1.本发明涉及验证移动体的自身位置推定的精度的自身位置推定精度验证方法和自身位置推定系统。
背景技术:
2.在国际公开第2018/061084中公开了一种自身位置推定方法,该自身位置推定方法是通过排除被推定为相对位置的误差多的物标位置数据来提高自身位置的推定精度的方法。在该自身位置推定方法中,检测存在于移动体的周围的物标与移动体的相对位置,将使检测出的相对位置移动了移动体的移动量后的位置作为物标位置数据进行积累,基于物标位置数据的与移动体的相对位置的可靠性来选择物标位置数据,将选择出的物标位置数据与包含存在于道路上或道路周边的物标的位置信息的地图信息进行对照,由此推定作为移动体的当前位置的自身位置。
3.为了开始移动体的自身位置推定,需要给出自身位置推定开始时的移动体在地图上的位置和姿势来作为初始值。此时,若初始值的精度低,则之后的自身位置推定的精度降低。在自身位置推定的精度的验证时,可能初始值的精度得不到充分保障,无法忽略初始值的精度来验证自身位置推定的精度。
技术实现要素:
4.本发明提供一种能保障初始值的精度,适当地验证自身位置推定的精度的自身位置推定精度验证方法和自身位置推定系统。
5.本公开的第一方案的自身位置推定精度验证方法是对推定移动体在地图上的位置和姿势的自身位置推定的精度进行验证的方法。该自身位置推定精度验证方法包括:使移动体移动至第一检验地点的初始步骤;确定位于第一检验地点的移动体在地图上的位置和姿势,并获取表示确定出的信息的第一检验信息的步骤;将第一检验信息作为初始值来开始自身位置推定的步骤;一边继续自身位置推定一边使移动体移动至第二检验地点的步骤;确定位于第二检验地点的移动体在地图上的位置和姿势,并获取表示确定出的信息的第二检验信息的步骤;以及计算在第二检验地点通过自身位置推定所推定出的移动体在地图上的位置和姿势与由第二检验信息表示的移动体在地图上的位置和姿势的差分,并基于差分来验证自身位置推定的精度的验证步骤。
6.在此,检验地点是在移动体位于所述检验地点的情况下,能通过计算机来确定移动体在地图上的位置和姿势的地点。此外,第一检验地点和第二检验地点是多个检验地点中的彼此不同的任意两个检验地点。
7.在上述第一方案中,也可以是,在验证步骤中,在差分成为规定的阈值以上的情况下,针对相同或不同的第一检验地点和第二检验地点的组,返回初始步骤并重复各步骤,在差分成为规定的阈值以上的情况下,并且在重复被进行了规定次数以上的情况下,判定为自身位置推定的精度降低了。
8.在上述第一方案中,也可以是,在验证步骤中,在差分小于规定的阈值的情况下,判定为自身位置推定的精度为正常。
9.本公开的第二方案的自身位置推定系统是进行推定移动体在地图上的位置和姿势的自身位置推定的系统,包括一个或多个处理器。处理器执行:位置确定处理,在移动体位于多个检验地点中的任一个的情况下,确定移动体在地图上的位置和姿势;自身位置推定处理,将通过位置确定处理确定出的移动体在地图上的位置和姿势作为初始值来进行自身位置推定;以及推定精度验证处理,验证通过自身位置推定处理进行的自身位置推定的精度。此外,在推定精度验证处理中,处理器计算由推定精度验证信息表示的移动体在地图上的位置和姿势与由第二检验信息表示的移动体在地图上的位置和姿势的差分,并基于差分来验证自身位置推定的精度。
10.在此,第一检验地点和第二检验地点是多个检验地点中的彼此不同的任意两个检验地点。第一检验信息是在移动体位于第一检验地点时,通过位置确定处理确定的移动体在地图上的位置和姿势的信息。第二检验信息是在移动体位于第二检验地点时,通过位置确定处理确定的移动体在地图上的位置和姿势的信息。推定精度验证信息是在移动体位于第一检验地点时通过自身位置推定处理将第一检验信息作为初始值来开始自身位置推定,并在之后移动体移动至第二检验地点时的、通过自身位置推定处理推定出的移动体在地图上的位置和姿势的信息。
11.在上述第二方案中,也可以是,针对多个相同或不同的第一检验地点和第二检验地点的组分别依次给出推定精度验证信息和第二检验信息。而且,也可以是,在推定精度验证处理中,处理器针对依次获取的推定精度验证信息和第二检验信息,依次判定差分是小于规定的阈值还是成为规定的阈值以上,在判定为差分成为阈值以上的次数是规定次数以上的情况下,判定为自身位置推定的精度降低了。
12.在上述第二方案中,也可以是,处理器在判定为差分小于规定的阈值的情况下,判定为自身位置推定的精度为正常。
13.在上述第二方案中,移动体也可以包括位置确定用外传感器。位置确定用外传感器可以是检测用于确定移动体在地图上的位置和姿势的信息的传感器。
14.在上述第二方案中,自身位置推定系统也可以包括位置确定装置。可以是,位置确定装置是确定移动体的位置和姿势的外部装置,位置确定装置被设置于检验地点。
15.根据本公开,在移动体位于第一检验地点时,将第一检验信息作为初始值来开始自身位置推定。然后,在一边继续自身位置推定一边使移动体移动至第二检验地点之后,基于推定精度验证信息与第二检验信息的差分来验证自身位置推定的精度。由此,能保障自身位置推定的初始值的精度,并适当地验证自身位置推定的精度。
附图说明
16.以下,参照附图,对本发明的示例性实施例的特征、优点以及技术和工业意义进行说明,其中,相同的附图标记表示相同的元件,其中:
17.图1是用于说明第一实施方式的车辆系统的构成的框图。
18.图2是用于说明通过本实施方式的车辆系统实现的自身位置推定系统的框图。
19.图3是表示第一实施方式的车辆系统中的车辆的位置确定的方法的例子的概念
图。
20.图4是表示第一实施方式的车辆系统中的车辆的位置确定的方法的例子的概念图。
21.图5是表示第一实施方式的车辆系统中的车辆的位置确定的方法的例子的概念图。
22.图6是用于说明本实施方式的自身位置推定精度验证方法的概要的概念图。
23.图7是表示本实施方式的自身位置推定精度验证方法的过程的流程图。
24.图8是用于说明第二实施方式的车辆系统的构成的框图。
25.图9是表示图8所示的位置确定装置进行车辆的位置确定的方法的例子的概念图。
26.图10是表示图8所示的位置确定装置进行车辆的位置确定的方法的例子的概念图。
具体实施方式
27.以下,参照附图对本发明的实施方式进行说明。其中,在以下所示的实施方式中提及各要素的个数、数量、量、范围等数值的情况下,除非特别明示的情况、原理上明显确定为该数值的情况,本发明不限定于该提及的数值。此外,就以下所示的实施方式中说明的构造等而言,除非特别明示的情况、原理上明显确定为该构造的情况,在本发明中不一定是必须的。需要说明的是,在各图中对相同或相当的部分标注相同的附图标记,并适当简化乃至省略其重复说明。
28.在本实施方式中说明的自身位置推定精度验证方法和自身位置推定系统涉及车辆、移动机器人等移动体的自身位置推定。特别是,涉及给出进行自主行驶的移动体在执行自主行驶控制时利用的移动体在地图上的位置和姿势的自身位置推定。以下,将作为对象的移动体作为进行自主行驶的车辆来进行说明。
29.1.第一实施方式
30.1-1.车辆系统的构成
31.图1是用于说明第一实施方式的车辆系统10的构成的框图。第一实施方式的车辆系统10包括车辆100和存储装置db。
32.车辆100是能进行自主行驶的自动驾驶车。车辆100具备传感器系统110、hmi装置120、通信装置130、控制装置140、致动系统150。控制装置140以能与传感器系统110、hmi装置120、通信装置130以及致动系统150相互传递信息的方式构成网络。典型的是通过线束相互电连接的车载网络。
33.传感器系统110表示配备于车辆100,检测并输出进行车辆100的控制所需的各种信息的传感器的系统。传感器系统110包括内传感器ins、外传感器oss、位置确定用外传感器pts。
34.内传感器ins是检测行驶状态等车辆100的内部的信息的传感器。内传感器ins例如是检测车辆100的车速的车轮速度传感器、检测车辆100的加速度的加速度传感器、检测车辆100的横摆角速度的角速度传感器等。
35.外传感器oss是检测周围环境(车道、障碍物、先行车等)等车辆100的外部的信息的传感器。例如是毫米波雷达、传感器摄像机、lidar(light detection and ranging:光探
测和测距)等。
36.位置确定用外传感器pts是检测用于确定车辆100在地图上的位置和姿势(以下也称为“位置确定”。)的信息的传感器。位置确定用外传感器pts是与进行车辆100的位置确定的方法相应的适当的传感器。在后文对进行车辆100的位置确定的方法加以叙述。在此,位置确定用外传感器pts可以与外传感器oss相同。在该情况下,基于外传感器oss的信息来进行车辆100的位置确定。
37.hmi装置120是具有以下功能的装置:通过车辆100的操作员等进行操作来对控制装置140给出各种信息(操作信息),此外将与控制装置140所执行的处理相关的信息(处理信息)通知给操作员等。hmi装置120例如是开关、触摸面板显示器、汽车仪表等或它们的组合。
38.通信装置130是通过与车辆100的外部的装置进行通信来进行各种信息(通信信息)的收发的装置。通信装置130例如是连接于互联网等网络,并与网络上的装置进行信息的收发的装置、进行车车间通信、路车间通信的装置、gps(global positioning system:全球定位系统)接收器等、或包括这些装置的装置的系统。通信装置130被配置为至少能从后述的存储装置db获取信息。控制装置140经由通信装置130获取的信息例如是地图信息、通过gps得到的地图上的位置信息、道路交通信息等。
39.控制装置140基于所获取的信息来执行车辆100的控制的处理,并生成控制信号。然后,控制装置140对致动系统150输出控制信号。控制装置140典型的是包括存储器和处理器的ecu(electronic control unit:电子控制单元)。不过,控制装置140也可以是车辆100的外部的装置。存储器包括暂时存储数据的ram(random access memory:随机存取存储器)和存储能由处理器执行的程序、程序的各种数据的rom(read only memory:只读存储器)。控制装置140所获取的信息存储于存储器。处理器从存储器读出程序,并基于从存储器读出的各种数据来执行按照程序的处理。
40.控制装置140包括位置确定处理部ptu、自身位置推定处理部lcu、推定精度验证处理部evu、自主行驶控制处理部adu。
41.位置确定处理部ptu在车辆100位于多个特定的地点(以下也称为“检验地点”。)中的任一个的情况下,基于通过位置确定用外传感器pts得到的检测信息和通过后述的位置确定用地图数据ptd得到的地图信息,执行车辆100的位置确定的处理,并计算确定出的车辆100在地图上的位置和姿势(以下也称为“检验信息”。)。就是说,检验地点是在车辆100位于该检验地点的情况下,能供位置确定处理部ptu进行车辆100的位置确定的地点。位置确定处理部ptu根据车辆100的位置确定的方法来执行适当的处理。在后文对车辆100的位置确定的方法加以叙述。
42.在此,对于通过检验信息给出的车辆100在地图上的位置和姿势,给出与由自身位置推定处理部lcu进行的自身位置推定的结果同样的信息。例如,作为由自身位置推定处理部lcu进行的自身位置推定的结果,设为车辆100在地图上的位置通过二维坐标(xe,ye)给出,车辆100的姿势通过横摆角θe给出。此时,位置确定处理部ptu计算检验信息,该检验信息是将车辆100在地图上的位置作为二维坐标(x,y)给出,并将车辆100的姿势作为横摆角θ给出的信息。
43.自身位置推定处理部lcu基于通过内传感器ins和外传感器oss得到的检测信息和
通过后述的行驶控制用地图数据rnd得到的地图信息来执行车辆100的自身位置推定的处理,并输出自身位置推定的结果。典型的是,自身位置推定处理部lcu将设为已知的车辆100在地图上的位置和姿势作为初始值给出来开始处理,根据车辆100的移动量和车辆100与周围环境之间的位置关系时刻推定车辆100在地图上的位置和姿势。车辆100的移动量根据通过内传感器ins得到的检测信息来计算。车辆100与周围环境之间的位置关系根据通过外传感器oss得到的检测信息和通过自行驶控制用地图数据rnd得到的地图信息来计算。
44.在此,本实施方式的自身位置推定处理部lcu将位置确定处理部ptu所计算的检验信息作为初始值。此外,通过由自身位置推定处理部lcu进行的自身位置推定的结果给出的车辆100在地图上的位置和姿势的自由度没有特别的限定。例如,可以通过二维坐标(xe,ye)给出车辆100在地图上的位置,并通过横摆角θe给出车辆100的姿势,也可以通过三个自由度分别给出车辆100在地图上的位置和姿势。
45.需要说明的是,自身位置推定处理部lcu也可以在进行自身位置推定时进行环境地图的制作。就是说,自身位置推定处理部lcu也可以执行slam(simultaneous localization and mapping:同步定位和建图)的处理。在该情况下,自身位置推定也可以基于通过制作出的环境地图得到的地图信息来进行。环境地图例如是通过lidar检测的点群数据。此外,所制作的环境地图可以存储于控制装置140的存储器,也可以作为行驶控制用地图数据rnd经由通信装置130存储于存储装置db。
46.推定精度验证处理部evu对通过自身位置推定处理部lcu进行的自身位置推定的精度进行验证。推定精度验证处理部evu基于位置确定处理部ptu所计算的检验信息与通过自身位置推定处理部lcu得到的车辆100的自身位置推定结果的差分,对通过自身位置推定处理部lcu进行的自身位置推定的精度进行验证。在后文对推定精度验证处理部evu所执行的处理的详细内容加以叙述。
47.自主行驶控制处理部adu执行车辆100的自主行驶的处理,并生成用于进行自主行驶的控制信号。典型的是,设定到目的地的行驶计划(到目的地的地图上的路线、到达时间等),并基于行驶计划和所获取的信息来生成行驶路线。然后,自主行驶控制处理部adu以车辆100沿行驶路线行驶的方式生成加速、制动、转向的控制信号。在此,基于生成行驶路线时的信息中包含由自身位置推定处理部lcu进行的车辆100的自身位置推定的结果。
48.控制装置140也可以执行其他车辆100的控制的处理。需要说明的是,位置确定处理部ptu、自身位置推定处理部lcu、推定精度验证处理部evu以及自主行驶控制处理部adu或执行其他控制的处理的部分的每一个可以作为一个程序的部分来给出,也可以按各处理或按一组处理通过不同的程序来给出,并由不同的处理器来执行。或者,各处理或一组处理也可以由不同的ecu来执行。在该情况下,控制装置140是由多个ecu构成的系统,各ecu被配置为能以能在处理的执行时获取所需的信息的程度相互传递信息。
49.致动器统150表示按照从控制装置140给出的控制信号进行动作的致动器的系统。致动系统150例如包括驱动发动机(内燃机、电动马达或它们的混合动力等)的致动器、驱动配备于车辆100的制动机构的致动器、驱动车辆100的转向机构的致动器等。致动系统150中所包括的各致动器按照控制信号来进行动作,由此实现由控制装置140进行的车辆100的各种控制。
50.存储装置db是存储各种数据,并输出所存储的数据的信息的装置。典型的是被配
置在网络上的数据库服务器。不过,存储装置db也可以虚拟地配置。存储装置db中存储有行驶控制用地图数据rnd和位置确定用地图数据ptd。
51.行驶控制用地图数据rnd是地物的地图信息的集合,在进行自身位置推定、自主行驶控制或其他行驶控制时被参照。地物的地图信息中至少包含地物在地图上的位置的信息。在此,地物可以包括表示白线等的特征点、通过lidar等得到的检测点。行驶控制用地图数据rnd典型的是点群数据、高精度三维地图数据。或者,也可以包含由自身位置推定处理部lcu制作出的环境地图的信息。
52.位置确定用地图数据ptd是表示用于进行车辆100的位置确定的地图信息的数据,包含在进行位置确定时所参照的地图信息。位置确定用地图数据ptd根据车辆100的位置确定的方法来给出适当的数据。在后文对车辆100的位置确定的方法加以叙述。在此,位置确定用地图数据ptd可以与行驶控制用地图数据rnd相同。在该情况下,在车辆100的位置确定中参照通过行驶控制用地图数据rnd得到的地图信息。
53.需要说明的是,位置确定用地图数据ptd和行驶控制用地图数据rnd也可以存储于控制装置140的存储器。在该情况下,位置确定处理部ptu、自身位置推定处理部lcu以及自主行驶控制处理部adu参照通过存储于控制装置140的存储器的行驶控制用地图数据rnd或位置确定用地图数据ptd得到的地图信息。
54.1-2.自身位置推定系统
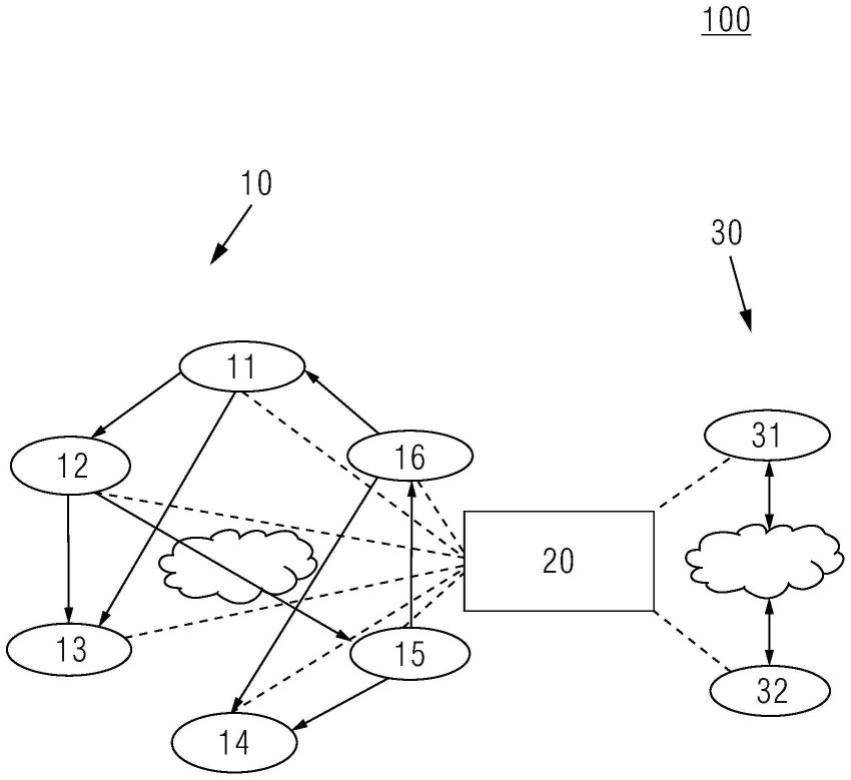
55.图2是用于说明通过第一方案的车辆系统10实现的自身位置推定系统lcs的框图。图2示出了在进行自身位置推定和自身位置推定的精度的验证的情况下的信息的传递。其中,由单点划线表示的箭头示出了仅在进行自身位置推定的精度的验证的情况下发生的信息的传递。此外,在图2中,省略示出传播信息的传递的部分。例如,未图示通信装置130。
56.位置确定处理部ptu基于通过位置确定用外传感器pts得到的检测信息和通过位置确定用地图数据ptd得到的地图信息来计算车辆100的检验信息。然后,位置确定处理部ptu将所计算出的检验信息传递至自身位置推定处理部lcu。在进行自身位置推定的精度的验证的情况下,位置确定处理部ptu也进一步将所计算出的检验信息传递至推定精度验证处理部evu。
57.自身位置推定处理部lcu将从位置确定用外传感器pts获取的检验信息作为初始值,基于通过内传感器ins得到的检测信息、通过外传感器oss得到的检测信息以及通过行驶控制用地图数据rnd得到的地图信息来进行车辆100的自身位置推定。然后,自身位置推定处理部lcu输出自身位置推定的结果。在进行自身位置推定的精度的验证的情况下,自身位置推定处理部lcu向推定精度验证处理部evu传递自身位置推定的结果。
58.在进行自身位置推定的精度的验证的情况下,推定精度验证处理部evu基于从位置确定处理部ptu获取的检验信息与从自身位置推定处理部lcu获取的自身位置推定结果的差分来验证通过自身位置推定处理部lcu进行的自身位置推定的精度。然后,推定精度验证处理部evu输出自身位置推定的精度的验证结果。
59.1-3.车辆的位置确定的方法
60.第一实施方式的车辆系统10在车辆100位于多个检验地点中的任一个的情况下,确定车辆100在地图上的位置和姿势(位置确定)。以下,对第一实施方式的车辆系统10中的车辆100的位置确定的方法进行说明。
61.图3是表示车辆100的位置确定的方法的一个例子的概念图。在图3所示的例子中,在检验地点cp设置有两个地物ft1和ft2。在该例子中,位置确定用地图数据ptd以包含设置于检验地点cp的地物在地图上的位置的信息的方式给出。就是说,两个地物ft1和ft2在地图上的位置的信息包含于位置确定用地图数据ptd。因此,能通过位置确定用外传感器pts检测车辆100与地物ft1和ft2之间的相对位置,由此进行车辆100的位置确定。
62.就是说,位置确定处理部ptu根据从位置确定用地图数据ptd获取的地物ft1和ft2在地图上的位置的信息以及从位置确定用外传感器pts获取的车辆100与地物ft1和ft2之间的相对位置的信息来计算车辆100的检验信息。在该情况下,作为位置确定用外传感器pts,举例示出毫米波雷达、传感器摄像机、lidar等或它们的组合。
63.需要说明的是,也可以在检验地点cp包括三个以上的地物。此外,在检验地点cp所包括的各地物能通过位置确定用外传感器pts相互区分,并且被配置为能从位置确定用地图数据ptd适当地获取对应的地图上的位置信息。例如,对于各地物,配置为具有能通过传感器摄像机的图像识别、lidar来相互区分的形状,或施加色彩、图案。或者是具备能通过毫米波雷达来相互区分的光学反射板(例如,对毫米波的电波的反射率不同的反射板)等。
64.图4是表示车辆100的位置确定的方法的另一个例子的概念图。在图4所示的例子中,在检验地点cp示出了规定车辆100的停车场所的停车框fr,并且在停车框fr附近设置有地物ft。此外,在地物ft标记有能通过位置确定用外传感器pts识别的标识mk。标识mk与表示将车辆100沿停车框fr泊车的情况下的车辆100在地图上的位置和姿势的信息对应。因此,在车辆100沿停车框fr泊车的状态下,位置确定用外传感器pts识别标识mk,由此能通过获取与标识mk对应的地图信息来进行车辆100的位置确定。
65.标识mk例如是二维码等能通过进行识别来获取特定的信息的码。在该情况下,位置确定用外传感器pts是读码器等与标识mk对应的读取传感器。此外,在该情况下,通过标识mk的识别直接获得的信息可以是与车辆100在地图上的位置和姿势的地图信息对应的id。就是说,可以是,位置确定用外传感器pts通过识别标识mk来获取id,并且位置确定处理部ptu从位置确定用地图数据ptd获取与获取到的id对应的地图信息,由此进行车辆100的位置确定。因此,在该情况下,位置确定用地图数据ptd是按每个id给出地图信息的数据。
66.此外,标识mk也可以是能通过传感器摄像机、lidar识别并区分的特定的色彩、图案或能通过毫米波雷达识别并区分的特定的光学反射板。在该情况下,位置确定用外传感器pts是毫米波雷达、传感器摄像机或lidar,与上述同样地进行车辆100的位置确定。
67.而且,也可以是,位置确定用外传感器pts检测停车框fr与车辆100之间的相对位置,位置确定处理部ptu基于检测出的相对位置来校正从标识mk得到的车辆100在地图上的位置和姿势的信息。由此,能进一步提高车辆100的位置确定的精度。在该情况下,位置确定用外传感器pts中包括用于识别标识mk的传感器和能检测停车框fr与车辆100之间的相对位置的传感器(传感器摄像机、lidar等)。不过,标识mk的识别和停车框fr与车辆100之间的相对位置的检测也可以由相同的传感器来进行。
68.图5是表示车辆100的位置确定的方法的另一个例子的概念图。在图5所示的例子中,在检验地点cp示出了规定车辆100的停车场所的停车框fr。此外,位置确定用地图数据ptd中包含表示针对在多个检验地点示出的停车框fr的每一个,将车辆100沿停车框fr泊车的情况下的车辆100在地图上的位置和姿势的信息。
69.在图5所示的例子中,在车辆100沿停车框fr泊车的状态下进行车辆100的位置确定。在进行位置确定时,车辆100通过gps检测地图上的位置。然后,位置确定处理部ptu推定为车辆100在距离通过gps检测到的地图上的位置最近的位置的停车框fr泊车,并进行车辆100的位置确定。就是说,位置确定处理部ptu从位置确定用地图数据ptd获取关于距离通过gps检测到的地图上的位置最近的停车框fr的地图信息,并将获取到的地图信息所示的车辆100在地图上的位置和姿势作为车辆100的检验信息。
70.在此,在位置确定用地图数据ptd中不包含关于与通过gps检测出的地图上的位置足够接近的停车框fr的地图信息的情况下,位置确定处理部ptu可以判断为不能进行位置确定。这例如能通过位置确定用地图数据ptd中所包含的关于停车框fr的每一个的车辆100在地图上的位置的信息与通过gps检测出的地图上的位置的差全部大于规定的阈值来进行判断。此时,位置确定处理部ptu可以经由hmi装置120向车辆100的操作员等通知(显示、声音等)不能进行位置确定。
71.此外,也可以是,位置确定用外传感器pts检测停车框fr与车辆100之间的相对位置,位置确定处理部ptu基于检测出的相对位置来校正从位置确定用地图数据ptd获取的关于停车框fr的地图信息。
72.以上,对车辆100的位置确定的方法的例子进行了说明,但也可以通过其他的方法来进行车辆100的位置确定。
73.1-4.自身位置推定精度验证方法
74.图6是用于说明本实施方式的自身位置推定精度验证方法的概要的概念图。本实施方式的自身位置推定精度验证方法是对通过自身位置推定处理部lcu进行的车辆100的自身位置推定的精度进行验证的方法。该自身位置推定精度验证方法在多个检验地点中的彼此不同的任意两个检验地点进行。在图6中示出了第一检验地点cp1和第二检验地点cp2来作为这两个检验地点。
75.首先,使车辆100移动至第一检验地点cp1(初始步骤)。在移动至第一检验地点cp1后,通过位置确定处理部ptu实施车辆100的位置确定,获取第一检验地点cp1处的车辆100的检验信息(以下也称为“第一检验信息”。)。之后,自身位置推定处理部lcu将第一检验信息作为初始值来开始自身位置推定。
76.接着,一边继续通过自身位置推定处理部lcu进行的自身位置推定一边使车辆100移动至第二检验地点cp2(rt)。在此,车辆100向第二检验地点cp2的移动(rt)可以通过任意的方案来进行。例如,可以通过由自主行驶控制处理部adu进行的自主行驶控制来进行,也可以通过手动驾驶、牵引来进行。
77.在移动至第二检验地点cp2后,通过位置确定处理部ptu实施车辆100的位置确定,获取第二检验地点cp2处的车辆100的检验信息(以下也称为“第二检验信息”。)。然后,推定精度验证处理部evu基于第二检验信息与第二检验地点cp2处的通过自身位置推定处理部lcu得到的自身位置推定结果(以下,也称为“推定精度验证信息”。)的差分来验证自身位置推定的精度(验证步骤)。
78.在此,在未通过推定精度验证处理部evu给出验证结果的情况下,针对相同或不同的第一检验地点cp1和第二检验地点cp2的组,再次重复同样的过程。例如,更换设为第一检验地点cp1和第二检验地点cp2的检验地点,并再次重复同样的过程。
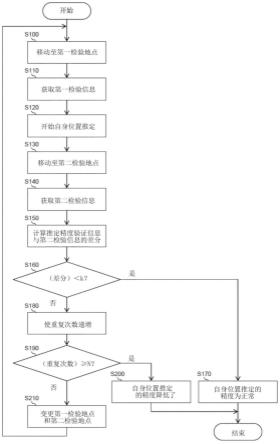
79.图7是表示本实施方式的自身位置推定精度验证方法的过程的流程图。按照图7所示的流程图,更详细地对本实施方式的自身位置推定精度验证方法进行说明。
80.在步骤s100(初始步骤)中,使车辆100移动至第一检验地点cp1。第一检验地点cp1可以是多个检验地点中的任意的地点。此外,车辆100向第一检验地点cp1的移动可以通过任意的方案来进行。在步骤s100之后,过程进入步骤s110。
81.在步骤s110中,获取第一检验信息。第一检验信息通过位置确定处理部ptu来计算。在步骤s110之后,过程进入步骤s120。
82.在步骤s120中,将第一检验信息作为初始值来开始通过自身位置推定处理部lcu进行的自身位置推定。在步骤s120之后,过程进入步骤s130。
83.在步骤s130中,一边继续通过自身位置推定处理部lcu进行的自身位置推定一边使车辆100移动至第二检验地点cp2。只要是与第一检验地点cp1不同的地点即可,第二检验地点cp2可以是多个检验地点中的任意的地点。此外,车辆100向第二检验地点cp2的移动也可以通过任意的方案来进行。在步骤s130之后,过程进入步骤s140。
84.在步骤s140中,获取第二检验信息。第二检验信息通过位置确定处理部ptu来计算。在步骤s140之后,过程进入步骤s150。在此,从步骤s150在步骤s200所示的过程(验证步骤)是通过推定精度验证处理部evu执行的处理。
85.在步骤s150中,推定精度验证处理部evu从位置确定处理部ptu和自身位置推定处理部lcu获取推定精度验证信息和第二检验信息,并计算由推定精度验证信息表示的车辆100在地图上的位置和姿势与由第二检验信息表示的车辆100在地图上的位置和姿势的差分。
86.在此,差分例如如下这样计算。现在,作为第二检验信息,设为车辆100在地图上的位置通过二维坐标(x2,y2)给出,并且车辆100的姿势通过横摆角θ2给出。此外,作为推定精度验证信息,设为车辆100在地图上的位置通过二维坐标(xe,ye)给出,车辆100的姿势通过横摆角θe给出。此时,通过以下的算式(1)来计算差分。
87.[数式1]
[0088]
|x2-xe|z |y2-ye|z |θ2-θe|z…
(1)
[0089]
同样地,也可以针对车辆100在地图上的位置和姿势分别计算差分。在步骤s150之后,过程进入步骤s160。
[0090]
在步骤s160中,推定精度验证处理部evu判定在步骤s150中计算出的差分是否小于规定的阈值k。在此,阈值k是预先赋予至程序的值。这例如通过应用本实施方式的车辆系统10的车辆100的车辆适配(vehicle compatibility)等,在实验中确定为最佳值。
[0091]
在差分小于阈值k的情况下(步骤s160;是),推定精度验证处理部evu判定为通过自身位置推定处理部lcu进行的自身位置推定的精度为正常(步骤s170),过程结束。在差分成为规定的阈值k以上的情况下(步骤s160;否),过程进入步骤s180。
[0092]
在步骤s180中,推定精度验证处理部evu进行重复次数的递增。在此,重复次数在图7所示的过程开始时被初始化(例如将重复次数设为0。)。在步骤s180之后,过程进入步骤s190。
[0093]
在步骤s190中,推定精度验证处理部evu判定重复次数是否成为规定次数n以上。在此,规定次数n是预先赋予至程序的值。
[0094]
在重复次数成为规定次数n以上的情况下(步骤s190;是),推定精度验证处理部evu判定为通过自身位置推定处理部lcu进行的自身位置推定的精度降低了(步骤s200),过程结束。在重复次数小于规定次数n的情况下(步骤s190;否),推定精度验证处理部evu不给出验证结果,过程进入步骤s210。
[0095]
在步骤s210中,变更第一检验地点cp1和第二检验地点cp2。例如,更换设为第一检验地点cp1和第二检验地点cp2的检验地点。在步骤s210之后,返回步骤s100并重复过程。在此,不一定需要步骤s210的过程。就是说,也可以针对相同的第一检验地点和第二检验地点的组再次重复过程。
[0096]
以上,对自身位置推定精度验证方法进行了说明。也可以根据通过自身位置推定精度验证方法得到的验证结果来给出处理的开始、对应的判断。例如,在推定精度验证处理部evu判定为自身位置推定的精度为正常的情况下(步骤s170),开始通过自主行驶控制处理部adu进行的自主行驶控制的处理。作为其他的例子,是在推定精度验证处理部evu判定为自身位置推定的精度降低了的情况下(步骤s200),实施自身位置推定的装置(传感器系统110、控制装置140、致动系统150等)的故障确认等。
[0097]
此外,即使在推定精度验证处理部evu判定为自身位置推定的精度为正常的情况下(步骤s170),在重复进行了至少一次以上的情况下,也可以进行与重复次数相应的处理的执行、对应。例如,经由hmi装置120进行提醒操作员等注意的通知。或者是将进行了重复记录于控制装置140的存储器等。
[0098]
2.第二实施方式
[0099]
以下,对第二实施方式进行说明。需要说明的是,对在前述的内容中已经进行了说明的事项适当进行省略。
[0100]
2-1.车辆系统的构成
[0101]
在第二实施方式中,通过外部装置进行车辆100的位置确定。图8是用于说明第二实施方式的车辆系统10的构成的框图。如图8所示,在第二实施方式中,车辆100的传感器系统110不包括位置确定用外传感器pts,此外,控制装置140不包括位置确定处理部ptu。另一方面,第二实施方式的车辆系统10包括位置确定装置200。
[0102]
位置确定装置200是进行车辆100的位置确定的外部装置。位置确定装置200分别被设置于多个检验地点cp。或者,位置确定装置200也可以是进行车辆100的位置确定时所准备的特定的装置。位置确定装置200在车辆100位于各检验地点的情况下,进行车辆100的位置确定,并计算检验信息。而且,如图8的单点划线所示,车辆100的检验信息经由通信装置130被传递至车辆100。在此,位置确定装置200与车辆100之间的通信可以是任意的方式。例如,可以是通过电波进行的通信,也可以是经由互联网等网络的通信。
[0103]
车辆100的检验信息可以经由hmi装置120被传递至车辆100。在该情况下,通过hmi装置120的操作来给出由位置确定装置200计算出的检验信息,由此该检验信息作为hmi装置120的操作信息被传递至控制装置140。
[0104]
位置确定装置200具备位置确定用外传感器pts和信息处理装置240。
[0105]
位置确定用外传感器pts是与位置确定装置200进行车辆100的位置确定的方法相应的适当的传感器。在后文对位置确定装置200进行车辆100的位置确定的方法加以叙述。
[0106]
信息处理装置240典型的是包括存储器和处理器的计算机。信息处理装置240存储
位置确定用地图数据ptd。此外,信息处理装置240包括位置确定处理部ptu。位置确定处理部ptu基于通过位置确定用外传感器pts得到的检测信息和通过位置确定用地图数据ptd得到的地图信息来计算车辆100的检验信息。位置确定处理部ptu根据位置确定装置200进行车辆100的位置确定的方法来执行适当的处理。在后文对位置确定装置200进行车辆100的位置确定的方法加以叙述。
[0107]
需要说明的是,通过第二实施方式的车辆系统10实现的自身位置推定系统lcs与图2所示的系统是等同的。
[0108]
2-2.车辆的位置确定的方法
[0109]
以下,对在第二实施方式的车辆系统10中位置确定装置200进行车辆100的位置确定的方法进行说明。
[0110]
图9是表示位置确定装置200进行车辆100的位置确定的方法的一个例子的概念图。在图9所示的例子中,示出了配置于检验地点cp的位置确定装置200的位置确定用外传感器pts。在该例子中,位置确定用地图数据ptd以包含位置确定用外传感器pts在地图上的位置的信息的方式给出。因此,能通过位置确定用外传感器pts来检测位置确定用外传感器pts与车辆100之间的相对位置,由此确定车辆100在地图上的位置。此外,能通过位置确定用外传感器pts来检测车辆100相对于位置确定用外传感器pts的姿势,由此确定车辆100的姿势。
[0111]
就是说,位置确定处理部ptu根据从位置确定用地图数据ptd获取的位置确定用外传感器pts在地图上的位置的信息和从位置确定用外传感器pts获取的位置确定用外传感器pts的检测信息来计算车辆100的检验信息。在该情况下,作为位置确定用外传感器pts,举例示出毫米波雷达、传感器摄像机、lidar等或者它们的组合。
[0112]
在此,车辆100可以被配置为能适当地进行通过位置确定用外传感器pts进行的检测。例如,在位置确定用外传感器pts包括毫米波雷达的情况下,车辆100可以具备光学反射板。
[0113]
图10是表示位置确定装置200进行车辆100的位置确定的方法的另一个例子的概念图。在图10所示的例子中,示出了配置于检验地点cp的位置确定装置200的位置确定用外传感器pts。此外,在检验地点cp示出了规定车辆100的停车场所的停车框fr。在该例子中,位置确定用地图数据ptd以包含停车框fr在地图上的位置的信息的方式给出。因此,能通过位置确定用外传感器pts来检测停车框fr与车辆100的相对位置,由此进行车辆100的位置确定。
[0114]
就是说,位置确定处理部ptu根据从位置确定用地图数据ptd获取的停车框fr在地图上的位置的信息和从位置确定用外传感器pts获取的停车框fr与车辆100的相对位置的信息来计算车辆100的检验信息。在该情况下,作为位置确定用外传感器pts,举例示出毫米波雷达、传感器摄像机、lidar等或它们的组合。
[0115]
以上,对位置确定装置200进行车辆100的位置确定的方法的例子进行了说明,但位置确定装置200也可以通过其他的方法来进行车辆100的位置确定。
[0116]
2-3.自身位置推定系统
[0117]
由第二实施方式的车辆系统10执行的自身位置推定精度验证方法与在第一实施方式中通过图6和图7进行了说明的方法是等同的。不过,在第二实施方式的车辆系统10中,
在图7所示的流程图的步骤s110和步骤s140中,通过位置确定装置200来计算第一检验信息和第二检验信息。
[0118]
3.效果
[0119]
如以上说明的那样,根据本实施方式的自身位置推定精度验证方法和自身位置推定系统lcs,在车辆100位于第一检验地点cp1的状态下,将第一检验信息作为初始值来开始自身位置推定。然后,一边继续通过自身位置推定处理部lcu进行的自身位置推定一边使车辆100移动至第二检验地点,并在之后基于推定精度验证信息与第二检验信息的差分来验证通过自身位置推定处理部lcu进行的自身位置推定的精度。
[0120]
由此,能根据在任一检验地点cp确定出的车辆100在地图上的位置和姿势(第一检验信息)来给出自身位置推定的初始值,由此保障自身位置推定的初始值的精度,并适当地验证自身位置推定的精度。
[0121]
而且,在差分成为规定的阈值k以上的情况下,重复进行自身位置推定的精度的验证,基于重复次数成为规定次数n以上而判定为自身位置推定的精度降低了。由此,能减少对自身位置推定的结果的概率性的波动的判定错误。
[0122]
需要说明的是,在本实施方式中,以车辆100为对象对自身位置推定精度验证方法和自身位置推定系统lcs进行了说明,但也能通过适当地应用于其他的移动体来获得同样的效果。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。