基于高精度线激光3d相机的标定方法和三维重建方法
技术领域
1.本发明涉及3d相机标定和三维重建技术领域,尤其涉及一种基于高精度线激光3d相机的标定方法和三维重建方法。
背景技术:
2.高精度线激光3d相机的标定与三维重建方法可以用于制造业的多个领域与多种工艺,适用领域有金属加工、家具制造、医学研究等行业,应用范围广。三维重建技术按相机数量可以分为单目相机视觉法、双目相机视觉法和多目相机视觉法,按照光源性质可以分为主动视觉法和被动视觉法。而对于相机标定的方法,可以根据空间维度分为零维自标定、一维标定、二维标定和三维标定方法,三维标定中采用球体靶标、多面立体靶标和虚拟立体靶标;二维标定中采用letraset速刻图板、棋盘格图案和格雷码图案等;一维标定法采用一维标定杆。
3.目前所有的光学相机镜头都存在畸变问题,畸变属于成像过程的几何失真,它是由于镜头焦平面上不同区域对影像的放大倍率不同而形成的图像扭曲变形现象,这种变形的程度从图像中心至图像边缘逐渐递增,尤其在图像边缘变形更加明显。
4.目前线结构光标定常用的技术主要包括:由huynh和徐光祐分别提出的利用交比不变性原理获取光平面标定点的标定方法;由刘震提出的联立光平面上光条的pl
ü
cker矩阵求解光平面的方程的标定方法。二者所需靶标参照物较为简单,通常为棋盘靶标,并且具有成本低、精度高的优点。然而,基于交比不变性原理的标定方法需要将线结构光投射的光条与棋盘靶标上的棋盘相交,不利于提取棋盘角点和光条中心点,同时提取的特征点较少。而求解光平面pl
ü
cker矩阵的标定方法需要联立3个平面方程计算光平面上多个光条的pl
ü
cker矩阵,计算较为复杂。
5.三维重建技术中,多个相机的成本相比于一个相机来说会提升许多,并且在标定过程中不同相机之间的坐标系转换与实际空间三维坐标系的确定会涉及到更多的考虑因素,结构复杂,标定难度大效率低,安装与维护成本也会更高。对于标定方法,三维立体靶标制作困难,标定设备成本较高;二维标定中的letraset速刻图板和棋盘格图案属于像素级图案,标定精度低;一维标定目标不够灵活,不同场景适用性弱;零维自标定法的数学运算复杂,精度不高。
技术实现要素:
6.本发明提供一种基于高精度线激光3d相机的标定和三维重建方法,降低了标定操作难度,提高了标定精度。
7.本发明一实施例提供一种基于高精度线激光3d相机的标定和三维重建方法,标定过程中面扫描相机和激光投影仪的固定在型材上,且所述面扫描相机和激光投影仪的相对位置不变;包括以下标定步骤:
8.根据预设规则将标定板摆放在工作平面上并对所述标定板进行拍摄,得到若干第
一标定板图像;
9.将所述第一标定板图像转换为对应的灰度图像,对所述灰度图像中的标定板上的圆形标志点进行编号,根据所述圆形标志点及其编号计算相机的内部参数;
10.通过针对标定板建立基准世界坐标系和临时坐标系,并根据所述基准世界坐标系和临时坐标系计算相机的外部参数;
11.根据照射在不同平面的激光线拟合出光平面,计算所述光平面在基准世界坐标系中相对于坐标系原点的位姿变换矩阵。
12.进一步的,根据以下步骤计算所述相机的内部参数:
13.根据预设规则将标定板摆放在工作平面上并对所述标定板进行拍摄,得到若干第一标定板图像;
14.将所述第一标定板图像转换为对应的灰度图像,对所述灰度图像中的标定板上的圆形标志点进行编号,根据所述圆形标志点及其编号建立标定板坐标系;
15.根据所述标定板坐标系获取所述第一标定板图像中标定板的位置和标定板中圆形标志点的圆心位置,并根据所述标定板的位置和标定板中圆形标志点的圆心位置计算所述标定板在实际三维空间中相对于相机的位姿;
16.根据所述位姿和旋转矩阵的正交性,建立所述内部参数的线性方程,并通过所述线性方程计算相机的内部参数。
17.进一步的,根据所述基准世界坐标系和临时坐标系计算相机的外部参数,包括以下步骤:
18.将第一标定板的中心点沿垂直于工作平面的方向降低一个标定板厚度,并将降低后的中心点作为基准世界坐标系的原点,定义垂直于标定板平面向上的方向为基准世界坐标系的z轴正方向,根据所述标定板的方向标志确定x轴和y轴的正方向;计算出所述标定板在相机坐标系下的第一位姿;
19.将第二标定板的中心点沿垂直于工作平面的方向降低一个标定板厚度,并将降低后的中心点作为临时坐标系的原点,定义垂直于标定板平面向上的方向为临时坐标系的z轴正方向,根据所述标定板的方向标志确定x轴和y轴的正方向;计算出所述标定板在相机坐标系下的第二位姿;
20.根据所述第一位姿和第二位姿计算相机的外部参数;所述第一标定板为摆放在工作平面上,同时,水平居中摆放于相机视野正中央位置的标定板;所述第二标定板为垫高第一距离后摆放在工作平面上,同时,水平居中摆放于相机视野正中央位置的标定板。
21.进一步的,所述根据照射在不同平面的激光线拟合出光平面,计算所述光平面在基准世界坐标系中相对于坐标系原点的位姿变换矩阵,包括以下步骤:
22.将激光投影仪的激光线照射在第一平面上,使激光线在相机视野中清晰呈现并通过所述相机对照射在第一平面的激光线进行拍摄,得到第一激光图片;
23.采用灰度重心法计算所述第一激光图片中激光条纹的第一中心坐标,根据所述第一中心坐标计算所述第一激光图片中激光线的第一像素坐标点,将所述第一像素坐标点通过标定后的变换矩阵转换为基准世界坐标系中的三维坐标点;
24.将激光投影仪的激光线照射在第二平面上,使激光线在相机视野中清晰呈现并通过所述相机对照射在第二平面的激光线进行拍摄,得到第二激光图片;
25.采用灰度重心法计算所述第二激光图片中激光条纹的第二中心坐标,根据所述第二中心坐标计算所述第二激光图片中激光线的第二像素坐标点,将所述第二像素坐标点通过标定后的变换矩阵转换为临时坐标系中的三维坐标点;
26.根据第一激光线和第二激光线拟合出光平面,计算光平面在基准世界坐标系中相对于坐标系原点的位姿变换矩阵;所述第一激光线为所述照射在第一平面上的激光线,所述第二激光线为所述照射在第二平面上的激光线。
27.进一步的,所述第一平面为所述第一标定板所在的平面,所述第二平面为所述第二标定板所在的平面。
28.进一步的,所述相机距离所述工作平面的距离为第二距离,所述第二距离大于所述第一距离。
29.进一步的,所述标定板上包括若干个圆形标志点,所述圆形标志点在所述标定板上的排列方式为阵列排列,所述标定板设置有方向标志。
30.进一步的,所述内部参数包括3个径向畸变参数和2个切向畸变参数。
31.本发明另一实施例提供了一种基于高精度线激光3d相机的三维重建方法,用于根据所述基于高精度线激光3d相机的标定方法进行标定后的三维重建,包括以下步骤:
32.计算被测物体的运动方向向量;
33.通过激光投影仪扫描被测物体得到若干扫描图片,针对每张所述扫描图片提取激光线的像素坐标,并将所述像素坐标转换为基准世界坐标系中的三维坐标点;
34.根据被测物体的所述运动方向向量将被测物体的单轮廓逐条拼接起来,形成三维点云模型;所述单轮廓为每次从所述扫描图片中提取的激光线的所述三维坐标点。
35.进一步的,根据以下步骤计算被测物体的运动方向向量:
36.将所述标定板放置在传送带的第一位置,并通过相机对所述第一位置的标定板进行拍照,得到若干第二标定板图像;
37.根据所述第二标定板图像中标定板的位置和圆形标志点的圆心像素的坐标值计算标定板中心的第一原点坐标;
38.通过传送带将所述标定板移动至第二位置,通过所述相机对所述第二位置的标定板进行拍照,得到若干第三标定板图像;
39.根据所述第三标定板图像中标定板的位置和圆形标志点的圆心像素的坐标值计算标定板中心的第二原点坐标;
40.根据所述第一原点坐标、第二原点坐标和所述标定板从第一位置移动至第二位置的步长数,计算所述标定板在基准世界坐标系中的平移向量,所述平移向量为所述被测物体的运动方向向量。
41.本发明的实施例,具有如下有益效果:
42.本发明提供了一种基于高精度线激光3d相机的标定方法和三维重建方法,该标定方法仅用一个标定板即可完成相机标定过程,避免了三维标定方法的计算复杂性和一维标定方法的精度差等问题,大大降低了标定难度,提升了标定效率与标定精度。标定板体型小巧,方便携带与使用,标定结果可以简易复原,避免了三维标定设备成本高携带使用不方便、安装与维护成本高等缺点。适配于工业零件缺陷检测、鞋服行业喷涂打磨等多种三维模型应用场景,适应性强,改善了现有标定设备应用场景单一的缺点。
附图说明
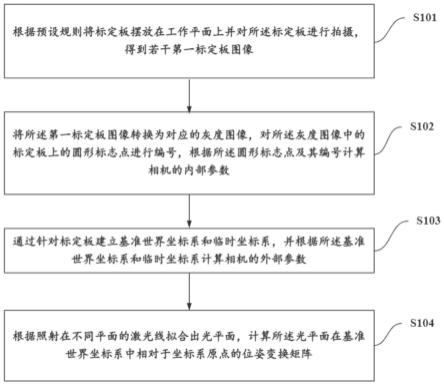
43.图1是本发明一实施例提供的基于高精度线激光3d相机的标定方法的流程示意图;
44.图2是本发明一实施例提供的基于高精度线激光3d相机的三维重建方法的流程示意图;
45.图3是本发明一实施例提供的基于高精度线激光3d相机的三维重建方法的标定板示意图;
46.图4是本发明一实施例提供的基于高精度线激光3d相机的三维重建方法的确定基准世界坐标系x轴正方向和y轴正方向的示意图。
具体实施方式
47.下面将结合本发明中的附图,对本发明中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
48.如图1所示,本发明一实施例提供的一种基于高精度线激光3d相机的标定方法,标定过程中面扫描相机和激光投影仪的固定在型材上,且所述面扫描相机和激光投影仪的相对位置不变;包括以下标定步骤:
49.步骤s101:根据预设规则将标定板摆放在工作平面上并对所述标定板进行拍摄,得到若干第一标定板图像。
50.步骤s102:将所述第一标定板图像转换为对应的灰度图像,对所述灰度图像中的标定板上的圆形标志点进行编号,根据所述圆形标志点及其编号计算相机的内部参数。
51.步骤s103:通过针对标定板建立基准世界坐标系和临时坐标系,并根据所述基准世界坐标系和临时坐标系计算相机的外部参数。
52.步骤s104:根据照射在不同平面的激光线拟合出光平面,计算所述光平面在基准世界坐标系中相对于坐标系原点的位姿变换矩阵。
53.作为其中一种实施例,根据以下步骤计算所述相机的内部参数:
54.根据预设规则将标定板摆放在工作平面上并对所述标定板进行拍摄,得到若干第一标定板图像;
55.将所述第一标定板图像转换为对应的灰度图像,对所述灰度图像中的标定板上的圆形标志点进行编号,根据所述圆形标志点及其编号建立标定板坐标系;
56.根据所述标定板坐标系获取所述第一标定板图像中标定板的位置和标定板中圆形标志点的圆心位置,并根据所述标定板的位置和标定板中圆形标志点的圆心位置计算所述标定板在实际三维空间中相对于相机的位姿;
57.根据所述位姿和旋转矩阵的正交性,建立所述内部参数的线性方程,并通过所述线性方程计算相机的内部参数。
58.作为其中一种实施例,根据所述基准世界坐标系和临时坐标系计算相机的外部参数,包括以下步骤:
59.将第一标定板的中心点沿垂直于工作平面的方向降低一个标定板厚度,并将降低
后的中心点作为基准世界坐标系的原点,定义垂直于标定板平面向上的方向为基准世界坐标系的z轴正方向,根据所述标定板的方向标志确定x轴和y轴的正方向;计算出所述标定板在相机坐标系下的第一位姿;
60.将第二标定板的中心点沿垂直于工作平面的方向降低一个标定板厚度,并将降低后的中心点作为临时坐标系的原点,定义垂直于标定板平面向上的方向为临时坐标系的z轴正方向,根据所述标定板的方向标志确定x轴和y轴的正方向;计算出所述标定板在相机坐标系下的第二位姿;
61.根据所述第一位姿和第二位姿计算相机的外部参数;所述第一标定板为摆放在工作平面上,同时,水平居中摆放于相机视野正中央位置的标定板;所述第二标定板为垫高第一距离后摆放在工作平面上,同时,水平居中摆放于相机视野正中央位置的标定板。具体地,本实施方式的第一距离为100mm。
62.作为其中一种实施例,根据以下步骤计算所述光平面的位姿:
63.将激光投影仪的激光线照射在第一平面上,使激光线在相机视野中清晰呈现并通过所述相机对照射在第一平面的激光线进行拍摄,得到第一激光图片;
64.采用灰度重心法计算所述第一激光图片中激光条纹的第一中心坐标,根据所述第一中心坐标计算所述第一激光图片中激光线的第一像素坐标点,将所述第一像素坐标点通过标定后的变换矩阵转换为基准世界坐标系中的三维坐标点;
65.将激光投影仪的激光线照射在第二平面上,使激光线在相机视野中清晰呈现并通过所述相机对照射在第二平面的激光线进行拍摄,得到第二激光图片;
66.采用灰度重心法计算所述第二激光图片中激光条纹的第二中心坐标,根据所述第二中心坐标计算所述第二激光图片中激光线的第二像素坐标点,将所述第二像素坐标点通过标定后的变换矩阵转换为临时坐标系中的三维坐标点;
67.根据第一激光线和第二激光线拟合出光平面,计算光平面在基准世界坐标系中相对于坐标系原点的位姿变换矩阵;所述第一激光线为所述照射在第一平面上的激光线,所述第二激光线为所述照射在第二平面上的激光线。
68.所述第一平面为所述第一标定板所在的平面,所述第二平面为所述第二标定板所在的平面。
69.作为其中一种实施例,所述相机距离所述工作平面的距离为第二距离,所述第二距离大于所述第一距离。优选的,所述第二距离为400mm,在其他实施方式中,所述第二距离可为大于第一距离100mm的其他高度。
70.作为其中一种实施例,所述标定板上包括若干个圆形标志点,所述圆形标志点在所述标定板上的排列方式为阵列排列,所述标定板设置有方向标志位。优选的,如图3所示,所述标定板采用49个圆形标志点的70mm标定板,所述圆形标志点在所述标定板上的排列方式为7行7列,所述标定板左上角的尖角为标定板的方向标志。
71.作为其中一种详细的实施例,根据步骤a01-步骤a03,完成三维重建前的标定工作。
72.步骤a01:计算相机的内部参数。具体包括以下子步骤:
73.子步骤a011:按照一定的规则将标定板摆放在工作平面上,并通过拍摄得到若干第一标定板图像。具体包括以下子步骤:
74.子步骤a0111:将标定板边缘紧贴相机图像视野边缘,依次在相机图像视野的左下角、左上角、右上角、右下角分别摆放拍摄,并将标定板尖角部分(即图3中标定板的左上角)依次朝向图像视野边角的四个方向。
75.子步骤a0112:将标定板绕工作平面的法向量坐标轴每次逆时针旋转30
°
,依次在相机图像视野边缘部分(不包含所述左下角、左上角、右上角、右下角)摆放拍照,并在图像视野中央附近区域(不包含边缘部分)依次旋转摆放拍照,使得子步骤a0111和子步骤a0112步骤中标定板摆放位置覆盖了相机图像的整个视野范围。
76.子步骤a0113:将标定板以倾斜于所在平面60
°
的角度摆放于相机视野的四条边缘线(即相机视野上下左右的边缘线)的中间位置,标定板外边缘紧贴相机视野边缘,标定板尖角部分依次朝向四条边缘线方向,并拍照。
77.子步骤a0114:将标定板以倾斜于所在平面60
°
的角度摆放于相机视野中央靠四条边缘线部分位置,标定板尖角部分依次朝向视野四个尖角位置,并拍照。
78.子步骤a0115:将标定板水平摆放于被测物件上表面,并拍照。
79.子步骤a0116:将标定板摆放在工作平面上,同时,水平居中摆放于相机视野正中央位置,并拍照。
80.子步骤a0117:在工作平面上摆放一个规整立方体,将标定板摆放在立方体的上表面处,使得标定板相对于上个步骤垫高了100mm,同时,水平居中摆放于相机视野正中央位置,并拍照。
81.子步骤a0116和子步骤a0117中的操作是为了拍摄两个不同高度工作面的激光线图片,才可以拟合一个激光平面。
82.子步骤a012:将所述第一标定板图像转换为对应的灰度图像,对所述灰度图像中的标定板上的圆形标志点进行编号,根据所述圆形标志点及其编号建立标定板坐标系。具体包括以下子步骤:
83.子步骤a0121:根据pal,即相位逐行交变电视制式,对所述第一标定板图像(所述第一标定板图像为彩色图像)中每个像素点的r、g、b三原色值通过下式计算出对应的亮度值y=0.222r 0.707g 0.071b;
84.并将该亮度值作为灰度图像中对应位置像素点的亮度值,最终获得与所述第一标定板图像的原彩色图像对应的灰度图像。
85.子步骤a0122:根据灰度图像中灰度值的突变位置获取图像的边缘位置,获取图像中标定板的位置以及标定板上圆形标志点的圆心像素坐标点的位置。
86.子步骤a0123:对标定板上的圆形标志点逐一按顺序编码,将距离标定板的尖角最近的圆形标志点定义为1号特征点,假设标定板的尖角在左上角,则将1号特征点右侧的圆形标志点定义为2号特征点,以此类推将第一行的圆形标志点标记至7号特征点;第二行最左边的圆形标志点为8号特征点,其右侧的圆形标志点为9号特征点,以此类推逐行向右标记圆形标志点,直至标定板上49个标志点全部被标记完。
87.子步骤a0124:定义沿着1、2、3号标志点的方向为标定板坐标系x轴正方向,沿着1、8、15号标志点的方向为标定板坐标系y轴正方向,将25号标志点圆心坐标定义为标定板坐标系原点位置,即49个圆形标志点的中心点的圆心坐标定义为标定板坐标系原点位置。
88.子步骤a013:根据所述标定板坐标系获取所述第一标定板图像中标定板的位置和
标定板中圆形标志点的圆心位置,并根据所述标定板的位置和标定板中圆形标志点的圆心位置计算所述标定板在实际三维空间中相对于相机的位姿。
89.子步骤a014:根据所述位姿和旋转矩阵的正交性,建立所述内部参数的线性方程,并通过所述线性方程计算相机的内部参数。所述内部参数包括3个径向畸变参数和2个切向畸变参数。具体的,所述线性方程如下:
90.x
distorted
=x(1 k1r2 k2r4 k3r6) 2p1xy p2(r2 2x2);
91.y
distorted
=y(1 k1r2 k2r4 k3r6) p1(r2 2y2) 2p2xy;
92.式中,k1、k2和k3为径向畸变参数,p1和p2为切向畸变参数,(x,y)是畸变点在图像上的原始坐标,(x
distorted
,y
distorted
)是矫正畸变后的新坐标。
93.步骤a02:计算相机的外部参数。所述外部参数包括从相机坐标系到基准世界坐标系的第一变换矩阵和从相机坐标系到临时坐标系的第二变换矩阵。所述相机坐标系以相机的光心为坐标原点,沿着光轴远离相机的方向为z轴方向,x轴和y轴分别平行于图像坐标系的x轴和y轴。具体包括以下子步骤:
94.子步骤a021:将子步骤a0116中的标定板的中心点沿垂直于工作平面的方向降低一个标定板厚度,并将降低后的中心点作为基准世界坐标系的原点,定义垂直于标定板平面向上的方向为基准世界坐标系的z轴正方向,根据标定板的方向标志确定x轴和y轴的正方向。将标定板的中心点降低一个标定板厚度,是为了将基准世界坐标系原点定义在工作平面上,以排除标定板厚度的影响。
95.如图4所示,根据标定板的方向标志确定x轴和y轴的正方向,具体为:将标定板尖角朝向的反方向作为标定板尖角所在对角线的方向,并将标定板尖角所在对角线分解为互相垂直的两个分量,定义所述两个分量分别为世界坐标系的x轴正方向和y轴正方向。
96.子步骤a022:计算出标定板在相机坐标系下的第一位姿,即从相机坐标系到基准世界坐标系的第一变换矩阵。
97.子步骤a023:将子步骤a0117中的标定板的中心点沿垂直于工作平面的方向降低一个标定板厚度,并将降低后的中心点作为临时坐标系的原点,定义垂直于标定板平面向上的方向为临时坐标系的z轴正方向,根据所述标定板的方向标志确定x轴和y轴的正方向。具体的,将标定板尖角朝向的反方向作为标定板尖角所在对角线的方向,并将标定板尖角所在对角线分解为互相垂直的两个分量,定义所述两个分量分别为世界坐标系的x轴正方向和y轴正方向。
98.子步骤a024:计算出标定板在相机坐标系下的第二位姿,即从相机坐标系到临时坐标系的第二变换矩阵。
99.步骤a03:计算所述光平面的位姿。具体包括以下子步骤:
100.子步骤a031:将激光投影仪的激光线照射在第一平面上,使激光线在相机视野中清晰呈现并通过所述相机对照射在第一平面的激光线进行拍摄,得到第一激光图片。具体的,取走所述标定板,打开激光投影仪并降低相机曝光时间,将激光线照射在所述子步骤a0116中标定板所在平面上,并使得激光线在相机视野中央清晰呈现。
101.子步骤a032:采用灰度重心法计算所述第一激光图片中激光条纹的第一中心坐标,根据所述第一中心坐标计算所述第一激光图片中激光线的第一像素坐标点,将所述第一像素坐标点通过标定后的变换矩阵转换为基准世界坐标系中的三维坐标点。具体的,采
用灰度重心法来求取所述第一激光图片中激光条纹的第一中心坐标,原理如下:
102.对激光条纹逐列进行计算,把每一列计算出的激光条纹灰度重心的纵坐标作为其中心坐标。沿垂直于激光线方向,将激光条纹截面第k列坐标位置设为(xk,yi),则该列坐标对应的灰度值为f(xk,yi),其中变量i=1,
…
,m,其中m表示该列激光条纹的截面宽度,一般取为奇数。计算公式表示如下:
[0103][0104]
式中,k表示激光条纹的长度变量,变化范围根据图像尺寸确定;yk指的是第k列激光条纹的中心点列坐标值。进一步通过去除伪极大值,消除阶跃点,连接断点,以使中心线更为平滑连续。将提取到的激光线的像素坐标点通过标定后的变换矩阵转换为基准世界坐标系中的三维坐标点(x
ai
,y
ai
,z
ai
)。由于拍照得到的激光线照片不是一条细线,而是一片由许多像素点组合而成的区域。为了后续三维重建的精准性,需要寻找一条细线来更加精准地代替这片激光线区域,这条细线就叫做激光线的中心线。公式(1)就是为了在这片区域中确定激光中心线的具体位置。
[0105]
子步骤a033:将激光投影仪的激光线照射在第二平面上,使激光线在相机视野中清晰呈现并通过所述相机对照射在第二平面的激光线进行拍摄,得到第二激光图片。
[0106]
子步骤a034:采用灰度重心法计算所述第二激光图片中激光条纹的第二中心坐标,根据所述第二中心坐标计算所述第二激光图片中激光线的第二像素坐标点,将所述第二像素坐标点通过标定后的变换矩阵转换为临时坐标系中的三维坐标点。在子步骤a034中采用与子步骤a032相同的灰度重心法计算所述第二中心坐标。
[0107]
子步骤a035:根据第一激光线和第二激光线拟合出光平面,计算光平面在基准世界坐标系中相对于坐标系原点的位姿变换矩阵;所述第一激光线为所述照射在第一平面上的激光线,所述第二激光线为所述照射在第二平面上的激光线。由于第一激光线和第二激光线来自同一个激光投影仪,且照射过程中激光投影仪静止不动,因此这第一激光线和第二激光线相互平行。
[0108]
所述第一平面为所述子步骤a0116中标定板所在的平面,所述第二平面为子步骤a0117中标定板所在的平面。
[0109]
本发明实施例仅用一个标定板即可完成相机标定过程,避免了三维标定方法的计算复杂性和一维标定方法的精度差等问题,大大降低了标定难度,提升了标定效率与标定精度。标定板体型小巧,方便携带与使用,标定结果可以简易复原,避免了三维标定设备成本高携带使用不方便、安装与维护成本高等缺点。适配于工业零件缺陷检测、鞋服行业喷涂打磨等多种三维模型应用场景,适应性强,改善了现有标定设备应用场景单一的缺点。
[0110]
在上述标定方法发明实施例的基础上,本发明对应提供了三维重建方法实施例,如图2所示;
[0111]
本发明另一实施例提供了一种基于高精度线激光3d相机的三维重建方法,用于根据上述的标定方法发明实施例进行标定后的三维重建,包括以下步骤:
[0112]
步骤s105:计算被测物体的运动方向向量;
[0113]
步骤s106:通过激光投影仪扫描被测物体得到若干扫描图片,针对每张所述扫描图片提取激光线的像素坐标,并将所述像素坐标转换为基准世界坐标系中的三维坐标点;
[0114]
步骤s107:根据被测物体的所述运动方向向量将被测物体的单轮廓逐条拼接起来,形成三维点云模型;所述单轮廓为每次从所述扫描图片中提取的激光线的所述三维坐标点。
[0115]
作为其中一种实施例,根据以下步骤计算被测物体的运动方向向量:
[0116]
将所述标定板放置在传送带的第一位置,并通过相机对所述第一位置的标定板进行拍照,得到若干第二标定板图像;
[0117]
根据所述第二标定板图像中标定板的位置和圆形标志点的圆心像素的坐标值计算标定板中心的第一原点坐标;
[0118]
通过传送带将所述标定板移动至第二位置,通过所述相机对所述第二位置的标定板进行拍照,得到若干第三标定板图像;
[0119]
根据所述第三标定板图像中标定板的位置和圆形标志点的圆心像素的坐标值计算标定板中心的第二原点坐标;
[0120]
根据所述第一原点坐标、第二原点坐标和所述标定板从第一位置移动至第二位置的步长数,计算所述标定板在基准世界坐标系中的平移向量,所述平移向量为所述被测物体的运动方向向量。
[0121]
作为其中一种详细的实施例,根据步骤a04-步骤a07,完成标定后的三维重建工作。
[0122]
步骤a04:计算被测物体的运动方向向量。具体包括以下子步骤:
[0123]
子步骤a041:将所述标定板放置在传送带的第一位置,并通过相机对所述第一位置的标定板进行拍照,得到若干第二标定板图像。具体的,关闭激光投影仪,调整相机曝光时间,使得标定板能在相机视野中清晰成像,将标定板放置于传送带上的第一位置拍照,得到若干第二标定板图像。
[0124]
子步骤a042:根据所述第二标定板图像中标定板的位置和圆形标志点的圆心像素的坐标值计算标定板中心的第一原点坐标。具体的,根据所述子步骤a0122的方法获取所述第二标定板图像中标定板的位置和圆形标志点的圆心像素的坐标值。
[0125]
子步骤a043:通过传送带将所述标定板移动至第二位置,通过所述相机对所述第二位置的标定板进行拍照,得到若干第三标定板图像。
[0126]
子步骤a044:根据所述第三标定板图像中标定板的位置和圆形标志点的圆心像素的坐标值计算标定板中心的第二原点坐标。具体的,根据所述子步骤a0122的方法获取所述第三标定板图像中标定板的位置和圆形标志点的圆心像素的坐标值。
[0127]
子步骤a045:根据所述第一原点坐标、第二原点坐标和所述标定板从第一位置移动至第二位置的步长数(如从第一位置到第二位置的步长数为n),计算所述标定板在基准世界坐标系中的平移向量(即被测物体移动方向的向量矩阵),所述平移向量为所述被测物体的运动方向向量。
[0128]
步骤a05:通过激光投影仪扫描被测物体得到若干扫描图片,采用灰度重心法计算所述扫描图片中激光条纹的第三中心坐标,再根据所述第三中心坐标计算激光线的第三像素坐标点,并将所述第三像素坐标点转换为基准世界坐标系中的三维坐标点。具体的,取走标定板,打开激光投影仪并调整相机曝光时间,将激光线照射在被测物体上,使得激光线在相机视野中央清晰呈现;将被测物体放在激光线一侧,打开传送带,使被测物体能够被激光
线扫描完全,相机每隔1个步长取图拍照;对拍照后的图片,利用灰度重心法来求取激光条纹的第三中心点坐标,并将提取到的激光线的第三像素坐标点转换为基准世界坐标系中的三维坐标点。
[0129]
步骤a06:根据被测物体的所述运动方向向量将被测物体的单轮廓逐条拼接起来,形成三维点云模型;所述单轮廓为每次从所述扫描图片中提取的激光线的所述三维坐标点。具体的,将步骤a05中每次提取到的激光线三维坐标点作为被测物体的单轮廓,根据被测物体的所述运动方向向量将提取到的单轮廓逐条拼接起来,形成含有噪点的三维点云模型。
[0130]
步骤a07:使用连通域点数筛选法或半径过滤器对所述三维点云模型进行滤波去噪处理,得到无关噪点较少的被测物体的三维点云模型。
[0131]
本发明实施例仅用一个标定板即可完成相机标定过程,避免了三维标定方法的计算复杂性和一维标定方法的精度差等问题,大大降低了标定难度,提升了标定效率与标定精度。标定板体型小巧,方便携带与使用,标定结果可以简易复原,避免了三维标定设备成本高携带使用不方便、安装与维护成本高等缺点。适配于工业零件缺陷检测、鞋服行业喷涂打磨等多种三维模型应用场景,适应性强,改善了现有标定设备应用场景单一的缺点。
[0132]
以上所述是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也视为本发明的保护范围。
[0133]
本领域普通技术人员可以理解实现上述实施例中的全部或部分流程,是可以通过计算机程序来指令相关的硬件来完成,所述的程序可存储于一计算机可读取存储介质中,该程序在执行时,可包括如上述各实施例的流程。其中,所述的存储介质可为磁碟、光盘、只读存储记忆体(read-only memory,rom)或随机存储记忆体(random access memory,ram)等。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
