1.本发明涉及无线传输技术领域,具体涉及一种无线传输全景环视拼接技术。
背景技术:
2.随着时代的发展和科技的进步,生活水平逐渐提高,对车的需求量也逐渐增大,在安全装备的需求上也逐渐重视了起来,大型货车和客车,因为盲区更大,更加需要解决a柱及周边盲区问题。传统左右后视镜,普遍存在视野范围小,视线盲区大,雨雪天气容易模糊,和夜视效果不好等问题。因此,亟需一种具有低时延、高可靠、精同步、多并发、高速率、高安全获得全景环视视频的方法。
技术实现要素:
3.本发明提供一种无线传输全景环视拼接技术,以解决现有技术中存在的上述问题。
4.本发明提供一种无线传输全景环视拼接技术,包括:
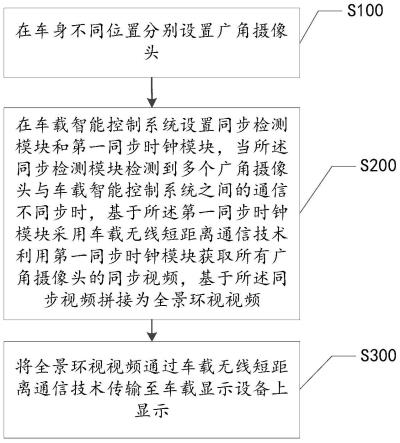
5.s100,在车身不同位置分别设置广角摄像头;
6.s200,在车载智能控制系统设置同步检测模块和第一同步时钟模块,当所述同步检测模块检测到多个广角摄像头与车载智能控制系统之间的通信不同步时,基于所述第一同步时钟模块采用车载无线短距离通信技术获取所有广角摄像头的同步视频,基于所述同步视频拼接为全景环视视频;
7.s300,将全景环视视频通过车载无线短距离通信技术传输至车载显示设备上显示。
8.优选的,所述s100包括:
9.s101,所述车身为拖挂车的车身,在拖挂车的左右后视镜位置设置左后视镜的高速高清流媒体摄像头和右后视镜的高速高清流媒体摄像头;
10.s102,在拖挂车的前后分别设置前侧广角摄像头和后侧广角摄像头;
11.s103,在拖挂车的两侧设置至少两个广角摄像头。
12.优选的,所述s200包括:
13.s201,在所有广角摄像头中设置有车载无线短距离通信第一发送端口;
14.s202,在所述车载智能控制系统中设置视频处理模块、车载无线短距离通信第一接收端口和车载无线短距离通信第二发送端口,车载无线短距离通信第一接收端口用于接收广角摄像头的同步视频,并将所述同步视频传输至所述视频处理模块,所述视频处理模块将获取到的所有广角摄像头的同步视频进行视频拼接处理,形成全景环视视频,所述全景环视视频经过所述车载无线短距离通信第二发送端口向外发送。
15.优选的,所述s300包括:
16.s301,所述车载显示设备设置有车载无线短距离通信第二接收端口,用于接收所述视频处理模块发送的全景环视视频;
17.s302,将所述车载显示设备的显示屏划分为两个区域,一个区域展示左或右后视镜的高速高清流媒体摄像头拍摄的电子后视镜视频,另一个区域展示所述全景环视视频。
18.优选的,所述s100还包括:在每个广角摄像头中设置第二同步时钟模块;
19.相应的,s200还包括:
20.s203,所述第一同步时钟模块向外广播时间信息,同时发送反馈指令,要求各个第二同步时钟模块向第一同步时钟模块反馈接收到反馈指令的信息;
21.s204,所有第二同步时钟模块基于所述时间信息校正每个广角摄像头的时间,同时,在接收到反馈指令后,向所述第一同步时钟模块发送接收到指令这一信息;
22.s205,所述第一同步时钟模块根据接收到的各个第二同步时钟模块反馈的信息的时间,调整各个第二同步时钟模块的传输时间差;
23.s206,基于所述传输时间差调整接收的每个广角摄像头的视频的时间序列,形成同步视频。
24.优选的,所述车载无线短距离通信技术是按照中国通信标准化协会制定的通信协议要求设定的通信带宽。
25.优选的,所述s200还包括:
26.s207,在车载智能控制系统中设置5g通信模块,相应的,在广角摄像头和车载显示设备上均设置5g通信模块;
27.s208,所述车载智能控制系统对车载无线短距离通信技术的通信质量,进行定时监控,按照预设的间隔时间定时进行监控;一旦定时监控时检测到通信质量低于预设值,则将车载智能控制系统的通信方式切换至采用5g通信模块的无线移动通信方式;若在预设时间段内每次定时监控时通信质量均高于预设值,则所述车载智能控制系统自动调整定时监控的间隔时间,将间隔时间设定值增大;一旦再次检测通信质量低于预设值,重新将间隔时间调整为原来的间隔时间。
28.优选的,所述s100之后,包括:
29.s400,在每个广角摄像头上设置有检测装置,所述检测装置用于检测广角摄像头的是否处于正常工作状态;
30.s500,若某一广角摄像头处于非正常工作状态,则通过车载无线短距离通信技术向车载智能控制系统发送警报,所述车载智能控制系统通过警报装置提醒驾驶者更换相应的广角摄像头或通过所述车载智能控制系统调整该广角摄像头的内外参数,以保证该广角摄像头处于正常工作状态。
31.优选的,所述s300之后,包括:
32.s600,所述车载智能控制系统将所有同步视频以及全景环视视频传输至云端服务器,将所述同步视频与全景环视视频按照时间对应关系存储于云数据库中;通过调用某个时间段的全景环视视频,获得与该全景环视视频对应的同步视频,该调用的全景环视视频和同步视频用于处理事故纠纷时的判断依据;
33.在存储时,在所述同步视频上标注有开始时间、结束时间、时长、拍摄视角、拼接位置;所述拼接位置是该同步视频拼接于全景环视视频的位置。
34.优选的,所述基于所述同步视频拼接为全景环视视频,包括:
35.将所有同步视频中需要剪切的部分进行预处理,获得剪切视频的若干个顶点,根
据若干个顶点形成多边形,构成剪切多边形,基于所述剪切多边形形成畸形矫正转换矩阵;
36.基于所述畸形矫正转换矩阵形成同步视频与全景环视视频的映射关系;
37.检测出位置相邻的两个同步视频中的参照物;
38.基于所述参照物构建相邻的两个同步视频与全景环视视频的偏差映射表;所述偏差映射表包括参照物尺寸偏差和参照物角度偏差;
39.基于所述映射关系和所述偏差映射表,将所述同步视频构建为全景环视视频。
40.优选的,还包括视频筛选单元,用于采用下述方式对全景环视视频的拼接过程中的当前视频集中所有视频进行筛选:
41.步骤一:设置相似度阈值,通过该阈值判断两个视频之间的重叠区域是否过高;
42.步骤二:获得当前视频集中相似度最大的两个视频,分别为视频a和视频b,判断这两个视频的相似度至是否大于相似度阈值,如果大于,则代表视频集中存在重叠区域过高的局部区域,进入步骤三;否则说明视频集中所有相邻视频间没有过高的重叠区域;停止筛选,输出当前视频集;
43.步骤三:根据下述公式分析视频a和视频b与公共临界视频的相似度关系,根据分析结果将其中一个视频判定为冗余视频并移除当前视频集:
[0044][0045]
其中,t为视频a和视频b与公共临界图像的相似度值;a为视频a,b为视频b;p∈(a,b),其中视频a和视频b为当前视频集中相似度最大的两个视频;s(i,j)为视频i和视频j之间的相似度,n为公共临界视频的个数;s(i,p)为视频i与视频p之间的相似度,s(p,j)为视频p与视频j之间的相似度,视频i和视频j属于当前视频集。
[0046]
将t值大的对应的视频作为冗余视频进行移除,通过该方式提升删选效率。
[0047]
步骤四:更新当前视频集的相似度矩阵;并转入步骤二,再次重新获得视频集中相似度最大的两个视频a*和b*;并重复步骤三和步骤四。
[0048]
与现有技术相比,本发明具有以下优点:
[0049]
本发明提供一种无线传输全景环视拼接技术,包括:在车身不同位置分别设置广角摄像头;在车载智能控制系统设置第一同步时钟模块,基于车载无线短距离通信技术利用第一同步时钟模块获取所有广角摄像头的同步视频,基于所述同步视频拼接为全景环视视频;将全景环视视频通过车载无线短距离通信技术传输至车载显示设备上显示。本方案不但可以实现电子后视镜的全方位无盲区的设置,还可以通过无线传输方式实现低时延、高可靠、精同步、多并发、高速率、高安全的视频传输,保障时间同步,提升全景环视视频质量。
[0050]
本发明的其它特征和优点将在随后的说明书中阐述,并且,部分地从说明书中变得显而易见,或者通过实施本发明而了解。本发明的目的和其他优点可通过在所写的说明书、权利要求书、以及附图中所特别指出的结构来实现和获得。
[0051]
下面通过附图和实施例,对本发明的技术方案做进一步的详细描述。
附图说明
[0052]
附图用来提供对本发明的进一步理解,并且构成说明书的一部分,与本发明的实施例一起用于解释本发明,并不构成对本发明的限制。在附图中:
[0053]
图1为本发明实施例中一种无线传输全景环视拼接技术的流程图;
[0054]
图2为本发明实施例中在车身不同位置分别设置广角摄像头的方法流程图;
[0055]
图3为本发明实施例中基于车载无线短距离通信技术利用第一同步时钟模块获取所有广角摄像头的同步视频的方法流程图。
具体实施方式
[0056]
以下结合附图对本发明的优选实施例进行说明,应当理解,此处所描述的优选实施例仅用于说明和解释本发明,并不用于限定本发明。
[0057]
本发明实施例提供了一种无线传输全景环视拼接技术,请参照图1,该技术保护以下几个步骤:
[0058]
s100,在车身不同位置分别设置广角摄像头;
[0059]
s200,在车载智能控制系统设置同步检测模块和第一同步时钟模块,当所述同步检测模块检测到多个广角摄像头与车载智能控制系统之间的通信不同步时,基于所述第一同步时钟模块采用车载无线短距离通信技术获取所有广角摄像头的同步视频,基于所述同步视频拼接为全景环视视频;
[0060]
s300,将全景环视视频通过车载无线短距离通信技术传输至车载显示设备上显示。
[0061]
上述技术方案的工作原理为:本实施例采用的方案是在车身不同位置分别设置广角摄像头;在车载智能控制系统设置第一同步时钟模块以及同步检测模块,通过同步检测模块检测各个广角摄像头传输的视频是否是同步的,若不同步,则通过第一同步时钟模块调整各个广角摄像头传输的视频以使所有视频保持同步状态,形成同步视频,因此,基于车载无线短距离通信技术利用第一同步时钟模块获取所有广角摄像头的同步视频,基于所述同步视频拼接为全景环视视频;将全景环视视频通过车载无线短距离通信技术传输至车载显示设备上显示。通过对同步视频的拼接形成全景环视视频,保证该全景环视视频更接近真实的现场情况,若某个广角摄像头的视频有延迟,拼接后的全景环视视频必然不能完全代表真实场景,因此,通过同步检测模块以及第一同步时钟模块保证形成同步视频。
[0062]
上述技术方案的有益效果为:采用本实施例提供的方案在车身不同位置分别设置广角摄像头;在车载智能控制系统设置第一同步时钟模块,基于车载无线短距离通信技术利用第一同步时钟模块获取所有广角摄像头的同步视频,基于所述同步视频拼接为全景环视视频;将全景环视视频通过车载无线短距离通信技术传输至车载显示设备上显示。本方案不但可以实现电子后视镜的全方位无盲区的设置,还可以通过无线传输方式实现低时延、高可靠、精同步、多并发、高速率、高安全的视频传输,保障时间同步,提升全景环视视频质量。
[0063]
在另一实施例中,请参照图2,所述s100包括:
[0064]
s101,所述车身为拖挂车的车身,在拖挂车的左右后视镜位置设置左后视镜的高速高清流媒体摄像头和右后视镜的高速高清流媒体摄像头;
[0065]
s102,在拖挂车的前后分别设置前侧广角摄像头和后侧广角摄像头;
[0066]
s103,在拖挂车的两侧设置至少两个广角摄像头。
[0067]
上述技术方案的工作原理为:本实施例采用的方案是所述车身为拖挂车的车身,在拖挂车的左右后视镜位置设置左后视镜的高速高清流媒体摄像头和右后视镜的高速高清流媒体摄像头;在拖挂车的前后分别设置前侧广角摄像头和后侧广角摄像头;在拖挂车的两侧设置至少两个广角摄像头。
[0068]
上述技术方案的有益效果为:采用本实施例提供的方案所述车身为拖挂车的车身,在拖挂车的左右后视镜位置设置左后视镜的高速高清流媒体摄像头和右后视镜的高速高清流媒体摄像头;在拖挂车的前后分别设置前侧广角摄像头和后侧广角摄像头;在拖挂车的两侧设置至少两个广角摄像头。本方案不但可以实现电子后视镜的全方位无盲区的设置,还可以通过无线传输方式实现低时延、高可靠、精同步、多并发、高速率、高安全的视频传输,保障时间同步,提升全景环视视频质量。
[0069]
在另一实施例中,所述s200包括:
[0070]
s201,在所有广角摄像头中设置有车载无线短距离通信第一发送端口;
[0071]
s202,在所述车载智能控制系统中设置视频处理模块、车载无线短距离通信第一接收端口和车载无线短距离通信第二发送端口,车载无线短距离通信第一接收端口用于接收广角摄像头的同步视频,并将所述同步视频传输至所述视频处理模块,所述视频处理模块将获取到的所有广角摄像头的同步视频进行视频拼接处理,形成全景环视视频,所述全景环视视频经过所述车载无线短距离通信第二发送端口向外发送。
[0072]
上述技术方案的工作原理为:本实施例采用的方案是在所有广角摄像头中设置有车载无线短距离通信第一发送端口;在所述车载智能控制系统中设置视频处理模块、车载无线短距离通信第一接收端口和车载无线短距离通信第二发送端口,车载无线短距离通信第一接收端口用于接收广角摄像头的同步视频,并将所述同步视频传输至所述视频处理模块,所述视频处理模块将获取到的所有广角摄像头的同步视频进行视频拼接处理,形成全景环视视频,所述全景环视视频经过所述车载无线短距离通信第二发送端口向外发送。
[0073]
上述技术方案的有益效果为:采用本实施例提供的方案在所有广角摄像头中设置有车载无线短距离通信第一发送端口;在所述车载智能控制系统中设置视频处理模块、车载无线短距离通信第一接收端口和车载无线短距离通信第二发送端口,车载无线短距离通信第一接收端口用于接收广角摄像头的同步视频,并将所述同步视频传输至所述视频处理模块,所述视频处理模块将获取到的所有广角摄像头的同步视频进行视频拼接处理,形成全景环视视频,所述全景环视视频经过所述车载无线短距离通信第二发送端口向外发送。本方案不但可以实现电子后视镜的全方位无盲区的设置,还可以通过无线传输方式实现低时延、高可靠、精同步、多并发、高速率、高安全的视频传输,保障时间同步,提升全景环视视频质量。
[0074]
在另一实施例中,所述s300包括:
[0075]
s301,所述车载显示设备设置有车载无线短距离通信第二接收端口,用于接收所述视频处理模块发送的全景环视视频;
[0076]
s302,将所述车载显示设备的显示屏划分为两个区域,一个区域展示左或右后视镜的高速高清流媒体摄像头拍摄的电子后视镜视频,另一个区域展示所述全景环视视频。
[0077]
上述技术方案的工作原理为:本实施例采用的方案是所述车载显示设备设置有车载无线短距离通信第二接收端口,用于接收所述视频处理模块发送的全景环视视频;将所述车载显示设备的显示屏划分为两个区域,一个区域展示左或右后视镜的高速高清流媒体摄像头拍摄的电子后视镜视频,另一个区域展示所述全景环视视频。
[0078]
上述技术方案的有益效果为:采用本实施例提供的方案所述车载显示设备设置有车载无线短距离通信第二接收端口,用于接收所述视频处理模块发送的全景环视视频;将所述车载显示设备的显示屏划分为两个区域,一个区域展示左或右后视镜的高速高清流媒体摄像头拍摄的电子后视镜视频,另一个区域展示所述全景环视视频。适应驾驶者的驾驶习惯,并且可以实现电子后视镜的全方位无盲区的设置,还可以通过无线传输方式实现低时延、高可靠、精同步、多并发、高速率、高安全的视频传输,保障时间同步,提升全景环视视频质量。
[0079]
在另一实施例中,请参照图3,所述s100还包括:在每个广角摄像头中设置第二同步时钟模块;
[0080]
相应的,s200还包括:
[0081]
s203,所述第一同步时钟模块向外广播时间信息,同时发送反馈指令,要求各个第二同步时钟模块向第一同步时钟模块反馈接收到反馈指令的信息;
[0082]
s204,所有第二同步时钟模块基于所述时间信息校正每个广角摄像头的时间,同时,在接收到反馈指令后,向所述第一同步时钟模块发送接收到指令这一信息;
[0083]
s205,所述第一同步时钟模块根据接收到的各个第二同步时钟模块反馈的信息的时间,调整各个第二同步时钟模块的传输时间差;
[0084]
s206,基于所述传输时间差调整接收的每个广角摄像头的视频的时间序列,形成同步视频。
[0085]
上述技术方案的工作原理为:本实施例采用的方案是在每个广角摄像头中设置第二同步时钟模块;相应的,所述第一同步时钟模块向外广播时间信息,同时发送反馈指令,要求各个第二同步时钟模块向第一同步时钟模块反馈接收到反馈指令的信息;所有第二同步时钟模块基于所述时间信息校正每个广角摄像头的时间,同时,在接收到反馈指令后,向所述第一同步时钟模块发送接收到指令这一信息;所述第一同步时钟模块根据接收到的各个第二同步时钟模块反馈的信息的时间,调整各个第二同步时钟模块的传输时间差;基于所述传输时间差调整接收的每个广角摄像头的视频的时间序列,形成同步视频。
[0086]
上述技术方案的有益效果为:采用本实施例提供的方案在所述广角摄像头中设置第二同步时钟模块;相应的,所述第一同步时钟模块向外广播时间信息,同时发送反馈指令,要求各个第二同步时钟模块向第一同步时钟模块反馈接收到反馈指令的信息;所有第二同步时钟模块基于所述时间信息校正每个广角摄像头的时间,同时,在接收到反馈指令后,向所述第一同步时钟模块发送接收到指令这一信息;所述第一同步时钟模块根据接收到的各个第二同步时钟模块反馈的信息的时间,调整各个第二同步时钟模块的传输时间差;基于所述传输时间差调整接收的每个广角摄像头的视频的时间序列,形成同步视频。本方案不但可以实现电子后视镜的全方位无盲区的设置,还可以通过无线传输方式实现低时延、高可靠、精同步、多并发、高速率、高安全的视频传输,保障时间同步,提升全景环视视频质量。
[0087]
在另一实施例中,所述车载无线短距离通信技术是按照中国通信标准化协会制定的通信协议要求设定的通信带宽。
[0088]
上述技术方案的工作原理为:本实施例采用的方案是所述车载无线短距离通信技术是按照中国通信标准化协会制定的通信协议要求设定的通信带宽。
[0089]
上述技术方案的有益效果为:采用本实施例提供的方案所述车载无线短距离通信技术是按照中国通信标准化协会制定的通信协议要求设定的通信带宽。本方案不但可以实现电子后视镜的全方位无盲区的设置,还可以通过无线传输方式实现低时延、高可靠、精同步、多并发、高速率、高安全的视频传输,保障时间同步,提升全景环视视频质量。
[0090]
在另一实施例中,所述s200还包括:
[0091]
s207,在车载智能控制系统中设置5g通信模块,相应的,在广角摄像头和车载显示设备上均设置5g通信模块;
[0092]
s208,所述车载智能控制系统对车载无线短距离通信技术的通信质量,进行定时监控,按照预设的间隔时间定时进行监控;一旦定时监控时检测到通信质量低于预设值,则将车载智能控制系统的通信方式切换至采用5g通信模块的无线移动通信方式;若在预设时间段内每次定时监控时通信质量均高于预设值,则所述车载智能控制系统自动调整定时监控的间隔时间,将间隔时间设定值增大;一旦再次检测通信质量低于预设值,重新将间隔时间调整为原来的间隔时间。
[0093]
上述技术方案的工作原理为:本实施例采用的方案是在车载智能控制系统中设置5g通信模块,相应的,在广角摄像头和车载显示设备上均设置5g通信模块;所述车载智能控制系统检测车载无线短距离通信技术的通信质量,若通信质量低于预设值,则将车载智能控制系统的通信方式切换至采用5g通信模块的无线移动通信方式。通过设定间隔时间对通信质量进行定时监控,而不是实时监控,在实际应用中可能会遇到信号质量短暂波动造成通信方式切换的情况,这种情况下,若直接切换通信方式反而影响通信质量,造成视频传输延迟的问题,而通过设定间隔时间,每间隔一段时间进行检测一次,一方面实现对通信质量的定时检测,保证通信质量处于较优的状态,另一方面也避免可能出现频繁切换的状况。当一定时间后(该时间远远大于间隔时间),发现通信质量一直处于超过预设值的状态,则可以认定通信质量很好,可以暂时调整间隔时间,使间隔时间变长,即两次检测时间拉长,但一旦再次检测到通信质量低于预设值,则重新将间隔时间调整到原始设定的值,以上述方式重复调整间隔时间,该间隔时间是通过车载智能控制系统自动调整的。
[0094]
上述技术方案的有益效果为:采用本实施例提供的方案在车载智能控制系统中设置5g通信模块,相应的,在广角摄像头和车载显示设备上均设置5g通信模块;所述车载智能控制系统检测车载无线短距离通信技术的通信质量,若通信质量低于预设值,则将车载智能控制系统的通信方式切换至采用5g通信模块的无线移动通信方式。本方案不但可以实现电子后视镜的全方位无盲区的设置,还可以通过无线传输方式实现低时延、高可靠、精同步、多并发、高速率、高安全的视频传输,保障时间同步,提升全景环视视频质量。
[0095]
在另一实施例中,所述s100之后,包括:
[0096]
s400,在每个广角摄像头上设置有检测装置,所述检测装置用于检测广角摄像头的是否处于正常工作状态;
[0097]
s500,若某一广角摄像头处于非正常工作状态,则通过车载无线短距离通信技术
向车载智能控制系统发送警报,所述车载智能控制系统通过警报装置提醒驾驶者更换相应的广角摄像头或通过所述车载智能控制系统调整该广角摄像头的内外参数,以保证该广角摄像头处于正常工作状态。
[0098]
上述技术方案的工作原理为:本实施例采用的方案是在每个广角摄像头上设置有检测装置,所述检测装置用于检测广角摄像头的是否处于正常工作状态;若某一广角摄像头处于非正常工作状态,则通过车载无线短距离通信技术向车载智能控制系统发送警报,所述车载智能控制系统通过警报装置提醒驾驶者更换相应的广角摄像头或通过所述车载智能控制系统调整该广角摄像头的内外参数,以保证该广角摄像头处于正常工作状态。
[0099]
上述技术方案的有益效果为:采用本实施例提供的方案在每个广角摄像头上设置有检测装置,所述检测装置用于检测广角摄像头的是否处于正常工作状态;若某一广角摄像头处于非正常工作状态,则通过车载无线短距离通信技术向车载智能控制系统发送警报,所述车载智能控制系统通过警报装置提醒驾驶者更换相应的广角摄像头。本方案不但可以实现电子后视镜的全方位无盲区的设置,还可以通过无线传输方式实现低时延、高可靠、精同步、多并发、高速率、高安全的视频传输,保障时间同步,提升全景环视视频质量。
[0100]
在另一实施例中,所述s300之后,包括:
[0101]
s600,所述车载智能控制系统将所有同步视频以及全景环视视频传输至云端服务器,将所述同步视频与全景环视视频按照时间对应关系存储于云数据库中;通过调用某个时间段的全景环视视频,获得与该全景环视视频对应的同步视频,该调用的全景环视视频和同步视频用于处理事故纠纷时的判断依据;
[0102]
在存储时,在所述同步视频上标注有开始时间、结束时间、时长、拍摄视角、拼接位置;所述拼接位置是该同步视频拼接于全景环视视频的位置。
[0103]
上述技术方案的工作原理为:本实施例采用的方案是所述车载智能控制系统将所有同步视频以及全景环视视频传输至云端服务器,将所述同步视频与全景环视视频按照时间对应关系存储于云数据库中;通过调用某个时间段的全景环视视频,获得与该全景环视视频对应的同步视频,该调用的全景环视视频和同步视频用于处理事故纠纷时的判断依据;在存储时,在所述同步视频上标注有开始时间、结束时间、时长、拍摄视角、拼接位置;所述拼接位置是该同步视频拼接于全景环视视频的位置。方便根据同步视频上标注的内容更好的找到需要的视频
[0104]
上述技术方案的有益效果为:采用本实施例提供的方案所述车载智能控制系统将所有同步视频以及全景环视视频传输至云端服务器,将所述同步视频与全景环视视频按照时间对应关系存储于云数据库中;通过调用某个时间段的全景环视视频,获得与该全景环视视频对应的同步视频,该调用的全景环视视频和同步视频用于处理事故纠纷时的判断依据。本方案不但可以实现电子后视镜的全方位无盲区的设置,还可以通过无线传输方式实现低时延、高可靠、精同步、多并发、高速率、高安全的视频传输,保障时间同步,提升全景环视视频质量。
[0105]
在另一实施例中,所述基于所述同步视频拼接为全景环视视频,包括:
[0106]
将所有同步视频中需要剪切的部分进行预处理,获得剪切视频的若干个顶点,根据若干个顶点形成多边形,构成剪切多边形,基于所述剪切多边形形成畸形矫正转换矩阵;
[0107]
基于所述畸形矫正转换矩阵形成同步视频与全景环视视频的映射关系;
[0108]
检测出位置相邻的两个同步视频中的参照物;
[0109]
基于所述参照物构建相邻的两个同步视频与全景环视视频的偏差映射表;所述偏差映射表包括参照物尺寸偏差和参照物角度偏差;
[0110]
基于所述映射关系和所述偏差映射表,将所述同步视频构建为全景环视视频。
[0111]
上述技术方案的工作原理为:本实施例采用的方案是所述基于所述同步视频拼接为全景环视视频,包括:将所有同步视频中需要剪切的部分进行预处理,获得剪切视频的若干个顶点,根据若干个顶点形成多边形,构成剪切多边形,基于所述剪切多边形形成畸形矫正转换矩阵;基于所述畸形矫正转换矩阵形成同步视频与全景环视视频的映射关系;检测出位置相邻的两个同步视频中的参照物;基于所述参照物构建相邻的两个同步视频与全景环视视频的偏差映射表;所述偏差映射表包括参照物尺寸偏差和参照物角度偏差;基于所述映射关系和所述偏差映射表,将所述同步视频构建为全景环视视频。
[0112]
提升全景环视视频的质量,减少视频的畸变。
[0113]
上述技术方案的有益效果为:采用本实施例提供的方案所述基于所述同步视频拼接为全景环视视频,包括:将所有同步视频中需要剪切的部分进行预处理,获得剪切视频的若干个顶点,根据若干个顶点形成多边形,构成剪切多边形,基于所述剪切多边形形成畸形矫正转换矩阵;基于所述畸形矫正转换矩阵形成同步视频与全景环视视频的映射关系;检测出位置相邻的两个同步视频中的参照物;基于所述参照物构建相邻的两个同步视频与全景环视视频的偏差映射表;所述偏差映射表包括参照物尺寸偏差和参照物角度偏差;基于所述映射关系和所述偏差映射表,将所述同步视频构建为全景环视视频。本方案不但可以实现电子后视镜的全方位无盲区的设置,还可以通过无线传输方式实现低时延、高可靠、精同步、多并发、高速率、高安全的视频传输,保障时间同步,提升全景环视视频质量。
[0114]
显然,本领域的技术人员可以对本发明进行各种改动和变型而不脱离本发明的精神和范围。这样,倘若本发明的这些修改和变型属于本发明权利要求及其等同技术的范围之内,则本发明也意图包含这些改动和变型在内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。