1.本发明涉及医用耗材技术领域,具体涉及一种混合力源的上肢假肢系统。
背景技术:
2.目前医疗领域所使用的假肢,基本分为索控式假肢与肌电假肢两种,该两种假肢有着不同的使用方式以及优缺点,现将该两种假肢的具体使用情况以及各自的优缺点进行如下具体分析:索控式上肢假肢为利用自身力源操纵的功能性上肢假肢,又简称为机械手,它作为普通的常用上肢假肢,是为满足患者从事日常生活和轻微劳动的基本需要而设计的,具有手的外形,并能完成抓取、握取、勾取等基本动作,机械手是以截肢者的肩部运动为力源,通过肩背带带动牵引索来控制手指的开闭及肘关节的屈伸,索控式假肢相对与肌电手,价格较为便宜,且不容易损坏,患者掌握起来也较为轻易,只需要几个简单的肩部动作带动牵引手,就能实现肘部和手部的活动。
3.然而上述索控式假肢随着临床工作的不断深入,其逐渐出现了一些弊端,且该弊端的出现,导致传统的索控式假肢无法满足目前医疗领域的高标准使用需求,现将传统索控式假肢所存在的弊端进行如下具体说明:患者在实际使用过程中,其不能随意控制握力的大小,手的精细功能差,只能作为辅助手,达不到肌电手所能完成的日常生活中更复杂、精细的动作。
4.肌电手是提供肌肉信号来控制假肢,因此反应迅速,可快速满足患者的动作需求,在装配肌电手之前,患者需在康复中心进行肌电测试,测试患者的哪一个肌肉信号是控制抓、哪一个肌肉信号是控制张开的,在进行了肌电测试之后,再在假肢上进行信号量身匹配,以求达到信号精准控制假肢的效果,一般患者通过康复训练后,可以轻松地驾驭上肢假肢正确的抓握物体,对日常生活产生很大的帮助。
5.肌电手的最大特点在于:驱动省力,去掉了机械手的肩背带,可获得较大的手指握力;控制灵活,不受肢位的影响,可在任意位置开手,因此,肌电手较之索控上肢假肢来说,代偿功能好、操纵便利。但也存在着造价较高,电极易产生噪音及受电池寿命影响等缺点。
6.且肌电假肢在具体临床使用过程中,由于上臂和肘离断截肢后要求的动作多,而残肢表面的肌电信号来源少,纯肌电假肢装配困难很增加。
7.由此可见,在本领域对假肢的具体选择过程中,其无论是选择索控式假肢还是肌电假肢,其均存在实质性的不足,若能将上述两种假肢的优点相结合,且摒弃上述两种假肢所存在的些许不足,则成为了目前本领域迫切所需要的。
技术实现要素:
8.有鉴于此,本发明的目的在于提供一种混合力源的上肢假肢系统,以解决现有技术传统索控模块或肌电模块在使用过程中所存在的些许不足,缺少将该两种假肢相结合的方案。
9.本发明通过以下技术方案实现:一种混合力源的上肢假肢系统,包括索控模块、肌电模块和设置于肌电模块端部并与其相联动的手部假体,所述索控模块用于代偿上臂功能,所述肌电模块用于代偿前臂功能,所述索控模块的底端联动设置有肘关节模块,并通过该肘关节模块与所述肌电模块相接;所述手部假体包括手掌部和手指部,该手指部包括五个手指模型,分别为大拇指模型、食指模型、中指模型、无名指模型和小拇指模型;通过索控模块、肘关节模块、肌电模块、手掌部和手指部的连贯配合,用于代偿患者上肢功能;该假肢系统还包括对手部假体进行防水的防水组件以及便于触屏操作的触屏组件。
10.进一步,所述防水组件包括套设于手部假体外侧的塑胶手套,以及配设于肌电模块外部用于对塑胶手套进行锁紧的锁紧件。
11.进一步,所述锁紧件包括套设于肌电模块外部的套管,所述肌电模块的外表面设置有外螺纹,且该套管的内壁设置有与外螺纹相匹配的内螺纹,所述套管的底端配设有与其底部边缘相适配的两个夹体,所述套管的底部设置有与两个所述夹体相接的球铰,所述夹体背离球铰的一端延伸设置有延伸部,当两个所述夹体转动,其二者端部相靠近时,延伸部呈上下对称分布,两个所述延伸部的厚度方向贯穿开设有螺纹孔,且该螺纹孔上螺纹配设有锁紧螺栓。
12.进一步,两个所述夹体相对的一侧,并沿夹体的边缘设置有气囊,且两个气囊上设置有连通管,其中一个所述气囊上设置有与其内部相通的输气内管,所述输气内管的外部套设有输气外管,且该输气外管与充气囊体相连通。
13.进一步,所述套管的外侧设置有微型抽气泵,且该微型抽气泵的抽气端连通有抽气软管,所述塑胶手套的表面开设有与其内部相通的通孔,当需使用微型抽气泵对塑胶手套内部气体进行抽气时,抽气软管至少部分经由该通孔延伸至塑胶手套的内部。
14.进一步,所述大拇指模型包括设置于手掌部上的防护套,且该防护套为顶端敞口的中空结构,所述触屏组件包括设置于防护套内部的触摸杆,且该触摸杆至少部分经由该防护套的顶端敞口延伸至防护套的外部,所述触摸杆的外部以可拆卸的方式套设有电容屏手套。
15.进一步,所述防护套的外表面设置有螺纹,所述防护套上螺纹配设有保护帽。
16.进一步,所述保护帽上设置有旋转部。
17.本发明的有益效果在于:该混合力源的上肢假肢系统,通过索控模块、肌电模块、肘关节模块和手部假体的配合使用,当使用本装置时,肌电模块代偿前臂功能,索控模块代偿上臂功能,从而解决了在单独使用传统索控模块时,其精细功能差,无法完成更精准操作的问题,也解决了患者在单独使用传统肌电模块时,由于患者残肢表面的肌电信号来源少,而导致肌电模块使用不便的问题,且纯肌电模块装配相对困难,本技术技术方案巧妙的将肌电模块和索控模块二者的优点相结合,采用肌电信号和牵引索控制两种方式相结合控制上肢假肢,利用肌电信号控制手部假体的工作,利用肩背带拉动牵引索控制肘关节模块的屈伸,本技术技术方案使得手部假体活动自如,肘关节模块采用牵引索控制大大节省了电能,也增加了肘关节的机械强度,较之完全由传统肌电信号控制的假肢,减少了一对控制肘关节的电极,更便于操纵,简化了结构,降低了成本,而手部假体操作精准性要求较高,则使用肌电信号假肢加以
控制,从而满足患者的日常生活自理。
18.本技术技术方案更是利用防水组件使得手部假体具有防水功能,从而可避免患者在日常的生活自理行为中,手部假体避免触碰水,而导致手部假体损坏,极大限度的提高了本技术技术方案在实际使用过程中的适用性与安全性。
19.本技术技术方案更是通过设置有触屏组件,可满足患者在使用本假肢时,依然能够自由使用数码产品,从而提高了患者在手臂残损时,依然能够与正常人一样,使用数码产品,提高患者的生活质量以及生活乐趣,避免患者因使用传统的假肢,而出现无法使用数码产品的情况。
20.简而言之,本技术技术方案利用连贯而又紧凑的结构,巧妙的解决了在单独使用传统索控模块或肌电模块时所存在的些许不足,更提高了患者在使用假肢时,能够避免水对手部假体造成损坏,此外,更是解决了患者在使用传统假肢时,其不便使用数码产品的问题。
21.本发明的其他优点、目标和特征在某种程度上将在随后的说明书中进行阐述,并且在某种程度上,基于对下文的考察研究对本领域技术人员而言将是显而易见的,或者可以从本发明的实践中得到教导。本发明的目标和其他优点可以通过下面的说明书来实现和获得。
22.附图说明
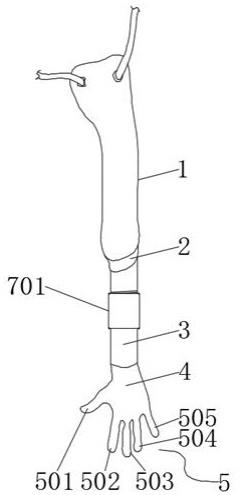
23.图1为本发明的正视图;图2为图1中,套管拆卸后示意图;图3为本发明的塑胶手套示意图;图4为本发明的套管局部立体示意图i;图5为本发明的套管局部立体示意图ii;图6为图4中a的局部放大图;图7为本发明的延伸部使用状态示意图i;图8为本发明的延伸部使用状态示意图ii;图9为本发明的延伸部爆炸示意图;图10为本发明的防护套局部剖视图;图11为本发明的防护套局部立体示意图i;图12为本发明的防护套局部立体示意图ii。
24.图中:1、索控模块;2、肘关节模块;3、肌电模块;4、手掌部;5、手指部;501、大拇指模型;502、食指模型;503、中指模型;504、无名指模型;505、小拇指模型;6、塑胶手套;7、锁紧件;701、套管;702、夹体;8、延伸部;9、锁紧螺栓;10、螺纹孔;11、气囊;12、连通管;13、输气内管;14、输气外管;15、充气囊体;16、微型抽气泵;17、抽气软管;18、防护套;19、旋转部;20、保护帽;21、触摸杆;22、电容屏手套。
具体实施方式
25.为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例
中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。通常在此处附图中描述和示出的本发明实施例的组件可以以各种不同的配置来布置和设计。
26.因此,以下对在附图中提供的本发明的实施例的详细描述并非旨在限制要求保护的本发明的范围,而是仅仅表示本发明的选定实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
27.应注意到:相似的标号和字母在下面的附图中表示类似项,因此,一旦某一项在一个附图中被定义,则在随后的附图中不需要对其进行进一步定义和解释。
28.在本发明的上述描述中,需要说明的是,术语“一侧”、“另一侧”等指示的方位或位置关系为基于附图所示的方位或位置关系,或者是该发明产品使用时惯常摆放的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,术语“第一”、“第二”等仅用于区分描述,而不能理解为指示或暗示相对重要性。
29.此外,术语“相同”等术语并不表示要求部件绝对相同,而是可以存在微小的差异。术语“垂直”仅仅是指部件之间的位置关系相对“平行”而言更加垂直,并不是表示该结构一定要完全垂直,而是可以稍微倾斜。
30.请参阅图1-12,本发明提供一种技术方案:一种混合力源的上肢假肢系统,包括索控模块1、肌电模块3和设置于肌电模块3端部并与其相联动的手部假体,索控模块1用于代偿上臂功能,肌电模块3用于代偿前臂功能,索控模块1的底端联动设置有肘关节模块2,并通过该肘关节模块2与肌电模块3相接;手部假体包括手掌部4和手指部5,该手指部5包括五个手指模型,分别为大拇指模型501、食指模型502、中指模型503、无名指模型504和小拇指模型505;通过索控模块1、肘关节模块2、肌电模块3、手掌部4和手指部5的连贯配合,用于代偿患者上肢功能;该假肢系统还包括对手部假体进行防水的防水组件以及便于触屏操作的触屏组件;此处需要说明的是,本技术技术方案所提及的索控模块和肌电模块的使用方法、安装方法及生产规则,为本领域现有技术,故本技术对此不再重复赘述,而肌电模块如何对手部假体进行控制,此亦为本领域现有技术;本装置在使用时,索控模块对肘关节模块进行操控,以控制肘部的活动,并将肘关节与肌电模块连接为一体,肌电模块通过肌电信号,用以控制手掌部、大拇指模型501、食指模型502、中指模型503、无名指模型504和小拇指模型505进行活动,从而将肌电模块的灵活性与精准性跟索控模块相结合,且索控模块在使用工程中,其结构更为简单,降低了生产、制造成本,更减少了控制肘关节的电极;本技术技术方案为发明人根据多年临床实践经验,针对于患者单独使用肌电模块或索控模块所存在的弊端,而提出的极具创造性的方案,其志在将二者相结合,容纳二者的技术优点,摒弃二者的部分技术缺陷,从实际生产、加工,到临床实践,本方案皆存在突出性的实质效果与工作有效性,发明人曾思考过,使用绷带绑缚患者肩部,以牵引肌电模块,从而代偿患者上臂,然此废弃方案存在使用缺陷及美观性较差的问题,造成患者的心理排斥感,故经过多次研究、实验,总结出符合实际工作所需的该方案,发明人志在先保护,后转
化,为本领域的发展进步,奉上力所能及的贡献;本技术技术方案所提及的防水组件,其目的是在患者佩戴本假肢后,当需进行洗菜、洗衣服等日常生活自理劳动时,防水组件可有效对手部假体进行防水(手部假体通过肌电模块上的肌电信号予以控制,轻易浸泡水中,容易造成肌电模块以下的手部假体等结构损坏,且手部假体上的手指模型,其加工精细、存在多种连贯性结构,经常泡水,将缩短其使用寿命);而当患者在佩戴完本假肢,需使用数码产品(目前的数码产品多为触控屏)等物件时,其若仅仅使用目前传统的假肢手部,其在具体操作过程中,则无法触摸数码产品的屏幕,因此无法对数码产品进行操控,此处患者可使用触屏组件,则可有效的解决此类问题,使得患者在残肢断臂后,佩戴本装置,依然可对数码产品进行使用,此点对目前本领域失去手臂的患者来说,具有绝对性的辅助意义及生活改善意义,使得此类患者依然可融入目前信息化时代的生活当中。
31.本实施例中:防水组件包括套设于手部假体外侧的塑胶手套6,以及配设于肌电模块3外部用于对塑胶手套6进行锁紧的锁紧件7,当需洗菜或洗衣服时,可先将塑胶手套套入至手部假体的外侧,此时配以锁紧件,可对该塑胶手套进行锁紧,以避免塑胶手套随意松动,此时患者便可在装配完本方案的假肢后,在其肌电模块正常使用的前提下,依然可保障其防水性,以便于患者进行日常的生活自理活动;本实施例最重要的是,此类防水组件的使用,并没有影响肌电模块及手部假体的正常工作,肌电模块及手部假体依然保留有效的工作能力,且利用肌电模块的灵活性,此时在清洗衣物和洗菜时,则依然能够灵活便捷。
32.本实施例中:锁紧件7包括套设于肌电模块3外部的套管701,肌电模块3的外表面设置有外螺纹,且该套管701的内壁设置有与外螺纹相匹配的内螺纹,套管701的底端配设有与其底部边缘相适配的两个夹体702,套管701的底部设置有与两个夹体702相接的球铰,夹体702背离球铰的一端延伸设置有延伸部8,当两个夹体702转动,其二者端部相靠近时,延伸部8呈上下对称分布,两个延伸部8的厚度方向贯穿开设有螺纹孔10,且该螺纹孔10上螺纹配设有锁紧螺栓9;当塑胶手套套入至手部假体的外部后,套管转动(套管与肌电模块外壁螺纹连接)向下,直至套管对塑胶手套呈封套状,随后调节两个夹体,使其与塑胶手套紧贴,此时两个延伸部上下重合,随后拧紧锁紧螺栓,从而使得夹体在固定后,其可有效对塑胶手套进行夹紧,以避免塑胶手套在实际使用过程中,随意松动,此处可参考附图7-9。
33.本实施例中:两个夹体702相对的一侧,并沿夹体702的边缘设置有气囊11,且两个气囊11上设置有连通管12,其中一个气囊11上设置有与其内部相通的输气内管13,输气内管13的外部套设有输气外管14,且该输气外管14与充气囊体15相连通;此处可参考附图4-6,本实施例进一步的限定气囊,其目的是使用气囊代替夹体与塑胶手套相接触,其目的是利用气囊的柔软性,避免夹体直接作用于塑胶手套上,其力度过大对塑胶手套造成损坏;气囊在使用过程中,首先将输气内管伸入至输气外管的内部,随后手动捏紧输气外管与输气内管二者相接处,随后按压充气囊体,使其经由输气外管及输气内管对气囊进行注气,当注气完毕后,拔出输气外管,并在输气内管的端口处塞入塞体,以避免气体外流;
当夹体在使用过程中,本实施例还可利用气囊的注气膨胀性,用以调节其与塑胶手套的夹持力度。
34.本实施例中:套管701的外侧设置有微型抽气泵16,且该微型抽气泵16的抽气端连通有抽气软管17,塑胶手套6的表面开设有与其内部相通的通孔,当需使用微型抽气泵16对塑胶手套6内部气体进行抽气时,抽气软管17至少部分经由该通孔延伸至塑胶手套6的内部;本实施例所提及的微型抽气泵为本领域现有技术,其如何使用、如何加工,其已是本领域成熟的现有技术,故本技术对此无需过多赘述,本实施例所提及的微型抽气泵其可为型号vn-c4的微型抽气泵;本实施例当锁紧件已对塑胶手套锁紧后,抽气软管伸入至塑胶手套的通孔内,此时微型抽气泵开始工作,可将塑胶手套内部气体抽出,此时则可使得塑胶手套紧贴于手部假体的外部,随后抽出抽气软管,使用塞体塞入至通孔的内侧即可;本实施例还可在通孔处连通设置有抽气内管,并在抽气内管上设置有单向阀,此时将抽气内管伸入至抽气软管的内部,微型抽气泵抽气结束后,关闭单向阀拔出抽气内管即可,此相对于使用塞体,则更进一步的避免塑胶手套内部的气体随意泄漏;本实施例其目的是,避免手部假体在活动时,塑胶手套并未紧贴于手部假体时,其存在缝隙与空间,从而对患者的洗菜或洗衣服工作造成影响。
35.本实施例中:大拇指模型501包括设置于手掌部4上的防护套18,且该防护套18为顶端敞口的中空结构,触屏组件包括设置于防护套18内部的触摸杆21,且该触摸杆21至少部分经由该防护套18的顶端敞口延伸至防护套18的外部,触摸杆21的外部以可拆卸的方式套设有电容屏手套22,此处进一步限定电容屏手套的安装方式,其目的是在其出现损坏时,可随即对其进行更换,可拆卸的安装方式可为魔术贴刺的粘合方式,也可是在电容屏手套的底端,沿其边缘设置有弹性带,利用弹性带的弹性,驱使电容屏手套绷紧于触摸杆上;防护套18的外表面设置有螺纹,防护套18上螺纹配设有保护帽20;保护帽20上设置有旋转部19,此处设置有旋转部,其目的是便于对保护帽进行转动;当患者需使用数码产品时,其可以拧开保护帽,使得触摸杆暴露于防护套的外部,随后在肌电模块控制手部假体活动时,触摸杆代替大拇指模型进行活动,与触控屏进行接触,其电容屏手套便可直接与数码产品的触控屏相接触,从而达到对数码产品操控的目的,当使用完毕后,再次将保护帽旋转套设于防护套上,即可对触摸杆及电容屏手套进行有效防尘防护。
36.最后说明的是,以上实施例仅用以说明本发明的技术方案而非限制,尽管参照较佳实施例对本发明进行了详细说明,本领域的普通技术人员应当理解,可以对本发明的技术方案进行修改或者等同替换,而不脱离本发明技术方案的宗旨和范围,其均应涵盖在本发明的权利要求范围当中。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
