益是有界的:
[0088]
假设因此存在一个时间t1∈(0,tf)满足:
[0089]
使得:
[0090]
[0091]
其中η=[η1,η2]
t
,σ是满足1《σ《1-k2q q的常数,同时公式(12)也说明||ε||《 ∞,||η||《 ∞,因此:
[0092][0093]
因此自适应增益是有界的。
[0094]
②
证明是有界的:
[0095]
重新定义如下的状态变换:
[0096][0097]
令z=[z1,z2]
t
,a=[a1,a2]
t
,b=[0,1]
t
,可以得到:
[0098][0099]
选择lyapunov函数vz=z
t
pz,并对其求导可以得到:
[0100][0101]
其中r是一个常数,通过对公式(16)在(0,t)上进行积分并变化可以得到:
[0102][0103]
③
证明x=[x1,x2]
t
是有界的:
[0104]
定义新的状态变换如下:
[0105][0106]
令ξ=[ξ1,ξ2]
t
,并选择如下的lyapunov-krasovskii泛函
[0107][0108]
其中c,是常数。选择l
*
≥32c||p||,同时对公式(18)求导可以得到:
[0109][0110]
其中c
ξ
是一个常数。通过对公式(19)在(0,t)上进行积分,可以得到:||x||2《 ∞,综上可得:tf= ∞,进而通过芭芭拉特引理得到:
[0111][0112]
因此可以得出闭环系统的所有信号都是最终收敛到零的。
[0113]
步骤4:选择控制器参数:
[0114]
在本实施例中,选择观测器参数a1=3,a2=3以及设计参数q=0.01,得到如下输出反馈控制器:
[0115][0116]
系统初值为x1(τ)=1,x2(τ)=-1,观测器初值自适应动态增益初值系统量测不确定性为θ=0.8。图2、图3分别为系统状态空间表达式与输出反馈控制器组成的闭环系统的状态轨迹图,以及闭环系统控制输入和自适应增益轨迹图;图4为原系统电容器电压和电感器电流轨迹图。从图中可以看到不论是系统状态空间表达式还是输出反馈控制器的状态最终都是趋于零的,动态增益是有界的,同时其过渡过程震荡并不激烈可以运用到实际中,因此可以得到提出的控制器达到了预期的控制目标——渐近稳定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。