1.本发明属于图像处理、气象领域,具体涉及对机载综合气象测量系统获取到的飞机所在区域高度和温度分析,并基于此对机载云微粒子探测设备获取的数据进行一种自适应的数据处理。
背景技术:
2.目前,国内各省、直辖市气象部门都在积极开展基于机载云微粒子成像探头的云微物理结构观测实验。对云微物理结构的研究分析不仅有助于提高我们对云层内部云滴、冰晶等不同相态变化的理解,也对我们预测天气变化有重要的指导作用。只有对云微物理结构和云内部相态变化过程有更加直观的观测和更加深入的理解,才能更加科学和有效的实现对天气的人工影响。
3.飞机搭载云微粒子成像探头进行一次穿云实验可以获取到近千万个云微粒子图像数据,这些海量的数据是机载云微粒子成像探头在不同高度、不同温度条件下采集的数据。由于这些数据的采集空间范围很广,由此产生大量问题,其中包括同一个实验任务中所采集的云微粒子图像数据在不同时间段内,云微粒子的特征在个体和统计层面均有巨大差异,这不仅会导致传统云微粒子分类识别方法鲁棒性降低,也给当前发展迅速的基于人工智能的分类识别方法的数据库建立带来困难,因此,如何对海量的云微粒子图像数据进行有效的筛选和划分,成为云微粒子图像处理领域亟待解决的关键问题。
技术实现要素:
4.本发明针对上述现有技术的不足,提出了一种自适应的云微粒子图像数据处理方法,包括以下步骤:
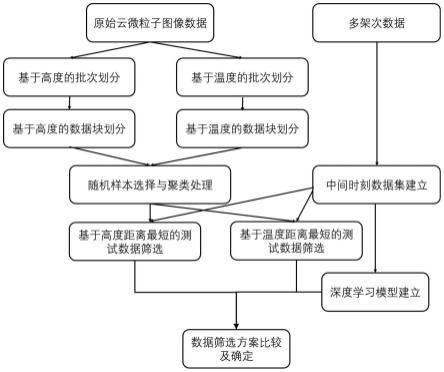
5.一种自适应的云微粒子图像数据处理方法,主要包括以下步骤:
6.步骤1:对云微粒子探测设备采集的原始云微粒子图像数据dl
all
进行基于高度的批次划分:每m分钟划分为一个批次,得到n个批次的原始云微粒子图像数据,其中,m为根据飞机上搭载的机载综合气象测量系统所记录的飞行高度来获取的在整个飞行过程中每爬升l1米消耗的平均分钟数,α为加权系数,其中h(t)为t时刻飞机海拔高度,t为分钟数,取整数,k为加权系数,符号为求偏导数,t为云微粒子探测设备采集数据总分钟数,第n个批次的原始云微粒子图像数据为dln,n∈[1,n],当dl
all
采集时间不足m分钟,所有数据划分为一个批次;
[0007]
步骤2:对步骤1所得的每个批次原始云微粒子图像数据dln进行基于高度的数据块划分,得到图像数据块dl
n,q
;
[0008]
步骤3:对步骤2所得的图像数据块dl
n,q
进行随机样本选择:分别从每个图像数据块dl
n,q
中随机挑选e个原始云微粒子图像数据r
n,q,e
(e),e=[1,
…
,e],每个批次、每个数据块挑选的随机原始云微粒子图像数据组成相应批次、相应数据块的基于高度筛选的随机原
始云微粒子图像数据集r
n,q
;
[0009]
步骤4:对云微粒子探测设备采集的原始云微粒子图像数据dl
all
进行基于温度的批次划分;
[0010]
步骤5:对步骤4所得的每个批次原始云微粒子图像数据基于温度的数据块划分,得到图像数据块dl
y,z
;
[0011]
步骤6:对步骤5所得的dl
y,z
进行随机样本选择:分别从每个原始云微粒子图像数据块dl
y,z
中随机挑选e个原始云微粒子图像数据s
y,z,e
(e),e=[1,
…
,e],每个批次、每个数据块挑选的随机原始云微粒子图像数据组成相应批次、相应数据块的基于温度筛选的随机原始云微粒子图像数据集s
y,z
;
[0012]
步骤7:分别对步骤3和步骤6所得的随机原始云微粒子图像数据集r
n,q
和s
y,z
中的所有图像数据进行k均值聚类处理,得到相应的云微粒子像素块图像数据集 rkm
n,q
和skm
y,z
;
[0013]
步骤8:针对特定时间段原始云微粒子图像数据建立深度学习模型:
[0014]
步骤9:对步骤7所得的云微粒子像素块图像数据集rkm
n,q
进行筛选:
[0015]
步骤10:对步骤7所得的云微粒子像素块图像数据集skm
y,z
进行筛选;
[0016]
步骤11:对云微粒子数据筛选方案进行比较,确定云微粒子图像数据的处理方案。
[0017]
进一步的,步骤2:对步骤1所得的每个dln进行基于高度的数据块划分,得到图像数据块为dl
n,q
包括:每p分钟划分为一个数据块,p<m,得到q个原始云微粒子图像数据块,其中,p为根据飞机上搭载的机载综合气象测量系统所记录的飞行高度来获取的在整个飞行过程中每爬升l2米消耗的平均秒数,β为加权系数,其中v(i)为i时刻飞机海拔高度,i为秒钟数,取整数,b为加权系数,第n个批次中的第q个原始云微粒子图像数据块为dl
n,q
,q∈[1,q],当dl
all
采集时间不足p分钟,所有数据划分为一个块。
[0018]
进一步的,步骤4:对云微粒子探测设备采集的原始云微粒子图像数据dl
all
进行基于温度的批次划分包括:每w分钟划分为一个批次,得到y个批次的原始云微粒子图像数据,其中,w为根据飞机上搭载的机载综合气象测量系统所记录的飞行区域温度来获取的在整个飞行过程中每降低v1摄氏度消耗的平均分钟数,λ为加权系数,其中u(t)为t时刻飞机所在位置温度,t为分钟数,取整数,c为加权系数,符号为求偏导数,t为云微粒子探测设备采集数据总分钟数,第y个批次的原始云微粒子图像数据为 dly,y∈[1,y],当dl
all
采集时间不足w分钟,所有数据划分为一个批次。
[0019]
进一步的,步骤5包括:对步骤4所得的基于温度的数据块划分包括:x<y,得到z个原始云微粒子图像数据块,其中, x根据飞机上搭载的机载综合气象测量系统所记录的飞行区域温度来获取的在整个飞行过程中温度每下降v2摄氏度消耗的平均秒数,η为加权系数,其中u(i) 为i时刻飞机所在位置温度,i为秒钟数,取整数,d为加权系数,第y个批次中的第z个原始云微粒子图像数据块为dl
y,z
,z∈[1,z],当
dl
all
采集时间不足z 分钟,所有数据划分为一个块。
[0020]
进一步的,步骤8:针对特定时间段原始云微粒子图像数据建立深度学习模型包括:
[0021]
步骤8.1:挑选大量的相同任务、不同架次的飞机探测过程中的时间段g所对应的探测到的原始云微粒子图像数据组成数据集dag,其中时间段g为挑选的所有飞行架次的飞行总时长的均值的中间时间段,g的时间长度为g分钟;
[0022]
步骤8.2:首先通过飞机上搭载的机载综合气象测量系统获得所挑选的数据集 dlg对应的不同架次飞机所在区域高度和温度,然后计算出数据集dlg对应高度均值ha和温度均值ua;
[0023]
步骤8.3:对数据集dlg进行像素块人工标记,制作成深度学习模型数据集,并在 resnet34模型上进行训练,得到训练好的深度学习模型。
[0024]
进一步的,步骤9:对步骤7所得的云微粒子像素块图像数据集rkm
n,q
进行筛选:
[0025]
步骤9.1:对数据集rkm
n,q
中的不同批次n、不同数据块q的数据进行遍历,获取对应的飞机所在平均高度hb
n,q
,其中,he_r
n,q,e
(e)为步骤3中随机挑选的e个原始云微粒子图像数据r
n,q,e
(e)对应的飞机高度, e=[1,
…
,e];
[0026]
步骤9.2:对步骤9.1所得的平均高度hb
n,q
进行筛选,找出平均高度hb
n,q
中与步骤8.2所得高度均值ha欧式距离最小的平均高度hbn′
,q
′
。
[0027]
进一步的,步骤10:对步骤7所得的云微粒子像素块图像数据集skm
y,z
进行筛选包括:
[0028]
步骤10.1:对数据集skm
y,z
中的不同批次y、不同数据块z的数据进行遍历,获取对应的飞机所在区域平均温度ub
y,z
,其中, ue_s
y,z,e
(e)为步骤6中随机挑选的e个原始云微粒子图像数据s
y,z,e
(e)对应的飞机所在区域温度,e=[1,
…
,e];
[0029]
步骤10.2:对步骤10.1所得的飞机所在区域平均温度ub
y,z
进行筛选,找出与步骤 8.2所得温度均值ua欧式距离最短的平均温度uby′
,z
′
。
[0030]
进一步的,步骤11:对云微粒子数据筛选方案进行比较,确定云微粒子数据的筛选方案包括:
[0031]
步骤11.1:将步骤9.2所得的平均高度hbn′
,q
′
所对应的批次编号n
′
、数据块编号q
′
的数据输入到步骤8.3所得的深度学习模型中,并对该数据进行像素块人工标记,然后将深度学习模型处理结果和人工标记结果进行相似性计算,得到基于高度筛选的相似性值hsin′
,q
′
;
[0032]
步骤11.2:将步骤10.2所得的平均温度uby′
,z
′
所对应的批次编号y
′
、数据块编号z
′
的数据输入到步骤8.3所得的深度学习模型中,并对该数据进行像素块人工标记,然后将深度学习模型处理结果和人工标记结果进行相似性计算,得到基于温度筛选的相似性值usiy′
,z
′
;
[0033]
步骤11.3:将步骤11.1所得的相似性值hsin′
,q
′
和步骤11.2所得的相似性值
usiy′
,z
′
进行比较,选取更大相似性值对应的数据筛选方案作为对云微粒子数据的筛选方案。
[0034]
本发明解决了以下技术问题:
[0035]
1、将机载综合气象测量系统与云微粒子探测设备相结合来对海量云微粒子数据进行数据筛选,提高了数据筛选准确性和可靠性。
[0036]
2、对云微粒子数据进行了基于高度和基于温度的筛选,提高了云微粒子数据筛选的泛化能力。
[0037]
3、对云微粒子数据进行了批次划分和数据块划分,并且引入基于高度和温度随时间变化率的偏导来对数据筛选方案进行优化,提高了云微粒子数据筛选的准确性和可靠性。
[0038]
4、建立了深度学习网络对不同云微粒子数据筛选方案进行评价,自适应的选择最佳的云微粒子数据筛选方案,提高了云微粒子数据筛选的泛化能力和准确性。
附图说明
[0039]
图1为一种自适应的云微粒子图像数据处理方法流程图;
具体实施方式
[0040]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整的描述,方法流程图如图1所示,包括以下步骤:
[0041]
一种自适应的云微粒子图像数据处理方法,主要包括以下步骤:
[0042]
步骤1:对云微粒子探测设备采集的原始云微粒子图像数据dl
all
进行基于高度的批次划分:每m分钟划分为一个批次,得到n个批次的原始云微粒子图像数据,其中,m为根据飞机上搭载的机载综合气象测量系统所记录的飞行高度来获取的在整个飞行过程中每爬升l1米消耗的平均分钟数,α为加权系数,其中h(t)为t时刻飞机海拔高度,t为分钟数,取整数,k为加权系数,符号为求偏导数,t为云微粒子探测设备采集数据总分钟数,第n个批次的原始云微粒子图像数据为dln,n∈[1,n],当dl
all
采集时间不足m分钟,所有数据划分为一个批次;
[0043]
步骤2:对步骤1所得的每个批次原始云微粒子图像数据dln进行基于高度的数据块划分,得到图像数据块dl
n,q
;
[0044]
步骤3:对步骤2所得的图像数据块dl
n,q
进行随机样本选择:分别从每个图像数据块dl
n,q
中随机挑选e个原始云微粒子图像数据r
n,q,e
(e),e=[1,
…
,e], e∈[2,10],每个批次、每个数据块挑选的随机原始云微粒子图像数据组成相应批次、相应数据块的基于高度筛选的随机原始云微粒子图像数据集r
n,q
;
[0045]
步骤4:对云微粒子探测设备采集的原始云微粒子图像数据dl
all
进行基于温度的批次划分;
[0046]
步骤5:对步骤4所得的每个批次原始云微粒子图像数据基于温度的数据块划分,得到图像数据块dl
y,z
;
[0047]
步骤6:对步骤5所得的dl
y,z
进行随机样本选择:分别从每个原始云微粒子图像数据块dl
y,z
中随机挑选e个原始云微粒子图像数据s
y,z,e
(e),e=[1,
…
,e],每个批次、每个数据块挑选的随机原始云微粒子图像数据组成相应批次、相应数据块的基于温度筛选的随机原始云微粒子图像数据集s
y,z
;
[0048]
步骤7:分别对步骤3和步骤6所得的随机原始云微粒子图像数据集r
n,q
和s
y,z
中的所有图像数据进行k均值聚类处理,得到相应的云微粒子像素块图像数据集 rkm
n,q
和skm
y,z
;
[0049]
步骤8:针对特定时间段原始云微粒子图像数据建立深度学习模型:
[0050]
步骤9:对步骤7所得的云微粒子像素块图像数据集rkm
n,q
进行筛选:
[0051]
步骤10:对步骤7所得的云微粒子像素块图像数据集skm
y,z
进行筛选;
[0052]
步骤11:对云微粒子数据筛选方案进行比较,确定云微粒子图像数据的处理方案。
[0053]
进一步的,步骤2:对步骤1所得的每个dln进行基于高度的数据块划分,得到图像数据块为dl
n,q
包括:每p分钟划分为一个数据块,p<m,得到q个原始云微粒子图像数据块,其中,p为根据飞机上搭载的机载综合气象测量系统所记录的飞行高度来获取的在整个飞行过程中每爬升l2米消耗的平均秒数,β为加权系数,其中v(i)为i时刻飞机海拔高度,i为秒钟数,取整数,b为加权系数,第n个批次中的第q个原始云微粒子图像数据块为dl
n,q
,q∈[1,q],当dl
all
采集时间不足p分钟,所有数据划分为一个块。
[0054]
进一步的,步骤4:对云微粒子探测设备采集的原始云微粒子图像数据dl
all
进行基于温度的批次划分包括:每w分钟划分为一个批次,得到y个批次的原始云微粒子图像数据,其中,w为根据飞机上搭载的机载综合气象测量系统所记录的飞行区域温度来获取的在整个飞行过程中每降低v1摄氏度消耗的平均分钟数,λ为加权系数,其中u(t)为t时刻飞机所在位置温度,t为分钟数,取整数,c为加权系数,符号为求偏导数,t为云微粒子探测设备采集数据总分钟数,第y个批次的原始云微粒子图像数据为 dly,y∈[1,y],当dl
all
采集时间不足w分钟,所有数据划分为一个批次。
[0055]
进一步的,步骤5包括:对步骤4所得的基于温度的数据块划分包括:x<y,得到z个原始云微粒子图像数据块,其中, x根据飞机上搭载的机载综合气象测量系统所记录的飞行区域温度来获取的在整个飞行过程中温度每下降v2摄氏度消耗的平均秒数,η为加权系数,其中u(i) 为i时刻飞机所在位置温度,i为秒钟数,取整数,d为加权系数,第y个批次中的第z个原始云微粒子图像数据块为dl
y,z
,z∈[1,z],当dl
all
采集时间不足z 分钟,所有数据划分为一个块。
[0056]
进一步的,步骤8:针对特定时间段原始云微粒子图像数据建立深度学习模型包括:
[0057]
步骤8.1:挑选大量的相同任务、不同架次的飞机探测过程中的时间段g所对应的探测到的原始云微粒子图像数据组成数据集dag,其中时间段g为挑选的所有飞行架次的飞
行总时长的均值的中间时间段,g的时间长度为g分钟,g∈[5,30];步骤8.2:首先通过飞机上搭载的机载综合气象测量系统获得所挑选的数据集 dlg对应的不同架次飞机所在区域高度和温度,然后计算出数据集dlg对应高度均值ha和温度均值ua;
[0058]
步骤8.3:对数据集dlg进行像素块人工标记,制作成深度学习模型数据集,并在 resnet34模型上进行训练,得到训练好的深度学习模型。
[0059]
进一步的,步骤9:对步骤7所得的云微粒子像素块图像数据集rkm
n,q
进行筛选:
[0060]
步骤9.1:对数据集rkm
n,q
中的不同批次n、不同数据块q的数据进行遍历,获取对应的飞机所在平均高度hb
n,q
,其中,he_r
n,q,e
(e)为步骤3中随机挑选的e个原始云微粒子图像数据r
n,q,e
(e)对应的飞机高度, e=[1,
…
,e];
[0061]
步骤9.2:对步骤9.1所得的平均高度hb
n,q
进行筛选,找出平均高度hb
n,q
中与步骤8.2所得高度均值ha欧式距离最小的平均高度hbn′
,q
′
。
[0062]
进一步的,步骤10:对步骤7所得的云微粒子像素块图像数据集skm
y,z
进行筛选包括:
[0063]
步骤10.1:对数据集skm
y,z
中的不同批次y、不同数据块z的数据进行遍历,获取对应的飞机所在区域平均温度ub
y,z
,其中, ue_s
y,z,e
(e)为步骤6中随机挑选的e个原始云微粒子图像数据s
y,z,e
(e)对应的飞机所在区域温度,e=[1,
…
,e];
[0064]
步骤10.2:对步骤10.1所得的飞机所在区域平均温度ub
y,z
进行筛选,找出与步骤 8.2所得温度均值ua欧式距离最短的平均温度uby′
,z
′
。
[0065]
进一步的,步骤11:对云微粒子数据筛选方案进行比较,确定云微粒子数据的筛选方案包括:
[0066]
步骤11.1:将步骤9.2所得的平均高度hbn′
,q
′
所对应的批次编号n
′
、数据块编号q
′
的数据输入到步骤8.3所得的深度学习模型中,并对该数据进行像素块人工标记,然后将深度学习模型处理结果和人工标记结果进行相似性计算,得到基于高度筛选的相似性值hsin′
,q
′
;
[0067]
步骤11.2:将步骤10.2所得的平均温度uby′
,z
′
所对应的批次编号y
′
、数据块编号z
′
的数据输入到步骤8.3所得的深度学习模型中,并对该数据进行像素块人工标记,然后将深度学习模型处理结果和人工标记结果进行相似性计算,得到基于温度筛选的相似性值usiy′
,z
′
;
[0068]
步骤11.3:将步骤11.1所得的相似性值hsin′
,q
′
和步骤11.2所得的相似性值usiy′
,z
′
进行比较,选取更大相似性值对应的数据筛选方案作为对云微粒子数据的筛选方案。
[0069]
显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的其他实施例,都属于本发明保护的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。