1.本发明涉及列车安全运行领域,尤其涉及一种安全驾驶的方法和系统。
背景技术:
2.铁路是我国国民经济的大动脉,对国家经济建设起着举足轻重的作用。科学技术的迅猛发展,不断推动着我国铁路现代化水平的提升和进步。然而,传统的铁路运输系统仍面临许多新的难题,其中最突出的问题之一就是行车安全。
3.机车驾驶员的值乘状态直接关系到行车安全。由于身体不适、疲劳驾驶、间断瞭望、夜间行车等各种原因,个别机车驾驶员值乘过程中会存在注意力不集中、工作状态不佳、甚至打瞌睡等违规现象。机车驾驶员不能及时发现人员、牲畜或异物侵限、机车信号设备异常等行车安全隐患并采取有效措施,会对列车行车安全构成严重威胁。在国有铁路、地方铁路、企业铁路等企业运输生产中,类似异物、牲畜侵限,机车驾驶员发现处置不及时造成列车脱轨;人员上道侵限,机车驾驶员发现处置不及时造成人员伤亡;机车驾驶员瞭望不彻底,列车在平交道口与公路车辆相撞;山区铁路列车与塌方落石相撞造成机车乘务员殉职的恶性事故屡见不鲜。这些事故的发生,轻则造成人员受伤、车辆设备受损,运输任务暂时中断;重者造成车毁人亡的重大行车事故。
4.为了保证列车的行车安全,现有技术存在多种方式。例如,申请号为2016110480786的发明专利公开了一种机车乘务员实时视频疲劳检测方法。申请号为2016109018847的发明专利公开了一种疲劳驾驶检测方法。然而,以上方法存在着诸多缺陷。一是在进行判断时过于简单,没有考虑驾驶员的个人特点。二是判断方式也是通过常规的检测眼睛开闭,心率等参数,在驾驶员有心躲避监管的情况下难以真正起到作用。三是仅仅进行了简单告警,不能够真正起到提高行驶安全的作用。
技术实现要素:
5.为了解决列车驾驶员的安全驾驶问题。本发明提供了一种列车安全驾驶方法,所述方法包括:
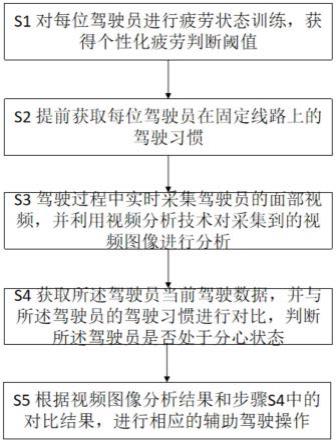
6.s1对每位驾驶员进行疲劳状态训练,获得个性化的疲劳判断阈值。
7.s2提前获取每位驾驶员在固定线路上的驾驶习惯。
8.s3驾驶过程中实时采集驾驶员的面部视频,并利用视频分析技术对采集到的视频图像进行分析。
9.具体分析过程如下:
10.s31如果在视频中一定时间内定位不到人脸,视觉分析终端中的离岗计数器加1,当离岗计数器超过预设离岗阈值时,判断驾驶员处于离岗状态;如果没有超过预设离岗阈值,继续检测是否有人,当检测到有人时,离岗计数器清零。
11.s32在检测到的视频图像中定位人脸,在人脸区域中定位眼睛、鼻子、嘴巴,计算n帧图像中对应的眼睛开闭频率和嘴巴状态参数。并计算n帧图像中鼻子的位置,拟合得到鼻
子运动轨迹,其中n》3。
12.s33如眼睛开闭频率大于预设眼睛开闭阈值,表情计数器加1;如嘴巴状态参数大于预设的嘴巴张开阈值,表情计数器加1。表情计数器大于设定的表情阈值,判断驾驶员处于疲劳状态。将拟合得到的鼻子运动轨迹与预设鼻子运动轨迹进行相似度的判断,判断结果为相似时,判断驾驶员处于疲劳状态。值得注意的是,表情计数与鼻子运动轨迹的相似度判断是并行进行的,目的是更准确地进行疲劳状态判断。
13.s4获取所述驾驶员当前驾驶数据,并与所述驾驶员的驾驶习惯进行对比,若当前驾驶数据与驾驶习惯相比偏离程度达到预设偏离阈值,则判断所述驾驶员处于分心状态。
14.s5根据视频图像分析结果和步骤s4中的对比结果,进行相应的辅助驾驶操作。
15.本发明的有益效果是:1.对驾驶员进行疲劳状态训练,获得驾驶员的个性化数据,提高疲劳状态判断准确度。2.进行有梯度的疲劳状态判断,综合考虑个性化的眼睛开闭程度、嘴巴状态参数以及鼻子运动轨迹,可有效避免驾驶员故意躲避监控的问题。3.利用驾驶习惯判断驾驶员分心状态,解决在驾驶员非疲劳状态下的列车安全问题。
附图说明
16.图1为列车驾驶员驾驶状态智能识别图;
17.图2为驾驶员面部视频分析图;
18.图3为列车安全驾驶系统框图;
19.图4为分析单元框图。
具体实施方式
20.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
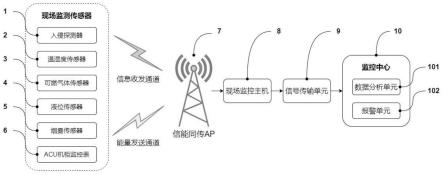
21.机车驾驶员值乘状态智能预警系统,采用分层式结构框架。主要由车载子系统、数据传输子系统和地面综合应用子系统三级组成。
22.车载子系统主要包括图像采集器、视觉分析终端、车载终端主机、tax板卡、连接线缆、辅助配件。该装置可以在线监控乘务员的值乘状态。在行车过程中,如果驾驶员出现精神不佳,甚至疲劳盹睡等间断瞭望时,能够及时告警,同时将提醒信息和当时的驾驶员音视频数据实时发送至地面机务段安全生产指挥中心在线分析系统,然后由服务器对数据进行保存。
23.数据传输子系统将上述信息发送到地面在线分析系统,并接收来自地面在线分析系统的指令信息。通过gsm、gprs、3g(4g)、nr发送的实时信息经防火墙发送到数据服务器,实时视频信息通过4g、nr发送到流媒体服务器,能够实时查看机车乘务员的值乘状态,点播历史报警信息。
24.地面综合应用子系统能够实时检测机车动态、驾驶员的值乘情况、精神状态等信息,自动生成退勤凭证和统计报表,管理者可分权限对重点时间、重点区域、重点人员的值乘状态进行检索和分析,针对问题采取处理措施,为安全风险管理提供重要技术支撑。
25.实施例1
26.本实施例提供一种安全驾驶方法,请参阅附图1,系统能够全天候实时在线监测驾驶员的驾驶状态,当监测到驾驶员有视野偏离、精神不振、疲惫、走神等现象时,立即实施分级警报与处理。具体的处理流程如下。
27.s1对驾驶员进行疲劳状态训练,获得个性化的疲劳判断阈值。
28.由于驾驶员的驾驶状态与考核结果息息相关,可能会出现驾驶员为了逃避考核而刻意做出违背生理规律的举动。例如,现有技术中仅通过检测眼睛的开闭频率来判断驾驶员是否疲劳驾驶,列车驾驶员为了避开检测,可能在困顿状态下强撑着不眨眼,但此时头部可能不受控制的上下运动。为了更准确的进行驾驶员疲劳状态判断,有必要进行疲劳状态的训练。又因为驾驶员的生理参数各不相同,采取相同的判断标准容易产生误判,因此需要获得个性化的疲劳判断阈值。
29.具体来说,利用vr技术模拟具体的驾驶线路,检测驾驶员在疲劳状态下的头部上鼻子的运动轨迹,多次测量后选取轨迹中重合度高的点进行拟合,得到预设鼻子运动轨迹。之所以选择鼻子作为统计对象,有三方面的考量,一是因为鼻子位于五官的中心位置,便于进行图像捕捉。二是因为在疲劳状态下鼻子始终处于固定状态。三是因为鼻子尺寸较小,轨迹捕捉的精度较高。
30.同时检测驾驶员在疲劳状态下的眼睛开闭频率,得到预设眼睛开闭阈值。并得到驾驶员在疲劳状态下的嘴巴张开状态,得到预设嘴巴张合阈值。
31.s2提前获取驾驶员在固定线路上的驾驶习惯。
32.驾驶员处于非疲倦的状态也不意味着在专心驾驶,也有可能处于分心状态或脑子放空,此时疲劳判断失效,却仍存在驾驶风险。为解决这一问题,可获取驾驶员的驾驶习惯。与其他运输工具相比,列车具有线路固定,驾驶可预期性强的特点。正常情况下,驾驶员在面对熟悉的线路时,会有相对固定的驾驶操作。例如,在进站前一定时间内开始均匀减速,在离站一定时间后开始均匀加速,在市区行驶速度较低,在野外行驶速度较快等。如果驾驶员在驾驶过程中偏离驾驶习惯程度较重,则有极大可能处于分心驾驶的状态下。此时也会造成行驶的危险。
33.优选地,所述驾驶习惯包括:所述驾驶员在固定列车线路上开始进行的加速操作的位置、减速操作的位置和匀速操作的位置以及加速操作的持续时间和加速度、减速操作的持续时间和加速度和匀速操作的持续时间;以及不同的速度区间,包括加速区间、减速区间、匀速区间。
34.优选地,所述加速区间的开始位置由驾驶员习惯的加速操作的开始位置和加速标记位置通过聚类算法来确定;所述加速区间的长度与驾驶员历史的加速操作的持续时间和当前的速度以及目的速度相关;所述减速区间的起始位置由驾驶员习惯的减速操作的开始位置和减速标记位置通过聚类算法来确定,在沿着列车前进方向上,若聚类算法确定的减速区间的起始位置位于减速标记位置前面,则将减速区间的起始位置确定为所述减速标记的位置;所述减速区间的长度与驾驶人的历史的减速操作的持续时间和当前的速度和目标速度相关。
35.例如,火车站点a和b之间的距离为100km,以a点为火车运行起点向b点,距离a点20km处有加速标记,根据驾驶人的驾驶习惯其在距离a点18km处加速;根据聚类算法得出所
述驾驶人在距离a点18.5km处开始加速;假设根据火车当前速度和目标速度得出加速区间长度为15km,则加速区间[18.5km,33.5km]。根据驾驶人的驾驶习惯其在距离a点77km处减速;减速标记距离a点75km,根据聚类算法得出所述驾驶人在距离a点77.5km处开始减速;则所述减速区间为[75km,100km]。
[0036]
s3驾驶过程中实时采集驾驶员的面部视频,并利用视频分析技术对采集到的视频图像进行分析。
[0037]
具体分析过程如下:
[0038]
s31如果在视频中一定时间内定位不到人脸,视觉分析终端中的离岗计数器加1,当离岗计数器超过预设离岗阈值时,判断驾驶员处于离岗状态;如果没有超过预设离岗阈值,继续检测是否有人,当检测到有人时,离岗计数器清零。
[0039]
s32在检测到的视频图像中定位人脸,在人脸区域中定位眼睛、鼻子、嘴巴,计算n帧图像中对应的眼睛开闭频率和嘴巴状态参数。并计算n帧图像中鼻子的位置,拟合得到鼻子运动轨迹,其中n》3。
[0040]
s33如眼睛开闭频率大于预设眼睛开闭阈值,表情计数器加1;如嘴巴状态参数大于预设的嘴巴张开阈值,表情计数器加1。表情计数器大于设定的表情阈值,判断驾驶员处于疲劳状态。将拟合得到的鼻子运动轨迹与预设鼻子运动轨迹进行相似度的判断,判断结果为相似时,判断驾驶员处于疲劳状态。值得注意的是,表情计数与鼻子运动轨迹的相似度判断是并行进行的,目的是更准确地进行疲劳状态判断。
[0041]
s4获取所述驾驶员当前驾驶数据,并与所述驾驶员的驾驶习惯进行对比,若当前驾驶数据与驾驶习惯相比偏离程度达到预设偏离阈值,则判断所述驾驶员处于分心状态。
[0042]
优选的,预设偏离阈值可以是加速操作位置偏离阈值、减速操作位置偏离阈值和匀速操作位置偏离阈值以及加速操作的持续时间偏离阈值和加速度偏离阈值、减速操作持续时间偏离阈值和匀速操作持续时间偏离阈值中的一项或者多项。
[0043]
s5根据视频图像分析结果和步骤s4中的对比结果,进行相应的辅助驾驶操作。
[0044]
所述辅助驾驶操作具体为:
[0045]
若驾驶员处于离岗状态,车载子系统将离岗状态通过数据传输子系统传输到地面综合应用子系统,并启动自动驾驶。
[0046]
若驾驶员处于疲劳状态,通过车载子系统释放具有提神醒脑功能的气体,若一段时间后再次检测仍处于疲劳状态,车载子系统将疲劳状态通过数据传输子系统传输到地面综合应用子系统,并启动自动驾驶。上述气体为提前存储在车载子系统的气体,如薄荷味的气体,负氧离子含量高的气体。
[0047]
若驾驶员处于分心状态,车载子系统发出提醒专心驾驶的语音信号。
[0048]
实施例2
[0049]
本实施例提供一种列车安全驾驶系统,包括训练单元,获取单元,分析单元,分心判断单元,辅助驾驶单元。
[0050]
训练单元:对驾驶员进行疲劳状态训练,获得个性化的疲劳判断阈值。
[0051]
由于驾驶员的驾驶状态与考核结果息息相关,可能会出现驾驶员为了逃避考核而刻意做出违背生理规律的举动。例如,现有技术中仅通过检测眼睛的开闭频率来判断驾驶员是否疲劳驾驶,列车驾驶员为了避开检测,可能在困顿状态下强撑着不眨眼,但此时头部
可能不受控制的上下运动。为了更准确的进行驾驶员疲劳状态判断,有必要进行疲劳状态的训练。又因为驾驶员的生理参数各不相同,采取相同的判断标准容易产生误判,因此需要获得个性化的疲劳判断阈值。
[0052]
具体来说,利用vr模拟具体的驾驶线路,检测驾驶员在疲劳状态下的头部上鼻子的运动轨迹,多次测量后选取轨迹中重合度高的点进行拟合,得到预设鼻子运动轨迹。之所以选择鼻子作为统计对象,有三方面的考量,一是因为鼻子位于五官的中心位置,便于进行图像捕捉。二是因为在疲劳状态下鼻子始终处于固定状态。三是因为鼻子尺寸较小,轨迹捕捉的精度较高。
[0053]
同时检测驾驶员在疲劳状态下的眼睛开闭频率,得到预设眼睛开闭阈值。并得到驾驶员在疲劳状态下的嘴巴张开状态,得到预设嘴巴张合阈值。
[0054]
获取单元:提前获取驾驶员在固定线路上的驾驶习惯。
[0055]
驾驶员处于非疲倦的状态也不意味着在专心驾驶,也有可能处于分心状态或脑子放空,此时疲劳判断失效,却仍存在驾驶风险。为解决这一问题,可获取驾驶员的驾驶习惯。与其他运输工具相比,列车具有线路固定,驾驶可预期性强的特点。正常情况下,驾驶员在面对熟悉的线路时,会有相对固定的驾驶操作。例如,在进站前一定时间内开始均匀减速,在离站一定时间后开始均匀加速,在市区行驶速度较低,在野外行驶速度较快等。如果驾驶员在驾驶过程中偏离驾驶习惯程度较重,则有极大可能处于分心驾驶的状态下。此时也将造成行驶的危险。
[0056]
优选地,所述驾驶习惯包括:所述驾驶员在固定列车线路上开始进行的加速操作的位置、减速操作的位置和匀速操作的位置以及加速操作的持续时间和加速度、减速操作的持续时间和加速度和匀速操作的持续时间;以及不同的速度区间,包括加速区间、减速区间、匀速区间。
[0057]
优选地,所述加速区间的开始位置由驾驶员习惯的加速操作的开始位置和加速标记位置通过聚类算法来确定;所述加速区间的长度与驾驶员历史的加速操作的持续时间和当前的速度以及目的速度相关;所述减速区间的起始位置由驾驶员习惯的减速操作的开始位置和减速标记位置通过聚类算法来确定,在沿着列车前进方向上,若聚类算法确定的减速区间的起始位置位于减速标记位置前面,则将减速区间的起始位置确定为所述减速标记的位置;所述减速区间的长度与驾驶人的历史的减速操作的持续时间和当前的速度和目标速度相关。
[0058]
例如,火车站点a和b之间的距离为100km,以a点为火车运行起点向b点,距离a点20km处有加速标记,根据驾驶人的驾驶习惯其在距离a点18km处加速;根据聚类算法得出所述驾驶人在距离a点18.5km处开始加速;假设根据火车当前速度和目标速度得出加速区间长度为15km,则加速区间[18.5km,33.5km]。根据驾驶人的驾驶习惯其在距离a点77km处减速;减速标记距离a点75km,根据聚类算法得出所述驾驶人在距离a点77.5km处开始减速;则所述减速区间为[75km,100km]。
[0059]
分析单元:驾驶过程中实时采集驾驶员的面部视频,并利用视频分析技术对采集到的视频图像进行分析。
[0060]
分析单元还包括:离岗分析模块,检测模块,疲劳判断模块,
[0061]
离岗分析模块:如果在视频中一定时间内定位不到人脸,视觉分析终端中的离岗
计数器加1,当离岗计数器超过预设离岗阈值时,判断驾驶员处于离岗状态;如果没有超过预设离岗阈值,继续检测是否有人,当检测到有人时,离岗计数器清零。
[0062]
检测模块:在检测到的视频图像中定位人脸,在人脸区域中定位眼睛、鼻子、嘴巴,计算n帧图像中对应的眼睛开闭频率和嘴巴状态参数。并计算n帧图像中鼻子的位置,拟合得到鼻子运动轨迹,其中n》3。
[0063]
疲劳判断模块,如眼睛开闭频率大于预设眼睛开闭阈值,表情计数器加1;如嘴巴状态参数大于预设的嘴巴张开阈值,表情计数器加1。表情计数器大于设定的表情阈值,判断驾驶员处于疲劳状态。将拟合得到的鼻子运动轨迹与预设鼻子运动轨迹进行相似度的判断,判断结果为相似时,判断驾驶员处于疲劳状态。值得注意的是,表情计数与鼻子运动轨迹的相似度判断是并行进行的,目的是更准确地进行疲劳状态判断。
[0064]
分心判断单元:获取所述驾驶员当前驾驶数据,并与所述驾驶员的驾驶习惯进行对比,若当前驾驶数据与驾驶习惯相比偏离程度达到预设偏离阈值,则判断所述驾驶员处于分心状态。
[0065]
优选的,预设偏离阈值可以是加速操作位偏离阈值、减速操作位置偏离阈值和匀速操作位置偏离阈值以及加速操作的持续时间偏离阈值和加速度偏离阈值、减速操作持续时间偏离阈值和匀速操作持续时间偏离阈值中的一项或者多项。
[0066]
辅助驾驶单元:根据视频图像分析结果和所述分心判断单元的对比结果,进行相应的辅助驾驶操作。
[0067]
所述辅助驾驶操作具体为:
[0068]
若驾驶员处于离岗状态,车载子系统将离岗状态通过数据传输子系统传输到地面综合应用子系统,并启动自动驾驶。
[0069]
若驾驶员处于疲劳状态,通过车载子系统释放具有提神醒脑功能的气体,若一段时间后再次检测仍处于疲劳状态,车载子系统将疲劳状态通过数据传输子系统传输到地面综合应用子系统,并启动自动驾驶。上述气体为提前存储在车载子系统的气体,如薄荷味的气体,负氧离子含量高的气体。
[0070]
若驾驶员处于分心状态,车载子系统发出提醒专心驾驶的语音信号。
[0071]
尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。