技术特征:
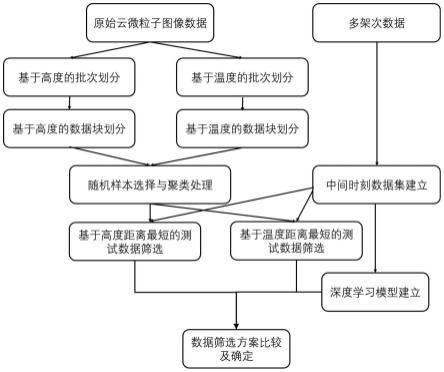
1.一种自适应的云微粒子图像数据处理方法,主要包括以下步骤:步骤1:对云微粒子探测设备采集的原始云微粒子图像数据dl
all
进行基于高度的批次划分:每m分钟划分为一个批次,得到n个批次的原始云微粒子图像数据,其中,m为根据飞机上搭载的机载综合气象测量系统所记录的飞行高度来获取的在整个飞行过程中每爬升l1米消耗的平均分钟数,α为加权系数,其中h(t)为t时刻飞机海拔高度,t为分钟数,取整数,k为加权系数,符号为求偏导数,t为云微粒子探测设备采集数据总分钟数,第n个批次的原始云微粒子图像数据为dl
n
,n∈[1,n],当dl
all
采集时间不足m分钟,所有数据划分为一个批次;步骤2:对步骤1所得的每个批次原始云微粒子图像数据dl
n
进行基于高度的数据块划分,得到图像数据块dl
n,q
;步骤3:对步骤2所得的图像数据块dl
n,q
进行随机样本选择:分别从每个图像数据块dl
n,q
中随机挑选e个原始云微粒子图像数据r
n,q,e
(e),e=[1,
…
,e],每个批次、每个数据块挑选的随机原始云微粒子图像数据组成相应批次、相应数据块的基于高度筛选的随机原始云微粒子图像数据集r
n,q
;步骤4:对云微粒子探测设备采集的原始云微粒子图像数据dl
all
进行基于温度的批次划分;步骤5:对步骤4所得的每个批次原始云微粒子图像数据基于温度的数据块划分,得到图像数据块dl
y,z
;步骤6:对步骤5所得的dl
y,z
进行随机样本选择:分别从每个原始云微粒子图像数据块dl
y,z
中随机挑选e个原始云微粒子图像数据s
y,z,e
(e),e=[1,
…
,e],每个批次、每个数据块挑选的随机原始云微粒子图像数据组成相应批次、相应数据块的基于温度筛选的随机原始云微粒子图像数据集s
y,z
;步骤7:分别对步骤3和步骤6所得的随机原始云微粒子图像数据集r
n,q
和s
y,z
中的所有图像数据进行k均值聚类处理,得到相应的云微粒子像素块图像数据集rkm
n,q
和skm
y,z
;步骤8:针对特定时间段原始云微粒子图像数据建立深度学习模型:步骤9:对步骤7所得的云微粒子像素块图像数据集rkm
n,q
进行筛选:步骤10:对步骤7所得的云微粒子像素块图像数据集skm
y,z
进行筛选;步骤11:对云微粒子数据筛选方案进行比较,确定云微粒子图像数据的处理方案。2.如权利要求1所述的一种自适应的云微粒子图像数据处理方法,其特征在于步骤2:对步骤1所得的每个dl
n
进行基于高度的数据块划分,得到图像数据块为dl
n,q
包括:每p分钟划分为一个数据块,p<m,得到q个原始云微粒子图像数据块,其中,p为根据飞机上搭载的机载综合气象测量系统所记录的飞行高度来获取的在整个飞行过程中每爬升l2米消耗的平均秒数,β为加权系数,其中v(i)为i时刻飞机海拔高度,i为秒钟数,取整数,b为加权系数,第n个批次中的第q个原始云微粒子图像数据块为dl
n,q
,q∈[1,q],当dl
all
采集时间不足p分钟,所有数据划分为一个块。
3.如权利要求1所述的一种自适应的云微粒子图像数据处理方法,其特征在于步骤4:对云微粒子探测设备采集的原始云微粒子图像数据dl
all
进行基于温度的批次划分包括:每w分钟划分为一个批次,得到y个批次的原始云微粒子图像数据,其中,w为根据飞机上搭载的机载综合气象测量系统所记录的飞行区域温度来获取的在整个飞行过程中每降低v1摄氏度消耗的平均分钟数,λ为加权系数,其中u(t)为t时刻飞机所在位置温度,t为分钟数,取整数,c为加权系数,符号为求偏导数,t为云微粒子探测设备采集数据总分钟数,第y个批次的原始云微粒子图像数据为dl
y
,y∈[1,y],当dl
all
采集时间不足w分钟,所有数据划分为一个批次。4.如权利要求1所述的一种自适应的云微粒子图像数据处理方法,其特征在于步骤5包括:对步骤4所得的基于温度的数据块划分包括:x<y,得到z个原始云微粒子图像数据块,其中,x根据飞机上搭载的机载综合气象测量系统所记录的飞行区域温度来获取的在整个飞行过程中温度每下降v2摄氏度消耗的平均秒数,η为加权系数,其中u(i)为i时刻飞机所在位置温度,i为秒钟数,取整数,d为加权系数,第y个批次中的第z个原始云微粒子图像数据块为dl
y,z
,z∈[1,z],当dl
all
采集时间不足z分钟,所有数据划分为一个块。5.如权利要求1所述的一种自适应的云微粒子图像数据处理方法,其特征在于步骤8:针对特定时间段原始云微粒子图像数据建立深度学习模型包括:步骤8.1:挑选大量的相同任务、不同架次的飞机探测过程中的时间段g所对应的探测到的原始云微粒子图像数据组成数据集da
g
,其中时间段g为挑选的所有飞行架次的飞行总时长的均值的中间时间段,g的时间长度为g分钟;步骤8.2:首先通过飞机上搭载的机载综合气象测量系统获得所挑选的数据集dl
g
对应的不同架次飞机所在区域高度和温度,然后计算出数据集dl
g
对应高度均值ha和温度均值ua;步骤8.3:对数据集dl
g
进行像素块人工标记,制作成深度学习模型数据集,并在resnet34模型上进行训练,得到训练好的深度学习模型。6.如权利要求5所述的一种自适应的云微粒子图像数据处理方法,其特征在于步骤9:对步骤7所得的云微粒子像素块图像数据集rkm
n,q
进行筛选:步骤9.1:对数据集rkm
n,q
中的不同批次n、不同数据块q的数据进行遍历,获取对应的飞机所在平均高度hb
n,q
,其中,he_r
n,q,e
(e)为步骤3中随机挑选的e个原始云微粒子图像数据r
n,q,e
(e)对应的飞机高度,e=[1,
…
,e];步骤9.2:对步骤9.1所得的平均高度hb
n,q
进行筛选,找出平均高度hb
n,q
中与步骤8.2所得高度均值ha欧式距离最小的平均高度hb
n
′
,q
′
。7.如权利要求6所述的一种自适应的云微粒子图像数据处理方法,其特征在于步骤10:对步骤7所得的云微粒子像素块图像数据集skm
y,z
进行筛选包括:
步骤10.1:对数据集skm
y,z
中的不同批次y、不同数据块z的数据进行遍历,获取对应的飞机所在区域平均温度ub
y,z
,其中,ue_s
y,z,e
(e)为步骤6中随机挑选的e个原始云微粒子图像数据s
y,z,e
(e)对应的飞机所在区域温度,e=[1,
…
,e];步骤10.2:对步骤10.1所得的飞机所在区域平均温度ub
y,z
进行筛选,找出与步骤8.2所得温度均值ua欧式距离最短的平均温度ub
y
′
,z
′
。8.如权利要求7所述的一种自适应的云微粒子图像数据处理方法,其特征在于步骤11:对云微粒子数据筛选方案进行比较,确定云微粒子数据的筛选方案包括:步骤11.1:将步骤9.2所得的平均高度hb
n
′
,q
′
所对应的批次编号n
′
、数据块编号q
′
的数据输入到步骤8.3所得的深度学习模型中,并对该数据进行像素块人工标记,然后将深度学习模型处理结果和人工标记结果进行相似性计算,得到基于高度筛选的相似性值hsi
n
′
,q
′
;步骤11.2:将步骤10.2所得的平均温度ub
y
′
,z
′
所对应的批次编号y
′
、数据块编号z
′
的数据输入到步骤8.3所得的深度学习模型中,并对该数据进行像素块人工标记,然后将深度学习模型处理结果和人工标记结果进行相似性计算,得到基于温度筛选的相似性值usi
y
′
,z
′
;步骤11.3:将步骤11.1所得的相似性值hsi
n
′
,q
′
和步骤11.2所得的相似性值usi
y
′
,z
′
进行比较,选取更大相似性值对应的数据筛选方案作为对云微粒子数据的筛选方案。9.如权利要求1所述的一种自适应的云微粒子图像数据处理方法,其特征在于步骤3:分别从每个图像数据块dl
n,q
中随机挑选e个原始云微粒子图像数据,其中e∈[2,10]。10.如权利要求5所述的一种自适应的云微粒子图像数据处理方法,其特征在于步骤8.1:g的时间长度为g分钟,其中g∈[5,30]。
技术总结
本发明涉及一种自适应的云微粒子图像数据处理方法,主要包括依据机载综合气象测量系统所得信息,首先对原始云微粒子图像数据进行基于高度的批次、数据块划分及随机样本选择,然后进行基于温度的批次、数据块划分及随机样本选择,接着对数据进行聚类处理,再针对特定时间段原始云微粒子图像数据建立深度学习模型,对云微粒子数据筛选方案进行比较,确定云微粒子图像数据的处理方案,该方法提高了对云微粒子图像数据筛选的准确性、可靠性及泛化能力。力。力。
技术研发人员:刘说 杨玲 何玥 徐梓欣 杨智鹏
受保护的技术使用者:成都信息工程大学
技术研发日:2022.04.11
技术公布日:2022/7/29
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。