1.本发明涉及遥感监测领域,特别是指一种海岸线自动化识别方法和装置。
背景技术:
2.海岸线是海洋和陆地的分界线,海岸线的时序动态变化是海岸线自然状态的位置演变、海岸开发活动等综合因素影响下的位置表征,通常与海水侵蚀、河口淤积、填海活动、围海养殖、海水盐田、港口码头、城镇扩张等开发活动密切相关。准确获取海岸线的空间位置和类型,是保护管理自然海岸、合理利用人工岸线的重要基础数据。
3.遥感凭借短周期观测、覆盖范围广、空间分辨率及尺度信息丰富、光谱信息量多等优势,在大尺度空间范围的海岸线信息提取方面具有强大的优势。利用遥感技术获取海岸线空间分布与类型属性信息,掌握海岸线的空间位置形态及长期变化,在海岸安全、生态保护、环境治理、海岸规划等方面具有重要的作用。
4.现有技术中利用遥感影像获取海岸线空间分布位置的方法主要包括人工目视解译方法和光谱特征结合人工目视解译的半自动提取方法。人工目视解译方法借助地理信息系统分析软件,叠加卫星遥感影像,沿着海陆边界手动勾绘海岸线的空间端点、结点、拐点、断点等点位,最后连接成线得到海岸线空间分布矢量,在点位之间通过判读海岸线所依附的地物类型,分岸段赋予海岸线类型属性信息。
5.人工目视解译方法主要存在如下缺点:海岸线等勾绘工作量巨大,耗时较长、更新相对缓慢;同时需要专业人员具有丰富的岸线位置界定和类型判别知识,复杂情形下岸线位置和属性判别因人而异,受不同解译人员的影响,容易造成海岸线的“双眼皮”误差;判读勾绘海岸线时,一个区域通常采用一景影像,会忽略潮汐条件对海岸线空间位置的影响,后期修正需要大量的潮汐校正工作;同时手动勾绘法容易产生遗漏、端点不重合、岸线形态不平滑等多种错误,导致人工勾绘岸线的精度达不到管理需求。
6.光谱特征结合人工目视解译的半自动提取方法主要包括单波段分割法、水体指数法、边缘检测法、图像分类法、面向对象法、极化方法等。这些方法通常通过单景影像地光谱特征结合人工目视解译提取海岸线,该海岸线是单景影像成像时刻的瞬时水边线。而实际海岸线受潮汐的影响,其位置随潮水的涨落而变动,处于不断变化中。单景影像提取的瞬时水边线未考虑潮汐条件、潮汐校正以及全国各区域潮汐类型的差异等,往往不能直接将瞬时水边线作为海岸线使用,需要大量的后期潮汐校正工作。并且不同成像时刻的单景影像得到的瞬时水边线是不同的,受不同遥感影像的影响,容易造成海岸线的“双眼皮”误差。
技术实现要素:
7.为解决上述技术问题,本发明提供一种海岸线自动化识别方法和装置,本发明能够准确、快速、自动化提取海岸线的空间位置和属性,为自然岸线的保护与管理提供基础数据支撑。
8.本发明提供技术方案如下:
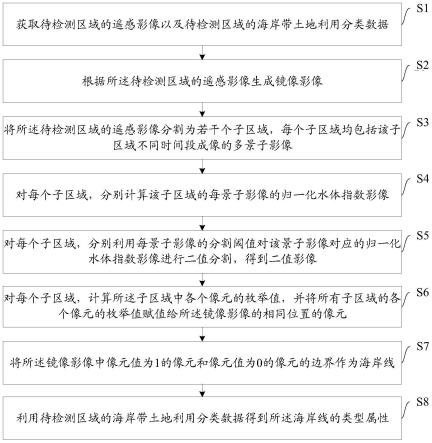
9.一种海岸线自动化识别方法,所述方法包括:
10.s1:获取待检测区域的遥感影像以及待检测区域的海岸带土地利用分类数据;
11.其中,所述待检测区域的遥感影像包括该待检测区域不同时间段成像的多景遥感影像;
12.s2:根据所述待检测区域的遥感影像生成镜像影像;
13.其中,所述镜像影像的影像四至范围、影像宽度、影像高度、像元大小、坐标系均与所述待检测区域的遥感影像相同,所述镜像影像的各个像元的初始值为空;
14.s3:将所述待检测区域的遥感影像分割为若干个子区域,每个子区域均包括该子区域不同时间段成像的多景子影像;
15.s4:对每个子区域,分别计算该子区域的每景子影像的归一化水体指数影像;
16.其中,所述归一化水体指数影像在像元(x,y)处的像元值为对应的子影像在该像元(x,y)处的归一化水体指数ndwi;
17.ndwi=(p(green)-p(nir))/(p(green) p(nir));
18.p(green)和p(nir)分别为所述子影像在像元(x,y)处的绿波段光谱值和近红外波段光谱值;
19.s5:对每个子区域,分别利用每景子影像的分割阈值对该景子影像对应的归一化水体指数影像进行二值分割,得到二值影像;
20.其中,若所述归一化水体指数影像在像元(x,y)处的像元值大于对应子影像的分割阈值,则所述二值影像在该像元(x,y)处的像元值为1,否则为0;
21.s6:对每个子区域,计算所述子区域中各个像元的枚举值,并将所有子区域的各个像元的枚举值赋值给所述镜像影像的相同位置的像元;
22.当时,m
pixel
=1
23.当时,m
pixel
=0
24.其中,m
pixel
表示像元(x,y)的枚举值,n
pixel=1
表示一个子区域中所有二值影像在像元(x,y)处的像元值取值为1的数量,n
pixel=0
表示一个子区域中所有二值影像在像元(x,y)处的像元值取值为0的数量,n
pixel
=n
pixel=1
n
pixel=0
,p为设定的判读阈值系数;
25.s7:将所述镜像影像中像元值为1的像元和像元值为0的像元的边界作为海岸线;
26.s8:利用待检测区域的海岸带土地利用分类数据得到所述海岸线的类型属性。
27.进一步的,所述s8包括:
28.s81:将所述海岸线与所述海岸带土地利用分类数据相交,得到一系列的交点;
29.s82:在每个交点处,过所述交点做垂直于所述海岸线的线段,并且所述线段在所述海岸线两侧的长度分别为第一长度和第二长度;
30.s83:对每一个交点,以该交点的线段作为矩形的一条边,过该交点的下一个交点做闭合矩形,得到一系列的闭合矩形区域;
31.s84:对每个闭合矩形区域,根据所述闭合矩形区域内的海岸带土地利用分类数据确定所述闭合矩形区域的类型属性;
32.s85:将所述闭合矩形区域的类型属性作为所述闭合矩形区域上的两个所述交点
之间的一段海岸线的类型属性,得到所述海岸线的类型属性。
33.进一步的,所述s84包括:
34.s841:对每个闭合矩形区域,取该闭合矩形区域与所述海岸带土地利用分类数据的交面,并获取所述交面在所述海岸带土地利用分类数据上的土地利用类型集合;
35.s842:若闭合矩形区域的土地利用类型集合包括“砂滩或沙滩”、“滩涂或湿地或围涂”、“红树林或海草床或珊瑚礁”、“河流”,则将该闭合矩形区域的类型属性分别设置为“砂质岸线”、“泥质岸线”、“生物岸线”、“河口岸线”;
36.或者,若闭合矩形区域的土地利用类型集合包括未经人为活动影响的土地利用类型,则将该闭合矩形区域的类型属性设置为“自然岸线”;
37.s843:若闭合矩形区域的土地利用类型集合包括“草地或林地或裸岩”,并且所述“草地或林地或裸岩”在所述闭合矩形区域中的占比大于第一比值,则将该闭合矩形区域的类型属性设置为“基岩岸线”,或者将该闭合矩形区域的类型属性设置为“自然岸线”;
38.s844:若闭合矩形区域的土地利用类型集合包括“旱地或水田”、“居住地或海岸围堤”、“码头或港口或渔港”、“交通用地”、“养殖”、“盐田”,并且所述“旱地或水田”、“居住地或海岸围堤”、“码头或港口或渔港”、“交通用地”、“养殖”、“盐田”在所述闭合矩形区域中的占比大于第二比值,则将该闭合矩形区域的类型属性分别设置为“农田围堤”、“建设围堤”、“码头围堤”、“交通围堤”、“养殖围堤”、“盐田围堤”;
39.或者,若闭合矩形区域的土地利用类型集合包括经过人为活动影响的土地利用类型,则将该闭合矩形区域的类型属性设置为“人工岸线”。
40.进一步的,所述s85包括:
41.s851:对每一个闭合矩形区域,将所述闭合矩形区域上的两个所述交点之间的一段海岸线与所述闭合矩形区域关联;
42.s852:对每一个闭合矩形区域,将所述闭合矩形区域的类型属性复制到与所述闭合矩形区域关联的一段海岸线。
43.进一步的,对任意一景子影像,其分割阈值通过如下方法确定:
44.s51:将所述分割阈值的取值在归一化水体指数的取值区间上按照设定步长遍历每一个值;
45.s52:对每个分割阈值的取值,将所述子影像对应的归一化水体指数影像的各个像元的像元值与所述分割阈值的取值进行比较,将所述归一化水体指数影像的像元值大于所述分割阈值的取值的像元分类到第一区域,否则分类到第二区域;
46.s53:对每个分割阈值的取值,计算所述分割阈值的取值对应的第一区域和第二区域的差别g;
47.g=w0w1(μ
0-μ1)2[0048][0049][0050]
其中,n0和n1分别为所述第一区域和第二区域的像元数,μ0为所述第一区域的所有
像元的像元值的平均值,μ1为所述第二区域的所有像元的像元值的平均值;
[0051]
s54:找出所有分割阈值的取值对应的所述差别的最大值,所述最大值对应的分割阈值的取值即为所述子影像的分割阈值。
[0052]
进一步的,所述s1包括:
[0053]
s11:获取卫星遥感影像、待检测区域范围矢量和海岸带土地利用分类数据;
[0054]
s12:当所述卫星遥感影像、待检测区域范围矢量和海岸带土地利用分类数据的投影坐标不一致时,进行使投影坐标一致的坐标变换;
[0055]
s13:利用待检测区域范围矢量对所述卫星遥感影像进行裁剪,得到待检测区域的遥感影像。
[0056]
进一步的,所述s7包括:
[0057]
s71:将所述镜像影像中像元值为1的像元合并为第一对象,将所述镜像影像中像元值为0的像元合并为第二对象;
[0058]
s72:将所述第一对象和第二对象的边界作为所述海岸线。
[0059]
进一步的,所述方法还包括:
[0060]
s9:对所述海岸线进行平滑处理和拓扑检查;
[0061]
s10:对所述海岸线的地理空间位置、长度和各段海岸线的类型属性进行统计。
[0062]
一种海岸线自动化识别装置,所述装置包括:
[0063]
数据获取模块,用于获取待检测区域的遥感影像以及待检测区域的海岸带土地利用分类数据;
[0064]
其中,所述待检测区域的遥感影像包括该待检测区域不同时间段成像的多景遥感影像;
[0065]
镜像影像生成模块,用于根据所述待检测区域的遥感影像生成镜像影像;
[0066]
其中,所述镜像影像的影像四至范围、影像宽度、影像高度、像元大小、坐标系均与所述待检测区域的遥感影像相同,所述镜像影像的各个像元的初始值为空;
[0067]
影像分割模块,用于将所述待检测区域的遥感影像分割为若干个子区域,每个子区域均包括该子区域不同时间段成像的多景子影像;
[0068]
水体指数计算模块,用于对每个子区域,分别计算该子区域的每景子影像的归一化水体指数影像;
[0069]
其中,所述归一化水体指数影像在像元(x,y)处的像元值为对应的子影像在该像元(x,y)处的归一化水体指数ndwi;
[0070]
ndwi=(p(green)-p(nir))/(p(green) p(nir));
[0071]
p(green)和p(nir)分别为所述子影像在像元(x,y)处的绿波段光谱值和近红外波段光谱值;
[0072]
二值分割模块,用于对每个子区域,分别利用每景子影像的分割阈值对该景子影像对应的归一化水体指数影像进行二值分割,得到二值影像;
[0073]
其中,若所述归一化水体指数影像在像元(x,y)处的像元值大于对应子影像的分割阈值,则所述二值影像在该像元(x,y)处的像元值为1,否则为0;
[0074]
镜像影像赋值模块,用于对每个子区域,计算所述子区域中各个像元的枚举值,并将所有子区域的各个像元的枚举值赋值给所述镜像影像的相同位置的像元;
[0075]
当时,m
pixel
=1
[0076]
当时,m
pixel
=0
[0077]
其中,m
pixel
表示像元(x,y)的枚举值,n
pixel=1
表示一个子区域中所有二值影像在像元(x,y)处的像元值取值为1的数量,n
pixel=0
表示一个子区域中所有二值影像在像元(x,y)处的像元值取值为0的数量,n
pixel
=n
pixel=1
n
pixel=0
,p为设定的判读阈值系数;
[0078]
海岸线确定模块,用于将所述镜像影像中像元值为1的像元和像元值为0的像元的边界作为海岸线;
[0079]
海岸线类型属性确定模块,用于利用待检测区域的海岸带土地利用分类数据得到所述海岸线的类型属性。
[0080]
进一步的,所述海岸线类型属性确定模块包括:
[0081]
数据相交单元,用于将所述海岸线与所述海岸带土地利用分类数据相交,得到一系列的交点;
[0082]
线段确定单元,用于在每个交点处,过所述交点做垂直于所述海岸线的线段,并且所述线段在所述海岸线两侧的长度分别为第一长度和第二长度;
[0083]
闭合矩形区域确定单元,用于对每一个交点,以该交点的线段作为矩形的一条边,过该交点的下一个交点做闭合矩形,得到一系列的闭合矩形区域;
[0084]
闭合矩形区域类型属性确定单元,用于对每个闭合矩形区域,根据所述闭合矩形区域内的海岸带土地利用分类数据确定所述闭合矩形区域的类型属性;
[0085]
海岸线类型属性确定单元,用于将所述闭合矩形区域的类型属性作为所述闭合矩形区域上的两个所述交点之间的一段海岸线的类型属性,得到所述海岸线的类型属性。
[0086]
本发明具有以下有益效果:
[0087]
本发明针对常规人工识别和勾绘方法的耗费人力多、精度得不到保证、效率低的问题,提出了融合多景遥感影像信息层及镜像影像提取海岸线的方法,并利用土地利用数据划分海岸线结点,判断海岸线类型属性。本发明是一种适应性较强的海岸线提取算法,解决了在各种影像成像条件下的海岸线空间位置提取和属性更新。利用多时相影像识别海岸线空间位置,解决了常规单一遥感影像受潮汐影响导致海岸线位置不确定、精度低、类型属性难以区分等缺陷;同时实现了岸线类型属性的自动化研判,提高了海岸线自动化解译的精度和时间效率。本发明能够准确、快速、自动化提取海岸线的空间位置和属性,为自然岸线的保护与管理提供基础数据支撑,通过分析本发明提取的海岸线空间位置和类型属性的变化,可以满足海岸线生态破坏监管、自然岸线保有率核算、海岸工程监管、海岸线保护与管理等需求,在自然岸线保护及监督管理等方面具有较好的应用前景。
附图说明
[0088]
图1为本发明的海岸线自动化识别方法的流程图;
[0089]
图2为检测区域的遥感影像及其分割为子区域的示意图;
[0090]
图3为镜像影像的示意图;
[0091]
图4为一个子区域的多景归一化水体指数影像的示意图;
[0092]
图5为归一化水体指数影像二值分割得到二值化影像的示意图;
[0093]
图6为镜像影像的赋值示意图;
[0094]
图7为海岸线类型属性确定过程的示意图;
[0095]
图8为海岸线提取结果示意图;
[0096]
图9为本发明的海岸线自动化识别装置的示意图。
具体实施方式
[0097]
为使本发明要解决的技术问题、技术方案和优点更加清楚,下面将结合附图及具体实施例进行详细描述。
[0098]
实施例1:
[0099]
本发明实施例提供一种海岸线自动化识别方法,如图1所示,所述方法包括:
[0100]
s1:获取待检测区域的遥感影像以及待检测区域的海岸带土地利用分类数据;
[0101]
其中,所述待检测区域的遥感影像包括该待检测区域不同时间段成像的多景遥感影像。
[0102]
在其中一个示例中,本步骤的具体实现方式可以包括:
[0103]
s11:获取卫星遥感影像、待检测区域范围矢量和海岸带土地利用分类数据。
[0104]
该卫星遥感影像既可以为原始影像,也可以为经过辐射定标、大气校正、几何校正以及其他影像增强方法处理后的高级别影像。获取卫星遥感影像时,同时还获取其基本参数信息,例如空间尺度(分辨率)、波段数量、光谱范围、投影坐标、非成像区值等,卫星遥感影像一般至少包含“red(红)、green(率)、blue(蓝)、near infrared(近红外)”4个光谱波段。
[0105]
海岸带的待检测区域一般为矢量格式,即待检测区域范围矢量,其附带有相关的矢量信息。
[0106]
海岸带土地利用分类数据通常包含class1
…
classn多种土地利用类型。
[0107]
s12:当所述卫星遥感影像、待检测区域范围矢量和海岸带土地利用分类数据的投影坐标不一致时,进行使投影坐标一致的坐标变换。
[0108]
若投影坐标一致,则做坐标转换处理。坐标变换的方法可以采用本领域技术人员可知的各种方法,本发明对此不作限定。
[0109]
s13:利用待检测区域范围矢量对所述卫星遥感影像进行裁剪,得到待检测区域的遥感影像。
[0110]
若整景卫星遥感影像均为待检测区域,则依据s11中获得的卫星遥感影像的基本参数信息去除非成像区域,或将非成像区域归为无效区域。
[0111]
s2:根据所述待检测区域的遥感影像生成镜像影像。
[0112]
本步骤根据待检测区域,生成镜像影像,所述镜像影像的影像四至范围、影像宽度、影像高度、像元大小、坐标系均与所述待检测区域的遥感影像相同,所述镜像影像的各个像元的初始值设置为空。
[0113]
s3:将所述待检测区域的遥感影像分割为若干个子区域,每个子区域均包括该子区域不同时间段成像的多景子影像。
[0114]
本步骤可以根据s11中的基本参数信息(平面范围、成像宽幅等)将待检测区域的
遥感影像分割为{子区域1
…
子区域i
…
子区域n},i=1,2,
…
,n,分块时,一般按照有重叠分块的方式进行。每个子区域中包含该子区域中多个时间段成像的卫星影像(即所述子影像),子区域内的多景卫星影像可表示为同一卫星行列号下不同时间成像的卫星影像集合。每个子区域的多景子影像的集合为{子影像1
…
子影像j
…
子影像m},j=1,2,
…
,m。
[0115]
s4:对每个子区域,分别计算该子区域的每景子影像的归一化水体指数影像;
[0116]
其中,所述归一化水体指数影像在像元(x,y)处的像元值为对应的子影像在该像元(x,y)处的ndwi(normalized difference water index,归一化水体指数);
[0117]
ndwi=(p(green)-p(nir))/(p(green) p(nir));
[0118]
p(green)和p(nir)分别为所述子影像在像元(x,y)处的绿波段光谱值和近红外波段光谱值。
[0119]
每个子区域均包括m景子影像,每景子影像计算得到一个归一化水体指数影像,一个子区域的归一化水体指数影像的集合为{归一化水体指数影像1
…
归一化水体指数影像j
…
归一化水体指数影像m},j=1,2,
…
,m。
[0120]
s5:对每个子区域,分别利用每景子影像的分割阈值对该景子影像对应的归一化水体指数影像进行二值分割,得到二值影像;
[0121]
其中,若所述归一化水体指数影像在像元(x,y)处的像元值大于对应子影像的分割阈值,则所述二值影像在该像元(x,y)处的像元值为1,否则为0。
[0122]
一个子区域的每景子影像j均设置一个对应的分割阈值tj,一个子区域的分割阈值的集合为{t1
…
tj
…
tm},通过子影像j的分割阈值tj对子影像j对应的归一化水体指数影像j进行二值分割。
[0123]
分割阈值tj是归一化水体指数影像j上海洋(或水体,下同)与陆地(或非水体,下同)的分界阈值,通过分割阈值tj对归一化水体指数影像j的逐像元进行判断,进行像元级别的海洋与陆地类别分类。具体的,将归一化水体指数影像j大于分割阈值tj的像元分为海洋,其像元值设置为1,否则将像元分为陆地,其像元值设置为0,得到二值影像。
[0124]
一个子区域的每景归一化水体指数影像j均二值分割后得到一个二值影像,一个子区域的二值影像的集合为{二值影像1
…
二值影像j
…
二值影像m},j=1,2,
…
,m。
[0125]
现有技术是单一影像的海陆分割阈值选取,由于影响海岸线位置精度的因素较多,易产生海岸线数据不连续、伪边缘等不足和条件限制,需要加上后期的修正工作,严重制约了海岸线的检测精度和速度。为解决上述问题,本发明对多景影像分别设置分割阈值进行分割,综合考虑了多时相的遥感影像确定海岸线的空间位置,使其更加准确。
[0126]
每景子影像的分割阈值可以根据经验设定,也可以根据子影像本身的影像特性确定,示例性的,对任意一景子影像,其分割阈值可以通过如下方法确定:
[0127]
s51:将分割阈值的取值在归一化水体指数的取值区间上按照设定步长遍历每一个值。
[0128]
归一化水体指数的取值区间为[0,1],可以以0.01为步长,在[0,1]上遍历每一个值。
[0129]
s52:对每个分割阈值的取值,将所述子影像对应的归一化水体指数影像的各个像元的像元值与所述分割阈值的取值进行比较,将所述归一化水体指数影像的像元值大于所述分割阈值的取值的像元分类到第一区域(即海洋区域),否则分类到第二区域(即陆地区
域)。
[0130]
s53:对每个分割阈值的取值,计算所述分割阈值的取值对应的第一区域和第二区域的差别g;
[0131]
g=w0w1(μ
0-μ1)2[0132][0133][0134]
其中,n0和n1分别为所述第一区域和第二区域的像元数,μ0为所述第一区域的所有像元的像元值的平均值,μ1为所述第二区域的所有像元的像元值的平均值。
[0135]
s54:找出所有分割阈值的取值对应的所述差别的最大值,所述最大值对应的分割阈值的取值即为所述子影像的分割阈值。
[0136]
本发明通过每景子影像对应的归一化水体指数影像自适应计算其分割阈值,计算的每个分割阈值是最适应该子影像的,分割阈值的取值使得海洋区域和陆地区域的差别最大,海洋区域和陆地区域的区分度最大,使得分割得到的海洋区域和陆地区域更准确,提高了海岸线的准确性。
[0137]
s6:对每个子区域,计算所述子区域中各个像元的枚举值,并将所有子区域的各个像元的枚举值赋值给所述镜像影像的相同位置的像元;
[0138]
当时,m
pixel
=1
[0139]
当时,m
pixel
=0
[0140]
其中,m
pixel
表示像元(x,y)的枚举值,n
pixel=1
表示一个子区域中所有二值影像在像元(x,y)处的像元值取值为1的数量,n
pixel=0
表示一个子区域中所有二值影像在像元(x,y)处的像元值取值为0的数量,n
pixel
=n
pixel=1
n
pixel=0
;p为设定的判读阈值系数,表示占总像元的百分比,例如可以取值为10%。
[0141]
一个子区域包括m景二值影像,对一个子区域的坐标为(x,y)的像元,该同一坐标(x,y)在m景二值影像上有m个像元值,即m景二值影像在同一坐标(x,y)处有m个像元值,通过这m个像元值计算坐标(x,y)的像元的枚举值。计算公式如上,其中,m=n
pixel
=n
pixel=1
n
pixel=0
。
[0142]
对一个子区域,计算得到坐标(x,y)的像元的枚举值后,将该枚举值赋值给镜像影像的相同坐标位置(x,y)的像元,所有子区域按照同样的方法操作,完成对镜像影像的所有像元的赋值。
[0143]
完成赋值后,镜像影像坐标(x,y)处的像元值即为多景二值影像坐标(x,y)处的像元值的统计值。而由前述,二值影像的像元值1、0分别代表海洋和陆地,因此镜像影像坐标(x,y)处的像元值1、0代表了多景子影像坐标(x,y)处的海洋和陆地的统计值。
[0144]
s7:将所述镜像影像中像元值为1的像元和像元值为0的像元的边界作为海岸线。
[0145]
镜像影像坐标的像元值1、0代表了多景子影像的海洋和陆地的统计值,海洋1和陆
地0的边界即为海岸线。
[0146]
本发明计算多景影像的ndwi,生成海洋和陆地分割的多景二值影像,通过多景二值影像的相同位置的像元值统计后赋值给镜像影像,通过镜像影像确定海岸线。本发明综合考虑了多时相的遥感影像确定海岸线的空间位置,解决了常规单一遥感影像因受潮汐影响而导致海岸线位置不确定、提取精度低的问题,不需要后期潮汐校正工作。
[0147]
在其中一个示例中,本步骤的具体实现方式可以包括:
[0148]
s71:将所述镜像影像中像元值为1的像元合并为第一对象,将所述镜像影像中像元值为0的像元合并为第二对象。
[0149]
s72:将所述第一对象和第二对象的边界作为所述海岸线。
[0150]
所述的第一对象即为海洋区域,第二对象即为陆地区域,海洋区域和陆地区域的边界即为海岸线。
[0151]
s8:利用待检测区域的海岸带土地利用分类数据得到所述海岸线的类型属性。
[0152]
待检测区域的海岸带土地利用分类数据包括了待检测区域的海岸带的土地利用类型,根据土地利用类型即可确定海岸线的类型属性。
[0153]
在其中一个示例中,本步骤的具体实现方式可以包括:
[0154]
s81:将所述海岸线与所述海岸带土地利用分类数据相交,得到一系列的交点。
[0155]
假设交点的数量为k个,交点的集合可以表示为{q1,q2
…
qk},各个交点作为海岸线的分段结点。
[0156]
s82:在每个交点处,过所述交点做垂直于所述海岸线的线段,并且所述线段在所述海岸线两侧的长度分别为第一长度l1和第二长度l2。
[0157]
每个交点做一条线段,共k条线段,k条线段组成的集合可以表示为{l1,l2
…
lk}。每条线段共2个端点,{l1,l2
…
lk}的端点的集合可以表示为{(q1_a、q1_b)、((q2_a、q2_b))
…
(qk_a、qk_b)}。l1和l2的数值可以根据需要确定。
[0158]
s83:对每一个交点,以该交点的线段作为矩形的一条边,过该交点的下一个交点做闭合矩形,得到一系列的闭合矩形区域。
[0159]
例如,从第一个交点q1开始,以线段l1为矩形的一条边,分别在线段l1的端点(q1_a、q1_b)处做垂直于线段l1的直线,得到直线1和直线2,并过第二个交点q2做平行于线段l1的直线,得到直线3,线段l1、直线1、直线2和直线3组成的封闭矩形区域即为第一个闭合矩形区域,记为area1。
[0160]
然后对第二个交点重复进行上述过程,得到第二个闭合矩形区域,记为area2,以此类推。对于非闭环形海岸线,k个交点一共得到k-1个闭合矩形区域(因为最后一个交点无法再与下一个交点做闭合矩形区域,所以共有k-1个闭合矩形区域),其集合记为{area1、area2
…
areak-1}。
[0161]
特殊情况下,若为海岛等闭环海岸线,则可以生成k个闭合矩形区域,最后一个闭合矩形区域为第k个交点和第一个交点做闭合矩形,其集合记为{area1、area2
…
areak}。
[0162]
s84:对每个闭合矩形区域,根据所述闭合矩形区域内的海岸带土地利用分类数据确定所述闭合矩形区域的类型属性。
[0163]
在每个闭合矩形区域中,包含了海岸带土地利用分类数据中的若干个土地利用类型,根据闭合矩形区域中包含的这些土地利用类型即可确定该闭合矩形区域的类型属性。
[0164]
在其中一个示例中,本步骤的具体实现方式可以包括:
[0165]
s841:对每个闭合矩形区域,取该闭合矩形区域与所述海岸带土地利用分类数据的交面,并获取所述交面在所述海岸带土地利用分类数据上的土地利用类型集合。
[0166]
每个闭合矩形区域的土地利用类型集合为土地利用类型{class1,class2
…
classn}中的部分或全部,土地利用类型{class1,class2
…
classn}与类型属性{type1,type2
…
typen}相对应。
[0167]
s842:若闭合矩形区域的土地利用类型集合包括“砂滩或沙滩”、“滩涂或湿地或围涂”、“红树林或海草床或珊瑚礁”、“河流”,则将该闭合矩形区域的类型属性分别设置为“砂质岸线”、“泥质岸线”、“生物岸线”、“河口岸线”。
[0168]
或者,若闭合矩形区域的土地利用类型集合包括未经人为活动影响的土地利用类型,则将该闭合矩形区域的类型属性设置为“自然岸线”。
[0169]
本步骤用于直接赋予类型属性,若土地利用类型集合包括上述的土地利用类型class,则直接将相应的类型属性type赋值给闭合矩形区域。或者,若闭合矩形区域的土地利用类型集合包括未经人为活动影响的土地利用类型,包括但不限于上述“砂质岸线”、“泥质岸线”、“生物岸线”、“河口岸线”均为“自然岸线”,可以直接将其类型属性type统一设置为“自然岸线”。
[0170]
s843:若闭合矩形区域的土地利用类型集合包括“草地或林地或裸岩”,并且所述“草地或林地或裸岩”在所述闭合矩形区域中的占比大于第一比值ratio1,则将该闭合矩形区域的类型属性设置为“基岩岸线”,或者将该闭合矩形区域的类型属性设置为“自然岸线”。
[0171]
s844:若闭合矩形区域的土地利用类型集合包括“旱地或水田”、“居住地或海岸围堤”、“码头或港口或渔港”、“交通用地”、“养殖”、“盐田”,并且所述“旱地或水田”、“居住地或海岸围堤”、“码头或港口或渔港”、“交通用地”、“养殖”、“盐田”在所述闭合矩形区域中的占比大于第二比值ratio2,则将该闭合矩形区域的类型属性分别设置为“农田围堤”、“建设围堤”、“码头围堤”、“交通围堤”、“养殖围堤”、“盐田围堤”。
[0172]
或者,若闭合矩形区域的土地利用类型集合包括经过人为活动影响的土地利用类型,包括但不限于上述的旱地或水田”、“居住地或海岸围堤”、“码头或港口或渔港”、“交通用地”、“养殖”、“盐田”等,可以直接将其类型属性type统一设置为“人工岸线”。
[0173]
步骤s843-s844先判断闭合矩形区域中各个土地利用类型class1,class2
…
classn的占比,然后根据占比确定闭合矩形区域的类型属性type。由于上述“基岩岸线”为“自然岸线”,因此也可以将其类型属性type设置为“自然岸线”。由于上述“农田围堤”、“建设围堤”、“码头围堤”、“交通围堤”、“养殖围堤”、“盐田围堤”均为“人工岸线”,因此也可以将类型属性type统一设置为“人工岸线”。
[0174]
其中,依据海岸带土地利用分类的类型class,前述的“林地”包括但不限制于“落叶阔叶林、针阔混交林、常绿针叶灌木林、常绿阔叶灌木林、落叶阔叶灌木林、常绿针叶林、灌木园地、灌木绿地、常绿阔叶林、落叶阔叶林、乔木园地、乔木绿地、”;“湿地”包括但不限制于“森林湿地、灌丛湿地”,“草地”包括但不限制于“草甸、草丛、草本绿地、草本湿地”。
[0175]
s85:将所述闭合矩形区域的类型属性作为所述闭合矩形区域上的两个所述交点之间的一段海岸线的类型属性,得到所述海岸线的类型属性。
[0176]
每个闭合矩形区域分别对应两个交点之间的一段海岸线,{area1、area2
…
areak-1}分别对应{(q1,q2)、(q2,q3)
…
(qk-1,pk)}之间的一段海岸线,将各段海岸线的类型属性设置为其对应的闭合矩形区域的类型属性,完成整个海岸线类型属性的确定。
[0177]
在其中一个示例中,本步骤的具体实现方式可以包括:
[0178]
s851:对每一个闭合矩形区域,将所述闭合矩形区域上的两个所述交点之间的一段海岸线与所述闭合矩形区域关联。
[0179]
本步骤中,取{(q1,q2)、(q2,q3)
…
(qk-1,pk)}之间的一段海岸线与对应的闭合矩形区域{area1、area2
…
areak-1}进行关联。
[0180]
s852:对每一个闭合矩形区域,将所述闭合矩形区域的类型属性复制到与所述闭合矩形区域关联的一段海岸线。
[0181]
示例性的,将闭合矩形区域area1的类型属性type复制到(q1,q2)之间的一段海岸线,以此类推,直至完成每一段海岸线的类型属性的设置,得到包含空间位置信息与类型属性信息的海岸线矢量数据。
[0182]
作为本发明的一种改进,本发明还可以包括:
[0183]
s9:对所述海岸线进行平滑处理和拓扑检查。
[0184]
海岸线多为锯齿形状,为减少海岸线长度、形态误差,对海岸线进行平滑处理。
[0185]
海岸线不会有重叠、交叉的现象,并且海岸线端点为2个。因此可以设置海岸线重叠、交叉、端点》2等拓扑规则,对海岸线进行拓扑检查,修正海岸线的拓扑错误。
[0186]
s10:对所述海岸线的地理空间位置、长度和各段海岸线的类型属性进行统计。
[0187]
本步骤在s11获取的投影坐标下,计算海岸线的长度并更新海岸线的地理空间位置、各段海岸线的类型等字段,获取最终的海岸线数据。
[0188]
本发明获取待检测区的卫星遥感影像并获取其空间尺度、波段数量、光谱范围、投影坐标、非成像区值等关键信息,并生成覆盖待检测区的镜像影像;计算每景遥感影像的ndwi水体特征信息层,通过设置水体的分割阈值识别每个ndwi水体特征信息层上的海洋和陆地信息,通过多个海洋和陆地判别信息叠加运算后赋值给镜像影像并生成海岸线;将海岸线与海岸线土地利用分类数据叠加后生成分割结点,然后在相邻结点处生成用于判别海岸线类型属性的闭合矩形区域,通过闭合矩形区域内海岸带土地利用数据生成海岸线类型属性信息,并赋值给海岸线相邻结点间岸线段;最终经过边界平滑、拓扑处理、字段属性更新后获取包含地理空间位置、长度和类型属性等信息的海岸线矢量数据。
[0189]
本发明具有如下有益效果:
[0190]
1、利用同一个区域不同成像时间的多景遥感影像覆盖生成镜像影像,表示该区域的影像平面覆盖情况,减少提取海岸线时不同单景遥感影像的海岸线“双眼皮”误差。
[0191]
2、计算多景影像的ndwi,生成海洋和陆地分割的多景二值影像,通过多景二值影像的相同位置的像元值统计后赋值给镜像影像,通过镜像影像确定海岸线;综合考虑了多时相的遥感影像确定海岸线的空间位置,解决了常规单一遥感影像因受潮汐影响而导致海岸线位置不确定、提取精度低和复杂性高的问题,提取的海岸线更准确,最能接近海岸线“平均大潮高潮线”的位置定义,且不需要后期潮汐校正工作。
[0192]
3、利用海岸线与海岸带土地利用分类数据,获取岸线类型分割结点,依据结点建立用于海岸线类型属性判别的闭合矩形区域,依据土地利用类型判断并添加海岸线的类型
属性。减少了海岸线分割结点的选取时间,同时减少了海岸线类型属性判读的错判、漏判,提高了时间效率,提高了海岸线空间位置和属性特征的解译精度和效率。
[0193]
4、经过边界平滑、拓扑处理,提高了海岸线的准确性,然后通过字段属性更新后获取包含地理空间位置和类型属性信息的海岸线矢量数据。
[0194]
5、自适应计算每景子影像的分割阈值,使得分割得到的海洋区域和陆地区域更准确,提高了海岸线的准确性。
[0195]
下面通过一个具体的示例对本发明进行详细说明:
[0196]
1、获取卫星遥感卫星影像、海岸线待检测区域范围矢量,海岸带土地利用分类数据。其中卫星遥感影像至少包括空间尺度(分辨率)、波段数量、光谱范围、投影坐标、非成像区值),如下:
[0197]“空间尺度spatial resolution=2m”、“波段数量bands=4”、“band1=p(blue),band2=p(green),band3=p(red),band4=p(nir)”,“投影坐标spatialreference=wgs84 utm51n”,“非成像区值dataignorevalue=0”等信息。
[0198]
2、对卫星遥感影像进行矢量裁剪获取待检测区域(即待提取海岸线的目标区域)的遥感影像,并分割成若干个子区域,生成镜像影像。
[0199]
待检测区域的遥感影像及其子区域如图2所示,生成的镜像影像如图3所示,两者的影像四至范围、影像宽度width、影像高度height、像元大小、坐标系等均相同。
[0200]
3、计算每个子区域中的多景子影像的ndwi影像,并将其分为海洋和陆地两类,陆地赋值为0,海洋赋值为1,得到二值影像。
[0201]
图4为多景子影像的ndwi影像,图5为每景ndwi影像赋值为陆地和海洋得到的二值影像。
[0202]
4、根据枚举值的计算公式,遍历计算镜像影像中的{子区域1
…
子区域n}中每个像元的代表海洋和陆地的像元值,如图6所示。
[0203]
5、依据镜像影像的海洋与陆地的像元值,取其分界线作为海岸线空间分布位置,如图6所示。
[0204]
6、用海岸带土地利用分类数据与海岸线相交,得到的交点{q1,q2,q3,q4}作为海岸线的分段结点,如图7所示。
[0205]
7、在海岸线相邻分段结点上生成用于判断海岸线类型属性的闭合矩形区域{area1、area2、area3},如图7所示。
[0206]
8、在闭合矩形区域内判断的闭合矩形区域类型属性,并将其值赋值给对应的一段海岸线,如图7所示。
[0207]
9、对获取的包含空间位置和属性信息的海岸线经过边界平滑、拓扑处理、字段属性更新后获取包含地理空间位置和类型属性信息的海岸线矢量数据,如图8所示。
[0208]
10、海岸线数据的空间长度、类型属性等统计分析。
[0209]
综上所述,本发明针对常规人工识别和勾绘方法的耗费人力多、精度得不到保证、效率低的问题,提出了融合多景遥感影像信息层及镜像影像提取海岸线的方法,并利用土地利用数据划分海岸线结点,判断海岸线类型属性。本发明是一种适应性较强的海岸线提取算法,解决了在各种影像成像条件下的海岸线空间位置提取和属性更新。利用多时相影像识别海岸线空间位置,解决了常规单一遥感影像受潮汐影响导致海岸线位置不确定、精
度低、类型属性难以区分等缺陷;同时实现了岸线类型属性的自动化研判,提高了海岸线自动化解译的精度和时间效率。本发明能够准确、快速、自动化提取海岸线的空间位置和属性,为自然岸线的保护与管理提供基础数据支撑,通过分析本发明提取的海岸线空间位置和类型属性的变化,可以满足海岸线生态破坏监管、自然岸线保有率核算、海岸工程监管、海岸线保护与管理等需求,在自然岸线保护及监督管理等方面具有较好的应用前景。
[0210]
实施例2:
[0211]
本发明实施例提供一种海岸线自动化识别装置,如图9所示,所述装置包括:
[0212]
数据获取模块1,用于获取待检测区域的遥感影像以及待检测区域的海岸带土地利用分类数据;
[0213]
其中,所述待检测区域的遥感影像包括该待检测区域不同时间段成像的多景遥感影像。
[0214]
镜像影像生成模块2,用于根据所述待检测区域的遥感影像生成镜像影像;
[0215]
其中,所述镜像影像的影像四至范围、影像宽度、影像高度、像元大小、坐标系均与所述待检测区域的遥感影像相同,所述镜像影像的各个像元的初始值为空。
[0216]
影像分割模块3,用于将所述待检测区域的遥感影像分割为若干个子区域,每个子区域均包括该子区域不同时间段成像的多景子影像。
[0217]
水体指数计算模块4,用于对每个子区域,分别计算该子区域的每景子影像的归一化水体指数影像;
[0218]
其中,所述归一化水体指数影像在像元(x,y)处的像元值为对应的子影像在该像元(x,y)处的归一化水体指数ndwi;
[0219]
ndwi=(p(green)-p(nir))/(p(green) p(nir));
[0220]
p(green)和p(nir)分别为所述子影像在像元(x,y)处的绿波段光谱值和近红外波段光谱值。
[0221]
二值分割模块5,用于对每个子区域,分别利用每景子影像的分割阈值对该景子影像对应的归一化水体指数影像进行二值分割,得到二值影像;
[0222]
其中,若所述归一化水体指数影像在像元(x,y)处的像元值大于对应子影像的分割阈值,则所述二值影像在该像元(x,y)处的像元值为1,否则为0。
[0223]
镜像影像赋值模块6,用于对每个子区域,计算所述子区域中各个像元的枚举值,并将所有子区域的各个像元的枚举值赋值给所述镜像影像的相同位置的像元;
[0224]
当时,m
pixel
=1
[0225]
当时,m
pixel
=0
[0226]
其中,m
pixel
表示像元(x,y)的枚举值,n
pixel=1
表示一个子区域中所有二值影像在像元(x,y)处的像元值取值为1的数量,n
pixel=0
表示一个子区域中所有二值影像在像元(x,y)处的像元值取值为0的数量,n
pixel
=n
pixel=1
n
pixel=0
,p为设定的判读阈值系数。
[0227]
海岸线确定模块7,用于将所述镜像影像中像元值为1的像元和像元值为0的像元的边界作为海岸线。
[0228]
海岸线类型属性确定模块8,用于利用待检测区域的海岸带土地利用分类数据得到所述海岸线的类型属性。
[0229]
所述海岸线类型属性确定模块包括:
[0230]
数据相交单元,用于将所述海岸线与所述海岸带土地利用分类数据相交,得到一系列的交点。
[0231]
线段确定单元,用于在每个交点处,过所述交点做垂直于所述海岸线的线段,并且所述线段在所述海岸线两侧的长度分别为第一长度和第二长度。
[0232]
闭合矩形区域确定单元,用于对每一个交点,以该交点的线段作为矩形的一条边,过该交点的下一个交点做闭合矩形,得到一系列的闭合矩形区域。
[0233]
闭合矩形区域类型属性确定单元,用于对每个闭合矩形区域,根据所述闭合矩形区域内的海岸带土地利用分类数据确定所述闭合矩形区域的类型属性。
[0234]
海岸线类型属性确定单元,用于将所述闭合矩形区域的类型属性作为所述闭合矩形区域上的两个所述交点之间的一段海岸线的类型属性,得到所述海岸线的类型属性。
[0235]
所述闭合矩形区域类型属性确定单元包括:
[0236]
土地利用类型集合确定子单元,用于对每个闭合矩形区域,取该闭合矩形区域与所述海岸带土地利用分类数据的交面,并获取所述交面在所述海岸带土地利用分类数据上的土地利用类型集合。
[0237]
类型属性第一确定子单元,用于若闭合矩形区域的土地利用类型集合包括“砂滩或沙滩”、“滩涂或湿地或围涂”、“红树林或海草床或珊瑚礁”、“河流”,则将该闭合矩形区域的类型属性分别设置为“砂质岸线”、“泥质岸线”、“生物岸线”、“河口岸线”;
[0238]
或者,若闭合矩形区域的土地利用类型集合包括未经人为活动影响的土地利用类型,则将该闭合矩形区域的类型属性设置为“自然岸线”。
[0239]
类型属性第二确定子单元,用于若闭合矩形区域的土地利用类型集合包括“草地或林地或裸岩”,并且所述“草地或林地或裸岩”在所述闭合矩形区域中的占比大于第一比值,则将该闭合矩形区域的类型属性设置为“基岩岸线”,或者将该闭合矩形区域的类型属性设置为“自然岸线”。
[0240]
类型属性第三确定子单元,用于若闭合矩形区域的土地利用类型集合包括“旱地或水田”、“居住地或海岸围堤”、“码头或港口或渔港”、“交通用地”、“养殖”、“盐田”,并且所述“旱地或水田”、“居住地或海岸围堤”、“码头或港口或渔港”、“交通用地”、“养殖”、“盐田”在所述闭合矩形区域中的占比大于第二比值,则将该闭合矩形区域的类型属性分别设置为“农田围堤”、“建设围堤”、“码头围堤”、“交通围堤”、“养殖围堤”、“盐田围堤”。
[0241]
或者,若闭合矩形区域的土地利用类型集合包括经过人为活动影响的土地利用类型,则将该闭合矩形区域的类型属性设置为“人工岸线”。
[0242]
所述海岸线类型属性确定单元包括:
[0243]
数据关联子单元,用于对每一个闭合矩形区域,将所述闭合矩形区域上的两个所述交点之间的一段海岸线与所述闭合矩形区域关联。
[0244]
类型属性复制子单元,用于对每一个闭合矩形区域,将所述闭合矩形区域的类型属性复制到与所述闭合矩形区域关联的一段海岸线。
[0245]
对前述的任意一景子影像,其分割阈值可以通过如下过程确定:
[0246]
将所述分割阈值的取值在归一化水体指数的取值区间上按照设定步长遍历每一个值。
[0247]
对每个分割阈值的取值,将所述子影像对应的归一化水体指数影像的各个像元的像元值与所述分割阈值的取值进行比较,将所述归一化水体指数影像的像元值大于所述分割阈值的取值的像元分类到第一区域,否则分类到第二区域。
[0248]
对每个分割阈值的取值,计算所述分割阈值的取值对应的第一区域和第二区域的差别g;
[0249]
g=w0w1(μ
0-μ1)2[0250][0251][0252]
其中,n0和n1分别为所述第一区域和第二区域的像元数,μ0为所述第一区域的所有像元的像元值的平均值,μ1为所述第二区域的所有像元的像元值的平均值。
[0253]
找出所有分割阈值的取值对应的所述差别的最大值,所述最大值对应的分割阈值的取值即为所述子影像的分割阈值。
[0254]
所述数据获取模块包括:
[0255]
数据获取单元,用于获取卫星遥感影像、待检测区域范围矢量和海岸带土地利用分类数据。
[0256]
坐标变换单元,用于当所述卫星遥感影像、待检测区域范围矢量和海岸带土地利用分类数据的投影坐标不一致时,进行使投影坐标一致的坐标变换。
[0257]
裁剪单元,用于利用待检测区域范围矢量对所述卫星遥感影像进行裁剪,得到待检测区域的遥感影像。
[0258]
所述海岸线确定模块包括:
[0259]
合并分类单元,用于将所述镜像影像中像元值为1的像元合并为第一对象,将所述镜像影像中像元值为0的像元合并为第二对象。
[0260]
海岸线确定单元,用于将所述第一对象和第二对象的边界作为所述海岸线。
[0261]
所述装置还可以包括:
[0262]
修正模块,用于对所述海岸线进行平滑处理和拓扑检查。
[0263]
统计模块,用于对所述海岸线的地理空间位置、长度和各段海岸线的类型属性进行统计。
[0264]
本发明针对常规人工识别和勾绘方法的耗费人力多、精度得不到保证、效率低的问题,提出了融合多景遥感影像信息层及镜像影像提取海岸线的方法,并利用土地利用数据划分海岸线结点,判断海岸线类型属性。本发明是一种适应性较强的海岸线提取算法,解决了在各种影像成像条件下的海岸线空间位置提取和属性更新。利用多时相影像识别海岸线空间位置,解决了常规单一遥感影像受潮汐影响导致海岸线位置不确定、精度低、类型属性难以区分等缺陷;同时实现了岸线类型属性的自动化研判,提高了海岸线自动化解译的精度和时间效率。本发明能够准确、快速、自动化提取海岸线的空间位置和属性,为自然岸
线的保护与管理提供基础数据支撑,通过分析本发明提取的海岸线空间位置和类型属性的变化,可以满足海岸线生态破坏监管、自然岸线保有率核算、海岸工程监管、海岸线保护与管理等需求,在自然岸线保护及监督管理等方面具有较好的应用前景。
[0265]
本发明实施例所提供的装置,其实现原理及产生的技术效果和前述方法实施例相同,为简要描述,装置实施例部分未提及之处,可参考前述方法实施例1中相应内容。所属领域的技术人员可以清楚地了解到,为描述的方便和简洁,前述描述的装置和单元的具体工作过程,均可以参考上述方法实施例中的对应过程,在此不再赘述。
[0266]
最后应说明的是:以上所述实施例,仅为本发明的具体实施方式,用以说明本发明的技术方案,而非对其限制,本发明的保护范围并不局限于此,尽管参照前述实施例对本发明进行了详细的说明。本领域的普通技术人员应当理解:任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,其依然可以对前述实施例所记载的技术方案进行修改或可轻易想到变化,或者对其中部分技术特征进行等同替换;而这些修改、变化或者替换,并不使相应技术方案的本质脱离本发明实施例技术方案的精神和范围。都应涵盖在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。