1.本发明属于海洋渔业渔场自动预测技术领域,特别是涉及一种基于关注船和作业类型的公海渔场捕鱼位置自动识别和探测路线规划方法。
背景技术:
2.在渔场自动识别技术领域,大多数以海洋环境特征场和历史鱼捞日志数据建立渔场预报模型来进行中心渔场范围和位置预测,此种渔场捕鱼位置的判定往往呈现几十至几百海里的范围,区域过大导致无法去精准识别渔场,对生产船的实际指导意义偏小,难以满足当今快速识别渔场和渔业信息化的建设需要。由于公海渔业类型多样化,作业船只和作业方式也差异巨大,不同的渔场预测方法往往差别很大,渔场预测的指标体系也不尽相同,因此,如何根据当前船只的实际作业类型来自动识别周边的渔场环境场并建立自主渔场识别以及捕鱼探测路线规划方法,是该领域的新兴研究方向之一。
3.公海渔场由于资料较少,渔场识别难度较大,相关精细和精准化渔场预测指标体系和方法缺乏足够的信息,涉及计算机自动识别渔场更是没有相关报道。大多数情况下,渔民对于渔场的预测和探测路线规划没有资料可查,也很难掌握渔场形成的规律和背后的内在机制。本发明着眼于渔船的作业类型,采用必要的渔场预测方法指标建立计算机辅助识别渔场位置和探测路线方法,有助于方便、高效地解决公海渔场识别困难的难题。
技术实现要素:
4.本发明所要解决的技术问题是提供基于关注船和作业类型的公海渔场捕鱼位置自动识别和探测路线规划方法,能够归纳和总结捕鱼船的实时船位并通过计算机自动分析渔场的位置并建立参数体系,为中心渔场即时预测奠定基础。
5.本发明解决其技术问题所采用的技术方案是:
6.一种基于关注船和作业类型的公海渔场捕鱼位置自动识别和探测路线规划方法,
7.包括以下步骤:
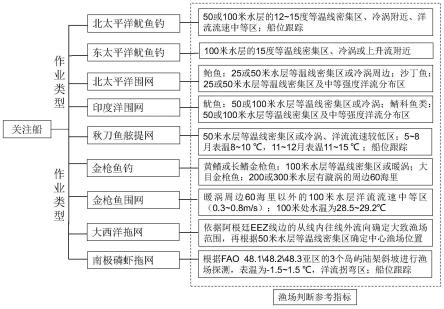
8.(a)根据任一公海渔船和作业类型,分别建立基于渔船的作业位置自动识别参数体系;所述不同公海渔场的识别参数体系不尽相同(见图1);
9.(b)所述公海渔场分为9个渔场;所述鱿鱼钓渔场识别参数为50或100米等温线密集区边缘或冷涡周边;所述北太平洋围网渔场识别参数为25或50米水层等温线密集区或冷涡周边(鲐鱼),25或50米水层等温线密集区及中等强度洋流分布区(沙丁鱼);所述印度洋围网渔场识别参数为50或100米水层等温线密集区或冷涡(鱿鱼),50或100米水层等温线密集区及中等强度洋流分布区(鲭科鱼类);
10.(c)所述秋刀鱼舷提网渔场识别参数为50米水层等温线密集区或冷涡、洋流流速较低区;所述渔场区5~8月表温范围为8~10℃,11~12月表温范围为11~15℃;所述关注船船位跟踪和轨迹分析有助于进一步缩小渔场范围;
11.(d)所述金枪鱼钓渔场识别参数为100米水层等温线密集区或暖涡(黄鳍或长鳍金枪鱼);200或300米水层有漩涡的周边60海里(大目金枪鱼);
12.(e)所述金枪鱼围网渔场识别参数为暖涡周边60海里以外的100米水层洋流流速中等区(0.3~0.8m/s)区域;所述100米处水温为28.5~29.2℃时产量较好;
13.(f)所述大西洋拖网渔场识别参数为依据阿根廷eez线边的从线内往线外流向确定大致渔场范围,再根据50米水层等温线密集区或舌头状区域确定中心渔场位置;
14.(g)所述南极磷虾拖网渔场识别参数为根据fao 48.1\48.2\48.3亚区的3个岛屿陆架斜坡进行渔场探测,表温范围为-1.5~1.5℃;所述洋流为拐弯区,流速较低为0.2~0.4m/s;所述船位跟踪和状态分析对于渔场识别非常有用;
15.(h)根据单个关注船周边100海里进行适宜渔场位置的计算机自动识别,并标注出每个适宜渔场和关注船的路径距离;所述关注船与适宜渔场1距离最近,为最佳渔场;所述适宜渔场一般为3个(见图2);
16.(i)关注船根据适宜渔场位置进行探测路线规划,首选赴适宜渔场1,然后赴适宜渔场2探测;若仍然未探测到渔,则赴适宜渔场3(见图2);
17.(j)所述根据任一渔场的多个关注船船位变动也可以识别渔场,可分为2种方法;所述方法一为当今天的多个关注船船位和昨天船位相比未发生明显变动,可判断此处为渔场;所述方法二为当今天的多个关注船船位均和昨天的船位相比发生了转移,且今天的船位位置同时也是公海渔场识别参数所符合的海况条件,可判断此处为渔场(见图3);
18.(k)经过上述的渔场位置自动识别和探测路线的规划设计,可实现渔场位置的精准识别,提高预测准确度15%以上,并缩短了渔船盲目探测时间10%以上;
19.作为优选实施例,所述步骤(a)中的公海渔场覆盖率可达90%;所述渔场预测指标主要参考水温密集区或水温线拐弯区、洋流具有涡旋或拐弯区;
20.作为优选实施例,所述步骤(b)中北太平洋鱿钓、北太平洋围网和印度洋围网渔场识别参数均不以表层水温和洋流作为判断依据;
21.作为优选实施例,所述步骤(c)中秋刀鱼舷提网渔场识别参数可以参考表层水温或洋流,也可以参考25米水层的水温或洋流;
22.作为优选实施例,所述步骤(d)中金枪鱼钓渔场识别参数首选漩涡周边,其次是100米水层等温线密集区;
23.作为优选实施例,所述步骤(e)中金枪鱼围网渔场识别参数不采用表层水温和洋流;
24.作为优选实施例,所述步骤(f)中大西洋拖网渔场识别参数主要是沿着阿根廷专属经济区线进行南北渔场预报,且每隔2~3天渔场会发生南北摆动;
25.作为优选实施例,所述步骤(g)中南极磷虾拖网渔场识别参数短期变动很小,主要存在月间变动。
26.作为优选实施例,所述步骤(h)和(i)中首先基于关注船的作业类型结合渔场识别参数建立计算机自动识别渔场位置,优选1~3个渔场;根据最近距离选定最适渔场首选探测。
27.作为优选实施例,所述步骤(j)中基于多个关注船船位变动和轨迹分析可判断渔场位置,若多个关注船船位发生聚集且此处海况条件也适合渔场形成则准确率可达9成以
上;所述每个渔场关注船最好是50~100个。
28.由于采用了上述的技术方案,本发明与现有技术相比,具有以下的优点和积极效果:
29.1、采用关注船的作业类型来多层次、多角度建立公海渔场的识别和预测指标参数,有助于真正的解决找鱼难的难题;
30.2、通过关注船周边100海里的渔场位置判别,优选合适的渔场进行探测,从而实现高效、有序地进行渔场探测和路线规划,起到高效生产的作用,降低盲目探测的时间和燃油成本。
附图说明
31.图1为本发明的基于单个关注船作业类型和渔场判断参考指标示意图。
32.图2为本发明的基于单个关注船的渔场自动识别和捕鱼路线规划流程示意图。
33.图3为本发明的任一渔场的多个关注船船位变动的渔场判断过程示意图。
具体实施方式
34.下面结合附图对本发明的实施例作详细说明:本实施例在以本发明技术方案为前提下进行实施,给出了详细的实施方式和具体的操作过程,但本发明的保护范围不限于下述的实施例。
35.一种基于关注船和作业类型的公海渔场捕鱼位置自动识别和探测路线规划方法,包括以下步骤:
36.(a)根据任一公海渔船和作业类型,分别建立基于渔船的作业位置自动识别参数体系;所述不同公海渔场的识别参数体系不尽相同(见图1);
37.(b)所述公海渔场分为9个渔场;所述鱿鱼钓渔场识别参数为50或100米等温线密集区边缘或冷涡周边;所述北太平洋围网渔场识别参数为25或50米水层等温线密集区或冷涡周边(鲐鱼),25或50米水层等温线密集区及中等强度洋流分布区(沙丁鱼);所述印度洋围网渔场识别参数为50或100米水层等温线密集区或冷涡(鱿鱼),50或100米水层等温线密集区及中等强度洋流分布区(鲭科鱼类);
38.(c)所述秋刀鱼舷提网渔场识别参数为50米水层等温线密集区或冷涡、洋流流速较低区;所述渔场区5~8月表温范围为8~10℃,11~12月表温范围为11~15℃;所述关注船船位跟踪和轨迹分析有助于进一步缩小渔场范围;
39.(d)所述金枪鱼钓渔场识别参数为100米水层等温线密集区或暖涡(黄鳍或长鳍金枪鱼);200或300米水层有漩涡的周边60海里(大目金枪鱼);
40.(e)所述金枪鱼围网渔场识别参数为暖涡周边60海里以外的100米水层洋流流速中等区(0.3~0.8m/s)区域;所述100米处水温为28.5~29.2℃时产量较好;
41.(f)所述大西洋拖网渔场识别参数为依据阿根廷eez线边的从线内往线外流向确定大致渔场范围,再根据50米水层等温线密集区或舌头状区域确定中心渔场位置;
42.(g)所述南极磷虾拖网渔场识别参数为根据fao 48.1\48.2\48.3亚区的3个岛屿陆架斜坡进行渔场探测,表温范围为-1.5~1.5℃;所述洋流为拐弯区,流速较低为0.2~0.4m/s;所述船位跟踪和状态分析对于渔场识别非常有用;
43.(h)根据单个关注船周边100海里进行适宜渔场位置的计算机自动识别,并标注出每个适宜渔场和关注船的路径距离;所述关注船与适宜渔场1距离最近,为最佳渔场;所述适宜渔场一般为3个(见图2);
44.(i)关注船根据适宜渔场位置进行探测路线规划,首选赴适宜渔场1,然后赴适宜渔场2探测;若仍然未探测到渔,则赴适宜渔场3(见图2);
45.(j)所述根据任一渔场的多个关注船船位变动也可以识别渔场,可分为2种方法;所述方法一为当今天的多个关注船船位和昨天船位相比未发生明显变动,可判断此处为渔场;所述方法二为当今天的多个关注船船位均和昨天的船位相比发生了转移,且今天的船位位置同时也是公海渔场识别参数所符合的海况条件,可判断此处为渔场(见图3);
46.(k)经过上述的渔场位置自动识别和探测路线的规划设计,可实现渔场位置的精准识别,提高预测准确度15%以上,并缩短了渔船盲目探测时间10%以上。
47.实施例:
48.在实际渔业生产中,生产船通常根据熟悉的周边渔船的产量信息相互打听,而根据海洋环境特别是水温图来自己判断渔船的船长并不多见。在公海渔场,由于卫星网络带宽的限制,很多渔船并不能像陆地上那样上互联网进行渔场海况信息查询,因此,渔业管理人员可根据本发明的基于关注船的作业位置自动识别和探测路线规划方法,每天优选合适渔场分布至船长端,具体步骤如下:
49.首先,每天查询公海渔场信息平台的水温、洋流、船位、海底深度等可视化信息图层,对每个关注船的作业类型进行渔场参数的识别和优选合适的渔场位置;见图1。
50.其次,当发现关注船处于合适渔场位置,且船位在昨天和今天未发生明显变动,可认为此处就是合适渔场,渔船可不转移渔场;若关注船昨天产量不佳,而其它关注船船位未发生变动,可转移至其它关注船船位位置;若其它关注船也发生了渔场转移且转移至合适渔场位置,可判断该处是新的渔场,本船可进行转移渔场;具体操作流程见图2和图3。
51.最后,企业管理人员或安装有船端渔场预测系统平台的船长可根据本发明预报的渔场位置告知捕鱼船,并进行渔场转移距离和下一步捕鱼安排进行规划,合理有效地实现渔场精准化预测,以期提高捕捞产量和生产利润。本发明适用于多个渔场的预测和探鱼路线规划,具有较高的普适性,已在大西洋拖网、秋刀鱼舷提网、北太平洋围网和金枪鱼钓等多个渔场的实际渔业生产中得到应用,具有较高的可靠性和认可度。
52.以上显示和描述了本发明的基本原理和主要特征和本发明的优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是说明本发明的原理,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内。本发明要求保护范围由所附的权利要求书及其等效物界定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。