一种基于高精地图和路侧感知的brt自动停靠车站方法
技术领域
1.本发明涉及车路协同技术,尤其是涉及一种基于高精地图和路侧感知的brt自动停靠车站方法。
背景技术:
2.如图3所示,大唐移动协助打造了厦门brt停靠站辅助系统,按照大唐的方案架构,系统基于高精度地图和航向角、惯导和曲率的组合定位实现公交车停靠站辅助,这种情况下,如果出现意外情况(如有人站下马路上而不是车站内或车站周围有障碍物等),仍需要依靠驾驶员人工判定,因此该方案只能用以辅助驾驶,而不适用于自动驾驶。而相似专利(cn110737261a一种车辆的自动停靠站控制方法及系统)中描述的是基于单车智能的路径规划系统,并没有涉及到车路协同和高精度图,存在一定的局限,且停靠精度达不到厘米级别,不方便特殊人群的上下车。
技术实现要素:
3.本发明的目的就是为了克服上述现有技术存在的缺陷而提供一种基于高精地图和路侧感知的brt自动停靠车站方法。
4.本发明的目的可以通过以下技术方案来实现:
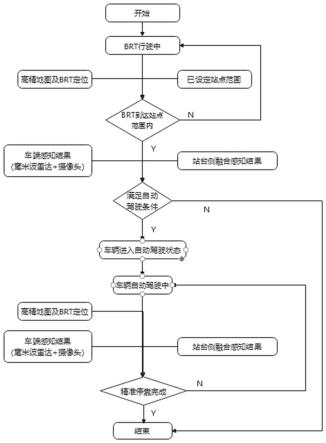
5.一种基于高精地图和路侧感知的brt自动停靠车站方法,该方法包括以下步骤:
6.步骤1:当brt在道路上行驶时,通过高精地图和brt定位技术判断brt是否到达设定的站点范围内,若是,则执行步骤3,若否,则返回步骤1;
7.步骤2:判断是否满足自动驾驶的安全条件,若是,则brt进入自动驾驶阶段;
8.步骤3:brt在自动驾驶中基于高精地图和brt定位技术根据感知结果到达停车地点;
9.步骤4:判断brt是否完成精准停靠,若是,则完成自动停靠车站进程,若否,则返回步骤2。
10.所述的步骤2中,自动驾驶的安全条件包括:
11.车端的感知设备未探测到必须绕行的障碍物或路面问题;
12.车站端的感知设备未探测到危险因素。
13.所述的必须绕行的障碍物包括在公交车道上行走的行人、电瓶车、树枝和石头。
14.所述的路面问题具体为车辆前方的窨井盖丢失。
15.所述的危险因素包括站在站台下的乘客、树枝和石头。
16.所述的步骤3中,所述的感知结果包括车端感知结果和车站端融合感知结果。
17.所述的车端感知结果具体为:
18.车端的毫米波雷达未检测到公交车前方有障碍物或路面问题,车载摄像头画面经过人工智能分析后,也未检测到障碍物或路面问题。
19.所述的车站端融合感知结果具体为:
20.毫米波雷达和摄像头的数据进行融合计算之后,公交车的车道处于正常状态。
21.所述的步骤4中,基于高精地图和brt定位技术根据感知结果到达停车地点的过程具体为:
22.brt在自动驾驶进站过程中基于高精度地图定位和毫米波雷达的感知技术实现厘米级别停靠,在brt刚进站进入自动驾驶的时候,此时距离车站远,brt通过高精度地图导航驶入车站,当汽车靠近车站时,通过brt侧边的毫米波雷达精确判断停靠距离为厘米级的安全停靠距离,且brt的纵向距离全程根据高精度地图进行调整,并结合车站端融合感知结果和车端感知结果判断是否满足设定的安全条件,以确保行驶安全。
23.所述的步骤5中,根据gps定位判断brt的实际定位信息和预先设定好的目标位置是否一致,若是,则认为brt完成精准停靠站台。
24.与现有技术相比,本发明具有以如下有益效果:
25.1、本发明通过将安全精准停靠的距离控制在10cm之内,能够使得用轮椅的乘客顺利上下车,同时防止因为缝隙过大导致乘客不小心摔倒的情况,提升上下车的安全,且能够避免车辆停靠距离过远且在马路两侧有积水时,乘客踩在水里上下车的情况,更加人性化,提高乘客的出行体验感;
26.2、本发明能够减轻司机的工作量,防止司机驾驶疲劳;
27.3、本发明通过车站端的融合感知系统,使得快速公交进站具备超视距感知的能力,有效避免在视觉盲区行人突然窜出而导致危险发生的情况,进而提高交通安全性。
附图说明
28.图1为本发明的方法流程图。
29.图2为本发明中根据gps定位判断brt是否完成精准停靠的示意图。
30.图3为现有的厦门brt停靠站辅助系统的方案结构示意图。
具体实施方式
31.下面结合附图和具体实施例对本发明进行详细说明。本实施例以本发明技术方案为前提进行实施,给出了详细的实施方式和具体的操作过程,但本发明的保护范围不限于下述的实施例。
32.本发明提供了一种基于高精地图和路侧感知的brt自动停靠车站方法,通过高精地图和定位技术,确认公交车的位置,然后通过车站端和车端的感知结果,确保公交车能够安全的到达停车地点,该方法包括以下步骤:
33.步骤1:brt在道路上行驶;
34.步骤2:通过高精地图和brt定位技术判断brt是否到达设定的站点范围内,若是,则执行步骤3,若否,则返回步骤1;
35.步骤3:判断是否满足自动驾驶的安全条件,若是,则brt进入自动驾驶阶段;
36.步骤4:brt在自动驾驶中基于高精地图和brt定位技术根据感知结果到达停车地点;
37.步骤5:判断brt是否完成精准停靠,若是,则完成自动停靠车站进程,若否,则返回步骤3。
38.本发明通过车路协同和公交车自身的单车智能,使得公交车自动精准的停靠站,一方面精准停靠能够方便特殊人群上下车,另一方面也能够减轻公交司机的工作负荷,提高安全性。
39.brt(快速公交系统bus rapid transit)是一种介于快速轨道交通与常规公交之间的新型公共客运系统,其投资及运营成本比轨道交通低,而运营效果接近于轨道交通。brt主要由以下七个组成部分:专用行车道、车站与枢纽、特色车辆、线路、收费系统、智能交通系统和服务,形成了完整的方便乘客以及提高实效的快速公交系统。
40.如图2所示,根据gps定位判断brt是否完成精准停靠,虚线框代表车辆的目标位置,实线框代表车辆的当前位置。实线框内的点是定位好的坐标点,虚线框内的点是当车辆停在目标位置之后的定位坐标点,当两个点重合(即车辆的实际定位信息和预先设定好的目标位置一致),认为车辆停靠完成。
41.基于高精度地图定位和毫米波雷达的感知实现厘米级别停靠的过程具体为:
42.在brt刚进站进入自动驾驶的时候,此时距离站点较远(例如:大于等于15m),通过高精度地图来导航汽车驶入车站(因为距离较远,高精地图带来的误差可以忽略不计),因为高精度的定位精度根据车站到实际rtk基站的距离不同,精度差别也不同,目前最多精确到厘米级别,因此当汽车靠近车站时(例如小于15m),通过brt侧边的毫米波雷达精确判断停靠距离为10cm左右,brt的纵向距离的调整(纵向距离为前后距离,即图2所示的两点是否重合)全程只需要通过高精度地图调整,因为可以接受前后距离的误差在10cm左右。
43.实现厘米级别的停靠需要同时用到包括高精度地图定位和毫米波雷达的感知这两项技术,具体实现过程为:
44.在brt刚进站进入自动驾驶的时候,此时距离车站较远(例如:大于等于15m),通过高精度地图来导航汽车驶入车站(因为距离较远,高精地图带来的误差可以忽略不计);
45.因为高精度地图的定位精度根据车站到实际rtk基站的距离不同,精度差别也不同,目前最多到精确到厘米级别,因此当汽车靠近车站时候(例如小于15m),通过brt侧边的毫米波雷达精确判断停靠距离为10cm的安全停靠距离;
46.brt的纵向距离(纵向距离为前后距离,即图2所示的两点是否重合)全程通过高精度地图进行调节,因为前后距离的误差在10cm左右是能够接受的。
47.以上详细描述了本发明的较佳具体实施例。应当理解,本领域的普通技术人员无需创造性劳动就可以根据本发明的构思作出诸多修改和变化。因此,凡本技术领域中技术人员依本发明的构思在现有技术的基础上通过逻辑分析、推理或者有限的实验可以得到的技术方案,皆应在由权利要求书所确定的保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
